一种自浮体双驱动的波浪能收集装置
文献发布时间:2023-06-19 09:26:02
技术领域
本发明属于波浪能利用的绿色再生能源领域,特别涉及一种自浮体双驱动的波浪能收集装置。
背景技术
波浪能是指水面波浪所具有的能量,在海洋、湖泊、水库中分布范围广、能量密度高,是一种快速发展的绿色再生能源。全球海洋波浪能蕴藏量约21亿千瓦,我国沿岸波浪能资源理论平均功率约0.13亿千瓦,具有良好的开发应用价值。
目前波浪能收集装置的类型主要有:聚波沉潜压差式、波浪衰减式、水柱振荡式、浪涌摆荡式、点头鸭式、越顶式、鹰式、筏式等等。按照波浪能收集方式大致可分为四类:离合器齿轮箱式、液压式、气压式和直驱式,但基本都是单体收集波浪能。近年来,采用直线转换电机直接将波浪能转换为电能的直驱式转换系统得到大力的发展。
波浪在空间上具有三维性,在时间上具有随机性,在频率、相位、波幅和方向等方面则具有不恒定性。这些特性对波浪能收集的负面影响很大,使单体波浪能收集装置的设计极为复杂,所收集的波浪能也很不稳定。现有各式波浪能转换装置的研发都在致力于降低波浪的三维性、随机性和不恒定性对波浪能收集的不利影响。
本申请人已于2018年提出了一种波浪能收集装置(申请公布号CN 109139341 A,申请公布日2019.01.04,后文简称“已申请专利”)。
上述已申请专利公开的核心理念为:充分利用波浪的三维性、随机性和不恒定性,各波浪能收集构件独立运行,通过棘轮驱动主轴沿一致方向旋转,经传动轴汇聚后获得稳定的机械能,实现波浪能的收集。
上述已申请专利的技术方案为:“包括工作平台、N个波浪能收集系统、传动装置、调速装置和能量转换系统”;“各波浪能收集系统均分别包括在框架上分别安装的一个水平主轴和M个平行设置的竖直滑轨,各滑轨上分别设有一个波浪能收集构件”。
上述已申请专利的关键结构体为“波浪能收集构件”,其实现要点是需要一个大型的工作平台和多个架设滑轨的框架。波浪能收集构件沿滑轨上下滑动,当浮球处于波谷的最下端时靠单一的连杆悬挂支撑。在波浪横向推力的作用下,浮球为一端约束的悬臂支撑,易于受损甚至折断。波浪能收集构件上升时,齿条啮合棘轮正向旋转做功,下降时棘轮反转不做功,属于单齿条驱动。
发明内容
本发明的目的在于克服现有技术的不足之处,提出一种自浮体双驱动波浪能收集装置,充分利用波浪的三维性、随机性和不恒定性,对波浪能进行收集。相比于本申请人已申报的一种波浪能收集装置,本发明可省去工作平台,构筑物更加简洁,建造成本显著降低;一端单杆悬臂支撑浮球改为4轴两端支撑浮体,安全性大为提升;双齿条、双棘轮模式使波浪能收集部件上下运动均能做功,明显提高波浪能收集效率。
为了实现上述目的,本发明采用如下技术方案:
本发明提出的一种自浮体双驱动的波浪能收集装置,其特征在于,包括安装平台、M×N个波浪能收集部件、M×N个双棘轮部件、N根动力轴、联动部件和M×N个齿条支撑部件;其中,
所述安装平台为一框架结构,用于为所述波浪能收集部件提供安装基础,并为整体装置提供浮力;
