外置式非接触式扭矩传感器、组装系统及组装方法
文献发布时间:2023-06-19 11:00:24
技术领域
本发明涉及外置式非接触式扭矩传感器、组装系统及组装方法,具体地说,是一种电动助力转向系统用的用于测量扭矩的外置式非接触式位置传感器。
背景技术
汽车转向系统的性能对于确保车辆的安全驾驶、操纵稳定性和改善驾驶的舒适性等方面起到了重要的作用。在汽车的助力转向系统中,需要应用扭矩传感器测量转向系统中转向轴杆的转矩,助力转向控制器根据扭矩传感器的转矩输出信号确定转向助力的大小,控制器的输出信号控制执行机构实现助力转向的功能。对于电动助力转向系统而言,助力转向控制器根据转向轴杆的转矩的大小,控制助力电动机按控制器输出信号实现助力转向的功能,而扭矩的大小则由扭矩传感器进行测量。
通常按扭矩测量的传感器结构分类,将扭矩传感器分类成接触式和非接触式。然而,由于接触式扭矩传感器具有产生噪音以及耐久性较差的问题,所以目前优选的是非接触式扭矩传感器。对电动助力转向系统用的非接触式扭矩传感器而言,目前我们还没有见到有外置式非接触式扭矩传感器产品的报导。
在现有技术中,由中国专利CN101002078A所知说明了一种现有技术的非接触式扭矩传感器,其具有第一磁性转子结构,其由包含多个径向指向的沿相同外圆周均匀分布的磁体构成的外圆周充磁的多极磁环;第二定子结构,其包含两个环型磁轭,它们含有多个轴向指向的齿,两个环型磁轭的齿数相同,它们沿相同圆周均匀交错分布。
这种结构导致了两个环型磁轭的多个齿均匀的分布在多极磁环的外圆周,这导致了两个环型磁轭的齿面与磁轭环型平面呈90度设置。这种技术方案需要一种价格昂贵的导磁材料,增加了传感器机械结构的复杂度,导致了传感器成本的增加。这种内置式的非接触式扭矩传感器不方便拆装和更换。另外,这种内置式的非接触式传感器安装时,机械对中和电子对中操作复杂度高。
发明内容
针对上述现有非接触式扭矩传感器机械结构复杂、成本高、不方便拆装以及机械对中与电子对中不协调的问题,本发明提出了一种新的外置式非接触式扭矩传感器,以下可简称扭矩传感器或传感器。
为解决上述问题,本发明所采取的技术方案是:
本发明安装于电动助力转向系统壳体的外部;其包括扭矩转换角位移部件利用由转向管柱内设置的扭杆和滑块装置将转向轴的扭矩
进一步,角位移量α与转向轴的扭矩
α=karcsinT
其中
磁力产生部件是一个轴向端面充磁的磁体;磁力产生部件同轴设置于扭矩转换角位移部件的外端面;由根据所测扭矩的大小,扭矩转换角位移部件带动磁力产生部件与扭矩转换角位移部件同轴转动,即根据转向轴的扭矩
磁力感应元件是一个磁性感应元件;磁性感应元件根据磁力产生部件的转动角度产生对应的扭矩测量输出信号。
进一步,磁性感应元件与磁力产生部件的充磁平面平行;磁性感应元件与磁力产生部件的充磁平面的轴向设置有气隙。磁性感应元件可以是可编程器件,通过软件编程,可以将传感器的输出信号
V=hsinα
其中
一种外置式非接触式扭矩传感器的组装系统,用于组装外置式非接触式扭矩传感器;其包括具有承载传感器的载具组件的组装方法传送条带,以实现各个工位的衔接,在各个工位均设置有挡位挡杆,以阻挡载具组件的前行;
