一种自动焊接机械手
文献发布时间:2023-06-19 13:30:50
技术领域
本发明涉及焊接技术领域,具体为一种自动焊接机械手。
背景技术
机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置,很多地方都运用到机械手,在焊接某些大型部件时便会运用到机械手。
现有专利(公告号:CN112247430A)一种自动焊接机械手,涉及机械手领域,具体的说是一种自动焊接机械手,包括固定柱,包括固定柱的上端接触连接有底座,底座的上端通过螺栓可拆卸连接有固定盖,底座的内部固定连接有伺服电机,伺服电机的输出端朝上且贯穿固定盖,伺服电机的输出端上固定连接有机械手主体,机械手主体的固定座上通过防尘机构连接有绕线机构。本发明安装机械手主体的底座通过卡块、第一支柱、限位板和第二支柱卡接在固定柱上,且卡块通过弹性机构固定在固定柱上,安装时只需将弹性机构的卡头卡在卡块的内部,将卡块固定在固定柱上的第一卡槽内部,拆卸时只需将卡头从卡块的内部拔出来,便可将底座连同机械手主体从固定柱上拆下来,无需借助其他拆卸工具,较为方便。
上述专利中所涉及到的焊接机械手在使用与应用过程中,其焊接过程中需要依靠手工放料或输送放料,且在实际的焊接过程中管状材料的由于需要环状焊接,因此机械手在焊接的过程中需要旋转焊接管焊接处,以此来实现环状焊接,上述焊接机械手的焊接工作在实际的使用过程中并不具备对管件的输送以及焊接处的卡合旋转,导致管道焊接过程中的,两管道端的连接处贴合不紧密,影响焊接质量,同时现有的焊接机械手的焊接工作不具备对焊接过程中产生的焊接烟雾以及焊渣的清洁处理功能,导致焊接过程中产生的烟雾直接排放至焊接环境中,对焊接环境造成影响,同时焊渣的累积对焊接机械手的行进与一定均会造成影响:
为此,提出一种自动焊接机械手。
发明内容
本发明的目的在于提供一种自动焊接机械手,通过设置焊接平台并在焊接平台的下方设置排烟管、吸烟管以及涡流扇叶等结构,实现对焊接机械手焊接过程中产生的烟雾的吸收处理,避免焊接烟雾的直接排放对焊接环境造成影响,同时利用驱动辊实现焊接管在焊接过程中的自动输送以及对应焊接点位置,便捷焊接过程,通过涡流扇叶对焊接过程中产生的烟雾吸收,同时配合收集罩、输送管以及排烟管实现对焊接过程中产生的烟雾的吸收,防止烟雾逃逸至空气中对焊接过程造成影响,以解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:一种自动焊接机械手,包括支撑底座,所述支撑底座的上端面固定连接有机械手本体,所述支撑底座的上端面固定连接有焊接平台,所述焊接平台与机械手本体上设有用于对机械手本体焊接过程中产生的烟雾收集的收集机构,所述焊接平台内设有用于对机械手本体焊接过程中产生的焊渣收集的清洁机构,所述支撑底座的上端面固定连接有多个等间距设置的支撑架,所述支撑架上转动连接有多个变向轮,多个所述变向轮之间套设有驱动皮带,所述支撑底座的上端面固定连接有多个等间距设置的连接架,所述连接架上转动连接有驱动辊,所述焊接平台上贯穿转动连接有传动轴,所述支撑底座的上端面固定连接有传动电机,所述传动电机的输出轴与传动轴上均套设有传动带轮,两个所述传动带轮之间套设有皮带,所述连接架上设有用于对焊接管到焊接过程中输送的输送机构,所述焊接平台内开设有两个对称设置的连接槽,所述连接槽内设有用于对管道焊接过程中管道连接口固定的卡接机构。