M×N个所述波浪能收集部件,按矩形均匀分布的模式固定在安装平台上,每个波浪能收集部件均分别包括一个浮体和固定于该浮体上的齿面相向的两根齿条,浮体中有四个垂向通孔,可以沿安装平台内的四根相应滑轨上下升降,每个波浪能收集部件均随波浪升降而独立运动;
各双棘轮部件分别与相应的一个波浪能收集部件相配合;所述双棘轮部件包括一个棘轮内环,以及套设在该棘轮内环上的两个间隔设置且可相互独立转动的棘轮外环和两个棘爪组,各棘爪组分别包括偶数个棘爪,各棘爪的棘爪尖朝向均相同;在棘轮内环外圈上与两个棘轮外环中部相对应位置处分别设有一道凸起的安装环,在棘轮内环的各安装环两侧分别设有一个轴承,用于限制两个棘轮外环沿棘轮内环轴向的移动;在同一安装环上均匀开设多个用于容纳相应棘爪一端的棘爪穴,位于同一安装环上的各棘爪的另一端为棘爪尖,分别与相应棘轮外环内圈上的齿部相配合,各安装环的顶部与相应棘轮外环内圈上齿尖所在的内接圆之间有一定的间隙,保证在轴承的支撑下使两个棘轮外环与棘轮内环同心且独立旋转;在各棘爪的背部及其所在安装环的中心处沿棘轮内环圆周分别开设弹簧槽,该弹簧槽内设有第一弹簧,当棘轮外环在波浪的作用下沿安装平台内相应的滑轨升降运动时,通过第一弹簧及棘爪与棘轮外环内圈上齿部的配合使棘爪在平卧和翘起两种位姿之间转换,从而使棘轮外环与棘轮内环之间在相对滑动和同步转动之间转换;
N根所述动力轴,相应的M个双棘轮部件中的棘轮内环套设于一根动力轴上,且棘轮内环的内径与动力轴键配合;
所述联动部件,包括传动轴、固定安装在传动轴上的N个第一伞齿轮,套设于各动力轴一端的一个第二伞齿轮、第二轴承和离合器,设置于离合器外侧的手柄,以及连接于离合器和手柄之间的第二弹簧;各第一伞齿轮分别与相应的一个第二伞齿轮啮合;离合器与相应的第二伞齿轮之间通过第二轴承使得离合器不随第二伞齿轮和动力轴的旋转而旋转;手柄一端通过转轴安装于安装平台上、另一端为自由端;第二弹簧的下端和离合器的定位销固定,第二弹簧的上端通过位于手柄自由端的第二固定销固定;通过推动手柄使第一伞齿轮和第二伞齿轮啮合或脱离;
M×N个齿条支撑部件,分别安装于安装平台上,且位于相应一个波浪能收集部件的两根齿条的背面侧,包括位于各齿条背面侧的支撑块,和位于支撑块顶部且与各齿条背面靠紧的滚轮。
本发明装置的特点及有益效果
本装置充分利用天然波浪的三维、随机和不恒定的自然属性,采用公知的棘轮技术和联动部件,将波浪能最大限度地转换成转动机械能,实现绿色再生能源的有效利用。
安装平台的框架结构除了为波浪能收集部件提供安装基础外,还为本装置提供浮力,使整体装置的结构大为简化,节省建造成本。
本发明装置的重要结构体为波浪能收集部件,核心为甲乙双齿条和甲乙双棘轮配合。在波浪的作用下浮体连带双齿条上升时,甲齿条啮合甲棘轮旋转而驱动动力轴旋转做功;与甲齿条齿面相对布设的乙齿条则使乙棘轮空转。当浮体连带双齿条下降时,乙齿条与乙棘轮啮合,在波浪能收集部件自重的作用下,驱动动力轴沿同一方向旋转做功,甲棘轮则空转。即在波浪能收集部件上升或下降的过程中,利用双齿条和双棘轮实现双驱动做功。
