一种三维打印机
文献发布时间:2023-06-19 12:04:09
技术领域
本发明涉及三维打印技术领域,尤其涉及一种三维打印机。
背景技术
3D打印设备又称三维打印设备(3Dimension Printer,3DP),是一种累积制造技术,即快速成形技术的一种设备,它是一种数字模型文件为基础,运用特殊蜡材、粉末状金属或塑料等可粘合材料,通过依次打印多层的粘合材料来制造三维的物体。
为了实现三维打印,需要利用设备带动打印头在空间内移动,一种现有的三维打印机为龙门式三维打印机,龙门式三维打印机通过沿XYZ三个方向设置的导轨实现带动打印头在空间内移动。然而现有的龙门式三维打印机中驱动导轨移动的稳定性差。
发明内容
本发明实施例提供一种三维打印机,以解决现有龙门式三维打印机占用的空间较大的问题。
本发明实施例提供了一种三维打印机,包括底座、第一导轨,滑轮、第二导轨和打印头;
所述第一导轨与所述底座连接,所述第一导轨沿第一方向延伸,所述第一导轨包括导轨本体和形成于所述导轨本体内的滑槽;
所述第二导轨与所述滑轮滚动连接,所述第二导轨沿第二方向延伸;所述滑轮可滚动地设置于所述滑槽内,所述滑轮与所述滑槽相匹配,所述滑轮在所述滑槽内滚动时,带动所述第二导轨相对所述第一导轨沿第一方向移动;
所述打印头可滑动的设置于所述第二导轨上。
在一些实施例中,所述滑槽包括开口、与所述开口相对的底面、位于所述开口和所述底面之间的两个侧壁,两个所述侧壁之间的距离大于所述开口的宽度,所述滑轮与所述侧壁相抵接,且所述滑轮与所述底面相分离。
在一些实施例中,设置于所述滑槽内的滑轮的数量为至少两个,所述滑槽的两个侧壁中,每个侧壁至少与一个所述滑轮抵接。
在一些实施例中,所述滑槽内的滑轮包括一列,每个滑轮同时与所述滑槽的两个侧壁抵接;或,
所述滑槽内的滑轮包括两列,分别为第一列的滑轮和第二列的滑轮;所述第一列的滑轮与一个所述侧壁抵接,所述第二列的滑轮与另一个所述侧壁抵接。
在一些实施例中,所述侧壁包括相对设置的第一侧壁和第二侧壁,以及位于所述第一侧壁和所述第二侧壁之间的镂空区,所述滑轮与所述第一侧壁和所述第二侧壁相抵接,所述第一侧壁和所述第二侧壁呈夹角设置。
在一些实施例中,所述滑轮包括相对设置的第一斜面、第二斜面以及与所述第一斜面和所述第二斜面连接的旋转面,所述第一斜面与所述第一侧壁抵接,所述第二斜面与所述第二侧壁抵接。
在一些实施例中,所述镂空区的宽度大于所述旋转面的宽度;
所述第一侧壁包括第一接触壁和与所述第一接触壁连接的第一让位壁,所述第一接触壁与所述第一让位壁位于不同的平面上,所述第一接触壁与所述第一斜面抵接,所述第一接触壁的宽度小于所述第一斜面的宽度;
所述第二侧壁包括第二接触壁与所述第二接触壁连接的第二让位壁,所述第二接触壁与所述第二让位壁位于不同的平面上,第二接触壁与所述第二斜面抵接,所述第二接触壁的宽度小于所述第二斜面的宽度。
在一些实施例中,所述第一让位壁与所述滑轮分离,所述第二让位壁与所述滑轮分离;
所述第一接触壁的宽度为所述第一斜面的宽度的二分之一到十分之九;所述第二接触壁的宽度为所述第二斜面宽度的二分之一到十分之九。
在一些实施例中,所述第一侧壁和所述第二侧壁之间的夹角为80至100°。
在一些实施例中,所述镂空区包括依次连通的第一镂空子区域、第二镂空子区域和第三镂空子区域,其中,所述第二镂空子区域位于所述第一侧壁和所述第二侧壁之间,所述第二镂空子区域的宽度大于所述旋转面的宽度,所述第一镂空子区域形成于位于所述第一侧壁远离所述底面的一侧,所述第三镂空子区域的位于所述第二侧壁远离所述开口的一侧,第一镂空子区域和所述第三镂空子区域用于固定所述第一导轨。
