传动系统
文献发布时间:2023-06-19 12:14:58
技术领域
本发明涉及传动系统,更详细而言,涉及具备与车辆的驱动力的控制有关系的多个转矩设备的传动系统。
背景技术
例如,专利文献1公开了一种车辆控制装置。在该车辆控制装置中,对于车辆的多种控制参数,从具有各个目的的多个控制逻辑分别输出要求。在此所说的控制参数例如是指内燃机的转矩和空燃比,各个目的例如是指废气排放降低和燃料消耗率降低。所输出的要求被按控制参数的种类来进行仲裁,其结果,可决定各控制参数的目标值。另外,从各个控制逻辑也输出与上述要求之间的优先顺位有关的信息。因此,根据上述车辆控制装置,在决定各控制参数的目标值时,基于所输出的优先顺位对来自多个控制逻辑的要求进行仲裁。
现有技术文献
专利文献1:日本特开2009-047099号公报
发明内容
发明要解决的技术问题
已知具备与车辆的驱动力的控制有关系的多个转矩设备(例如内燃机和电动发电机)的传动系统。在这样的传动系统中,希望决定多个转矩设备的多个操作量(例如发动机转矩和马达转矩)以使得最大限度地实现控制对象的多个状态量(例如车辆驱动转矩和电池的充放电量)各自的目标状态量。
在此,传动系统中的状态量和操作量具有各种各样的制约。因此,希望能够在那样的制约内决定操作量以使得最大限度地实现目标状态量。并且,也希望成为所构建的转矩设备控制的基础的控制构造具备能够容易地应用于结构不同的其他传动系统的通用性。
为了满足上述要求,考虑基于对控制对象的多个状态量和多个转矩设备的多个操作量的关系进行规定的线性的状态方程式,通过求解线性规划问题来决定在满足传动系统的多个制约条件的范围内最大限度地实现多个目标状态量的最佳操作量的组合。另一方面,上述多个转矩设备有时包括第1转矩设备(例如电动发电机)、和输出的响应延迟比第1转矩设备大的第2转矩设备(例如内燃机)。在这样包括响应性存在差异的第1转矩设备和第2转矩设备的情况下,为了同时适当地决定全部的操作量,考虑采用如下那样的方法。
即,首先通过求解如上述那样的线性规划问题,算出第1转矩设备和第2转矩设备的最佳操作量的组合。然后,对响应延迟大的第2转矩设备指示所算出的操作量,并且,算出反映了第2转矩设备的输出相对于该操作量的响应延迟的预测操作量。在那之后,考虑基于代入了该预测操作量的状态方程式,通过再次求解线性规划问题来决定其余的第1转矩设备的最佳操作量。然而,在这样的方法中,为了决定全部的第1转矩设备和第2转矩设备的最佳操作量的组合,需要进行再计算(即进行两次最佳操作量的搜索)。这牵涉到控制装置的运算量的增加(计算负荷的增加)。
本发明是鉴于如上述那样的问题而完成的,目的在于提供一种传动系统,其即使是在具备响应性不同的第1转矩设备和第2转矩设备的情况下,也能够在抑制运算量的增加的同时适当地决定该第1转矩设备和第2转矩设备各自的操作量,以使得在满足多个制约条件的同时最大限度地实现多个目标状态量,并且,能够构建通用性高的控制构造(控制平台)。
用于解决问题的技术方案
本发明涉及的传动系统具备与车辆的驱动力的控制有关系的第1转矩设备和第2转矩设备以及对第1转矩设备和第2转矩设备进行控制的控制装置。第2转矩设备的输出的响应延迟比第1转矩设备大。
控制装置包括:
操作量决定部,其基于对传动系统的控制对象的多个状态量与作为第1转矩设备以及第2转矩设备各自的操作量的第1操作量以及第2操作量的关系进行规定的线性的状态方程式,通过求解线性规划问题来决定并输出在满足传动系统的多个制约条件的范围内最大限度地实现作为多个状态量的目标值的多个目标状态量的第1操作量和第2操作量;和
转矩设备控制部,其按照从操作量决定部输出的第1操作量和第2操作量,对第1转矩设备和第2转矩设备进行控制。
多个制约条件包括可达到操作量的最大值和最小值来作为第2操作量的上下限制约值,所述可达到操作量是在接下来的时间步骤中能够达到的第2操作量。
控制装置还包括操作量上下限算出部,操作量上下限算出部基于当前的时间步骤中的第2转矩设备的转速和推定操作量,算出可达到操作量的最大值和最小值来作为第2操作量的上下限制约值。
操作量决定部也可以包括操作量修正部,操作量修正部对通过求解线性规划问题决定的第2操作量的决定值进行修正。操作量修正部也可以通过按照第2转矩设备的响应延迟特性的逆特性来对决定值进行修正,从而算出在接下来的时间步骤中实现决定值的修正后第2操作量。并且,操作量决定部也可以向转矩设备控制部输出修正后第2操作量。
操作量决定部也可以通过在满足多个制约条件的范围内求解线性规划问题来决定按优先级从高到低的顺序最大限度地实现多个目标状态量的各个目标状态量的第1操作量和第2操作量。
操作量决定部也可以在若遵守多个制约条件则无法确定第1操作量和第2操作量的情况下,在按优先级从低到高的顺序放宽多个制约条件中的至少一个的同时,决定第1操作量和第2操作量。
多个制约条件也可以包括:与多个目标状态量有关的一个以上的第1制约条件;和与多个状态量的上限制约值和下限制约值中的至少一方有关的一个以上的第2制约条件。一个以上的第2制约条件的优先级比一个以上的第1制约条件的优先级高。
多个制约条件也可以包括与多个状态量的上限制约值和下限制约值中的至少一方有关的多个第2制约条件。并且,操作量决定部在若遵守所述多个制约条件则无法确定第1操作量和第2操作量时放宽多个第2制约条件的情况下,在按优先级从高到低的顺序使相对于与多个第2制约条件分别对应的上限制约值或者下限制约值的超过量最小化的同时,放宽多个第2制约条件。
发明的效果
根据本发明,通过基于对传动系统的控制对象的多个状态量与第1转矩设备以及第2转矩设备的操作量的关系进行规定的线性的状态方程式来求解线性规划问题,能够决定第1转矩设备和第2转矩设备的操作量(第1操作量和第2操作量)以使得在满足多个制约条件的同时最大限度地实现多个目标状态量。并且,使得能够按照所决定的第1操作量和第2操作量来控制第1转矩设备和第2转矩设备。
并且,根据本发明,为了对传动系统的驱动系统中的多个状态量(多个控制量)与第1操作量以及第2操作量的关系进行规定而使用了以线性方式表现的状态方程式。传动系统的驱动系统的状态方程式与系统结构无关而成为线性。因此,只是对被代入到状态方程式的状态量和第1操作量以及第2操作量的内容和数量适当地进行变更,就能够构建能容易地应用于具备任意的第1转矩设备和第2转矩设备的其他传动系统的通用性高的控制构造。
另外,根据本发明,传动系统的制约条件包括可达到操作量的最大值和最小值来作为第2操作量的上下限制约值,可达到操作量是在接下来的时间步骤中能够达到的第2操作量。与该可达到操作量有关的上下限制约值基于当前的时间步骤中的第2转矩设备的转速和推定操作量来算出。通过利用这样的上下限制约值,操作量决定部能够在接下来的时间步骤中能够达到的第2操作量的范围(即由上述的上下限制约值确定的范围)内选择第2操作量的同时,适当地决定包括第2操作量的全部操作量(第1操作量和第2操作量)。即,在考虑第2转矩设备的响应延迟的同时,只是进行一次的最佳操作量的搜索(也即是,在抑制运算量的增加的同时),就能够适当地决定全部操作量。
附图说明
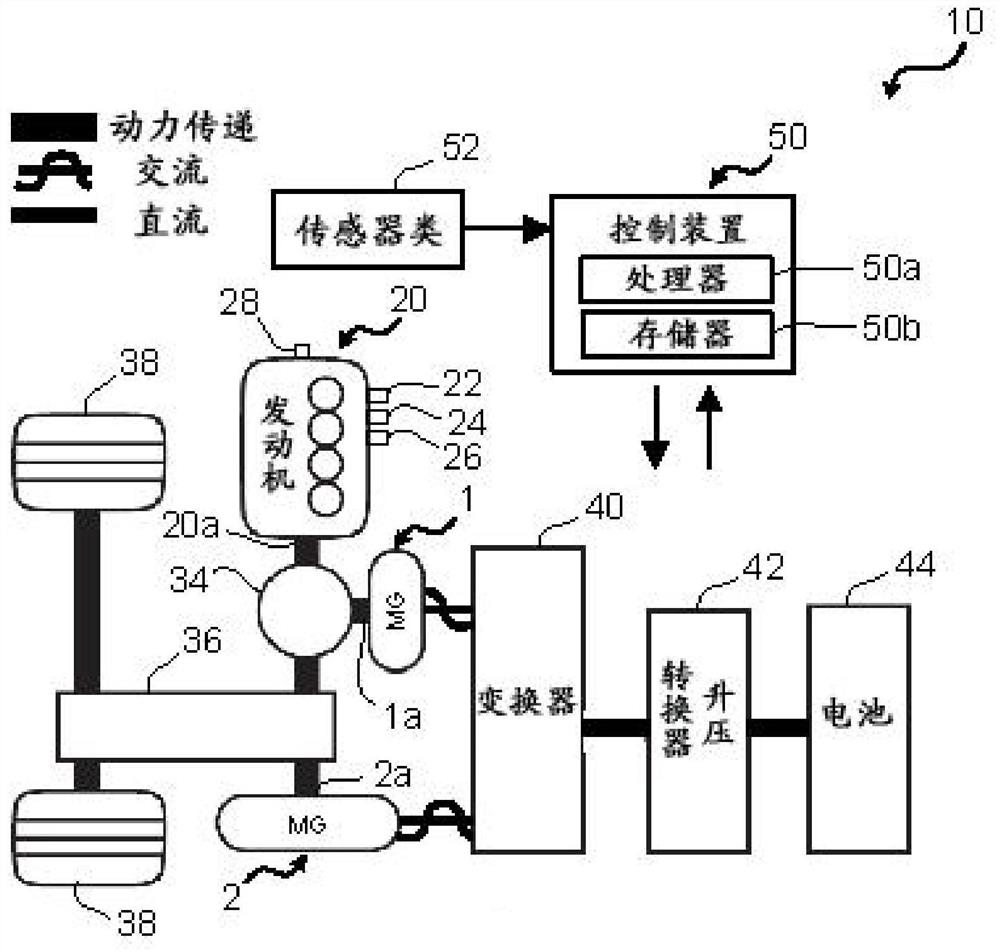
图1是用于对本发明的实施方式1涉及的传动系统的构成例进行说明的示意图。
图2是表示本发明的实施方式1涉及的与转矩设备控制关联的控制装置的功能构成的框图。
图3是表示了内燃机的输出(实际转矩Tea)相对于指示转矩Tereq的变化的响应延迟的曲线图。
图4是表示本发明的实施方式1涉及的与转矩设备控制有关的处理的例程的流程图。
图5的(A)是表示确定了当前的发动机转速Ne以及推定转矩Teest与上限制约值Temxr的关系的映射的图,图5的(B)是确定了当前的发动机转速Ne以及推定转矩Teest与下限制约值Temnr的关系的映射的图。
图6是用于对在考虑优先级P1~P3的同时搜索操作量的最佳解的算法的概要进行说明的概念图。
图7是用于对与有无设定优先顺位(优先级)相应的操作量的决定方法的不同进行说明的概念图。
图8是表示本发明的实施方式2涉及的与转矩设备控制关联的控制装置的功能构成的框图。
图9是用于对图8所示的操作量修正部的概要进行说明的曲线图。
图10是表示本发明的实施方式2涉及的与转矩设备控制有关的处理的例程的流程图。
图11是用于对本发明的实施方式3涉及的传动系统80的构成例进行说明的示意图。
图12是用于对本发明的实施方式4涉及的传动系统的构成例进行说明的示意图。
图13是用于对本发明的实施方式5涉及的传动系统的构成例进行说明的示意图。
图14是用于对本发明的实施方式6涉及的传动系统的构成例进行说明的示意图。
图15是用于对本发明的实施方式7涉及的传动系统的构成例进行说明的示意图。
图16是表示与本发明的实施方式9涉及的转矩设备控制有关的处理的例程的流程图。
图17是表示与在步骤S304的处理中利用的制约值的扩大方法的一个例子有关的例程的流程图。
图18是表示了通过图17所示的扩大方法而各控制量的各制约值变化下去的状况的一个例子的时间图。
图19是表示与在步骤S304的处理中利用的制约值的扩大方法的其他一个例子有关的例程的流程图。