由M个波浪能收集部件顺序排列成1组,共同驱动1根动力轴旋转。由于每个波浪能收集部件之间均为独立的自主运动,有机会就出力推动动力轴沿同一方向旋转,没有机会则绝不阻碍其它波浪能收集部件的出力。虽然每个波浪能收集构件感受到的波浪作用力具有三维性、随机性和不恒定性,但对每个波浪能收集部件而言,其出力的概率是均等的,所以当波浪能收集部件的数量足够多(安装平台足够大)时,动力轴的转速趋于稳定。
将N根动力轴以联动部件连接,将各自的旋转机械能汇聚成稳定、匀速的旋转机械能,再传递给同一台能量利用部件做功。
本装置可配合海上风能设备一起建造,相互协调补充,共用基础平台和电力配送资源。本装置可在海洋、湖泊和水库等地建造;特别适合于离岸岛礁和远洋作业平台供电,可节省大量运输资源。
附图说明
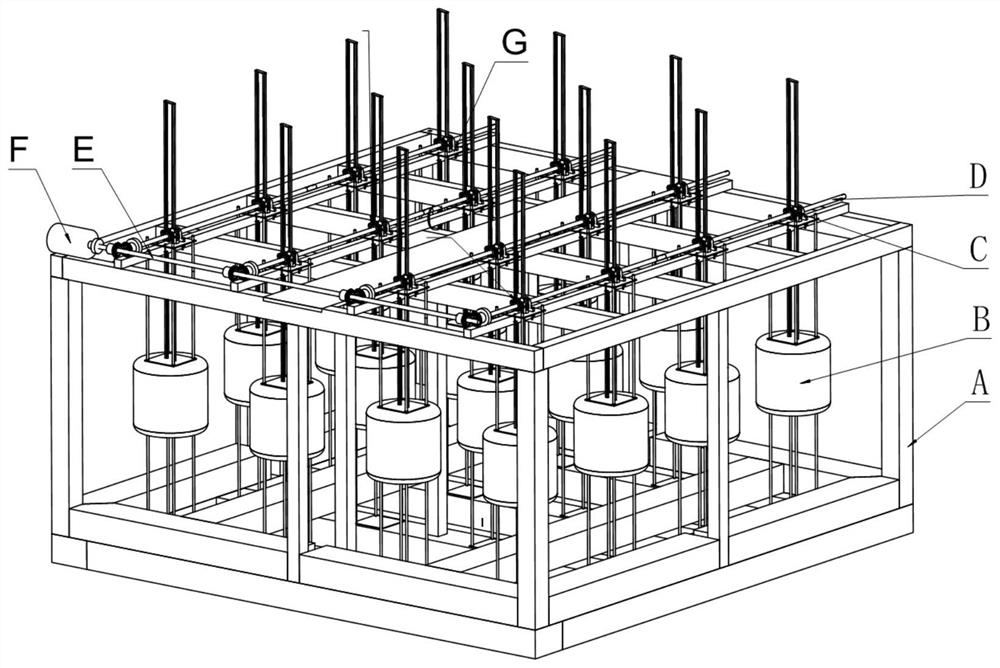
图1是本发明实施例装置的总体结构示意图。
图2是图1中安装平台的结构示意图。
图3是图1中波浪能收集部件的结构示意图。
图4是图2中双棘轮部件的结构示意图;其中,
(a)为双棘轮部件的侧视图,
(b)为图(a)中的C-C剖面视图,
(c)为图(b)中的局部放大图D。
图5是图4中双棘轮内环的结构示意图;其中,
(a)为双棘轮内环的侧视图,
(b)、(c)、(d)分别为图(a)中的D-D、G-G和H-H剖面视图。
图6是动力轴与联动部件的结构示意图。
图7是图6中离合器3种工况的示意图。
图8是图2中水平主轴和齿条支撑部件的结构示意图。
具体实施方式
以下将结合附图1~附图8及实施例对本发明的一种自浮体双驱动波浪能收集装置进行详细说明。
图1为本发明实施例的总体结构示意图,包括安装平台A、M×N个波浪能收集部件B(M为沿纵向在一根动力轴上顺序安装的波浪能收集部件B的个数,N为沿横向布置的每根含有M个波浪能收集部件B的动力轴的根数,M和N可以相同或不同,本实施例中M=N=4)、M×N个双棘轮部件C、N根动力轴D、联动部件E、能量利用部件F和M×N个齿条支撑部件G。其中:
安装平台A为一框架结构,用于为M×N个波浪能收集部件B提供安装基础,并为整体装置提供浮力。本实施例的安装平台A的结构见图2,该安装平台由顶部框架A1、多根立柱A2和底部框架A3焊接构成基本框架;顶部框架A1由两根纵梁A1a和若干横梁A1b(本实施例中采用5根横梁)焊接而成;底部框架A3由四根密闭矩形钢管围合而成,在底部框架A3的上平面安装多根密闭玻璃钢管A4以增加浮力。在顶部框架A1的上平面设置步道A5用于运行操作和检修的通道(图1中只画出局部),并在顶部框架A1的上平面焊接N根纵向上安装梁A7,在底部框架A3内侧焊接M根横向下安装梁A8(矩形密闭钢管)。在上安装梁A7的上平面且与各波浪能收集部件B对应位置处分别布设上安装板A6,在下安装梁A8的上平面设置与上安装板A6大小相同、平面位置对应的下安装板A9。在各上安装板A6和下安装板A9的四角均分别开设四个安装孔,上安装板A6和下安装板A9相对应的两个安装孔分别固定一根滑轨A10的上下端,即在相应的一个上安装板A6和下安装板A9之间共设有四根滑轨A10,以实现相应波浪能收集部件B沿滑轨A10的上下运动。安装平台A应满足保持装置稳定的强度和刚度的要求,其平面面积足够大,使装置只随平均水位或平均潮位(一日潮或半日潮)而升降,不随波浪运动而颠簸。