通过设置焊接平台并在焊接平台的下方设置排烟管、吸烟管以及涡流扇叶等结构,实现对焊接机械手焊接过程中产生的烟雾的吸收处理,避免焊接烟雾的直接排放对焊接环境造成影响,同时利用驱动辊实现焊接管在焊接过程中的自动输送以及对应焊接点位置,便捷焊接过程。
优选的,所述收集机构包括固定连接在焊接平台下端面的吸烟管,所述吸烟管的下端面固定连接有排烟管,所述排烟管内转动连接有涡流扇叶,所述机械手本体的上端面设有焊接头,所述焊接头的侧壁上固定连接有收集罩,所述收集罩的两端端面均固定连接有输送管,两个所述输送管均连通排烟管。
通过涡流扇叶对焊接过程中产生的烟雾吸收,同时配合收集罩、输送管以及排烟管实现对焊接过程中产生的烟雾的吸收,防止烟雾逃逸至空气中对焊接过程造成影响。
优选的,所述清洁机构包括固定连接在排烟管上端面的滤网,所述涡流扇叶的转动轴贯穿转动连接滤网,所述转动轴的侧壁上周向固定连接有多个清洁杆,所述清洁杆内开设有活动孔,所述活动孔的内底部固定连接有连接杆,所述连接杆的侧壁上套设有导电杆,所述活动孔的内侧壁上固定连接有摩擦管,所述导电杆的内侧底部与活动孔的内底部之间弹性连接有复位弹簧,所述复位弹簧套设在连接杆的侧壁上,所述吸烟管的左右两端侧壁上固定连接有两个中心对称的消磁块,且所述消磁块为楔形。
通过设置滤网、清洁杆、连接杆以及摩擦管等结构,利用涡流扇叶的转动轴驱动多个清洁杆的旋转,并由于旋转过程中产生的离心力将导电杆由摩擦管内甩出去并通过接触过程中摩擦产生的带电电荷对细小杂质的吸附力对焊接过程产生焊渣以及杂质进行收集与清洁,同时配合消磁块对清洁杆上携带的电荷的转化,将杂质携带至排渣口处后自然下落并进行收集,实现对机械手焊接部位的焊渣的清洁,防止对机械手的运转造成影响。
优选的,所述输送机构包括固定连接在传动轴上的连接轴,所述连接轴的侧壁上的固定连接有驱动辊,所述连接轴的右侧端部周向开设有多个转动槽,所述转动槽内转动连接有转动齿,所述连接轴的右侧端部套设有连接套管,所述连接套管的内侧壁上周向固定连接有多个固定齿,所述固定齿啮合转动齿,所述驱动辊与连接架之间的夹角为30°。
利用驱动辊与焊接管道的倾斜接触,以及固定齿与转动齿之间的单向啮合,实现驱动辊的单向输送过程,为管道焊接过程中提供管道对接贴合所需输送动力,同时当驱动辊反向旋转时,仅为焊接管道提供单向输送的驱动,便捷管道的输送过程。
优选的,所述卡接机构包括贯穿转动连接在焊接平台内的过渡轴,所述过渡轴位于连接槽处的侧壁上固定连接有啮合齿轮,所述连接槽内转动连接有限位环,所述限位环的侧壁上周向固定连接有多个配合齿,所述啮合齿轮啮合多个所述配合齿,所述限位环内贯穿滑动连接有多个周向设置的驱动块,所述驱动块的内侧端部固定连接有夹持弧板,所述驱动块的外侧端部为楔形,所述焊接平台的上端面固定连接有连接底座,所述连接底座内周向固定连接有多个支撑杆,多个所述支撑杆的内侧端部固定连接有支撑环,所述支撑环的外侧侧壁上周向固定连接有多个限位杆,两个所述支撑杆上贯穿滑动连接有活动环,所述活动环贯穿滑动连接限位杆,且所述支撑环与活动环的相对侧壁上弹性连接有缓冲弹簧,所述活动环的左右两端侧壁上均转动连接有两个对称设置的接触滚轮,所述接触滚轮滚动连接限位环的内侧壁。