载具组件包括载具支座;在载具支座上旋转有载具翻转定位槽座,在载具翻转定位槽座上设置有载具下方组装方法孔,在载具翻转定位槽座上设置有载具固定挡板,在载具翻转定位槽座两端对向设置有载具端部对夹V型座,在载具端部对夹V型座上方联动设置有载具V座上压板;在摇臂上设置有摇臂组装方法豁口;
各工位包括以下工位,
摆臂组装工位,用于将摇臂放置到载具组件,并通过载具端部对夹V型座夹持摇臂两端外弧部;载具V座上压板及载具固定挡板下压摇臂的上表面,摇臂位于载具翻转定位槽座中;在组装摇臂后,载具翻转定位槽座旋转翻面;
弹片件组装工位,设置有机械手及对应送料通道,以将调隙弹簧片组装摇臂上;
轴承部组装工位,设置有机械手及对应送料通道,以将预装的轴承及轴承轴销组装到摇臂上,并通过阻挡端面挡盘及螺栓固定在轴承轴销上;
翻转工位,用于将载具翻转定位槽座再旋转翻面;
转轴组装工位,用于将转轴安装在摇臂上;
下压工位,具有下压机械头,以将转轴在摇臂上安装到位;
磁体组装工位,具有电磁吸附机械头,以将磁力产生部件安装在转轴端面上;
测试工位,具有机械手,还具有套装有滑环的试验机械轴,试验机械轴具有轴向移动和/或摆动副;
在滑环上设置有用于与轴承滚动接触的试验兼容斜面。
作为上述技术方案的进一步改进:
在摆臂组装工位上方竖直设置有摇臂下落通道;
在摇臂下落通道中层叠有摇臂,摇臂具有包容至少部分转轴外侧壁的外套,至少在外套一端具有外沿;摇臂外形为L型,摇臂具有用于容纳定位键部的键槽;
在摇臂下落通道外侧设置有摇臂驱动齿轮轴,在摇臂驱动齿轮轴上下两侧分别啮合有摇臂对合移动组件的摇臂移动齿条,以实现摇臂对合移动组件同步做反向运动;
在摇臂移动齿条上还通过齿轮组啮合传动有摇臂摆动齿轮轴,在摇臂摆动齿轮轴上设置有摆动下U型摆臂的根部;
在摇臂摆动齿轮轴上啮合有摇臂联动U型上齿条架;摇臂联动U型上齿条架高于摆动下U型摆臂,且摇臂联动U型上齿条架横向移动对合,以抱合位于的摇臂下落通道次底层的摇臂的外沿一侧的脖颈,摆动下U型摆臂下摆逐渐张开,以将最底层的摇臂下放到载具翻转定位槽座中;
当摇臂联动U型上齿条架对向靠近时,摆动下U型摆臂下摆;当摇臂联动U型上齿条架对向远离时,摆动下U型摆臂上摆,以承接与摇臂联动U型上齿条架分离而下落的次底层的摇臂。
在转轴组装工位上方竖直设置有预存有转轴的转轴下落通道;
在转轴下落通道下方两侧对向运动的反向移动侧壁,反向移动侧壁为两个且结构相同;
反向移动侧壁包括联动导向侧斜板;在联动导向侧斜板两侧分别设置有联动搓正侧立板及联动U型侧弧板;在联动U型侧弧板上方设置有联动高位托板,以托举转轴外侧的侧耳;
联动导向侧斜板,以将定位键部侧壁调整;
联动搓正侧立板,以将定位键部调整定位;
联动U型侧弧板,其抱合有形成用于竖直通过最低层的转轴的通道,同时,托举次底层的转轴。
一种外置式非接触式扭矩传感器组装组装方法,其具有承载传感器的载具组件的组装方法传送条带,以实现各个工位的衔接;包括以下步骤;
S1,摆臂组装工位,首先,将摇臂放置到载具翻转定位槽座中;然后,通过载具端部对夹V型座夹持摇臂两端外弧部;其次,载具V座上压板及载具固定挡板下压摇臂的上表面;再次,在组装摇臂后,载具翻转定位槽座旋转翻面;
S2,弹片件组装工位,将调隙弹簧片组装摇臂上;
