负荷减少设备、负荷减少方法和存储程序的存储介质
文献发布时间:2023-06-19 11:35:49
技术领域
本发明涉及负荷减少设备、负荷减少方法和存储程序的存储介质。
背景技术
已知一种负荷减少设备,其通过被用户穿着而执行诸如用户的步行运动之类的负荷的辅助,并且减轻由用户携带的行李的负荷。当人可穿着时,负荷减少设备有时被称为动力套装。
一些动力套装通过从致动器输出转矩来辅助肌肉力量,从而通过驱动设置在用户腿上的连杆机构来辅助步行运动。专利文献1公开了一种基于关节角度来计算用于驱动致动器的转矩值的技术。
引文列表
专利文献
[专利文献1]
日本未审查专利申请公开No.2017-136658
发明内容
本发明要解决的问题
在诸如动力套装的负荷减少设备中,需要根据用户的运动的动量顺序地改变负荷减少所需的转矩。这样,在负荷减少设备中,期望针对用户的动作进行更适当的负荷减少。
因此,本发明的示例目的是提供一种能够解决上述问题的负荷减少设备、负荷减少方法以及存储程序的存储介质。
解决问题的手段
根据本发明的第一方面,一种负荷减少设备包括:地面反作用力负荷差计算单元,其被配置为以基于用户的重量和所述负荷减少设备的重量的重量被传递到地面接触表面的第一测量值和基于所述用户的所述重量的重量被传递到所述地面接触表面的第二测量值为基础,来计算地面反作用力负荷差,所述地面反作用力负荷差是用户的负荷减轻的量,所述负荷减少设备减少所述用户的负荷并且具有保持行李的机构,并且所述负荷减少设备至少由用户穿着;以及转矩控制单元,其被配置为基于所述地面反作用力负荷差来控制由所述负荷减少设备的驱动机构输出的转矩,以减小在所述用户的每条腿的关节处的所述用户上的负荷。
根据本发明的第二方面,一种负荷减少方法包括:以基于用户的重量和所述负荷减少设备的重量的重量被传递到地面接触表面的第一测量值和基于所述用户的所述重量的重量被传递到所述地面接触表面的第二测量值为基础,来计算地面反作用力负荷差,所述地面反作用力负荷差是用户的负荷减轻的量,所述负荷减少设备减少所述用户上的负荷并且具有保持行李的机构,并且所述负荷减少设备至少由用户穿着;以及,以所述地面反作用力负荷差为基础,来控制由所述负荷减少设备的驱动机构输出的转矩,以减小在所述用户的每条腿的关节处的所述用户上的负荷。
根据本发明的第三方面,一种存储在存储介质中的程序使负荷减少设备的计算机执行处理,该处理包括:以基于用户的重量和所述负荷减少设备的重量的重量被传递到地面接触表面的第一测量值和基于所述用户的所述重量的重量被传递到所述地面接触表面的第二测量值为基础,来计算地面反作用力负荷差,所述地面反作用力负荷差是用户的负荷减轻的量,所述负荷减少设备减少所述用户上的负荷并且具有保持行李的机构,并且所述负荷减少设备至少由用户穿着;以及,以所述地面反作用力负荷差为基础,来控制由所述负荷减少设备的驱动机构输出的转矩,以减小在所述用户的每条腿的关节处的所述用户上的负荷。
发明的有益效果
本发明可以提供一种能够针对用户的动作进行更适当的负荷减少的负荷减少设备。
附图说明
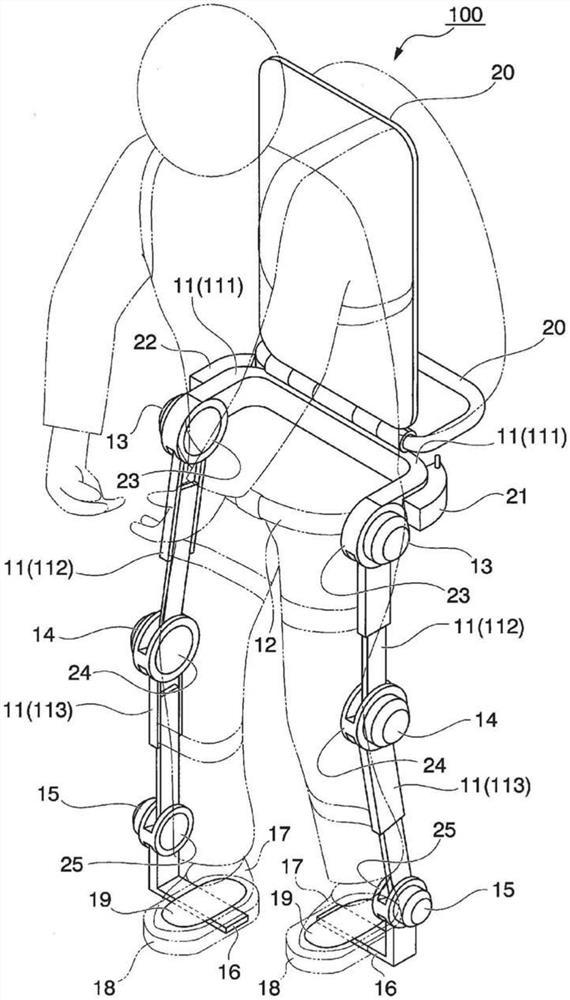
图1是示出根据本发明的实施例的动力套装的配置的图。
图2是示出根据本发明的实施例的鞋底负荷传感器和脚底负荷传感器之间的布置关系的第一图。
图3是示出根据本发明的实施例的鞋底负荷传感器和脚底负荷传感器之间的布置关系的第二图。
