环卫车辆线控上装的远程控制系统和方法
文献发布时间:2023-06-19 11:22:42
技术领域
本发明涉及环卫车辆控制技术领域,尤其涉及环卫车辆线控上装的远程控制系统和方法。
背景技术
随着经济发展和国家建设的需求,环卫保洁在国民经济建设和日常生活中的作用日益重要,而现有的环卫车辆驾驶方式多为人工直接驾驶,存在工作环境恶劣,安全性差,驾驶员劳动强度大等问题;且在目前L5等级自动驾驶难以完全实现的情况下,L3/L4等级的环卫车辆在自动驾驶运行过程中,有特殊情况下需要人工介入接管,使车辆远程驾驶有充分的发展空间,但目前环卫车辆的上装多是人工手动控制,无法适应远程驾驶车辆的需求。
发明内容
本发明的目的在于提供环卫车辆线控上装的远程控制系统和方法,改善环卫工作人员作业环境,降低意外事故率,弥补环卫车辆在远程驾驶过程中的不足,增加环卫车辆在远程驾驶时的解决方案,为无人驾驶环卫车辆的智能化发展储备、奠定技术路线基础,促进环卫装备的市场销售与推广,提升环卫产品的竞争力。
本发明采用的技术方案是:
环卫车辆线控上装的远程控制系统,包括远程控制装置以及安装在环卫车辆上的5G通信模块、感知装置、车端通信模块、环卫车辆ECU和环卫车辆线控上装;
环卫车辆ECU分别连接环卫车辆线控上装和车端通信模块,环卫车辆ECU用于处理车辆信息并发出控制指令给环卫车辆线控上装;环卫车辆线控上装通过CAN总线与环卫车辆ECU相连接,并执行相应的控制指令;车端通信模块通过5G通信模块和远程控制装置通讯连接,车端通信模块用于接收所述远程控制装置发出的控制指令,并将指令转换输出给ECU;5G通信模块用于车端通信模块与远程控制装置的数据传输;感知装置连接5G通信模块并通过5G通信模块实时将车身周围状态发送至远程控制装置;远程控制装置包括数字服务器以及与数字服务器连接的显示屏和控制台,数字服务器将感知装置回传的信息进行图像处理和数据运算后输出,显示屏实时显示所述数字服务器输出的信息,驾驶员通过获取的信息在控制台上操作输出相应控制指令。
进一步地,作为一种较优实施方式,所述感知装置包括设置在环卫车辆驾驶室及箱体周围的若干个摄像头。
进一步地,作为一种较优实施方式,5G通信模块和车端通信模块固定于环卫车辆的驾驶室内,车端通信模块通过驾驶室内局域网和CAN总线分别与所述5G通信模块和环卫车辆ECU相连接。
进一步地,作为一种较优实施方式,环卫车辆ECU置于环卫车辆底盘整车控制器中。
进一步地,作为一种较优实施方式, 环卫车辆线控上装包括清洗扫路上装和压缩垃圾上装。
环卫车辆线控上装的远程控制方法,其包括以下步骤:
步骤1,远程控制装置下发连接指令至环卫车辆并发出需人工介入信号;
步骤2,环卫车辆确认远程控制装置发出的连接信号并接受远程接管;
步骤3,感知装置收集车身周围信息,经5G通信模块发送至远程控制装置;
步骤4,驾驶员通过远程驾驶装置的显示屏获取数字服务器处理过的信息,并根据相应的信息在控制台上操作对应的指令,控制台输出指令信息至5G通信模块下发车端通信模块;
步骤5,车端通信模块收到指令处理后将信息发送至环卫车辆ECU,以控制环卫车辆线控上装作出相应动作,完成环卫作业。
进一步地,作为一种较优实施方式,步骤1中环卫车辆包括普通运营环卫车辆或无人驾驶运行环卫车辆。