M×N个波浪能收集部件B,按矩形均匀分布的模式固定在安装平台A中相应的一个上安装板A6和下安装板A9之间。本实施例中的各波浪能收集部件B的结构相同,现以其中一个为例进行说明,参见图3,波浪能收集部件B包括浮体B1、固定于浮体B1上平面的加强连接板B2和安装在连接板B2上且齿面相向、左右错开的两根齿条B4,以及位于两根齿条上端的连接块B5。在浮体B1内设有四个竖向通孔B3,分别穿过安装平台A中相应的一根滑轨A10。波浪能收集部件B由四根两端固定的滑轨A10支撑,具有良好的抗横向冲击的能力,在波浪的作用下各波浪能收集部件B沿滑轨A10独立地升降。本实施例浮体B1的水平投影面积约在1m
M×N个双棘轮部件C的结构相同,参见图4和图5。各双棘轮部件C分别与相应的一个波浪能收集部件B相配合。双棘轮部件C包括一个棘轮内环C1,以及套设在该棘轮内环C1上的两个间隔设置且可相互独立转动的棘轮外环(C4a和C4b)和两个棘爪组,棘轮外环C4a和C4b的内圈上均设有多个齿部,各棘爪组分别包括偶数个棘爪(本实施例中各棘爪组均分别含有6个棘爪),各棘爪的棘爪尖朝向均相同(本实施例的图4中,棘爪尖朝右,当浮体上升、棘轮外环逆时针旋转时,驱动动力轴旋转做功);在棘轮内环C1外圈上与两个棘轮外环C4a和C4b中部相对应位置处分别设有一道凸起的安装环Ch,在棘轮内环C1的各安装环Ch两侧分别设有一个轴承C3(图5的D-D剖面图中仅示意出了支撑右侧棘轮外环C4b的两个轴承C3,支撑左侧棘轮外环的两个轴承未示意出),用于限制各棘轮外环C4a和C4b沿棘轮内环C1轴向的移动;在同一安装环Ch上均匀开设多个用于容纳相应棘爪一端C2f的棘爪穴C1a,位于同一安装环Ch上的各棘爪的另一端为棘爪尖C2c,分别与相应棘轮外环内圈上的齿部相配合,各安装环Ch的顶部与相应棘轮外环内圈上齿尖所在的内接圆之间有一定的间隙,保证在轴承C3的支撑下使棘轮外环C4a和C4b与棘轮内环C1同心但可以独立旋转;在各棘爪的背部C2d及其所在安装环Ch的中心处沿棘轮内环C1圆周分别开设弹簧槽C2e和C1e,弹簧槽内设有弹簧C5a和C5b,当棘轮外环C4a和C4b在波浪的作用下沿安装平台A内相应的滑轨A10升降运动时,通过弹簧C5a及棘爪与棘轮外环内圈上齿部的配合使得棘爪在平卧和翘起两种位姿之间转换;参见图4中(c),为当与棘轮外环C4a相配合的棘爪C2a处于翘起位姿时的示意图,设此时的棘轮外环C4a逆时针转动,内环C1也与其同步转动,通过棘轮内环C1及与其键配合的动力轴D,驱动动力轴D逆时针旋转;当棘轮外环C4a顺时针旋转,棘轮外环C4b的内齿尖C4d在棘爪背C2d上滑动,棘轮外环C4b与棘轮内环C1相对滑动,但不干扰其它棘轮做功,图中C5b为与棘爪C2b相配合的弹簧。