本发明实施例通过设置位于第一导轨的导轨本体内的滑槽,并通过位于滑槽内的滑轮实现第一导轨与第二导轨之间的滑动连接,由于滑轮与滑槽相匹配,滑槽能对滑轮进行卡位,防止滑轮在滑槽中晃动,使滑轮和与滑轮连接第二导轨在相对第一导轨滑动时,滑动更稳定,不会发生摇晃及噪音,且滑槽中内置滑轮的结构简单,充分利用了第一导轨内部的空间,滑轮不会占用第一导轨外部的空间,减少了滑轮对于空间的占用,以便于在第一导轨上设置其他结构,同时,也避免了滑轮等结构对其他结构可能产生的干扰,另由于滑轮内置于第一导轨的滑槽中,也能缩短第二导轨的长度,减小三维打印机的体积,且第一导轨中开设滑槽,节省了第一导轨的材料,使得三维打印机的成本得以降低。
附图说明
为了更清楚地说明本发明实施例的技术方案,下面将对本发明实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获取其他的附图。
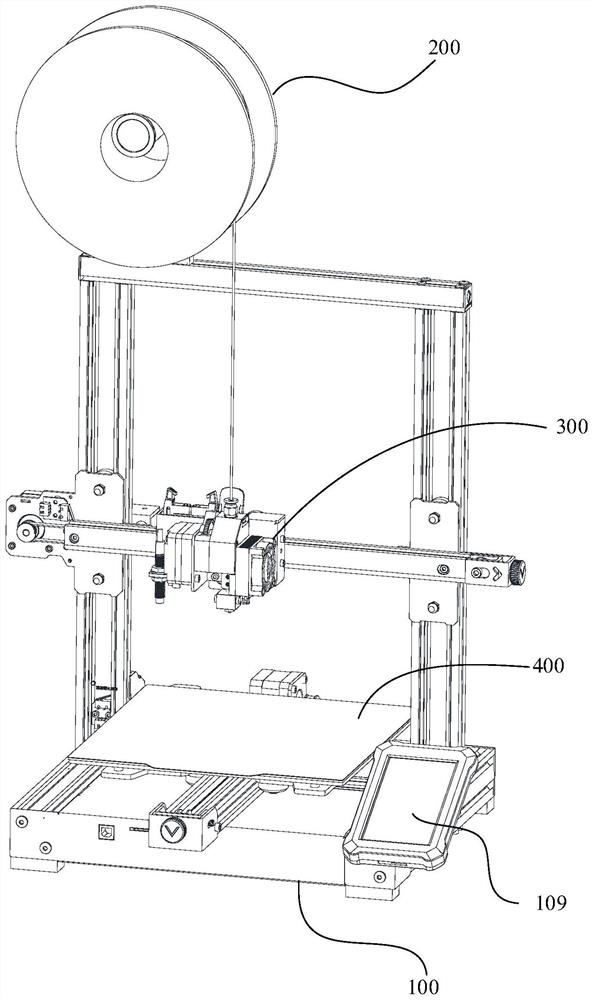
图1是本发明一实施例中三维打印机的结构示意图;
图2是本发明一实施例中三维打印机的底座的结构示意图;
图3是本发明一实施例中三维打印机的底座的分解结构示意图;
图4是本发明一实施例中主体框架的结构示意图;
图5是本发明一实施例中触控显示模组的结构示意图;
图6是本发明一实施例中耗材组件的结构示意图;
图7是本发明一实施例中耗材组件的分解结构示意图;
图8是本发明一实施例中打印平台的分解结构示意图;
图9是本发明一实施例中打印头的分解结构示意图;
图10是本发明一实施例中打印头的结构示意图;
图11是本发明一实施例中XZ轴模组的结构示意图;
图12是本发明一实施例中打印平台和Y轴模组的结构示意图;
图13是本发明一实施例中Y轴模组的分解结构示意图;
图14是本发明一实施例中第二导轨和打印头的结构示意图;
图15是本发明一实施例中第二导轨的分解结构示意图;
图16是本发明一实施例中第二导轨驱动组件的结构示意图;
图17是本发明一实施例中Y轴张紧器的结构示意图;
图18是本发明一实施例中第一导轨的局部结构示意图;
图19是本发明一实施例中滑轮的结构示意图;
图20是本发明一实施例中第一导轨的导轨本体的截面示意图;
图21是本发明一实施例中第一导轨与滑轮配合的截面示意图;
图22是本发明一实施例中第一导轨和滑轮的配合关系示意图;
图23是本发明一实施例中第一导轨的截面示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。不冲突的情况下,下述实施例及实施例中的特征可以相互组合。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获取的所有其他实施例,都属于本发明保护的范围。
本发明实施例提供了一种三维打印机。
实施时,通过移动模组控制打印头与目标位置在三个自由度上的相对移动,并进一步控制打印头将耗材推送至指定的位置,实现在目标位置完成产品的打印。
如图1所示,在本发明的一实施例中,三维打印机包括底座100、耗材组件200、打印头300、打印平台400和移动组件。
底座100主要用于承载该三维打印机,底座100可以具有一定的重量,从而保证三维打印机工作过程中的稳定性。