S3,轴承部组装工位,将预装的轴承及轴承轴销组装到摇臂上,并通过阻挡端面挡盘及螺栓固定在轴承轴销上;
S4,翻转工位,将载具翻转定位槽座再旋转翻面;
S5,转轴组装工位,将转轴安装在摇臂上;
S6,下压工位,通过下压机械头将转轴在摇臂上安装到位;
S7,磁体组装工位,通过电磁吸附机械头将磁力产生部件安装在转轴端面上;
S8,测试工位,机械手控制试验机械轴进行模拟试验,通过配套的磁力感应元件采集信号。
作为上述技术方案的进一步改进:
在S1中,首先,当摇臂联动U型上齿条架对向靠近时,摆动下U型摆臂下摆;然后,当摇臂联动U型上齿条架对向远离时,摆动下U型摆臂上摆,以承接与摇臂联动U型上齿条架分离而下落的次底层的摇臂。
在S5中,首先,联动导向侧斜板,将定位键部侧壁调整;其次,联动搓正侧立板,将定位键部调整定位;再次,联动U型侧弧板其抱合有形成通道,使得最低层的转轴竖直通过,同时,联动高位托板托举转轴外侧的侧耳。
本发明的有益效果是:所述磁力产生部件的磁力线从N极出发通过磁力产生部件与磁力感应元件之间的气隙,穿过磁力感应元件,再通过磁力感应元件与磁力产生部件之间的气隙到达磁力产生部件的S极,构成了一个闭合的磁路。通过磁性感应元件检测磁力产生部件产生的磁力线角度,测量转向轴的扭矩。本发明设计合理、成本低廉、结实耐用、安全可靠、操作简单、省时省力、节约资金、结构紧凑且使用方便。
由于所述扭矩传感器结构简单,几何尺寸较小,从而降低了传感器的材料成本和制造成本。由于所述扭矩传感器是外置式的,从而传感器的拆装和更换非常方便。由于所述扭矩传感器是外置式的以及所述磁性感应元件是一个可编程器件,从而扭矩传感器的机械对中和电子对中可以独立设置。
附图说明
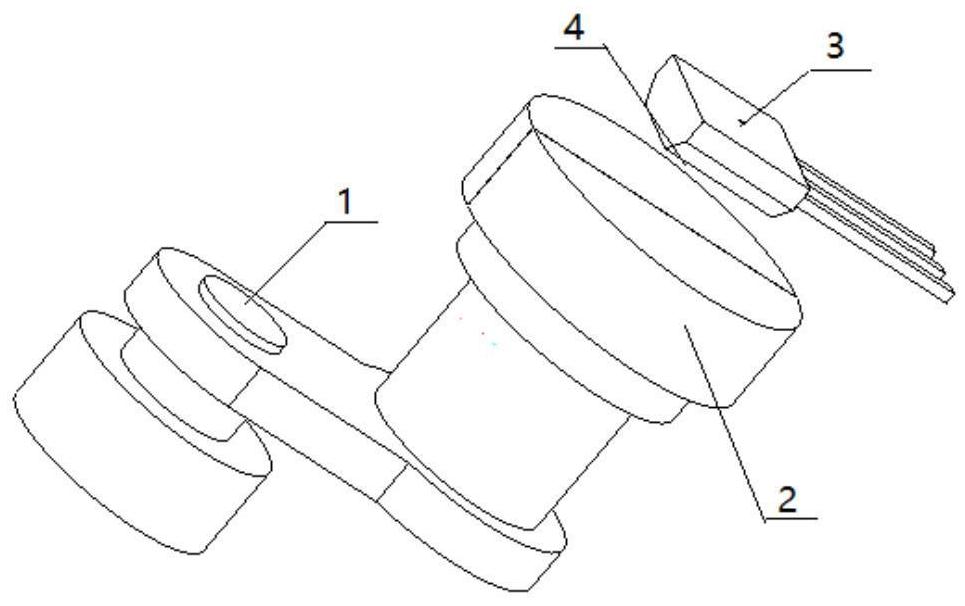
附图1为本发明的结构示意图;
附图2为本发明的扭矩转换角位移部件的结构示意图一;
附图3为本发明的磁力产生部件的结构示意图二;
附图4为磁力产生部件2的转角为零的转向轴扭矩的测量原理。
附图5为磁力产生部件2逆时针转动时,转向轴扭矩的测量原理。
附图6为磁力产生部件2顺时针转动时,转向轴扭矩的测量原理。
图7是本发明的传感器局部安装结构示意图。
图8是本发明的安装结构示意图。
图9是本发明的组装使用结构局部示意图一。
图10是本发明的组装使用结构示意图二。
图11是本发明的载具结构示意图。
图12是本发明的摇臂组装结构示意图。
图13是本发明的转轴组装使用结构示意图。
图14是本发明的试验结构示意图。
其中:1、扭矩转换角位移部件;2、磁力产生部件;3、磁力感应元件;4、气隙;5、滑环;6、磁力感应元件编程器;7、锥面滚套;8、阻挡端面挡盘;9、调隙弹簧片;10、定位键部;11、轴承;12、轴承轴销;13、摇臂;14、转轴;15、组装方法传送条带;16、摆臂组装工位;17、弹片件组装工位;18、轴承部组装工位;19、翻转工位;20、转轴组装工位;21、下压工位;22、磁体组装工位;23、测试工位;24、载具组件;25、挡位挡杆;26、载具支座;27、载具翻转定位槽座;28、载具下方组装方法孔;29、载具固定挡板;30、载具端部对夹V型座;31、载具V座上压板;32、摇臂下落通道;33、摇臂驱动齿轮轴;34、摇臂对合移动组件;35、摇臂移动齿条;36、摇臂摆动齿轮轴;37、摆动下U型摆臂;38、摇臂联动U型上齿条架;39、转轴下落通道;40、反向移动侧壁;41、联动搓正侧立板;42、联动导向侧斜板;43、联动U型侧弧板;44、联动高位托板;45、下压机械头;46、电磁吸附机械头;47、试验机械轴;48、试验兼容斜面;49、摇臂组装方法豁口。