标号说明
1、2 电动发电机(MG)
10、80、90、110、130、150 传动系统
20 内燃机
28 曲轴角传感器
34、132 动力分割机构
38 车轮
40、98、120 变换器
44、100、118 电池
50、70、84、96、116、144、152 控制装置
82 自动变速器
82a 自动变速器的离合器
92 发电机
94 电动机
114 电动发电机
138 低速用离合器
140 高速用离合器
156 后轮
162 前轮
164 爪形离合器
具体实施方式
以下,参照附图对本发明的实施方式进行说明。但是,在各图中对共同的要素标记同一标号,将重复的说明省略或者简略化。在以下所示的实施方式中,在提及了各要素的个数、数量、量、范围等的数的情况下,除了特别地明示了的情况、在原理上明确地被确定为该数的情况以外,本发明并不限定于该所提及的数。另外,对于在以下所示的实施方式中进行说明的构造、步骤等,除了特别地明示了的情况、在原理上明确地被确定为该构造、步骤等的情况以外并非在本发明中必须的。
1.实施方式1
首先,参照图1~图7对本发明的实施方式1进行说明。
1-1.传动系统的构成例
图1是用于对本发明的实施方式1涉及的传动系统10的构成例进行说明的示意图。图1所示的传动系统10具备内燃机20和两个电动发电机(即电动发电机(MG)1和电动发电机(MG)2)来作为车辆的动力源。即,作为一个例子,传动系统10应用于混合动力车辆。
内燃机20作为一个例子是火花点火式发动机。然而,成为本发明的对象的内燃机也可以是压缩着火式发动机,另外,其气缸数以及气缸配置不被特别地限定。内燃机20具备节气门22、燃料喷射阀24以及点火装置26来作为用于对发动机转矩Te进行控制的致动器。节气门22配置于进气通路(省略图示),对吸入空气流量进行控制。燃料喷射阀24配置于各气缸,例如向气缸内直接喷射燃料。点火装置26使用配置于各气缸的火花塞,对气缸内的混合气进行点火。另外,内燃机20具备使用于各种发动机控制的各种传感器。在此所说的各种传感器包括输出与曲轴角相应的信号的曲轴角传感器28。
MG1和MG2都是能够发电的电动机。即,MG1和MG2例如是兼具利用所供给的电力来输出转矩的作为电动机的功能、和将所输入的机械动力变换为电力的作为发电机的功能的交流同步型电动发电机。在图1所示的传动系统10中,MG1主要被作为发电机来使用,MG2主要被作为对车辆进行驱动的电动机来使用。
内燃机20、MG1以及MG2经由动力分割机构34和减速机构36而与车轮38连结。动力分割机构34例如为行星齿轮单元,将从内燃机20输出的发动机转矩Te分割至MG1和车轮38。更详细而言,在动力分割机构34中,太阳轮连结于MG1的输出轴1a,行星架连结于内燃机20的曲轴20a,齿圈连结于MG2的输出轴1a。从内燃机20输出的发动机转矩Te或者从MG2输出的MG2转矩Tm经由减速机构36被传递至车轮38。即,内燃机20和MG2产生车辆的驱动力,并且,对车辆的驱动力进行控制。MG1能够利用经由动力分割机构34从内燃机20供给的发动机转矩Te进行电力的再生发电。因此,MG1也被使用于对车辆的驱动力进行控制。另外,MG2在车辆减速时作为发电机发挥功能,回收车辆动能来变换为电力。
MG1和MG2经由变换器40以及升压转换器42与电池44进行电力的授受。变换器40将蓄积于电池44的电力从直流变换为交流并供给至MG2,并且,将通过MG1和MG2生成的电力从交流变换为直流并蓄积于电池44。因此,电池44通过由MG1以及MG2产生的电力被进行充电,通过由MG2消耗的电力被进行放电。升压转换器42根据需要使电池44的电压升压。
本实施方式的传动系统10还具备用于对动力系统(内燃机20、MG1以及MG2)进行控制的控制装置50。控制装置50是具有处理器50a和存储器50b的电子控制单元(ECU)。存储器50b存储用于对传动系统10进行控制的程序。处理器50a从存储器50b读出程序并进行执行。控制装置50从用于对动力系统进行控制的各种传感器取入传感器信号。另外,处理器50a使用所取入的传感器信号来执行各种程序,输出用于对动力系统的各种致动器进行操作的操作信号。
除了上述曲轴角传感器28等的用于发动机控制的各种传感器之外,在控制装置50还电连接有包括加速器位置传感器、制动器位置传感器、车速传感器以及MG1和MG2各自的电流传感器和旋转角传感器的传感器类52等的、使用于动力系统的控制的各种传感器。控制装置50能够使用来自曲轴角传感器28的信号来算出发动机转速Ne。另外,控制装置50能够根据经由MG1检测的内燃机20的转矩反作用力算出发动机转矩Te(推定转矩Teest)。
另外,在控制装置50电连接有用于对包括上述的内燃机20(节气门22、燃料喷射阀24以及点火装置26)、MG1以及MG2的动力系统进行控制的各种致动器。另外,控制装置50也可以由多个ECU构成。
1-2.实施方式1涉及的转矩设备控制
1-2-1.转矩设备控制的概要
传动系统10具备的转矩设备如上述那样为内燃机20、MG1以及MG2。图2是表示本发明的实施方式1涉及的与转矩设备控制关联的控制装置50的功能构成的框图。控制装置50为了进行转矩设备控制,包括“操作量决定部58”、“转矩设备控制部60”以及“操作量上下限算出部62”。
在本实施方式中通过传动系统10控制的状态量(即控制量)的一个例子为驱动转矩Tp、充放电量Pchg以及转速变化率dNg。驱动转矩Tp是指与车辆驱动力相关的车轮38的驱动转矩(Nm)。充放电量Pchg为电池44的充放电量(W),在此设为在充电时成为负、在放电时成为正。转速变化率dNg为MG1的转速变化率(Rad/s
此外,在利用图1所示的动力分割机构34的例子中,MG2的转速Nm根据车速来确定,因此,具有如下关系:若决定了MG1的转速Ng,则发动机转速Ne是确定的。因此,在本实施方式中,作为控制对象的状态量(控制量)之一,包括转速变化率dNg。另外,也可以代替MG1的转速变化率dNg,使用发动机转速变化率dNe来作为控制量之一。由于具有上述关系,因此,通过该例子也能够实现与利用MG1转速变化率dNg时同样的控制。另外,也可以代替转速变化率dNg、dNe,例如使用MG1转速Ng或者发动机转速Ne(rad/s)自身。
(操作量决定部)
操作量决定部58决定用于对上述状态量(Tp、Pchg、dNg)进行控制以使得接近各自的目标值(目标状态量)的最佳操作量。因此,操作量决定部58具有作为最佳操作量搜索器的功能。在本实施方式中使用的操作量的例子为发动机转矩Te、MG1转矩Tg以及MG2转矩Tm。
以下的式(1)是表示了控制量(Tp、Pchg、dNg)与操作量(Te、Tg、Tm)的关系的状态方程式。如该式(1)所示,传动系统10中的控制量与操作量的关系能够以线性(一次式)表现。
在式(1)中,对于c(c
操作量决定部58基于式(1)的状态方程式,通过求解线性规划问题来决定在满足传动系统10的制约条件的范围内最大限度地实现目标状态量的转矩设备的操作量。并且,操作量决定部58对转矩设备控制部60输出(指示)所决定的操作量(Tereq、Tgreq、Tmreq)。
进而,在本实施方式的操作量决定部58中,为了决定操作量,考虑3个目标状态量(Tp、Pchg、dNg)的优先级。具体而言,通过在满足上述制约条件的范围内求解线性规划问题来决定按优先级从高到低的顺序最大限度地实现3个目标状态量(Tp,Pchg,dNg)的各个目标状态量的操作量。因此,如图2所示,除了目标状态量和各种制约值(制约条件)之外,操作量决定部58的输入还包括优先级。另外,为了决定c
(转矩设备控制部)
图2所示的转矩设备控制部60按照通过操作量决定部58决定的操作量(Tereq、Tgreq、Tmreq),对各个转矩设备(内燃机20、MG1、MG2)进行控制。具体而言,关于内燃机20,转矩设备控制部60决定通过为了实现通过操作量决定部58决定的发动机转矩Tereq所需要的节气门开度、燃料喷射量以及点火正时的各目标值。其结果,用于发动机转矩控制的致动器(节气门22、燃料喷射阀24以及点火装置26)被进行控制以使实现通过转矩设备控制部60决定的各目标值。关于MG1和MG2,转矩设备控制部60也同样地决定为了实现通过操作量决定部58决定的MG转矩Tgreq、Tmreq所需要的电流值和频率等的预定的控制参数的各目标值。其结果,MG1和MG2通过变换器40的控制被进行控制以实现通过转矩设备控制部60决定的各目标值。
(目标函数)
接着,对为了在操作量决定部58中决定操作量所使用的线性规划问题的目标函数(评价函数)f1进行说明。以下的式(2)表示目标函数f1的一个例子。更详细而言,该线性规划问题是求出在制约条件下使目标函数f1为最小的解的最小化问题。以下,为了便于说明,将与目标函数f1有关的本线性规划问题也称为“线性规划问题F”。
最小化f1=P
在式(2)中,P
在本实施方式中,作为一个例子,优先级P
另外,在式(2)中,y
(制约条件)
上述制约条件的一个例子如以下的式(3)~(13)那样进行表示。
c
c
c
Tpmn≤c
Win≤c
dNgmn≤c
Temnr≤x