如图2至图4所示,在其中一个实施例中,底座100包括底板101、盖板102A/102B、主体框架103以及电气元件。
请同时参阅图3和图4,本实施例中,主体框架103是由多个型材103A/103B/103C通过紧固件拼接呈的工字型结构,其中,型材103A/103B的端部可以通过端板1031密封,以避免灰尘等侵入。主体框架103设置于底板101上,盖板102A/102B覆盖于主体框架103远离底板101的一侧,底板101底部还可以设置减震垫104,底板101上方进一步设置所需的电气元件,电气元件包括电源盒105、插座106、电路板107、散热器108等。
底座100进一步还可以包括显示模组和控制面板,如图5所示,本实施例中,通过一触控显示模组109实现上述功能,触控显示模组109具体包括显示屏支架1091、显示屏下盖板1092、触控显示屏1093和显示屏上盖板1094,触控显示屏1093设置于显示屏下盖板1092和显示屏上盖板1094之间,并进一步通过显示屏支架1091固定于底座100上的指定位置。
该触控显示模组109用于显示与三维打印机工作的相关信息,以及显示触控界面,以供输入控制指令。
如图6和图7所示,耗材组件200用于提供三维打印过程中使用的耗材,本实施例中,耗材组件200包括滚轮201、滚轴202和滚轮支架203,实施时,滚轮201与滚轮支架203转动连接,滚轴202与滚轮支架203可以固定连接,也可以转动连接,可以理解为,滚轮201可以单独相对于滚轮支架203转动,滚轮201也可以和滚轴202同时相对于滚轮支架203转动。待推送耗材205缠绕在滚轴202上,然后利用滚轴端盖204将滚轴202限位于滚轮支架203上,此时,滚轴202与滚轮支架203固定连接或转动连接。
工作过程中,待推送耗材205被推送至打印头300,在待推送耗材205的牵引下,滚轮201逐渐转动,同时也使得缠绕于滚轮201上的待推送耗材205逐渐释放,进一步的,通过打印头300将待推送耗材205打印至指定的位置。
打印平台400对应上述目标位置,即进行产品打印的位置,实施时,耗材的材料通过打印头推送至打印平台400上,以形成待打印的产品。
如图8所示,在一个实施例中,打印平台400包括平台底板401、弹簧钢板402、磁吸板403、平台基板404和线卡405,其中,平台底板401和平台基板404共同构成打印平台的基座,平台底板401和平台基板404之间设置有垫平柱406,以提高平台基板404的平整度,进一步的,将磁吸板403固定在平台基板404上,使得磁吸板403同样具有较高的平整度,磁吸板403具有一定的磁性,因此可以吸附弹簧钢板402,弹簧钢板402用于承载待打印的产品,弹簧钢板402和磁吸板403通过磁性连接,在打印过程中能够平整的吸附弹簧钢板402,确保打印效果,在打印完成之后,也能够方便快捷的取下弹簧钢板402,从而实现打印完成的产品的回收。
线卡405相对于平台底板401固定设置,实施时,移动组件通过线卡405带动打印平台400移动。
如图9和图10所示,打印头300主要包括打印头支架301、感应开关302、推送组件、加热组件和散热组件。
打印头支架301由一个或多个板材构成,打印头支架301用于支撑和安装其他零部件。
感应开关302具体可以是电感接近开关等用于实现位置检测的传感器,感应开关302固定于打印头支架301上,且用于检测打印头的水平度。实施时,可以设置多个感应探测点,并通过感应开关302感应各探测点的位置,之后根据探测结果确定打印头300的当前姿态,并进一步对打印头300的姿态进行调节,例如,可以对打印头300进行水平调节,通过设置该感应开关302,能够实现自动调平功能,探测准确,方便调节,降低初级使用者的使用难度。