具体实施方式
如图1-14所示,本实施例的外置式非接触式扭矩传感器的组装系统,用于组装外置式非接触式扭矩传感器;其包括具有承载传感器的载具组件24的组装方法传送条带15,以实现各个工位的衔接,在各个工位均设置有挡位挡杆25,以阻挡载具组件24的前行;
载具组件24包括载具支座26;在载具支座26上旋转有载具翻转定位槽座27,在载具翻转定位槽座27上设置有载具下方组装方法孔28,在载具翻转定位槽座27上设置有载具固定挡板29,在载具翻转定位槽座27两端对向设置有载具端部对夹V型座30,在载具端部对夹V型座30上方联动设置有载具V座上压板31;在摇臂13上设置有摇臂组装方法豁口49;
各工位包括以下工位,
摆臂组装工位16,用于将摇臂13放置到载具组件24,并通过载具端部对夹V型座30夹持摇臂13两端外弧部;载具V座上压板31及载具固定挡板29下压摇臂13的上表面,摇臂13位于载具翻转定位槽座27中;在组装摇臂13后,载具翻转定位槽座27旋转翻面;
弹片件组装工位17,设置有机械手及对应送料通道,以将调隙弹簧片9组装摇臂13上;
轴承部组装工位18,设置有机械手及对应送料通道,以将预装的轴承11及轴承轴销12组装到摇臂13上,并通过阻挡端面挡盘8及螺栓固定在轴承轴销12上;
翻转工位19,用于将载具翻转定位槽座27再旋转翻面;
转轴组装工位20,用于将转轴14安装在摇臂13上;
下压工位21,具有下压机械头45,以将转轴14在摇臂13上安装到位;
磁体组装工位22,具有电磁吸附机械头46,以将磁力产生部件2安装在转轴14端面上;
测试工位23,具有机械手,还具有套装有滑环5的试验机械轴47,试验机械轴47具有轴向移动和/或摆动副;
在滑环5上设置有用于与轴承11滚动接触的试验兼容斜面48。
在摆臂组装工位16上方竖直设置有摇臂下落通道32;
在摇臂下落通道32中层叠有摇臂13,摇臂13具有包容至少部分转轴14外侧壁的外套,至少在外套一端具有外沿;摇臂13外形为L型,摇臂13具有用于容纳定位键部10的键槽;
在摇臂下落通道32外侧设置有摇臂驱动齿轮轴33,在摇臂驱动齿轮轴33上下两侧分别啮合有摇臂对合移动组件34的摇臂移动齿条35,以实现摇臂对合移动组件34同步做反向运动;
在摇臂移动齿条35上还通过齿轮组啮合传动有摇臂摆动齿轮轴36,在摇臂摆动齿轮轴36上设置有摆动下U型摆臂37的根部;
在摇臂摆动齿轮轴36上啮合有摇臂联动U型上齿条架38;摇臂联动U型上齿条架38高于摆动下U型摆臂37,且摇臂联动U型上齿条架38横向移动对合,以抱合位于的摇臂下落通道32次底层的摇臂13的外沿一侧的脖颈,摆动下U型摆臂37下摆逐渐张开,以将最底层的摇臂13下放到载具翻转定位槽座27中;