图4是示出根据本发明实施例的鞋底负荷传感器和脚底负荷传感器的面积之间的关系的图。
图5是示出根据本发明的实施例的负荷传感器的概要的图。
图6是示出根据本发明的实施例的控制设备的硬件配置的图。
图7是根据本发明实施例的控制设备的功能框图。
图8是示出根据本发明实施例的控制设备的操作的操作框图。
图9是示出根据本发明的实施例的地面反作用力负荷差的示例的图。
图10是示出根据本发明的实施例的动力套装的处理流程的图。
图11是示出根据本发明的实施例的鞋底负荷传感器和脚底负荷传感器的另一布置示例的图。
图12是示出根据本发明的实施例的鞋底负荷传感器和脚底负荷传感器的另一布置示例的图。
图13是示出根据本发明实施例的控制设备的最小配置的图。
具体实施方式
以下,将参照附图描述根据本发明的实施例的负荷减少设备、负荷减少方法和存储程序的存储介质。
图1是示出根据本实施例的动力套装的配置的图。
动力套装100是负荷减少设备的一个方面。动力套装100由骨架部分11、皮带12、髋致动器13、膝致动器14、踝致动器15、鞋底板16、脚用束带17、鞋底负荷传感器18(第一测量单元)、脚底负荷传感器19(第二测量单元)、装载平台20、控制设备21、电池22、髋关节传感器23、膝关节传感器24、踝关节传感器25等构成。作为示例,骨架部分11大致分为第一骨架部分111、第二骨架部分112和第三骨架部分113。
如图1所示,动力套装100在一个示例中被配置如下以支撑装载平台20,该装载平台20是用于支持行李的机构的一方面。即,动力套装100具有第一骨架部分111,并且在左右髋致动器13处可旋转地联接到第一骨架部分111和第二骨架部分112,第一骨架部分111和第二骨架部分112分别对应于穿着动力套装100的用户的左或右大腿部分。左右膝致动器14可旋转地联接到穿着动力套装100的用户的左侧或右侧的相应的第二骨架部分112,并且可旋转地联接到沿着穿着动力套装100的用户左或右小腿部分对应的第三骨架部分113。踝关节致动器15可旋转地联接到左侧或右侧的相应的第三骨架部分113,并且相应的鞋底板16被设置在穿着动力套装100的用户的左侧或右侧在脚背带17的下侧。髋致动器13、膝致动器14和踝致动器15是驱动机构,该驱动机构输出减小在用户的每条腿的每个关节处的用户负荷的转矩。
髋关节传感器23安装在髋致动器13中,并且通过编码器检测髋关节角度,即,第一骨架部分111和第二骨架部分112之间形成的角度。膝关节传感器24安装在膝致动器14中,并且通过编码器检测膝关节角度,即,第二骨架部分112与第三骨架部分113之间的角度。踝关节传感器25安装在踝致动器15中,并且通过编码器检测踝关节角度,即,第三骨架部分113与鞋底板16之间的角度。髋关节传感器23、膝关节传感器24和踝关节传感器25检测用户的每条腿的每个关节的角度(以下称为“关节角度”)。
穿着动力套装100的用户将他/她的左脚和右脚附接到相应的脚用束带具17,并且利用皮带12将第一骨架部分111固定到腰部,使得第一骨架部分111紧密地附接到腰部。动力套装100具有经由骨架部分11和髋致动器13、膝致动器14和踝致动器15而与脚底接触,从而将行李的大部分负荷和动力套装100的负荷释放到地面的结构。用户接通动力套装100的控制设备21。控制设备21控制髋致动器13、膝致动器14和踝致动器15以经由骨架部分11和髋致动器13、膝致动器14和踝致动器15向行走表面传递尽可能多的设备重量,该设备重量是在装载平台20上装载的行李的负荷与动力套装100的重量之和。由此,动力套装100减少了负担,诸如是穿着动力套装100并执行各种操作的用户的行李的负荷。