利用限位环上的配合齿与啮合齿轮之间的啮合,带动限位环的转动,同时为带动限位环内的驱动块对焊接部位管道的夹紧处理,又由活动环为驱动块的移动与夹紧过程提供驱动,实现对管道焊接部位的夹持,保证焊接过程中焊接端的两个管道之间的紧贴,避免焊接过程中由于管道的移动造成焊接处无法完全密封,影响焊接质量。
优选的,所述驱动块的外侧侧壁与限位环的内侧壁之间弹性连接有两个对称设置的连接弹簧。
利用连接弹簧,对驱动块的复位提供驱动力,同时便捷驱动块适应不同尺寸的管道夹紧过程。
与现有技术相比,本发明的有益效果是:
1、通过设置焊接平台并在焊接平台的下方设置排烟管、吸烟管以及涡流扇叶等结构,实现对焊接机械手焊接过程中产生的烟雾的吸收处理,避免焊接烟雾的直接排放对焊接环境造成影响,同时利用驱动辊实现焊接管在焊接过程中的自动输送以及对应焊接点位置,便捷焊接过程,通过涡流扇叶对焊接过程中产生的烟雾吸收,同时配合收集罩、输送管以及排烟管实现对焊接过程中产生的烟雾的吸收,防止烟雾逃逸至空气中对焊接过程造成影响;
2、通过设置滤网、清洁杆、连接杆以及摩擦管等结构,利用涡流扇叶的转动轴驱动多个清洁杆的旋转,并由于旋转过程中产生的离心力将导电杆由摩擦管内甩出去并通过接触过程中摩擦产生的带电电荷对细小杂质的吸附力对焊接过程产生焊渣以及杂质进行收集与清洁,同时配合消磁块对清洁杆上携带的电荷的转化,将杂质携带至排渣口处后自然下落并进行收集,实现对机械手焊接部位的焊渣的清洁,防止对机械手的运转造成影响。
3、利用驱动辊与焊接管道的倾斜接触,以及固定齿与转动齿之间的单向啮合,实现驱动辊的单向输送过程,为管道焊接过程中提供管道对接贴合所需输送动力,同时当驱动辊反向旋转时,仅为焊接管道提供单向输送的驱动,便捷管道的输送过程。
4、利用限位环上的配合齿与啮合齿轮之间的啮合,带动限位环的转动,同时为带动限位环内的驱动块对焊接部位管道的夹紧处理,又由活动环为驱动块的移动与夹紧过程提供驱动,实现对管道焊接部位的夹持,保证焊接过程中焊接端的两个管道之间的紧贴,避免焊接过程中由于管道的移动造成焊接处无法完全密封,影响焊接质量。
附图说明
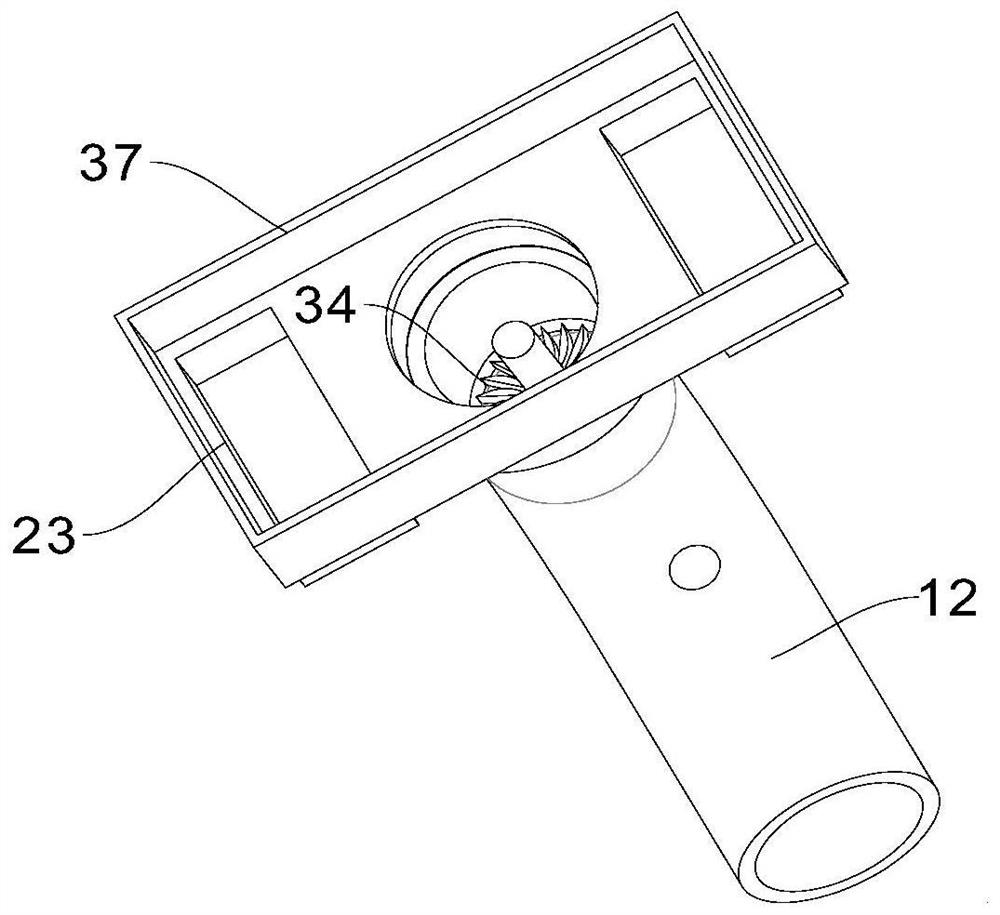
图1为本发明的吸烟管立体结构示意图;
图2为本发明的主视图;
图3为本发明的支撑架结构示意图;
图4为本发明的驱动辊连接结构示意图;
图5为本发明的转动齿与固定齿啮合示意图;
图6为本发明的图2中A处结构放大示意图;
图7为本发明的吸烟管俯视结构示意图;
图8为本发明的图7中B处结构放大示意图;
图9为本发明的焊接平台结构示意图;
图10为本发明的限位环剖面结构左视示意图;
图11为本发明的连接底座内部结构示意图;
图12为本发明的焊接平台俯视图示意图。
图中:1、支撑底座;2、机械手本体;3、连接底座;4、活动环;5、焊接头;6、收集罩;7、输送管;8、传动电机;9、传动轴;10、接触滚轮;11、连接架;12、排烟管;13、驱动辊;14、支撑架;15、驱动皮带;16、焊接平台;17、连接轴;18、转动槽;19、固定齿;20、转动齿;21、连接套管;22、变向轮;23、排渣口;24、过渡轴;25、啮合齿轮;26、滤网;27、限位环;28、配合齿;29、驱动块;30、清洁杆;31、消磁块;32、限位杆;33、支撑环;34、涡流扇叶;35、连接杆;36、摩擦管;37、吸烟管。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1至图12,本发明提供一种技术方案:
一种自动焊接机械手,如图1至图4所示,包括支撑底座1,支撑底座1的上端面固定连接有机械手本体2,支撑底座1的上端面固定连接有焊接平台16,焊接平台16与机械手本体2上设有用于对机械手本体2焊接过程中产生的烟雾收集的收集机构,焊接平台16内设有用于对机械手本体2焊接过程中产生的焊渣收集的清洁机构,支撑底座1的上端面固定连接有多个等间距设置的支撑架14,支撑架14上转动连接有多个变向轮22,多个变向轮22之间套设有驱动皮带15,支撑底座1的上端面固定连接有多个等间距设置的连接架11,连接架11上转动连接有驱动辊13,焊接平台16上贯穿转动连接有传动轴9,支撑底座1的上端面固定连接有传动电机8,传动电机8的输出轴与传动轴9上均套设有传动带轮,两个传动带轮之间套设有皮带,连接架11上设有用于对焊接管到焊接过程中输送的输送机构,焊接平台16内开设有两个对称设置的连接槽,连接槽内设有用于对管道焊接过程中管道连接口固定的卡接机构。
通过设置焊接平台16并在焊接平台16的下方设置排烟管12、吸烟管37以及涡流扇叶34等结构,实现对焊接机械手焊接过程中产生的烟雾的吸收处理,避免焊接烟雾的直接排放对焊接环境造成影响,同时利用驱动辊13实现焊接管在焊接过程中的自动输送以及对应焊接点位置,便捷焊接过程;
工作时,支撑架14上多个变向轮22驱动其上的驱动皮带15的运转,通过驱动皮带15的形变与管件的紧密贴合同时在多个变向轮22的作用下保持涨紧,并转动可实现对管件在输送以及焊接过程中的转动驱动,同时驱动辊13在单方向上的驱动实现给管件的自动前移时的摩擦驱动,为管件焊接前做一定的输送以及转动动力的驱动过程。
作为本发明的一种实施方式,如图1、图6至图7所示,收集机构包括固定连接在焊接平台16下端面的吸烟管37,吸烟管37的下端面固定连接有排烟管12,排烟管12内转动连接有涡流扇叶34,机械手本体2的上端面设有焊接头5,焊接头5的侧壁上固定连接有收集罩6,收集罩6的两端端面均固定连接有输送管7,两个输送管7均连通排烟管12。
通过涡流扇叶34对焊接过程中产生的烟雾吸收,同时配合收集罩6、输送管7以及排烟管12实现对焊接过程中产生的烟雾的吸收,防止烟雾逃逸至空气中对焊接过程造成影响;
工作时,涡流扇叶34在吸烟管37内的转动,对焊接平台16处焊接产生的焊接烟雾进行吸收过程,避免烟雾的直接排放,对焊接环境造成影响,同时在焊接头5上的收集罩6可实现对焊接烟雾吸收的辅助吸收效果。
作为本发明的一种实施方式,如图1、图7与图8所示,清洁机构包括固定连接在排烟管12上端面的滤网26,涡流扇叶34的转动轴贯穿转动连接滤网26,转动轴的侧壁上周向固定连接有多个清洁杆30,清洁杆30内开设有活动孔,活动孔的内底部固定连接有连接杆35,连接杆35的侧壁上套设有导电杆,活动孔的内侧壁上固定连接有摩擦管36,导电杆的内侧底部与活动孔的内底部之间弹性连接有复位弹簧,复位弹簧套设在连接杆35的侧壁上,吸烟管37的左右两端侧壁上固定连接有两个中心对称的消磁块31,且消磁块31为楔形。