推送组件包括快接头3031、推送电机3032、电机固定座3033、电机齿轮3034、减速传动组件3035、主动轮3036和从动轮3037。
工作过程中,耗材通过快接头3031接入,推送电机3032通过电机固定座3033固定在打印头支架301上,推送电机3032带动电机齿轮3034转动,电机齿轮3034进一步通过减速传动组件3035带动主动轮3036转动,快接头3031的出口位于主动轮3036和从动轮3037之间,这样,通过快接头3031接入的耗材能够进入主动轮3036和从动轮3037之间,耗材进一步能够在主动轮3036的带动下移动,从而实现耗材的推送。
从动轮3037可转动的安装在手柄3038上,手柄3038通过连接杆3039与打印头支架301相连,连接杆3039处设置有弹性件3030,通过调节连接杆3039的位置,能够实现调节弹性件3030的压缩程度,从而提供不同的弹力,这样,就实现了对于主动轮3036和从动轮3037之间压力大小的调节。
加热组件包括隔热管3041、喉管固定件3042、喉管3042、加热块3044、热敏电阻3045、喷嘴3046和加热棒3047,其中,隔热管3041用于避免加热组件产生的热量传递至其他结构,喉管固定件3042用于固定喉管3043,而喉管3043则用于实现耗材的传输,喉管3043位于主动轮3036和从动轮3037之间,喉管3043的入口朝向快接头3031的出口设置,这样,耗材在由快接头3031的出口离开快接头后,进入主动轮3036和从动轮3037之间,并进一步进入喉管3043中。
接下来,耗材在加热块3044处进行加热操作,加热的热量由加热棒3047提供,热敏电阻3045也可以替换为其他温度传感器,工作过程中,通过热敏电阻3045检测加热温度,并进一步根据检测结果对加热进程进行控制,从而使得耗材被加热至指定的温度,喷嘴3046设置于喉管3043远离主动轮3036的一端,加热完成的耗材最后通过喷嘴3046输出。
散热组件则用于实现喉管3042的散热,在一个实施例中,散热组件包括吹风机3051、导风件3052、散热片3053、散热风扇3054以及风扇保护网3055,通过吹风机3051。喉管3042处的热量传导至散热片3053,进一步通过散热风扇3054吹风散热,相对于现有技术中通过风扇直接朝向热源设置,本实施例的技术方案,可缩短打印头300整机高度,减少喷嘴3046晃动,提高打印头打印的可靠性。
在一个实施例中,移动组件包括带动打印头300移动的第一移动模组以及带动打印平台400移动的第二移动模组。第一移动模组和第二移动模组都可以固定于底座。
移动组件用于调整打印头300和目标位置之间的相对位置,本实施例中以目标位置位于一打印平台400上做示例性说明。
本实施例中,移动组件能够带动打印头300和打印平台400相对于底座100移动,换句话说,打印平台400并非相对于底座固定不动的,而是具有一个自由度,相应的,打印头300具有两个自由度,从而能够实现打印头300和打印平台400之间的相对移动。
第一移动模组则用于带动打印头300沿第一方向和第二方向移动,第二移动模组用于带动打印平台400沿第三方向移动。第一方向、第二方向和第三方向不在同一平面内且均不相互平行,从而实现带动打印平台400相对于打印头300在三维空间内移动。