参见图4,两个棘爪组C2a和C2b的棘爪尖C2c的指向相同、结构相同,在此只描述棘爪组C2a的构成。棘爪组C2a的六个棘爪,对称分布放入棘轮内环C1其中一个安装环Ch的相应棘爪穴C1a中,各棘爪一端C2f与相应棘爪穴C1a的圆弧半径相同且同心;用弹簧C5a卡住棘爪背C2d的弹簧槽C2e再卡在图5(b)的棘轮内环C1的弹簧槽C1e中,保证棘爪可以沿棘爪穴C1a的圆弧中心旋转但不能平移。
参见图4,两个棘轮外环C4a和C4b的结构均相同,现以棘轮外环C4a为例进行说明。棘轮外环C4a内圈上的齿部数为6K-2(K为正整数,与齿轮模数、直径有关,本实施例取K=5,即齿部数为28)。在运行工况下,棘轮外环C4a逆时针旋转,其内的齿尖C4d与棘爪背C2d在Cp1(Cp2)点滑动接触,棘爪逐渐张开,直至其中位于棘轮外环圆周方向的两个棘爪C2c顶住棘轮外环C4a内齿部的齿根Cp,将旋转力传递给动力轴D,由于两个棘爪C2c沿径向对称布置,所以动力轴D只承受旋转力的扭矩而不受剪切力。
参见图4和图5,设棘爪尖C2c处于棘轮外环C4a两个相邻内齿尖C4d之间的任意位置,棘爪背C2d在Cp1(Cp2)点处于棘轮外环C4a内齿尖C4d挤压的状态,当棘轮外环C4a逆时针旋转时,棘爪背C2d逐渐脱离棘轮外环C4a内齿尖C4d的挤压,弹簧C5a压住棘爪弹簧槽C2e的左端点使棘爪在棘爪穴C1a中逆时针转动、棘爪尖C2c逐渐翘起,至Cp点顶住棘轮外环C4a内齿根C4c时,棘轮外环C4a与内环C1同步逆时针转动,通过棘轮内环C1及与其键配合的动力轴D,驱动动力轴D逆时针旋转;当棘轮外环C4a顺时针旋转时,棘轮外环C4a的内齿尖C4d滑动挤压棘爪背C2d,棘爪顺时针转动、弹簧槽C2e左端点抬升,顶住弹簧C5a使之张开、棘爪平卧,棘轮外环C4a与棘轮内环C1相对滑动,但不干扰其它棘轮做功(棘轮的详细结构和运动模式参考公知的棘轮技术)。
两个棘轮外环C4a和C4b分别与相应的一个波浪能收集部件B的一根齿条B4啮合,图8中左侧棘轮外环C4a与第一齿条B4a啮合,右侧棘轮外环C4b与第二齿条B4b啮合。棘轮内环C1套设在相应的一个动力轴D上,且棘轮内环C1的内径与动力轴D键配合。
参见图6,本实施例的M个双棘轮部件C安装在同一根动力轴D上,通过动力轴D将M个波浪能收集部件C独自获得的机械能汇聚为稳定旋转的机械能。动力轴D由设置在上安装板A6上的带座轴承G10支撑(见图8)。
本实施例的联动部件E采用传动轴加伞齿轮的联动模式,示意如图6。联动部件E包括传动轴Ea、固定安装在传动轴Ea上的N个伞齿轮Eb,N个伞齿轮Eb均匀套设在传动轴Ea上,且分别与每根动力轴D的左端设置的一个伞齿轮ED啮合。在一般情况下,取伞齿轮Eb与伞齿轮ED的模数和齿数均相同,则动力轴D和传动轴Ea的转速相同。伞齿轮ED与动力轴D键配合而同步旋转、但各伞齿轮ED可沿动力轴D左右滑动。