图2是示出在鞋底负荷传感器与脚底负荷传感器之间的配置关系的第一图。
图3是示出在鞋底负荷传感器与脚底负荷传感器之间的配置关系的第二图。
图2示出了当从脚跟方向上视觉识别图1的右脚脚用束带17和每个传感器时的视图。图3示出了当从大腿内侧方向上视觉识别图2的右脚脚用束带17和每个传感器时的视图。如图2和3所示,鞋底负荷传感器18设置在与用户所穿着的鞋子相对应的脚用束带17的底部(鞋底)上。鞋底负荷传感器18设置在鞋底板16的地面接触表面侧(其将动力套装100和行李的重量F传递到地面接触表面)和脚用束带17(其将用户的重量传递到地面接触表面),从而覆盖鞋底板16和脚用束带17的整个后表面。脚底负荷传感器19设置在脚用束带17中以便覆盖脚底的整个表面,使得能够测量从用户的脚底所施加的重量。脚底负荷传感器19可以设置在脚用束带17的内底和鞋底板16之间。
图4是示出鞋底负荷传感器和脚底负荷传感器的面积之间的关系的图。
图4是当从上方视觉识别脚用束带17、鞋底负荷传感器18和脚底负荷传感器19时的视图。如该图所示,鞋底负荷传感器18具有覆盖脚用束带17和鞋底板16的整个地面接触表面(下侧)的面积。另外,脚底负荷传感器19设置在脚用束带17内部以便覆盖脚的整个下侧。如图4所示,在一个示例中,鞋底板16被设置成在鞋底负荷传感器18的宽度方向上被夹在脚用束带17和鞋底负荷传感器18之间。
图5是示出负荷传感器的概览的图。
如图5中的示例所示,电极以矩阵形式布置在鞋底负荷传感器18和脚底负荷传感器19中的薄片状绝缘体的正面和背面上。鞋底负荷传感器18和脚底负荷传感器19测量电极的网格点的电阻,并将测量值输出到控制设备21。控制设备21基于每个网格点的电阻值计算施加到每个网格点的压力以及在传感器片整个表面上的负荷。图5示出了脚底负荷传感器19。
图6是示出控制设备的硬件配置的图。
如该图所示,控制设备21是配备有诸如CPU(中央处理单元)101、ROM(只读存储器)102、RAM(随机存取存储器)103、信号输入/输出设备104和无线通信设备105的硬件的计算机。
信号输入/输出设备104输入从鞋底负荷传感器18、脚底负荷传感器19、髋关节传感器23、膝关节传感器24以及踝关节传感器25输出的信号。信号输入/输出设备104输出用于控制髋致动器13、膝致动器14和踝致动器15的控制信号。控制设备21通过从电池22提供的电力进行操作。
无线通信设备105可以与另一设备通信地连接。
图7是控制设备的功能框图。
当电源按钮被打开时,基于从电池22供应的电力来激活控制设备21。启动后,控制设备21执行控制程序。结果,控制设备21至少具有信息获取单元211、集成控制单元212、致动器控制单元213、电源单元214和存储单元215的功能配置。
信息获取单元211从鞋底负荷传感器18、脚底负荷传感器19、髋关节传感器23、膝关节传感器24和踝关节传感器25获取感测信息。鞋底负荷传感器18的感测信息是鞋底负荷信息,其指示与使用图5描述的每个格点处的压力(负荷)相对应的电阻值。脚底负荷传感器19的感测信息是脚底负荷信息,其指示与每个格点的压力(负荷)相对应的电阻值。髋关节传感器23、膝关节传感器24和踝关节传感器25的感测信息是指示检测到的关节角度的关节角度信息。