本实施例中,以第一方向、第二方向和第三方向之间两两相互垂直做示例性说明,即第一方向、第二方向和第三方向分别对应空间直角坐标中的Z方向、X方向和Y方向。相应的,本实施例中,又将第一移动模组称作XZ轴模组,将第二移动模组称作Y轴模组。
可以理解,本申请中,并不限定第一方向、第二方向和第三方向之间两两相互垂直,第一方向、第二方向和第三方向不在同一平面内且均不相互平行,能实现打印平台400相对于打印头300在三维空间内移动即可。
如图11所示,XZ轴模组包括第一导轨601和第二导轨701,第一导轨601与底座100连接,第一导轨601沿着第一方向延伸,这里,第一方向可以对应Z方向,第二导轨701可滑动的设置于第一导轨601上,这样,第二导轨701可以在第一导轨601上沿着Z方向移动。
可选地,第一导轨601包括两个,则第二导轨701可滑动的设置于两个第一导轨601上。第二导轨701同时在两个第一导轨601上滑动,增加了第二导轨701滑动的平衡性,第二导轨701可以承载更多的负载。
如图12和图13所示,Y轴模组包括第三导轨501,第三导轨501固定在底座上,第三导轨501沿第三方向延伸,这里,第三方向指的是Y方向,打印平台400可滑动的设置在第三导轨501上,当打印平台400在第三导轨501上滑动时,打印平台400沿着Y方向移动。
第二导轨701沿第二方向延伸,如图11、图14和图15所示,打印头300可滑动的设置于第二导轨701上。具体的,三维打印机还包括打印头驱动组件,打印头驱动组件包括X轴皮带702和X轴电机704。X轴电机704可以固定在第二导轨701上,X轴电机704通过X轴皮带702与打印头300连接,X轴皮带702可以在X轴电机704的带动下转动,以使打印头300在X轴皮带702的带动下,沿着第二导轨701滑动,也就是说,打印头300可以在第二导轨701上沿着X方向移动,通过第二导轨701和打印头300相配合,能够实现控制打印头300在X方向的位置。
如图16所示,在一个实施例中,XZ轴模组还包括第二导轨驱动组件,第二导轨驱动组件包括丝杆604、联轴器603和驱动电机602,驱动电机602设置于底座100上,驱动电机602的输出端与丝杆相连,丝杆604与第二导轨701传动连接,驱动电机602用于通过丝杆604驱动第二导轨701沿第一方向移动。其中,丝杆604与第一导轨601平行设置。驱动电机602可以通过联轴器603与丝杆604连接,以驱动丝杆604转动,以通过驱动电机602驱动第二导轨701沿丝杆604的方向移动,也就是带动第二导轨701沿着Z方向移动。
可选地,如图12和图13所示,Y轴模组还包括Y轴电机502、Y轴电机安装支架503、Y轴皮带504和Y轴张紧器505,Y轴电机502通过Y轴电机安装支架503安装在底座100上,Y轴皮带504与线卡405连接,Y轴电机502用于驱动Y轴皮带504转动,从而通过Y轴皮带504带动线卡405移动,实现控制打印平台400沿第三导轨501移动。
通过XZ轴模组带动打印头300移动,配合Y轴模组带动打印平台400移动,能够实现打印头300和打印平台400在三个自由度上的相对移动。
应当理解的是,如果Y轴皮带504过于松弛或过于紧绷,可能导致带动线卡405移动的稳定性和移动距离控制的准确程度下降,如图13和图17所示,本实施例中进一步设置Y轴张紧器505,以调节Y轴皮带504的张紧程度,Y轴皮带504绕过该Y轴张紧器505,从而能够通过Y轴张紧器505调节Y轴皮带504的张紧程度。