0≤x
Tgmn≤x
Tmmn≤x
y
上述各式中的变量x
式(6)中的Tpmn和Tpmx分别为驱动转矩Tp的下限制约值和上限制约值。式(7)的Win和Wout分别是充放电量Pchg的下限制约值和上限制约值。式(8)中的dNgmn和dNgmx分别是MG1转速变化率dNg的下限制约值和上限制约值。即,根据式(6)~(8),表示了各个状态量(Tp、Pchg、dNg)的制约范围。
在传动系统10中使用的转矩设备为内燃机20、MG1以及MG2。图3是表示了内燃机20的输出(实际转矩Tea)相对于指示转矩Tereq的变化的响应延迟的曲线图。由于内燃机20的进气系统的延迟以及燃烧的延迟等的各种延迟原因的影响,实际转矩Tea如图3所示那样相对于指示转矩Tereq(操作量)的变化而伴随有延迟地进行变化。因此,对于实际值相对于转矩设备的指示值的响应延迟,内燃机20一方要比MG1和MG2大。此外,MG1和MG2相当于本发明涉及的“第1转矩设备”的一个例子,内燃机20相当于本发明涉及的“第2转矩设备”的一个例子。并且,MG1转矩Tg和MG2转矩Tm相当于本发明涉及的“第1操作量”的一个例子,发动机转矩Te相当于本发明涉及的“第2操作量”的一个例子。
通过控制装置50进行的传动系统10的控制按预定的时间步骤(即预定的控制周期)来执行。式(9)中的Temxr和Temnr分别相当于与可达到转矩有关的上下限制约值,可达到转矩是在接下来的时间步骤中能够达到的发动机转矩Te(即第2转矩设备的操作量)。更详细而言,通过这样的Temxr和Temnr,能确定在某时间步骤中指示了发动机转矩Te时在接下来的时间步骤中能够达到的发动机转矩范围。此外,可达到转矩相当于本发明涉及的“可达到操作量”的一个例子。
式(10)中的Temx为发动机转矩Te的上限制约值,其下限制约值的一个例子为零。式(10)中的Temx和零相当于用于保证内燃机20的工作(防止故障)的发动机转矩Te的上下限值。此外,式(10)中的下限值也可以代替零而为任意的负值。式(11)中的Tgmn和Tgmx分别为MG1转矩Tg的下限制约值和上限制约值。式(12)中的Tmmn和Tmmx分别为MG2转矩Tm的下限制约值和上限制约值。这些Tgmn、Tgmx、Tmmn以及Tmmx也分别相当于用于保证MG1和MG2的工作(防止故障)的MG1转矩Tg和MG2转矩Tm的上下限值。根据上述式(9)~(12),表示了各个操作量(Te、Tg、Tm)的制约范围。另外,式(13)表示了各状态量相对于目标值的不足量y
如上述那样,在制约内根据优先级P
(操作量上下限算出部)
图2所示的操作量上下限算出部62算出由式(9)表示的内燃机20的可达到转矩的最大值和最小值来作为上限制约值Temxr和下限制约值Temnr。更详细而言,操作量上下限算出部62在后述的步骤S104的处理中,基于当前的时间步骤中的发动机转速Ne和推定转矩Teest,算出上限制约值Temxr和下限制约值Temnr。此外,在本实施方式中,发动机转速Ne和推定转矩Teest相当于本发明涉及的“第2转矩设备的转速和推定操作量”的一个例子。
(向等式标准形式的线性规划问题的等价变换的例子)
以下的式(14)~(31)是为了仅用等式条件(式(14)~(29))和变量的非负条件(式(30)、(31))表现上述的制约条件(式(3)~(12))而通过对该制约条件的各式添加新的变量x
c
c
c
c
c
c
c
c
c
x
x
x
x
x
x
x
x
x
y
通过这样对各式进行变形,成为能够用等式标准形式(即,目标函数(评价函数)为线性函数、制约条件仅成为等式条件和非负条件的形式)对上述的线性规划问题F进行记述。这样记述的线性规划问题F能够如以下参照图4说明的那样例如使用单形法(单纯形法(Simplex method))来求解。此外,作为线性规划问题F的解法,也可以使用公知的其他任意的解法(例如内点法)。
1-2-2.通过控制装置进行的处理
图4是表示本发明的实施方式1涉及的与转矩设备控制有关的处理的例程的流程图。本例程在传动系统10启动期间中以预定的控制周期反复执行。更详细而言,本实施方式的“操作量决定部58”执行以下的步骤S100、S106、S108、S112~S118的处理,“转矩设备控制部60”执行步骤S110的处理。另外,“操作量上下限算出部62”执行步骤S102以及S104的处理。
在图4所示的例程中,控制装置50首先在步骤S100中取得目标状态量(g
在步骤S102中,控制装置50例如通过已经描述过的方法,取得(算出)当前(本次的时间步骤)的发动机转速Ne和推定转矩Teest。然后,处理进入步骤S104。
在步骤S104中,控制装置50算出在接下来的时间步骤中能够达到的发动机转矩Te的最大值和最小值来作为上限制约值Temxr和下限制约值Temnr。图5的(A)表示确定了当前的发动机转速Ne以及推定转矩Teest与上限制约值Temxr的关系的映射,图5的(B)表示确定了当前的发动机转速Ne以及推定转矩Teest与下限制约值Temnr的关系的映射。控制装置50存储这些映射。在本步骤S104中,控制装置50根据这些映射,基于当前的发动机转速Ne和推定转矩Teest,算出上限制约值Temxr和下限制约值Temnr。
图5的(A)和5的(B)所示的映射的关系能够基于事先进行了的实验结果来设定。另外,该映射的关系也可以利用事先通过任意的方法进行了的机器学习的结果来决定。此外,为了算出上限制约值Temxr,控制装置50具备的关系信息也可以代替映射而例如为确定了当前的发动机转速Ne以及推定转矩Teest与上限制约值Temxr的关系的关系式。这关于下限制约值Temnr也是同样的。
接着步骤S104,处理进入步骤S106。在步骤S106中,控制装置50通过对由式(1)表示的联立方程式代入在步骤S100中取得的目标状态量,对该联立方程式进行求解,从而算出实现目标状态量(换言之,与目标状态量对应)的操作量(Te、Tg、Tm)。关于这样的操作量(Te、Tg、Tm)的算出,相当于决定最大限度地实现目标状态量的操作量的例子。然后,处理进入步骤S108。
在步骤S108中,控制装置50判定在步骤S100中取得的各目标状态量和在步骤S106中算出的各操作量是否处于制约范围内(即,各个制约值(通过步骤S100和S106取得的值)的范围内)。更详细而言,在本步骤S108中,按照数学的方法判定是否上述联立方程式具有唯一解、且该解处于制约值的范围内。
在步骤S108的判定结果为肯定的情况下,处理进入步骤S110。在步骤S110中,控制装置50按照在步骤S106中算出(决定)的操作量,对各转矩设备(内燃机20、MG1以及MG2)进行控制。然后,本次的处理循环结束。
另一方面,在步骤S108的判定结果为否定的情况下,控制装置50为了搜索并决定在制约内最大限度地实现目标状态量的操作量(即,操作量的最佳解),执行步骤S112~S118的处理。具体而言,首先为了得到成为本例程的对象的线性规划问题F的原始基本解,处理进入步骤S112。
在步骤S112中,控制装置50判定状态量和操作量的上下限制约值(Tpmn、Tpmx、Win、Wout、dNgmn、dNgmx、Temxr、Temnr、Temx、Tgmn、Tgmx、Tmmn、Tmmx)的符号和与这些对应的松弛变量x
在步骤S112的判定结果为肯定的情况下,处理进入步骤S114。在步骤S114中,控制装置50通过以下说明的方法,设定各变量x
即,如以下的式(32)~(34)所示,变量x
在g
在g
关于g
最小化
制约条件
t
t
t
t
t
t
t
t
t
t
t
t
t
t
t
t
x
x
y
t
更详细而言,t
在通过步骤S114或者S116的处理取得了原始基本解之后,处理进入步骤S118。在步骤S118中,控制装置50在制约条件(参照式(13)~(31))的范围内根据优先级P
图6是用于对在考虑优先级P
成为在凸多面体的某一顶点处得到操作量的最佳解。在利用单形法来作为一个例子的本算法中,追寻着凸多面体的各顶点来搜索最佳解。并且,在本实施方式中,作为优先级P
图6中的顶点A1对应于原始基本解。最佳解的搜索从该顶点A1开始。在本实施方式的例中优先顺位最高的目标状态量为驱动转矩Tp的目标值g
在本算法中,接着,搜索在使优先顺位最高的驱动转矩Tp的背离量(y
在得到了顶点A4之后,同样地,进行在使驱动转矩Tp的背离量(y
根据本算法,上述的顶点A5的操作量的值被决定为最佳解。根据利用这样的算法的本实施方式的操作量决定部58,能够通过对线性规划问题F进行求解来决定在满足制约条件的范围内按从优先顺位最高开始的顺序最大限度地实现目标状态量的转矩设备的操作量。
本例程的处理在步骤S118之后进入步骤S110。其结果,按照通过步骤S118的处理决定的操作量(Te、Tg、Tm;最佳解),控制各转矩设备。
1-3.效果
根据以上说明过的本实施方式的转矩设备控制,通过操作量决定部58执行如下处理:基于对被进行控制的状态量(控制量)与转矩设备的操作量的关系进行规定的线性的状态方程式,通过对上述的线性规划问题F求解来决定最佳操作量。由此,能够决定转矩设备的操作量以使得在满足制约条件的同时最大限度地实现目标状态量,能够按照所决定的操作量来控制转矩设备。