参见图7,在各伞齿轮ED右部的外圆周还滑动套设有离合器EF,离合器EF与伞齿轮ED同心,其右端与伞齿轮ED之间通过圆锥滚子轴承EG接触,使得离合器EF在正常运行工况时不随伞齿轮ED和动力轴D的旋转而旋转。在离合器EF外侧设有手柄EH,在离合器EF与手柄EH之间通过离合器EF的定位销EL连接,手柄EH下端开孔安装在上安装梁A7上的转轴EP上,手柄EH中部卡在离合器EF的定位销EL上,手柄EH上端为自由端,具体地,在手柄EH上部设置弹簧EK的上固定销EJ,弹簧EK的下端则固定在离合器EF的定位销EL上。图6和图7中(I)和(Ⅲ)分别为采用离合器EF使伞齿轮ED与伞齿轮Eb啮合和脱离时的状态示意图。在运行工况下,左推手柄EH,离合器EF将伞齿轮ED滑动左移使之与伞齿轮Eb啮合,传递旋转力;当某一动力轴D所集成的波浪能收集部件B需要单独检修时,右拉手柄EH使伞齿轮ED与Eb脱离即可。在离合器EF左右移动过程中会经过中位(Ⅱ),在中位时,离合器EF的定位销EL与转轴EP的距离最短,由于上固定销EJ至转轴EP的长度固定,则上固定销EJ至离合器EF的定位销EL之间的长度最长,弹簧EK被拉紧,即手柄EH处于中位(Ⅱ)时不稳定,处于啮合或脱离状态时均是稳定的,可以保证啮合或脱离两种工况的正常运行。
通过联动部件E将N根动力轴D的旋转机械能汇聚成稳定、均匀的旋转机械能,再传递给能量利用部件F。能量利用部件F可以是发电机、也可以是离心式海水淡化装置等。能量利用部件F的实施方案不属本申请的技术范畴。
假定在某一时刻,传动轴Ea的转速为V
进一步地,参见图8,在上安装板A6上设置右齿条支撑块G2a,其上的滚轮G3a靠紧齿条B4a的背面,使齿条B4a的齿面与棘轮外环C4a的齿良好啮合,滚轮G3a的两翼贴紧齿条B4a(或B4b)的两侧,限制齿条的摆动。左侧的齿条支撑块G2b和滚轮G3b的作用与右侧相同。为了保证在遭遇台风等极端气象事件时本装置不致损坏,在左齿轮支撑块G2b的上部增加齿条限位块G4,齿条限位块G4左端的伸缩柱G5(具有防旋转和移动限位的构件)穿过左齿轮支撑块G2b上部的孔;齿条限位块G4右端竖向开矩形孔,矩形孔宽度与齿条B4b同宽(具有一定间隙的动配合),长度比齿条截面长度加齿深之和稍长,在长度方向右侧设有与齿条B4b模数相同的直齿G9。在正常工况下,齿条限位块G4在压力弹簧G8的作用下向右伸出,直齿G9与齿条B4b的齿面脱离。在遭遇极端气象事件需要停机、波浪能收集部件处于高位时,左拉齿条限位块G4的拉环G6(兼做G4的右伸限位),使直齿G9与齿条B4b的齿面啮合并用插销G7锁定,保持波浪能收集部件停留在高位。在极端气象事件过后,用常备的起吊设备将波浪能收集部件逐个吊住,拔出插销G7、松开齿条限位块G4后将波浪能收集部件下降,使浮体B1降至水中即可恢复正常运行。
本装置采用缆绳锚泊定位,本实施例采用中国海洋大学研发的锚链张力腿式锚泊装置。
根据开发水域的条件,可以布置多套装置联网运行。
以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。