如图13和图17所示,Y轴张紧器505包括外部支架5051、内部支架5052、皮带轮5053、转轴5054和旋钮5055,如图13所示,转轴5054穿设于皮带轮5053中,皮带轮5053可相对转轴5054转动,外部支架5051、内部支架5052均设置有转轴固定孔,其中,内部支架5052的转轴固定孔与转轴尺寸一致,外部支架5051的转轴固定孔尺寸大于转轴尺寸,旋钮5055穿过外部支架5051与内部支架5052相连,这样,当旋转旋钮5055时,能够控制内部支架5052靠近或远离外部支架5051,Y轴皮带504套设在皮带轮5053上,通过调节内部支架5052和外部支架5051的相对位置,能够实现调节Y轴皮带504的张紧程度。
如图14和图15所示,XZ轴模组还包括控制X轴皮带702张紧度的X轴张紧器703,X轴张紧器703的结构可以参考上述Y轴张紧器505,并能起到调节X轴皮带702张紧度的作用,此处不再赘述。
如图18所示,三维打印机还包括滑轮6013,第一导轨601包括导轨本体6011和形成于导轨本体6011内的滑槽6012,第二导轨701与滑轮6013滚动连接;滑轮6013可滚动地设置于滑槽6012内,滑轮6013与滑槽6012相匹配,滑轮6013在滑槽6012内滚动时,带动第二导轨701相对第一导轨601沿第一方向移动,即使第二导轨701能沿着第一导轨601相对滑动。可以理解,滑轮6013与第二导轨701连接时,滑轮6013能够转动。
请参阅图19和图20,滑轮6013包括轮子内圈(图未示)和与所述轮子内圈转动连接的轮子外圈6014,滑轮6013的轮子外圈6014包括相对设置的第一斜面6015、第二斜面6016以及与第一斜面6015和第二斜面6016连接的旋转面6017,第一斜面6015和第二斜面6016抵接用于与滑槽6012的侧壁60123抵接。
本发明实施例通过设置位于导轨本体6011内的滑槽6012,并通过位于滑槽6012内的滑轮6013实现第一导轨601与第二导轨701之间的滑动连接,由于滑轮6013与滑槽6012相匹配,滑槽6012能对滑轮6013进行卡位,防止滑轮6013在滑槽6012中晃动,使滑轮6013和与滑轮6013连接第二导轨701在相对第一导轨601滑动时,滑动的更稳定,不会发生摇晃及噪音,且滑槽6012中内置滑轮6013的结构简单,充分利用了第一导轨601内部的空间,滑轮6013不会占用第一导轨601外部的空间,减少了滑轮6013对于空间的占用,以便于在第一导轨601上设置其他结构,同时,也避免了滑轮6013等结构对其他结构可能产生的干扰,另由于滑轮6013内置于第一导轨601的滑槽中,也能缩短第二导轨701的长度,减小三维打印机的体积,且第一导轨601中开设滑槽6012,节省了第一导轨601的材料,使得三维打印机的成本得以降低。有助于简化三维打印机的结构,减少了对于空间的占用。
如图20所示,在其中一些实施例中,滑槽6012包括开口60121、与开口60121相对的底面60122、位于开口60121和底面60122之间的两个侧壁60123,滑轮6013与侧壁60123相抵接,且滑轮6013与底面60122相分离。
在其中一些实施例中,两个侧壁60123之间的距离大于开口60121的宽度。
如图21所示,可以理解为,滑轮6013被限制于滑槽6012内,且仅能由滑槽6012的端部离开滑槽6012,而不能由开口60121处离开滑槽,确保滑轮6013能够在滑槽6012内持续滑动。