并且,根据本实施方式的转矩设备控制,传动系统10的驱动系统中的状态量(控制量)与操作量的关系由线性的状态方程式来表现。传动系统的驱动系统的状态方程式不依赖于系统结构地成为线性的状态方程式。因此,仅通过适当地变更被代入到状态方程式的状态量和操作量的内容和数量,就能构建能够容易地应用于具备任意的第1转矩设备和第2转矩设备的其他传动系统的通用性高的控制构造(控制平台)。换言之,能够提供不改变控制构造、就能应用于其他结构的传动系统(例如参照后述的实施方式3~7)的转矩设备控制。
另外,本实施方式的传动系统10具备的多个转矩设备中,内燃机20(第2转矩设备)的输出的响应延迟比MG1以及MG2(第1转矩设备)大。在此,对于利用了线性规划法的各转矩设备的最佳操作量的决定,当不进行特别的注意时,不考虑转矩设备的输出的响应延迟。然而,在包括这样在响应性存在差异的第1转矩设备和第2转矩设备的传动系统中,为了同时使全部的转矩设备的操作量最佳化,希望能够在考虑第2转矩设备的响应延迟的同时决定各转矩设备的最佳操作量。并且,希望在抑制控制装置的运算量(计算负荷)的增加同时实现那样的最佳操作量的决定。
关于上述问题,根据本实施方式的转矩设备控制,传动系统10的制约条件包括与基于当前的时间步骤中的发动机转速Ne和推定转矩Teest算出的可达到发动机转矩Te有关的上限制约值Temxr和下限制约值Temnr。根据这样的方法,操作量决定部58能够在选择在接下来的时间步骤中能够达到的发动机转矩范围(即下限制约值Temnr~上限制约值Temxr的范围)内的操作量(Te)的同时,使全部的操作量(Te、Tg、Tm)最佳化。即,能够在考虑内燃机20的响应延迟的同时,仅通过进行一次的最佳操作量的搜索来使全部操作量最佳化。
如上所述,根据本实施方式的转矩设备控制,即使包括如内燃机20那样的响应延迟比其他转矩设备大的转矩设备,也能够在抑制用于全部操作量的最佳化的运算量(计算负荷)的增加的同时,利用线性规划法以使得能决定全部转矩设备的适当的操作量。
进而,在如本实施方式的转矩设备控制那样利用多个目标状态量的例子中,希望能够也考虑多个目标状态量间的优先级的不同来决定最佳操作量。关于这一点,根据本实施方式的操作量决定部58,通过在满足制约条件的范围内对线性规划问题F进行求解,决定按优先顺位从高到低的顺序最大限度地实现多个目标状态量的各个目标状态量的操作量。因此,通过利用操作量决定部58,能够不改变控制构造地决定与目标状态量的优先级相应的操作量。另外,根据操作量决定部58,通过在多个目标状态量间适当地变更优先级(优先顺位)的高低,能够决定各操作量以使得最大限度地实现任意的目标状态量。补充来说,根据通过线性的状态方程式表现各控制量(状态量)与各操作量的关系的本实施方式,各操作量对于各控制量的影响被以多轴的方式进行处理。
关于考虑了优先顺位的操作量的决定,以下补充地进行说明。图7是用于对与有无设定优先顺位相应的操作量的决定方法的不同进行说明的概念图。在图7中,为了使说明容易理解,使用了两个目标状态量A、B和两个操作量X1、X2的例子。
在操作量为两个的例子中,满足制约条件的区域如图7所示那样由多边形表示。图7中的直线L1相当于满足目标状态量A的直线(状态方程式),直线L2相当于满足目标状态量B的直线(状态方程式)。因此,这些直线L1、L2的交点C1相当于满足目标状态量A和B这两方的点。
如图7所示,交点C1处于满足制约条件的区域外。顶点C2相当于图7所示的多边形的顶点中的相对于目标状态量A(直线L1)的背离量最小的顶点。并且,在顶点C2处,相对于目标状态量A的背离量(相对于直线L1的距离)D1比相对于目标状态量B的背离量D2小。在另一个顶点C3处,与顶点C2相反地,相对于目标状态量B的背离量D3比相对于目标状态量A的背离量D4小。另外,作为相对于交点C1的距离,顶点C3的距离D5比顶点C2的距离D6短。
在此,在图7所示的制约条件下目标状态量A的优先顺位高于了目标状态量B的优先顺位的例子中,作为一个例子,当利用单形法来进行通过操作量决定部58实现的处理时,结果成为如下那样。即,顶点C2的操作量X1、X2的值被决定为最佳解。其理由是由于:对于相对于交点C1的距离,顶点C2的距离D6比顶点C3的距离D5长,但对于与优先顺位最高的目标状态量A的直线L1的距离,顶点C2的距离D1比从其他5个顶点(包括顶点C3)到直线L1的任何距离都短。另一方面,在不考虑优先顺位而例如通过单形法进行了搜索的情况下,认为相对于交点C1的距离相对短的顶点C3的操作量X1、X2的值会被决定为最佳解。
另一方面,若是与上述的例子相反地目标状态量B的优先顺位相对地高的例子,则认为会与优先顺位的有无无关地为了决定最佳解而选择顶点C3。
如根据以上的说明可知那样,根据能够也考虑优先顺位来搜索最佳解的本实施方式的操作量决定部58,能够与制约条件的各顶点和满足各目标状态量的直线的位置关系无关而切实地选择按从优先顺位最高开始的顺序最大限度地实现目标状态量的操作量。
1-4.与优先级有关的其他具体的利用例
在上述实施方式1中,作为优先级P
具体而言,在权重的例子中,优先级越高,优先级P
2.实施方式2
接着,参照图8~图10对本发明的实施方式2进行说明。
2-1.传动系统的构成例
实施方式2涉及的传动系统除了代替控制装置50而具备图8所示的控制装置70这一点以外,与实施方式1涉及的传动系统10是同样的。
2-2.实施方式2涉及的转矩设备控制
图8是表示本发明的实施方式2涉及的与转矩设备控制关联的控制装置70的功能构成的框图。控制装置70在以下说明的点与实施方式1的控制装置50不同。即,控制装置70为了进行转矩设备控制,除了“转矩设备控制部60”和“操作量上下限算出部62”之外,还具备“操作量决定部72”。操作量决定部72由具有与图2所示的操作量决定部58相同的功能的操作量运算部72a和操作量修正部72b构成。
图9是用于对操作量修正部72b的概要进行说明的曲线图。为了便于说明,将通过上述的图4所示的例程的步骤S106或者S118的处理决定的内燃机20的操作量(Te)称为“修正前的指示转矩Tereq”。该指示转矩Tereq相当于本发明涉及的“通过求解线性规划问题来决定的第2操作量的决定值”的一个例子。
如参照图3已经描述过的那样,内燃机20的输出存在响应延迟。因此,在当前的时间步骤中操作量决定部72对转矩设备控制部60指示了指示转矩Tereq的情况下,如图9所示的发动机转矩Te1的例子那样,有时在接下来的时间步骤中无法实现指示转矩Tereq。关于这一点,在图9中进一步表示了等于指示转矩Tereq的发动机转矩Te1’和在接下来的时间步骤中实现该发动机转矩Te1’的修正后指示转矩Tereq’。根据图9可知:若能够在如修正后指示转矩Tereq’那样对指示转矩Tereq进行了修正之后对转矩设备控制部60进行指示,则能够在接下来的时间步骤中实现修正前的指示转矩Tereq(=Te1’)。
鉴于上述问题,操作量修正部72b通过按照内燃机20的响应延迟特性的逆特性对指示转矩Tereq进行修正,算出在接下来的时间步骤中实现(修正前的)指示转矩Tereq的修正后指示转矩Tereq’。在那之后,操作量决定部72将所算出的修正后指示转矩Tereq’输出至转矩设备控制部60。此外,在此,参照图9对提高内燃机20的操作量(即发动机转矩Te)的例子进行了说明,但关于降低发动机转矩Te的情况也可以说是同样的。此外,修正后指示转矩Tereq’相当于本发明涉及的“修正后第2操作量”的一个例子。
2-2-1.通过控制装置进行的处理
图10是表示本发明的实施方式2涉及的与转矩设备控制有关的处理的例程的流程图。此外,关于图10所示的例程中的步骤S100~S108以及S112~S118的处理是如在实施方式1中已经描述的那样。
在图10所示的例程中,在步骤S106或者步骤S118之后,处理进入步骤S200。在步骤S200中,控制装置70(操作量修正部72b)对通过步骤S106或者S118的处理决定的操作量Te(即指示转矩Tereq)进行修正,由此算出修正后指示转矩Tereq’。修正后指示转矩Tereq’的算出例如可以使用如下那样的方法来进行。
修正后指示转矩Tereq’相当于被输出至转矩设备控制部60的发动机转矩指示值。该指示转矩Tereq’使用以下的式(36)来算出。在式(36)中,τau是发动机转矩Te的响应时常数,作为反映了内燃机20的输出(Te)的响应延迟特性的值,事先通过实验等来决定。τs为预定的控制周期(两个时间步骤的间隔)。Tereqsm是操作量运算部72a的输出(即指示转矩Tereq)的一个例子,更详细而言,是实施了预定的平滑化处理后的操作量运算部72a的输出。
基于式(36)的修正后指示转矩Tereq’的算出相当于进行发动机模型的逆模型运算,该发动机模型是将发动机转矩Te的响应延迟作为一次延迟进行了模拟的模型。根据式(36),能够算出为了在接下来的时间步骤中实现指示转矩Tereq所需要的修正后指示转矩Tereq’。