当摇臂联动U型上齿条架38对向靠近时,摆动下U型摆臂37下摆;当摇臂联动U型上齿条架38对向远离时,摆动下U型摆臂37上摆,以承接与摇臂联动U型上齿条架38分离而下落的次底层的摇臂13。
在转轴组装工位20上方竖直设置有预存有转轴14的转轴下落通道39;
在转轴下落通道39下方两侧对向运动的反向移动侧壁40,反向移动侧壁40为两个且结构相同;
反向移动侧壁40包括联动导向侧斜板42;在联动导向侧斜板42两侧分别设置有联动搓正侧立板41及联动U型侧弧板43;在联动U型侧弧板43上方设置有联动高位托板44,以托举转轴14外侧的侧耳;
联动导向侧斜板42,以将定位键部10侧壁调整;
联动搓正侧立板41,以将定位键部10调整定位;
联动U型侧弧板43,其抱合有形成用于竖直通过最低层的转轴14的通道,同时,托举次底层的转轴14。
本实施例的外置式非接触式扭矩传感器组装组装方法,其具有承载传感器的载具组件24的组装方法传送条带15,以实现各个工位的衔接;包括以下步骤;S1,摆臂组装工位16,首先,将摇臂13放置到载具翻转定位槽座27中;然后,通过载具端部对夹V型座30夹持摇臂13两端外弧部;其次,载具V座上压板31及载具固定挡板29下压摇臂13的上表面;再次,在组装摇臂13后,载具翻转定位槽座27旋转翻面;
S2,弹片件组装工位17,将调隙弹簧片9组装摇臂13上;
S3,轴承部组装工位18,将预装的轴承11及轴承轴销12组装到摇臂13上,并通过阻挡端面挡盘8及螺栓固定在轴承轴销12上;
S4,翻转工位19,将载具翻转定位槽座27再旋转翻面;
S5,转轴组装工位20,将转轴14安装在摇臂13上;
S6,下压工位21,通过下压机械头45将转轴14在摇臂13上安装到位;
S7,磁体组装工位22,通过电磁吸附机械头46将磁力产生部件2安装在转轴14端面上;
S8,测试工位23,机械手控制试验机械轴47进行模拟试验,通过配套的磁力感应元件3采集信号。
在S1中,首先,当摇臂联动U型上齿条架38对向靠近时,摆动下U型摆臂37下摆;然后,当摇臂联动U型上齿条架38对向远离时,摆动下U型摆臂37上摆,以承接与摇臂联动U型上齿条架38分离而下落的次底层的摇臂13。
在S5中,首先,联动导向侧斜板42,将定位键部10侧壁调整;其次,联动搓正侧立板41,将定位键部10调整定位;再次,联动U型侧弧板43其抱合有形成通道,使得最低层的转轴14竖直通过,同时,联动高位托板44托举转轴14外侧的侧耳。
作为一种优选的实施方式,磁性感应元件是一个可编程器件,在安装外置式非接触式扭矩传感器时,只需调节机械对中,电子对中和传感器的线性化输入输出特性通过软件编程实现。具体如下:
图1示出了本发明的传感器结构的视图。如图1所示,该非接触式扭矩传感器安装于电动助力转向系统壳体的外部,其包括扭矩转换角位移部件1、磁力产生部件2及磁力感应元件3。磁力产生部件2和磁力感应元件3之间设置有气隙4。
图2示出了扭矩转换角位移部件1结构的视图。如图2所示,该扭矩转换角位移部件包括轴承11,轴承轴销12,摇臂13和转轴14。
图3示出了磁力产生部件2结构的视图。如图3所示,该磁力产生部件2为端面两极充磁的圆柱形磁体。
扭矩转换角位移部件1的转轴14和磁力产生部件2同轴安装或固定于同一个非导磁材料的骨架上,磁力产生部件2的充磁端面和磁力感应元件3之间设置有气隙4。