通过设置滤网26、清洁杆30、连接杆35以及摩擦管36等结构,利用涡流扇叶34的转动轴驱动多个清洁杆30的旋转,由于旋转过程中产生的离心力导电杆由摩擦管36内甩出,并通过接触过程中摩擦产生的带电电荷对细小杂质的吸附力对焊接过程产生焊渣以及杂质进行收集与清洁,同时配合消磁块31对清洁杆30上携带的电荷的转化,将杂质携带至排渣口23处后自然下落并进行收集,实现对机械手焊接部位的焊渣的清洁,防止对机械手的运转造成影响;
工作时,管件在机械手本体2的焊接过程中,在焊接平台16上会残留一定量的焊渣,由于焊渣的温度较高同时掉落后具有一定的冷却时间,为防止焊渣的堆积对焊接过程造成影响,该过程中在涡流扇叶34传动杆的驱动作用下,带动滤网26上方多个清洁杆30的旋转,清洁杆30旋转过程中产生的离心力将导电杆由摩擦管36内甩出去并通过接触过程中摩擦产生的带电电荷对细小杂质的吸附力对焊接过程产生焊渣以及杂质进行收集与清洁,有带点的导电杆对于细小的杂质具有一定的吸附作用,此时导电杆处于排渣口23附近时由于离心力被甩出即可实现对细小焊渣的吸附与清洁过程,其余较大的焊渣直接通过清洁杆30的旋转以及离心力的作用下甩入排渣口23内,此过程中,导电杆接触消磁块31后,其上产生的电荷被转移至消磁块31上,其上不带电,此时在离心力的作用下其上粘黏的细小杂质便会被排放出去,从而完成对焊渣的清洁过程。
作为本发明的一种实施方式,如图4至图5所示,输送机构包括固定连接在传动轴9上的连接轴17,连接轴17的侧壁上固定连接有驱动辊13,连接轴17的右侧端部周向开设有多个转动槽18,转动槽18内转动连接有转动齿20,连接轴17的右侧端部套设有连接套管21,连接套管21的内侧壁上周向固定连接有多个固定齿19,固定齿19啮合转动齿20,驱动辊13与连接架11之间的夹角为30°,转动齿20的转动轴上设有扭力弹簧,且扭力弹簧的两端分别固定连接转动齿20的侧壁与转动槽18的内侧壁。
利用驱动辊13与焊接管道的倾斜接触,以及固定齿19与转动齿20之间的单向啮合,实现驱动辊13的单向输送过程,为管道焊接过程中提供管道对接贴合所需输送动力,当驱动辊13反向旋转时,在固定齿19与转动齿20的接触作用下,转动齿20与固定齿反向接触时,转动齿20转动在转动槽18内,此时连接套管21无法为连接轴17提供转动动力,连接套管21与连接轴17之间设置的转动槽18、转动齿20以及固定齿19所起到与现有技术中的单向轴承功能相同,用于实现动力的单向传递,因此仅正向转动时可为焊接管道提供单向输送的驱动,便捷管道的输送过程;
工作时,驱动辊13正向旋转时,连接轴17上转动槽18内的转动齿20处于逆时针旋转状态,此时由于转动槽18右侧侧壁的相抵作用下,转动齿20处于固定状态,此时转动齿20与固定齿19相抵并实现卡合,即连接套管21与连接轴17之间形成同一转动状态,当驱动辊13反向转动时,由于此时转动齿20没有转动方向上的限位,当固定齿19与转动齿20接触时,此时转动齿20转动至转动槽18内,此时连接轴17与连接套管21为非连接状态,此时驱动辊13无法为管件提供前移的驱动力,仅跟管件的旋转而转动。
连接轴17为分段式,通过对应的驱动辊13右侧的连接套管21实现单向传动,反转时,左侧第一个驱动辊13处于旋转,如反转之后位于右侧的多个驱动辊13都不旋转,此时传动动力将无法正常传递,此时驱动轴9旋转带动左侧的驱动辊13旋转,而驱动管件的运转转动,因中间部位有夹持装置,因此此时管件仅发生旋转,旋转过程中带动驱动皮带15的运转而实现中间部位动力的传输,由于反转过程中管件已经出于夹紧状态,此时左侧的第一个驱动辊13并不会带动管件的移动。