在本步骤S200中算出的修正后指示转矩Tereq’被输出至转矩设备控制部60。此外,被输出至转矩设备控制部60的指示转矩Tereq’的值被进行限制以使得不超出在当前的时间步骤中的发动机运转条件下内燃机20能够产生的最大转矩和最小转矩。补充来说,在此所说的最大转矩相当于在当前的时间步骤中的发动机转速Ne下使节气门22为全开时能够产生的发动机转矩Te,最小转矩相当于在该发动机转速Ne下使节气门22为全闭、且执行了燃料切断时能够产生的发动机转矩Te(负转矩)。
接着步骤S200,处理进入步骤S202。在步骤S202中,控制装置70关于MG1和MG2的操作量(Tg、Tm),与实施方式1的图4所示的例程同样地,按照在步骤S106或者步骤S118的处理中决定的操作量来对第1转矩设备(MG1和MG2)进行控制。另一方面,关于内燃机20的操作量(Te),控制装置70按照通过步骤S200的处理算出(决定)的修正后指示转矩Tereq’,对第2转矩设备(内燃机20)进行控制。
2-3.效果
如以上说明的那样,本实施方式的操作量决定部72具备上述的操作量修正部72b。由此,与不具备操作量修正部72b的实施方式1相比,能够在接下来的时间步骤中更切实地实现操作量运算部72a所决定的第2转矩设备(内燃机20)的最佳操作量(即指示转矩Tereq)。
3.实施方式3
接着,参照图11对本发明的实施方式3进行说明。图11是用于对本发明的实施方式3涉及的传动系统80的构成例进行说明的示意图。图11所示的传动系统80具备内燃机20和有级式的自动变速器82。自动变速器82内置有油压驱动式的多个离合器82a,构成为通过对这些离合器82a的接合/分离进行控制来对挡位进行切换。各离合器82a具有与油压相应的传递转矩容量(以下简称为“转矩容量”)。更详细而言,将在自动变速器82的变速时成为分离侧的离合器的转矩容量称为Tcr(Nm),将在变速时成为接合侧的离合器的转矩容量称为Tce(Nm)。
自动变速器82一边进行变速,一边将发动机转矩Te传递至车轮38。这样,“传递转矩”自动变速器82与“产生转矩”的内燃机20一起相当于本发明涉及的“与车辆的驱动力的控制有关系”的转矩设备的例子。并且,在本实施方式中,内燃机20与实施方式1、2不同,相当于“第1转矩设备”。自动变速器82相当于输出的响应延迟比第1转矩设备(内燃机20)大的“第2转矩设备”。
内燃机20和自动变速器82由具有与图2所示的控制装置50同样的结构的控制装置84进行控制。在控制装置84电连接有包括对自动变速器82的输入轴(AT输入轴)82b的转速Nat进行检测的转速传感器等的与内燃机20和自动变速器82的控制有关的各种传感器的传感器类86。以下,对通过控制装置84进行的转矩设备控制与通过控制装置50进行的转矩设备控制的不同点进行说明。
首先,对本实施方式的控制装置84涉及的使用了线性计划法的操作量的决定中所使用的线性的状态方程式进行说明。如以下的式(37)所示那样,通常时(非变速时)所使用的状态量为驱动转矩Tp,操作量为发动机转矩Te。另一方面,如以下的式(38)所示那样,变速时所使用的控制量为自动变速器82的输出轴82c的转矩(AT输出轴转矩)To和AT输入轴82b的角加速度dωin/dt。更详细而言,AT输入轴82b是指转矩转换器82d的输出轴(涡轮的旋转轴)。另外,与发动机转矩Te一起,操作量是分离侧和接合侧的转矩容量Tcr、Tce。此外,如在实施方式1中说明过的那样,式(37)和(38)中的c(c
通常时:Tp=c11·Te…(37)
变速时:
接着,为了在变速时在控制装置84的操作量决定部中决定操作量所使用的线性规划问题的目标函数(评价函数)f2可以如以下式(39)那样进行表示。
最小化f2=P
y
y
y
y
P
P
本实施方式的线性规划问题的制约条件的一个例子可以按照与实施方式1同样的想法来如以下的各式那样进行表示。此外,能够与实施方式1同样地进行用于通过等式标准形式记述以下各式的式的变形,因此,在此省略其说明。
c
c
Tomn≤c
Tcrmnr≤x
Tcemnr≤x
0≤x
Tcrmn≤x
Tcemn≤x
y
x
x
x
g
g
Tomn:发动机转矩Te的下限制约值(保证驱动力)
Tomx:发动机转矩Te的上限制约值(保证驱动力)
dωin/dtmn:AT输入轴82b的角加速度的下限制约值(保证转速)
dωin/dtmx:AT输入轴82b的角加速度的上限制约值(保证转速)
Tcrmnr:与能够达到的转矩容量有关的下限制约值
Tcrmxr:与能够达到的转矩容量有关的上限制约值
Tcemnr:与能够达到的转矩容量有关的下限制约值
Tcemxr:与能够达到的转矩容量有关的上限制约值
Temn:发动机转矩Te的下限制约值(保证内燃机20的工作)
Temx:发动机转矩Te的上限制约值(保证内燃机20的工作)
Tcrmn:转矩容量Tcr的下限制约值(保证自动变速器82的工作)
Tcrmx:转矩容量Tcr的上限制约值(保证自动变速器82的工作)
Tcemn:转矩容量Tce的下限制约值(保证自动变速器82的工作)
Tcemx:转矩容量Tce的上限制约值(保证自动变速器82的工作)
利用油压的自动变速器82的变速动作存在响应延迟,因此,在本实施方式中,自动变速器82相当于“第2转矩设备”。在此基础上,如上述的那样,本实施方式中所使用的制约条件包括与可达到转矩容量有关的上下限制约值Tcrmnr、Tcrmxr、Tcemnr、Tcemxr。根据这些上下限制约值Tcrmnr等,确定在变速时(变速动作中)的某时间步骤中指示了转矩容量Tcr、Tce时在接下来的时间步骤中能够达到的转矩容量范围。此外,可达到转矩容量相当于本发明涉及的“可达到操作量”的其他例子。
控制装置84具备的操作量上下限算出部例如使用如下那样的方法来算出与可达到转矩容量有关的上下限制约值Tcrmnr、Tcrmxr、Tcemnr、Tcemxr。即,控制装置84存储有个别地确定了相对于当前的AT输入轴82b的转速Nat以及推定转矩容量Tcrest的、上下限制约值Tcrmnr以及Tcrmxr各自的关系的关系信息(例如省略图示的映射)。控制装置84根据这些映射,算出与当前的AT输入轴82b的转速Nat以及推定转矩容量Tcrest相应的上下限制约值Tcrmnr以及Tcrmxr。同样地,控制装置84存储有个别地确定了相对于当前的转速Nat以及推定转矩容量Tceest的、上下限制约值Tcemnr以及Tcemxr各自的关系的关系信息(例如省略图示的映射)。控制装置84根据这些映射,算出与当前的AT输入轴82b的转速Nat和推定转矩容量Tceest相应的上下限制约值Tcemnr和Tcemxr。
当前的AT输入轴82b的转速Nat例如使用传感器类86所包括的转速传感器来取得。当前的推定转矩容量Tcrest例如能够使用确定了推定转矩容量Tcrest相对于AT输入轴82b的转速Nat以及推定输入转矩Tatin的关系的关系信息(例如省略图示的映射)来算出。另外,关于当前的推定转矩容量Tceest,也能够通过同样的方法来算出。此外,推定输入转矩Tatin是被输入到AT输入轴82b的转矩,例如能够基于加速器开度等的预定参数,通过公知的任意方法来算出。
此外,在本实施方式中,AT输入轴82b的转速Nat和推定转矩容量Tcrest、Tceest相当于本发明涉及的“第2转矩设备的转速和推定操作量”的一个例子。
如以上说明的那样,本实施方式的线性规划问题的制约条件包括与可达到转矩容量有关的上下限制约值Tcrmnr等。因此,根据本实施方式的转矩设备控制,能将具备自动变速器82来作为响应延迟相对地大的第2转矩设备的传动系统80作为对象,与实施方式1同样地得到如以下那样的效果。即,能够在对用于全部操作量的最佳化的运算量(计算负荷)的增加进行抑制的同时,考虑变速时的自动变速器82的响应延迟来决定全部转矩设备的适当的操作量。另外,能实现与实施方式1同样的效果。
补充来说,本实施方式的控制装置84也可以追加性地具备与实施方式2的控制装置70(参照图8)的操作量修正部72b同样的操作量修正部。
4.实施方式4
接着,参照图12对本发明的实施方式4进行说明。图12是用于对本发明的实施方式4涉及的传动系统90的构成例进行说明的示意图。与内燃机20一起,图12所示的传动系统90还具备发电机92和电动机94。在该例子中,与实施方式1同样地,发电机92和电动机94相当于“第1转矩设备”,内燃机20相当于“第2转矩设备”。
另外,传动系统90具备对这些第1转矩设备和第2转矩设备进行控制的控制装置96。发电机92通过由控制装置96进行的变换器98的控制,进行使用了发动机转矩Te的发电。由发电机92生成的电力被蓄积于电池100。电动机94通过由控制装置96进行的变换器98的控制,利用蓄积于电池100的电力对车轮38进行驱动。这样,传动系统90是所谓的串联方式的混合动力系统。补充来说,在图12所示的例子中,内燃机20和发电机92并不直接地产生车辆的驱动力。然而,通过发电机92吸收内燃机20所产生的转矩,生成车辆的驱动中所使用的电力,因此,该例子中的内燃机20和发电机92也相当于“与车辆的驱动力的控制有关系”的转矩设备的例子。