进一步地,作为一种较优实施方式,步骤3中感知装置的若干高清摄像头输出的多个图像画面信号通过交换机整合成单路信号经5G通信模块发送至所述远程控制装置。
本发明采用以上技术方案,可配合远程驾驶,实现解决行业一线从业人员招聘难的痛点,提高环卫人员工作环境舒适性,降低意外事故率,节约人力成本,实现环卫装备安全、有效、可靠的远程控制,并为环卫装备向更高层次的智能化发展储备、奠定相关技术基础,大幅提升公司产品的竞争力,并产生更加积极的品牌效应。
附图说明
以下结合附图和具体实施方式对本发明做进一步详细说明;
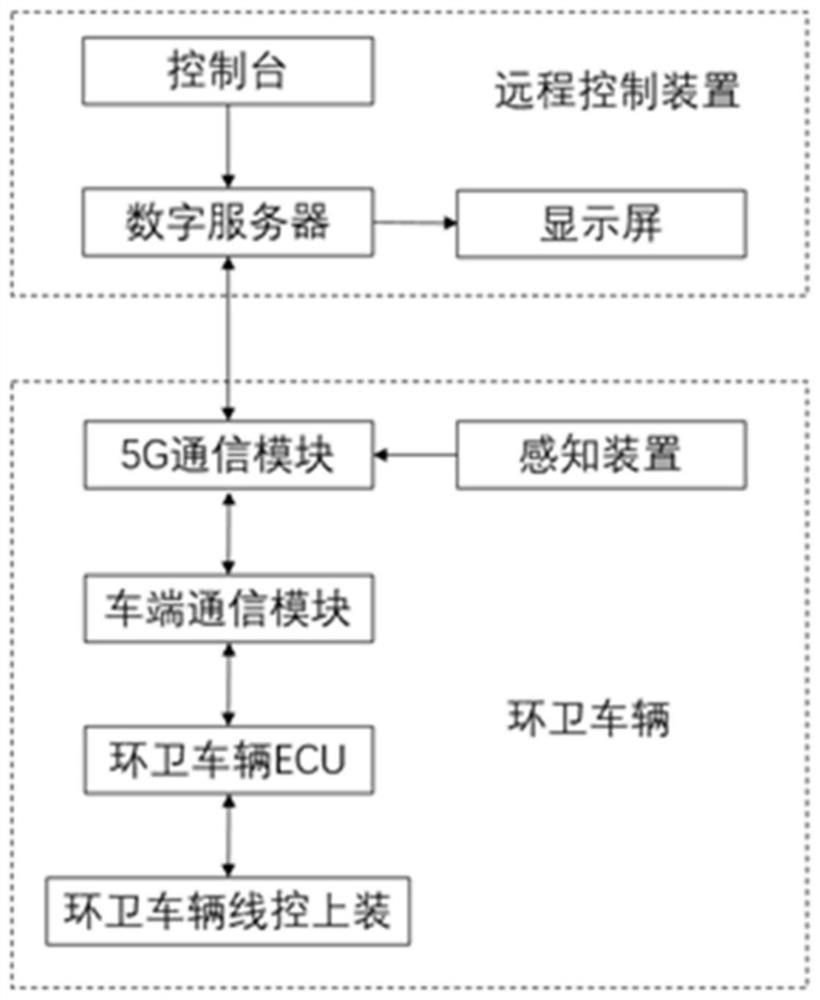
图1为本发明环卫车辆线控上装的远程控制系统的结构示意图;
图2为本发明以环卫扫路机的具体原理示意图。
具体实施方式
为使本申请实施例的目的、技术方案和优点更加清楚,下面将结合本申请实施例中的附图对本申请实施例中的技术方案进行清楚、完整地描述。
如图1所示,本发明公开了环卫车辆线控上装的远程控制系统,包括远程控制装置以及安装在环卫车辆上的5G通信模块、感知装置、车端通信模块、环卫车辆ECU和环卫车辆线控上装;
环卫车辆ECU分别连接环卫车辆线控上装和车端通信模块,环卫车辆ECU用于处理车辆信息并发出控制指令给环卫车辆线控上装;环卫车辆线控上装通过CAN总线与环卫车辆ECU相连接,并执行相应的控制指令;车端通信模块通过5G通信模块和远程控制装置通讯连接,车端通信模块用于接收所述远程控制装置发出的控制指令,并将指令转换输出给ECU;5G通信模块用于车端通信模块与远程控制装置的数据传输;感知装置连接5G通信模块并通过5G通信模块实时将车身周围状态发送至远程控制装置;远程控制装置包括数字服务器以及与数字服务器连接的显示屏和控制台,数字服务器将感知装置回传的信息进行图像处理和数据运算后输出,显示屏实时显示所述数字服务器输出的信息,驾驶员通过获取的信息在控制台上操作输出相应控制指令。
进一步地,作为一种较优实施方式,所述感知装置包括设置在环卫车辆驾驶室及箱体周围的若干个摄像头。
进一步地,作为一种较优实施方式,5G通信模块和车端通信模块固定于环卫车辆的驾驶室内,车端通信模块通过驾驶室内局域网和CAN总线分别与所述5G通信模块和环卫车辆ECU相连接。
进一步地,作为一种较优实施方式,环卫车辆ECU置于环卫车辆底盘整车控制器中。
进一步地,作为一种较优实施方式, 环卫车辆线控上装包括清洗扫路上装和压缩垃圾上装。
环卫车辆线控上装的远程控制方法,其包括以下步骤:
步骤1,远程控制装置下发连接指令至环卫车辆并发出需人工介入信号;
步骤2,环卫车辆确认远程控制装置发出的连接信号并接受远程接管;
步骤3,感知装置收集车身周围信息,经5G通信模块发送至远程控制装置;
步骤4,驾驶员通过远程驾驶装置的显示屏获取数字服务器处理过的信息,并根据相应的信息在控制台上操作对应的指令,控制台输出指令信息至5G通信模块下发车端通信模块;
步骤5,车端通信模块收到指令处理后将信息发送至环卫车辆ECU,以控制环卫车辆线控上装作出相应动作,完成环卫作业。
进一步地,作为一种较优实施方式,步骤1中环卫车辆包括普通运营环卫车辆或无人驾驶运行环卫车辆。