在其中一些实施例中,设置于每一滑槽6012内的滑轮6013的数量为至少两个,沿第一方向上,设置于同一滑槽6012内的滑轮6013至少存在两个交错设置。设置于同一滑槽6012内且交错设置的滑轮6013分别与滑槽6012不同的侧壁60123相抵接。
如图22所示,在一些实施例中,沿第一方向上,设置有两列滑轮6013,每一列滑轮6013的数量可以为一个或多个,每一列滑轮6013仅与一个侧壁60123相抵接。其中,两列滑轮6013分别为第一列的滑轮6013和第二列的滑轮6013,第一列的滑轮6013与其中一个侧壁60123抵接,第二列的滑轮6013与另一个侧壁60123抵接。应当理解的是,每一列滑轮6013指的是沿着第一方向上,中心线位于同一直线上的滑轮6013,图21中以不同的填充效果分别示意出两列滑轮,左侧一列滑轮6013仅与左侧的侧壁60123相抵接,而与右侧的侧壁60123相分离,而右侧的一列滑轮6013仅与右侧的侧壁60123相抵接,而与左侧的侧壁60123相分离,从而有助于提高滑轮滑动的稳定性。
在另外一些实施例中,也可以仅设置一列滑轮6013,且这一列每个滑轮6013同时与滑槽6012的两个侧壁60123抵接。
请参阅图21,可以理解为,若设置有两列滑轮6013,沿着Z方向观察时,多个滑轮6013并非重合的,其位置是交错的,一部分滑轮6013与图20所示的左侧侧壁60123相抵接,另外一部分滑轮6013与图20所示的右侧侧壁60123相抵接,从而有助于提高第二导轨701滑动的稳定性。
在其中一些实施例中,每一侧壁60123包括相对设置的第一侧壁60123A和第二侧壁60123B,以及位于第一侧壁60123A和第二侧壁60123B之间的镂空区60123C,滑轮6013与第一侧壁60123A和第二侧壁60123B相抵接,即第一斜面6015与第一侧壁60123A抵接,第二斜面6016与第二侧壁60123B抵接。可选地,第一侧壁60123A和所述第二侧壁60123B呈夹角设置,从而与第一侧壁60123A和第二侧壁60123B夹持滑轮,使滑轮6013不能向开口60121的方向以及底面60122的方向移动。可选的,镂空区60123C的宽度大于旋转面6017的宽度,从而旋转面6017不会和第一导轨601接触。
请参阅图23,可选的,第一侧壁60123A包括第一接触壁60124和与第一接触壁连接的第一让位壁60125,第一接触壁60124与第一让位壁60125位于不同的平面上,第一接触壁60124与第一斜面6015抵接,第一让位壁60125与滑轮6013分离,第一接触壁60124的宽度小于第一斜面6015的宽度;第二侧壁60123B包括第二接触壁60126与第二接触壁60126连接的第二让位壁60127,第二接触壁60126与第二让位壁位60127于不同的平面上,第二接触壁60126与第二斜面6016抵接,第二让位壁60127与滑轮6013分离,第二接触壁60126的宽度小于第二斜面6016的宽度。可以理解,第一接触壁60124和第一让位壁60125连接时,可以以斜面连接,或以弧面连接等。第二接触壁60126和第二让位壁60127连接时,可以以斜面连接,或以弧面连接等。