与传动系统10同样地,由传动系统90控制的状态量(控制量)的一个例子为驱动转矩Tp、充放电量Pchg以及转速变化率dNg。并且,关于本实施方式的转矩设备的操作量,也与传动系统10同样地是发动机转矩Te、发电机92的转矩Tg以及电动机94的转矩Tm。关于在本实施方式中使用的控制量与操作量的关系,如以下的式(40)所示那样,能够用线性的状态方程式表示。
也可以将上述的传动系统90作为对象,利用式(40)所示的状态方程式和线性计划法,执行与实施方式1或者2同样的转矩设备控制。此外,目标函数基于与式(2)同样的想法来决定即可。关于制约条件,按照与实施方式1同样的想法,包括与能够达到的发动机转矩Te有关的上限制约值Temxr和下限制约值Temnr,并且,对状态量和操作量分别适当地进行设定即可。
5.实施方式5
接着,参照图13对本发明的实施方式5进行说明。图13是用于对本发明的实施方式5涉及的传动系统110的构成例进行说明的示意图。在图13所示的传动系统110中,并联连结有与有级式的自动变速器82组合的内燃机20和电动发电机114。在该例子中,与实施方式1同样地,电动发电机114相当于“第1转矩设备”,内燃机20和自动变速器82相当于“第2转矩设备”。即,在该例子中,第2转矩设备为多个。
更详细而言,车轮38能够通过经由自动变速器82从内燃机20传递来的转矩和电动发电机114的转矩Tmg进行驱动。从电池118供给产生电动发电机转矩Tmg所需要的电力。电动发电机114通过由控制各转矩设备的控制装置116进行的变换器120的控制,进行使用了内燃机20的发电以及车辆减速时的再生发电。作为其结果所生成的电力被蓄积于电池118。这样,传动系统110是所谓的并联方式的混合动力系统。
接着,对通过控制装置116使用了线性计划法的操作量的决定中所使用的线性的状态方程式进行说明。如以下说明的那样,由传动系统110控制的状态量(控制量)和操作量的一个例子在通常时(非变速时)和变速时成为不同。
具体而言,如以下的式(41)所示那样,在通常时(非变速时)所使用的状态量为驱动转矩Tp和充放电量Pchg,操作量为发动机转矩Te和电动发电机转矩Tmg。此外,当挡位被变更时,以下的式(41)、(42)中的c(c
通常时:
另一方面,如以下的式(42)所示的那样,除了驱动转矩Tp和充放电量Pchg之外,变速时所使用的状态量还包括转速变化率dω。转速变化率dω的一个例子为发动机转速变化率dNe,或者,也可以代替于此而为自动变速器82的输入轴的转速变化率。另外,除了发动机转矩Te和电动发电机转矩Tmg之外,操作量还包括Tcr和Tce。Tcr是自动变速器82的上述多个离合器82a中的在变速时成为分离侧的离合器的转矩容量。Tce是在变速时成为接合侧的离合器的转矩容量。
变速时:
也可以将上述的传动系统110作为对象,利用式(41)和(42)所示的状态方程式和线性计划法,执行与实施方式1或者2同样的转矩设备控制。基于与实施方式1同样的想法,与作为第2转矩设备之一的内燃机20有关的制约条件包括与能够达到的发动机转矩Te有关的上限制约值Temxr和下限制约值Temnr。另外,基于与实施方式3同样的想法,与作为另一个第2转矩设备的自动变速器82有关的制约条件包括与可达到转矩容量有关的上下限制约值Tcrmnr、Tcrmxr、Tcemnr、Tcemxr。
6.实施方式6
接着,参照图14对本发明的实施方式6进行说明。图14是用于对本发明的实施方式6涉及的传动系统130的构成例进行说明的示意图。与传动系统10同样地,图14所示的传动系统130具备的转矩设备是内燃机20(第2转矩设备)、MG1以及MG2(第1转矩设备)。传动系统130在动力分割机构132的构成上与传动系统10不同。动力分割机构132包括第1行星齿轮单元134、第2行星齿轮单元136、低速用离合器138、高速用离合器140以及减速机构142。控制装置144对上述转矩设备进行控制。此外,在图14中,省略了变换器和电池的图示。
更详细而言,第1行星齿轮单元134包括第1太阳轮134a(S1)、第1行星架134b(C1)以及第1齿圈134c(R1)。第2行星齿轮单元136包括第2太阳轮136a(S2)、第2行星架136b(C2)以及第2齿圈136c(R2)。第1太阳轮134a连结于MG1,第1行星架134b连结于内燃机20。与图1所示的动力分割机构34不同,第1齿圈134c连结于第2太阳轮136a,能与此以一体的方式自由旋转。
低速用离合器138构成为能够将第2太阳轮136a与第2行星架136b连结。高速用离合器140构成为能够将第2行星架136b与第2齿圈136c连结。这些离合器138、140的一个例子为爪形离合器。第2齿圈136c连结于减速机构142。另外,MG2也连结于减速机构142。减速机构142构成为使MG2的旋转相对于第2齿圈136c的输出轴的旋转进行减速。来自第2齿圈136c的转矩和MG2转矩Tm经由减速机构142和减速机构36而被传递至车轮38。如上所述,与传动系统10同样地,传动系统130是动力分割方式的混合动力系统。
根据上述的传动系统130,能够通过对离合器138、140的接合/分离进行控制来进行变速。具体而言,当低速用离合器138接合时,第2太阳轮136a和第2行星架136b成为能够以一体的方式进行旋转,另一方面,当高速用离合器140接合时,第2行星架136b和第2齿圈136c成为能够以一体的方式进行旋转。第2行星齿轮单元136构成为在高速用离合器140接合、且低速用离合器138分离的情况下(高速模式),与低速用离合器138接合、且高速用离合器140分离的情况(低速模式)相比而进行增速(选定各齿轮比)。
接着,对通过控制装置144使用了线性计划法的操作量的决定中所使用的线性的状态方程式进行说明。关于由本传动系统130控制的状态量(控制量)和操作量,如以下所示的一个例子那样,在通常时(非变速时)和变速时不同。
具体而言,如以下的式(43)所示那样,与传动系统10同样地,通常时(非变速时)所使用的控制量为驱动转矩Tp、充放电量Pchg以及MG1转速变化率dNg,操作量为发动机转矩Te、MG1转矩Tg以及MG2转矩Tm。
通常时:
另一方面,如以下的式(44)所示那样,除了驱动转矩Tp、充放电量Pchg以及MG1转速变化率dNg之外,变速时所使用的控制量还包括Txl和Txh。Txl为选择了低速模式时低速用离合器138需要担负的传递转矩(分担转矩),Txh为选择了高速模式时高速用离合器140需要担负的传递转矩(分担转矩)。操作量与通常时的操作量相同。
变速时:
补充来说,在式(44)所示的变速时的例子中,控制量的数量为5个,操作量的数量为3个。即使是这样控制量的数量比操作量的数量多的例子,也能够在对5个控制量的全部标记优先顺位的同时以数学的方式求解线性规划问题。因此,也可以如式(44)那样设为对使用5个状态量的全部来作为目标状态量的线性规划问题进行求解。另一方面,能够明确地(直接地)控制的控制量的数量为与操作量的数量相同的3个。于是,也可以设为:在将第4、5优先顺位的控制量从式(44)排除掉之后(即在使控制量的数量和操作量的数量一致之后),对线性规划问题进行求解。其结果,能够在降低运算负荷的同时决定最佳操作量。这关于接下来的实施方式7的变速时的线性规划问题的例子(参照式(46))也是同样的。
也可以将上述的传动系统130作为对象,利用式(43)和(44)所示的状态方程式和线性计划法,执行与实施方式1或者2同样的转矩设备控制。基于与实施方式1同样的想法,与内燃机20有关的制约条件包括与能够达到的发动机转矩Te有关的上限制约值Temxr和下限制约值Temnr。
7.实施方式7
接着,参照图15对本发明的实施方式7进行说明。图15是用于对本发明的实施方式7涉及的传动系统150的构成例进行说明的示意图。图15所示的传动系统150具备内燃机20、MG1、MG2以及自动变速器82来作为由控制装置152控制的转矩设备。此外,在图15中,变换器的图示被省略。在该例子中,MG1和MG2相当于“第1转矩设备”,内燃机20和自动变速器82相当于“第2转矩设备”。
更详细而言,MG1配置在内燃机20与自动变速器82之间。自动变速器82的输出轴经由差动齿轮154与后轮156连结。后轮156能够由内燃机20进行驱动。另外,后轮156也能够由作为电动机发挥功能的MG1进行驱动。MG1也能够作为发电机发挥功能,进行使用了内燃机20的发电以及车辆减速时的再生发电。另一方面,MG2经由减速机构158以及差动齿轮160与前轮162连结。在减速机构158与差动齿轮160之间配置有爪形离合器164。MG2能够在作为电动机发挥了功能时对前轮162进行驱动,也能够在车辆减速时作为发电机发挥功能来进行再生发电。电池118从作为发电机发挥功能的MG1和MG2接受电力的供给,对作为电动机发挥功能的MG1和MG2供给电力。这样,传动系统150是所谓的混联(series-parallel)方式的混合动力系统。
接着,对通过控制装置152使用了线性计划法的操作量的决定中所使用的线性的状态方程式进行说明。关于由本传动系统150控制的状态量(控制量)和操作量,如以下所示的一个例子那样,在通常时(非变速时)和伴随着离合器操作的变速时为不同。