磁力产生部件2的磁力线从N极出发通过磁力产生部件2与磁力感应元件3之间的气隙4,穿过磁力感应元件3,再通过磁力感应元件3与磁力产生部件2之间的气隙4到达磁力产生部件2的S极,构成了一个闭合的磁路。磁感应元件3实时地接收闭合的磁路中磁力线的方向变化量,以此测量转向轴的两个轴杆(输出轴和输入轴)的扭矩。
图4和图5和6示出了所要求保护的传感器的磁力产生及磁力线传导部分的几何结构以及主要部件之间磁力变化关系的示意性视图。
图4示出了扭矩转换角位移部件1的转角为零的情形,相应的磁力产生部件1产生的磁力线方向相对于磁力感应元件3相对旋转角度为零。在此情形下,磁力感应元件3输出逻辑信号为零,此时对应转向轴扭矩为零。
图5示出了扭矩转换角位移部件1的轴承11向下移动,由此使得扭矩转换角位移部件1的转轴14逆时针旋转,相应的磁力产生部件2产生的磁力线方向相对于磁力感应元件3旋转角度大于(小于)零。在此情形下,磁力感应元件3的逻辑输出信号为正(负)值,此时对应转向轴扭矩大于(小于)零,即为方向盘向左(右)旋转产生转向轴轴扭矩大于(小于)零的情形,其中磁力产生部件2产生的磁力线方向相对于磁力感应元件3旋转角度相对于磁力感应元件3的逻辑输出信号成正比。
图6示出了扭矩转换角位移部件1的轴承11向上移动,由此使得扭矩转换角位移部件1的转轴14顺时针旋转,相应的磁力产生部件2产生的磁力线方向相对于磁力感应元件3旋转角度小于(大于)零。在此情形下,磁力感应元件3的逻辑输出信号为负(正)值,此时对应转向轴扭矩小于(大于)零,即为方向盘向右(左)旋转产生转向轴轴扭矩小于(大于)零的情形,其中磁力产生部件2产生的磁力线方向相对于磁力感应元件3旋转角度相对于磁力感应元件3的逻辑输出信号成正比。
图7示出了本发明的传感器安装结构的视图。如图7所示,安装该外置式非接触式扭矩传感器时,第一步将扭矩转换角位移部件1的轴承11插入转向管柱中的滑环5的圆环槽内,第二步转动扭矩转换角位移部件1至机械零点位置,并拧紧螺栓将传感器固定安装于电动助力转向系统壳体的外部,完成传感器的安装和机械对中,第三步将磁力感应元件3的引脚接于磁力感应元件编程器6,启动编程操作实现传感器的线性化输入输出特性和电子零点(电子对中)标定。
本发明通过组装方法传送条带15实现了各个工位的连接,实现自动化组装。其中,摆臂组装工位16、转轴组装工位20实现了逐个上料,设计巧妙,节约空间,驱动动力少。
本发明通过弹片件组装工位17,轴承部组装工位18,翻转工位19,下压工位21,磁体组装工位22,测试工位23,实现了自动化流线作业,通过载具组件24实现定位与双面组装,挡位挡杆25实现纵向定位,载具端部对夹V型座30,载具V座上压板31实现对中定位,摆动下U型摆臂37,摇臂联动U型上齿条架38实现快速往复移动与摆动往复的组合,反向移动侧壁40,联动搓正侧立板41,联动导向侧斜板42,实现了自动找正定位,为了补充摆动与移动的差速问题,通过U型实现动作延时补充,设计巧妙。试验机械轴47模拟各种工况,试验兼容斜面48,从而增加通用性,消除间隙误差。
- 外置式非接触式扭矩传感器、组装系统及组装方法
- 多轴线力和扭矩传感器的组及组装方法