进一步地,作为一种较优实施方式,步骤3中感知装置的若干高清摄像头输出的多个图像画面信号通过交换机整合成单路信号经5G通信模块发送至所述远程控制装置。
本发明采用以上技术方案,可配合远程驾驶,实现解决行业一线从业人员招聘难的痛点,提高环卫人员工作环境舒适性,降低意外事故率,节约人力成本,实现环卫装备安全、有效、可靠的远程控制,并为环卫装备向更高层次的智能化发展储备、奠定相关技术基础,大幅提升公司产品的竞争力,并产生更加积极的品牌效应。
下面扫路机为例子对工作原理作详细说明:
如图2所示,环卫车辆为环卫扫路机时,所述的环卫扫路机线控上装远程控制系统主要包括远程控制装置、5G CPE、若干高清摄像头、车端通信模块、扫路机ECU、扫路机控制器、作业装置等。所述远程控制装置包括数字服务器,显示屏,控制台等,所述数字服务器将所述若干高清摄像头回传的信息进行图像处理,数据运算后输出至显示屏,所述显示屏实时显示所述数字服务器输出的视频信息,驾驶员查看视频观察地面是否需要清扫,并在所述控制台上操作对应需使用的作业装置开关,输出相应控制指令;所述5G CPE固定于所述环卫车辆的驾驶室内,分别通过无线局域网和5G信号与所述车端通信模块和所述远程控制装置相连接,用于实现所述车端通信模块与所述远程控制装置的数据传输;所述若干高清摄像头输出的多个图像画面信号通过交换机整合成单路信号经5G CPE发送至所述远程控制装置;所述车端通信模块同样置于所述环卫车辆的驾驶室内,通过无线局域网和CAN总线分别与所述5G CPE和所述扫路机ECU相连接,用于接收所述远程控制装置发出的控制指令,并将指令转换输出给所述扫路机ECU;所述扫路机ECU置于扫路机底盘整车控制器中,用于读取车辆实时状态信息,发出控制指令给所述扫路机控制器;所述扫路机控制器通过CAN总线与所述扫路机作业装置的控制元件(液压系统电磁阀,电机控制器等)相连接,输出控制信号;所述扫路机作业装置包括扫盘、吸嘴、水泵等,用于执行相应的控制指令。
经过不断调试验证,本发明提出的环卫车辆线控上装的远程控制系统和方法可稳定可靠的进行控制,并按控制指令要求完成扫路机的各项作业动作,达到预期效果,良好的操作环境大幅提升驾驶员的驾驶体验感,提高环卫装备的智能化附加值,大幅提升公司产品的竞争力,为环卫产品的后市场服务奠定基础,并产生更加积极的品牌效应。
本发明采用以上技术方案,可配合远程驾驶,实现解决行业一线从业人员招聘难的痛点,提高环卫人员工作环境舒适性,降低意外事故率,节约人力成本,实现环卫装备安全、有效、可靠的远程控制,并为环卫装备向更高层次的智能化发展储备、奠定相关技术基础,大幅提升公司产品的竞争力,并产生更加积极的品牌效应。
显然,所描述的实施例是本申请一部分实施例,而不是全部的实施例。在不冲突的情况下,本申请中的实施例及实施例中的特征可以相互组合。通常在此处附图中描述和示出的本申请实施例的组件可以以各种不同的配置来布置和设计。因此,本申请的实施例的详细描述并非旨在限制要求保护的本申请的范围,而是仅仅表示本申请的选定实施例。基于本申请中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本申请保护的范围。
- 环卫车辆线控上装的远程控制系统和方法
- 一种环卫车辆上装作业系统自动启停的方法及装置