具体而言,如以下的式(45)所示那样,通常时(非变速时)所使用的控制量为前轮162的驱动转矩Tpf、后轮156的驱动转矩Tpr以及充放电量Pchg。操作量为发动机转矩Te、MG1转矩Tmg1以及MG2转矩Tmg2。
通常时:
另一方面,如以下的式(46)所示那样,除了驱动转矩Tpf、Tpr以及充放电量Pchg之外,伴随着离合器操作的变速时所使用的控制量还包括MG1转速变化率dNg、MG2转速变化率dNm以及Tx。Tx是爪形离合器164需要担负的传递转矩(分担转矩)。另外,除了发动机转矩Te、MG1转矩Tmg1以及MG2转矩Tmg2之外,操作量还包括自动变速器82的各转矩容量Tcr和Tce。
变速时:
也可以将上述的传动系统150作为对象,利用式(45)和(46)所示的状态方程式和线性计划法,执行与实施方式1或者2同样的转矩设备控制。基于与实施方式1同样的想法,与作为第2转矩设备之一的内燃机20有关的制约条件包括与能够达到的发动机转矩Te有关的上限制约值Temxr和下限制约值Temnr。另外,基于与实施方式3同样的想法,与作为另一个第2转矩设备的自动变速器82有关的制约条件包括与可达到转矩容量有关的上下限制约值Tcrmnr、Tcrmxr、Tcemnr、Tcemxr。
8.实施方式8
接着,对本发明的实施方式8进行说明。
8-1.实施方式1~7涉及的传动系统的问题
在实施方式1(实施方式2~7也是同样的)中,在一边使各控制量(Tp、Pchg、dNg)从目标值的背离最小化(参照式(2))、一边算出操作量(Te、Tg、Tm)时,要求总是遵守与各控制量的上下限有关的制约条件(参照式(6)~(8))。其结果,有可能引起如下状况:无论使各操作量在满足其制约条件(参照式(9)~(12))的范围内如何移动,都无法遵守与控制量的上下限有关的制约条件。在这样在算出操作量时无法遵守与控制量的上下限有关的制约条件的情况下,成为线性规划问题F没有解(可行解)的状态。因此,求解线性规划问题F的最佳操作量搜索器(在实施方式1的例子为操作量决定部58)成为无法决定操作量。
8-2.实施方式8涉及的目标函数和制约条件的设定例
实施方式8涉及的传动系统在以下说明的点上与实施方式1涉及的传动系统10不同。具体而言,鉴于上述问题,在本实施方式中,为了决定操作量(Te、Tg、Tm)所使用的目标函数和制约条件的定式化的方法相对于实施方式1如以下那样被进行变更。
接下来的式(47)表示在本实施方式中操作量决定部58为了决定操作量所使用的线性规划问题的目标函数(评价函数)f3的一个例子。另外,以下的式(3)~(5)、(9)~(12)、(48)~(54)表示与该目标函数f3一起使用的制约条件的一个例子。
最小化f3=P
制约条件
c
c
c
c
c
c
c
c
c
Temnr≤x
0≤x
Tgmn≤x
Tmmn≤x
y
如上述那样,在本实施方式所使用的制约条件中,与各控制量(Tp、Pchg、dNg)的上下限制约值有关的式(48)~(53)相对于在实施方式1所使用的式(6)~(8)被进行了变更。并且,随着该变更,式(13)被如式(54)那样进行了变更。更详细而言,式(48)~(53)中的y
y
y
y
y
y
y
y
y
y
y
y
y
通过上述的使用y
而且,除了与式(2)的右边相同的3个项(各控制量相对于目标值的背离量的3个项)之外,本实施方式的目标函数f3还具有与各控制量相对于制约值的超过量有关的3个项。更详细而言,关于后者的3个项,2个超过量y
另外,在本实施方式中,作为一个例子,优先级P
本实施方式的目标函数f3中的优先级P
8-3.作用效果
通过利用上述的本实施方式的目标函数f3和制约条件,操作量决定部58决定操作量(Te、Tg、Tm)以使得式(47)的各项按上述的优先级P
因此,根据本实施方式,在若遵守与控制量的上下限有关的多个制约条件则无法确定操作量的情况下(更详细而言,在若遵守实施方式1的式(6)~(8)则无法确定操作量的情况下),操作量决定部58执行如下那样的处理。即,在按优先级P
(定式化的变更的意义的补充)
补充来说,根据为了根据需要来放宽制约条件而利用定式化的变更的本实施方式,由于以下说明的理由,能够避免无法决定操作量。即,在本实施方式中,通过利用式(48)~(53),控制量的上下限制约被从基于式(6)~(8)的不等式制约变更为等式制约。并且,根据这些等式制约,当以式(48)为例时,对控制量的组合(c
(控制量的超过量的最小化)
另外,在通过利用由式(47)表示的目标函数f3来放宽与各制约值有关的制约条件的情况下,如已经描述过的那样,按优先级P
(优先级的设定:P
进而,在本实施方式中,遵守控制量的各制约值时的优先级P
8-4.变形例
在实施方式8中说明过的定式化的变更方法也可以对其他的实施方式2~7涉及的传动系统进行应用。
(定式化的其他变更例)
在上述的实施方式8的式(47)中,对针对同一控制量的上下限制约值各自的超过量给与了相同的优先级P
最小化f4=P
另外,在实施方式8的式(48)~(53)所示的制约条件的例子中,各控制量的上下限制约值各自的数量分别为一个。然而,对于同一控制量的上限制约值或者下限制约值的数量也可以为2个以上。换言之,也可以对于同一上限制约值或者下限制约值设定2个以上的制约条件(制约式)。
更详细而言,例如,在对于同一控制量的上限制约值和下限制约值各自的数量为2个的例子中,也可以对2个上限制约值和2个下限制约值分别个别地给与优先级。另外,在该例子中,也可以对2个上限制约值(例如Tpmx1和Tpmx2)和2个下限制约值(例如Tpmn1和Tpmn2)中的一对上下限制约值(Tpmx1和Tpmn1)给与一个优先级,并且,对另一对上下限制约值(Tpmx2和Tpmn2)给与另一个优先级。
另外,以下的式(56)具体地例示了上述的后者的例子的优先级的给与方式。另外,式(56)所示的目标函数f5中的优先级P
最小化f5=P
如以上例示的那样,关于实施方式8涉及的定式化的变更方法,目标函数(评价函数)的形式以及优先级的给与方式和制约条件的数量(上下限制约值的数量)可以任意地进行决定。补充来说,上述的定式化的变更方法的要点在于用等式制约处理控制量的上下限制约值、而不是不等式制约,并且,在目标函数中对上下限制约值的超过量给与与优先级相应的处罚(penalty)。
9.实施方式9
接着,参照图16~图19对本发明的实施方式9及其变形例进行说明。本实施方式相当于对上述的项目8-1.所记载的问题的对策的其他例子。但是,在本实施方式中,不进行如实施方式8那样的定式化。本实施方式涉及的传动系统在追加性地进行以下说明的处理这一点上与实施方式1涉及的传动系统10不同。此外,以下说明的处理也可以对其他实施方式2~7涉及的传动系统进行应用。
9-1.概要
在本实施方式中,操作量决定部58在若遵守与控制量(Tp、Pchg、dNg)的上下限制约值有关的多个制约条件(式(6)~(8))则无法确定操作量(Te、Tg、Tm)的情况下,按优先级(更详细而言例如为优先顺位)从低到高的顺序,轮流扩大制约值。此外,在此所说的“扩大制约值”在上限制约的情况下意味着增大值,在下限制约的情况下意味着减小值。
在本实施方式中,在无论操作量(Te、Tg、Tm)如何移动、都无法遵守与控制量的制约值有关的多个制约条件的情况下,利用如上述那样的制约值的扩大,在按优先顺位从低到高的顺序放宽多个制约条件中的一个的同时决定操作量。
9-2.控制装置的处理
图16是表示本发明的实施方式9涉及的与转矩设备控制有关的处理的例程的流程图。此外,关于图16所示的例程中的S100~S114和S118的处理是如在实施方式1中已经描述过的那样。
图16所示的例程的处理在步骤S112的判定结果为否定的情况下进入步骤S300。在步骤S300中,控制装置50(操作量决定部58)通过与步骤S116同样的处理,搜索原始基本解。
接着,在步骤S302中,操作量决定部58判定是否存在原始基本解。该判定基于目标函数z(参照实施方式1的式(35))是否成为零(也即是,人为变量t
另一方面,在步骤S302的判定结果为否定的情况下(目标函数z不成为零的情况下),判定为没有原始基本解(没有满足制约条件的可行解)。然后,处理进入步骤S304。
在此,设为对控制量(Tp、Pchg、dNg)的各制约值(上下限制约值Tpmn、Tpmx、Win、Wout、dNgmn、dNgmx)分别给与了优先顺位(优先级)P
图17是表示与在步骤S304的处理中利用的制约值的扩大方法的一个例子有关的例程的流程图。在本实施方式中所使用的控制量的制约值的数量如上述那样为6个,但在此为了说明的简化,举出仅使用2个制约值A、B、且制约值A的优先顺位比制约值B高的例子来说明制约值的扩大方法。
在图17所示的例程中,操作量决定部58首先在步骤S400中使优先顺位相对地低的制约值B扩大任意的预定量。接着,在步骤S402中,操作量决定部58判定制约值B的总扩大量是否为判定值c以下。在此所说的制约值B的总扩大量例如相当于当前的制约值B相对于本例程的处理开始时的制约值B(初始值)之差。或者,该总扩大量也可以在通过后述的步骤S412的处理对判定值c进行了更新时被复位为零。