本申请中,镂空区60123C的宽度大于旋转面6017的宽度,第一接触壁60124的宽度小于第一斜面6015的宽度,第二接触壁60126的宽度小于第二斜面6016的宽度,从而滑轮6013仅通过第一斜面6015、第二斜面6016与第一导轨601的滑槽6012抵接,在滑轮6012制作过程中,若第一斜面6015与旋转面6017的连接处有问题,或第二斜面6016与旋转面6017的连接处有问题,也不会影响第二导轨701相对第一导轨601滑动的稳定性。
可选地,第一接触壁60124的宽度D1为第一斜面6015的宽度D2的二分之一到十分之九;第二接触壁60126的宽度为第二斜面6016宽度的二分之一到十分之九。第一接触壁60124与第二接触壁60126的宽度较宽,即第二导轨701与第一导轨601的接触面积大,可以进一步提高第二导轨701相对第一导轨601滑动的稳定性。
如图21所示,第一侧壁60123A和第二侧壁60123B之间的夹角A为80至100°,本实施例中,可以控制夹角A为90°,有助于提高滑轮滑动的稳定性。
本实施例的技术方案中,滑轮6013与第一侧壁60123A和第二侧壁60123B的贴合效果较好,第二导轨701移动过程中产生的晃动较小,运动平缓安静,有助于提高Z轴运动的导向精度,进而提高三维打印机的可靠性和稳定性。
在其中一些实施例中,镂空区60123C包括依次连通的第一镂空子区域60123C1、第二镂空子区域60123C2和第三镂空子区域60123C3,其中,第二镂空子区域60123C2位于第一侧壁60123A和第二侧壁60123B之间,第一镂空子区域60123C1形成于位于第一侧壁60123A远离底面的一侧,第三镂空子区域60123C3的位于第二侧壁60123B远离开口60121的一侧。第一镂空子区域60123C1和所述第三镂空子区域60123C3用于固定所述第一导轨601。
在其中一些实施例中,在第一导轨601垂直于第一方向的截面中,第一侧壁60123A和第一镂空子区域60123C1沿第二方向列布,第二侧壁60123B和第二镂空子区域60123C2沿第二方向列布。
在其中一些实施例中,在第一导轨601垂直于第一方向的截面中,第一镂空子区域60123C1的部分呈弧形,第二镂空子区域60123C2的部分呈弧形。
本申请中,其中,滑轮6013与滑槽6012相匹配,即滑轮6013的形状与滑槽6012的形状相匹配。如本申请中,滑轮6013与第一侧壁60123A和第二侧壁60123B相抵接,在滑轮6013的形状与滑槽6012的形状相匹配时,才能够抵接。可选地,滑轮6012的形状与滑槽6012的形状也可以为其他形状,滑轮6013与滑槽6012相匹配即可,以使滑轮6013能稳定的在滑槽6012内滑动。
可以理解,第一导轨601包括两个时,两个第一导轨601平行设置,每个第一导轨601的滑槽6012内都可滚动的设置滑轮6013,滑轮6013与滑槽6012相匹配,滑轮6013在滑槽6012内滚动时,带动第二导轨701相对两个第一导轨601沿第一方向移动。若第一导轨601包括两个,由于滑轮6013与滑槽6012相匹配,在其中一个第一导轨601因制造等原因变形时,如包括扭曲的情形,由于另一个第一导轨601的滑槽6012会对滑轮6013进行固定,能防止第二导轨701偏转,进一步增加了第二导轨701滑动过程中的稳固性。
以上,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以权利要求的保护范围为准。
- 用于三维打印机的曝光装置、三维打印机和三维打印方法
- 用于三维打印机的曝光装置、三维打印机和三维打印方法