作为本发明的一种实施方式,如图9至图12所示,包括贯穿转动连接在焊接平台16内的过渡轴24,过渡轴24位于连接槽处的侧壁上固定连接有啮合齿轮25,连接槽内转动连接有限位环27,限位环27的侧壁上周向固定连接有多个配合齿28,啮合齿轮25啮合多个配合齿28,限位环27内贯穿滑动连接有多个周向设置的驱动块29,驱动块29的内侧端部固定连接有夹持弧板,驱动块29的外侧端部为楔形,焊接平台16的上端面固定连接有连接底座3,连接底座3内周向固定连接有多个支撑杆,多个支撑杆的内侧端部固定连接有支撑环33,支撑环33的外侧侧壁上周向固定连接有多个限位杆32,两个支撑杆上贯穿滑动连接有活动环4,活动环4贯穿滑动连接限位杆32,且支撑环33与活动环4的相对侧壁上弹性连接有缓冲弹簧,活动环4的左右两端侧壁上均转动连接有两个对称设置的接触滚轮10,接触滚轮10滚动连接在限位环27的内侧壁上,其中过渡轴24的一端轴端与传动轴9上均设有传动带轮且传动带轮内设有单向轴承,两个传动带轮之间通过传动皮带连接传动。
利用限位环27上的配合齿28与啮合齿轮25之间的啮合,带动限位环27的转动,同时为带动限位环27内的驱动块29对焊接部位管道的夹紧处理,又由活动环4为驱动块29的移动与夹紧过程提供驱动,达到对管道焊接部位的夹持效果,保证焊接过程中焊接端的两个管道之间的紧贴,避免焊接过程中由于管道的移动造成焊接处无法完全密封,影响焊接质量;
驱动块29的外侧侧壁与限位环27的内侧壁之间弹性连接有两个对称设置的连接弹簧。
利用连接弹簧,对驱动块29的复位提供驱动力,同时便捷驱动块29适应不同尺寸的管道夹紧过程。
工作时,首先过渡轴24驱动焊接平台16内的啮合齿轮25的转动,通过与限位环27上配合齿28的啮合而驱动限位环27的旋转,随着驱动辊13对管件输送,当管件穿过一端限位环27时,连接底座3与支撑环33之间的活动环4与限位环27内的驱动块29的外侧侧壁相接触,由于驱动块29的外侧侧壁为楔形,此时多个驱动块29之间的间距缩小,对管件进行夹持过程,当驱动块29对管件进行夹持后,此过程中活动环4与驱动块29始终保持紧贴状态,而随着传动轴9的反向转动即可实现活动环4与驱动块29之间的相对静止即可实现对管件的夹紧处理,利用单向轴承实现传动轴9反向转动时,过渡轴24不旋转,此时即实现对管件输送过程中以及焊接结束后传动轴9反向旋转过程中,管件的脱离,此过程中管件处于进料状态,两个管件保持相对移动,同时当活动环4与驱动块29接触并挤压时,驱动块29之间的间距缩小,若并未对管件进行夹持,此时管在驱动块29的外侧被阻挡,当驱动块29之间的间距增大时,管件即可穿过多个驱动块29并由于两个管件为同一运动状态并移动距离相同,因此可实现同时相抵且位于焊接平台中间位置上此时多个限位杆32即可对活动环4的向外牵引并向外活动,下连接弹簧的牵引作用下对驱动块29保持一定的牵引效果,保持其对管道的加紧过程。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种手持RFID识别医械清点设备
- 一种点动控械机械手