在步骤S402的判定结果为肯定的情况下(制约值B的总扩大量≤判定值c),处理进入步骤S404。在步骤S404中,操作量决定部58用通过步骤S400的处理进行的扩大后的值对制约值B进行更新。然后,结束本次的处理循环。
另一方面,在步骤S402的判定结果为否定的情况下、也即是在制约值B的总扩大量超过了判定值c的情况下(制约值B的总扩大量>判定值c),处理进入步骤S406。在步骤S406中,操作量决定部58代替制约值B而将优先顺位相对地高的制约值A扩大任意的预定量。接着,在步骤S408中,操作量决定部58判定制约值A的总扩大量是否为判定值d以下。步骤S408的判定处理是基于与步骤S402本身同样的想法的。但是,判定值d既可以与判定值c相同,也可以与判定值c不同。
在步骤S408的判定结果为肯定的情况下(制约值A的总扩大量≤判定值d),处理进入步骤S410。在步骤S410中,操作量决定部58以通过步骤S406的处理进行的扩大后的值对制约值A进行更新。然后,结束本次的处理循环。此外,关于制约值B,在这样处理进入步骤S410的情况下,不进行使用了通过步骤S400的处理进行的扩大后的值的制约值B的更新。
另一方面,在步骤S408的判定结果为否定的情况下(制约值A的总扩大量>判定值d)、也即是在不仅是制约值B的总扩大量超过判定值c、制约值A的总扩大量也超过了判定值d的情况下,处理进入步骤S412。在步骤S412中,操作量决定部58通过将判定值c、d分别扩大预定量,对这些判定值c、d进行更新。此外,判定值c和判定值d既可以被扩大相同的预定量,也可以通过相互不同的预定量进行扩大。在步骤S412的处理之后,处理进入步骤S404。即,在这样处理经由步骤S408和S412而进入到步骤S404的情况下,重新开始使用了通过步骤S400的处理进行的扩大后的值的制约值B的更新。
9-3.作用效果
根据上述的图17所示的制约值的扩大方法,首先,优先顺位相对地低的制约值B逐渐增加。在作为其结果而制约值B超过了判定值c的情况下,接着,优先顺位相对地高的制约值A逐渐增加。在作为其结果而制约值A超过了判定值d的情况下,判定值c、d被扩大。然后,制约值B再次逐渐增加,直到超过被扩大后的判定值c。以下是同样的。
如上述那样,根据本扩大方法,在步骤S302中判定为不存在原始基本解(即若遵守多个制约条件则无法确定操作量)的情况下,能够按优先顺位从低到高的顺序,轮流扩大制约值。并且,本扩大方法代替两个制约值A、B的例子,也能够对3个以上的制约值的例子进行扩展并应用。因此可知:例如通过应用本扩大方法,能够在步骤S304中将本实施方式中使用的6个制约值(Tpmn等)作为对象,按优先顺位P
如以上说明的那样,根据本实施方式,在无法遵守Tpmn等的6个制约值(即多个制约条件)的情况下,能够在按优先顺位(优先级)P
补充来说,根据图17所示的制约值的扩大方法,各制约值被按优先顺位从低到高的顺序逐渐进行扩大。因此,能够在将控制量相对于各制约值的的超过量抑制为最小限度的同时,避免成为无法决定操作量。
(制约值的变化的具体例)
接着,参照图18对基于图17所示的扩大方法的各制约值的变化的例子进行补充。图18是表示了通过图17所示的扩大方法而各控制量的各制约值变化下去的状况的一个例子的时间图。
与实施方式9不同,在图18所示的例子中所使用的控制量为驱动转矩Tp、充放电量Pchg以及发动机转速Ne。另外,在该例子中所使用的控制量的制约值为驱动转矩Tp的上限制约值Tpmx,充放电量Pchg的2个下限制约值Win1、Win2(Win2<Win1)以及发动机转速Ne的2个上限制约值Nemx1、Nemx2(Nemx2>Nemx1)这5个。该例子中的各制约值的优先顺位的高低的一个例子为Nemx2>Win2>Tpmx>Nemx1>Win1。此外,在图18中,各制约值全部由单点划线表示,实线相当于各控制量的实际值。
图18表示混合动力车辆(参照图1)连续地在坡上下行的连续下坡时的制约值的变化的例子。在这样在坂上下行时,加速踏板被设为释放(off),对混合动力车辆要求高的车辆制动力。接受该要求,在图18所示的例子中,驱动转矩Tp的上限制约值Tpmx也随着时间经过而减少。为了实现高的车辆制动力,提高发动机转速Ne来提高发动机制动力和提高MG2的负转矩来提高再生制动力是有效的。于是,在该例子中,操作量决定部58在将驱动转矩Tp控制在如上述那样减少下去的上限制约值Tpmx附近的同时,决定操作量(Te、Tg、Tm)以使得发动机转速Ne变高、且为了再生发电而充放电量Pchg成为下限制约值Win1附近。
而且,在连续下坡中的时间点t11,在驱动转矩Tp接近上限制约值Tpmx、且充放电量Pchg接近下限制约值Win1的状况下,发动机转速Ne达到上限制约值Nemx1。当发动机转速Ne超过上限制约值Nemx1时,成为无法决定操作量。于是,在该控制例中,伴随着时间点t11的经过,优先顺位最低的下限制约值Win1被扩大为下限制约值Win2。其结果,能够在遵守上限制约值Tpmx和上限制约值Nemx1的同时,继续进行操作量的决定。
然后的时间点t12相当于即使下限制约值Win下降到下限制约值Win2、也无法遵守上限制约值Tpmx和上限制约值Nemx1这两方的时间点。在该控制例中,伴随着时间点t12的经过,与下限制约值Win1相比而优先顺位次低的上限制约值Nemx1被扩大为上限制约值Nemx2。其结果,能够在遵守上限制约值Tpmx和下限制约值Win2的同时,继续进行操作量的决定。
在然后的时间点t13,在驱动转矩Tp接近上限制约值Tpmx、且充放电量Pchg接近下限制约值Win2的状况下,发动机转速Ne达到上限制约值Nemx2。当发动机转速Ne超过上限制约值Nemx2时,成为无法决定操作量。于是,在该控制例中,伴随着时间点t13的经过,与上限制约值Nemx1相比而优先顺位次低的上限制约值Tpmx被扩大预定量。其结果,在图18所示的连续下坡的例子中,能够在遵守上限制约值Nemx2和下限制约值Win2的同时,继续进行操作量的决定以使得能得到所希望的车辆制动力。
如根据上述的图18所示的控制例可知那样,根据实施方式9涉及的对策,各制约值按优先顺位从低到高的顺序逐渐扩大。因此,如已经描述过的那样,能够在将控制量相对于各制约值的超过量抑制为最小限度的同时,避免成为无法决定操作量。另外,能够在重视优先级相对地高的制约值(在图18所示的例子中为上限制约值Nemx2和下限制约值Win2)的同时,避免成为无法决定操作量。
9-4.制约值的扩大方法的其他例子
在图17所示的例程的处理中,按优先顺位从低到高的顺序,制约值一个一个地被扩大下去(即,一次放宽多个制约条件中的一个)。然而,也可以代替这样的例子,而按优先顺位从低到高的顺序,同时扩大2个以上的制约值(即,也可以同时放宽2个以上的制约条件)。更详细而言,例如也可以同时扩大同一控制量的上限制约值和下限制约值。以下参照图19说明的方法,相当于用根据优先顺位(优先级)而不同的扩大量同时对2个以上的制约值进行扩大的方法的一个例子。
图19是表示与在步骤S304(参照图16)的处理中利用的制约值的扩大方法的其他一个例子有关的例程的流程图。在图19所示的例子中,也与图17所示的例子同样地,为了说明的简化,采取了仅使用两个制约值A、B、且制约值A的优先顺位比制约值B高的例子。
在图19所示的例程中,操作量决定部58执行步骤S500的处理。在步骤S500中,用与优先级(优先顺位)相应的扩大量扩大制约值A、B,用扩大后的值更新制约值A、B。具体而言,在步骤S500中,优先级相对地高的制约值A的扩大量比优先级相对地低的制约值B的扩大量小。这样,也可以在根据优先级对扩大量赋予差异的同时,扩大多个制约值。并且,通过这样的方法,与实施方式8同样地,也能够进行“在按优先级从高到地的顺序使相对于分别与多个第2制约条件对应的上限制约值或者下限制约值的超过量最小化的同时、对多个第2制约条件进行放宽的处理”。此外,与图19所示的例子不同,同时被扩大时的多个制约值的扩大量也可以相同。
补充来说,也可以组合图17所示的方法和图19所示的方法。为了那样的组合的具体说明,采取使用4个制约值A、B、C、D、且各制约值的优先级的高低为C>D>A>B的例子。在该例子中,首先,也可以是制约值A、B的扩大量被设为A<B,并且,制约值C、D的扩大量被设为C<D。并且,也可以根据与图17所示的例程的方法同样的想法,优先级相对地低的制约值A、B的组比制约值C、D的组先被扩大。
10.其他实施方式
在上述的实施方式1的“操作量决定部58”中,为了决定转矩设备的最佳操作量,对多个目标状态量设定了优先级P
最小化f6=(y
另外,在实施方式8和实施方式9中,对各控制量(控制对象的状态量)的多个制约值(多个制约条件)设定了优先级P
以上说明的各实施方式所记载的例子和其他各变形例既可以在所明示的组合以外也可能的范围内适宜地进行组合,另外,也可以在脱离本发明的宗旨的范围内进行各种变形。
- 一种无球笼万向节及整车前驱传动系统中间传动系统后驱传动系统
- 无球笼万向节及整车前驱传动系统、中间传动系统、后驱传动系统