致动器控制单元213控制髋致动器13、膝致动器14和踝致动器15。
当电源按钮被打开时,电源单元214将来自电池22的电力提供给控制设备21的每个部分。
存储单元215存储腿的每个关节的角度参考。
集成控制单元212设置有地面反作用力负荷差计算单元2121和转矩控制单元2122。
地面反作用力负荷差计算单元2121获取第一测量值和第二测量值。第一测量值指示将基于动力套装100(负荷减少设备)的重量和用户的重量的重量传递到地面接触表面的值。动力套装100减少了用户的负担并且至少由用户穿着。第二测量值指示将基于用户的重量的重量传递到地面接触表面的值。
地面反作用力负荷差计算单元2121基于第一测量值和第二测量值来计算地面反作用力负荷差,该地面反作用力负荷差是要减轻用户的负荷的量。第一测量值是基于由鞋底负荷传感器18检测到的鞋底负荷信息的鞋底地面反作用力负荷。第二测量值是基于由脚底负荷传感器19检测到的脚底负荷信息的脚底地面反作用力负荷。此外,地面反作用力负荷差计算单元2121计算从步行步骤的开始到结束的步态周期中,一只脚着地后另一只脚在腿站立期间的地面反作用力负荷差。
转矩控制单元2122控制由髋致动器13、膝致动器14和踝致动器15输出的输出转矩。转矩控制单元2122基于由地面反作用力负荷差计算单元2121计算出的地面反作用力负荷差以及由髋关节传感器23、膝关节传感器24和踝关节传感器25检测到的每条腿的各关节角度,控制输出转矩以减少在用户的腿部关节处的用户负荷。转矩控制单元2122可以基于第一测量值或第二测量值来控制输出转矩。
接下来,将详细描述控制设备21的操作。
图8是示出控制设备的操作的操作框图。
首先,地面反作用力负荷差计算单元2121基于第一测量值(鞋底地面反作用力负荷)和第二测量值(脚底地面反作用力负荷)来计算地面反作用力负荷差,其中第一测量值基于由鞋底负荷传感器18检测到的鞋底负荷信息,并且第二测量值基于由脚底负荷传感器19检测出的脚底负荷信息。
地面反作用力负荷差计算单元2121基于鞋底负荷信息,计算施加于设置在动力套装100的鞋底板16和脚用束带17的地面接触表面侧上的鞋底负荷传感器18的第一测量值(鞋底地面反作用力负荷)。具体地,地面反作用力负荷差计算单元2121基于包括在鞋底负荷信息中的每个网格点的电阻值来计算施加到每个网格点的压力和整个表面上的负荷,并且找出施加到鞋底负荷传感器18的第一测量值(鞋底地面反作用力负荷)。第一测量值指示的重量是施加到鞋底负荷传感器18上的重量(它是用户的重量在行走过程中的复合重量F')、动力套装100的重量和行李的重量F。更具体地,第一测量值是通过将“负荷(行李的重量F)+动力套装重量+体重+由加速度引起的力等”组合而获得的值。
地面反作用力负荷差计算单元2121基于脚底负荷信息计算施加到插入动力套装100的脚用束带17中的脚底负荷传感器19的第二测量值(脚底地面反作用力负荷)。第二测量值(脚底地面反作用力负荷)是施加到脚底负荷传感器19的重量,它是用户的重量和用户上的负荷的复合重量f(在行李和动力套装的重量中不能经由骨架部分11分散到地面接触表面的重量)。具体地,地面反作用力负荷差计算单元2121基于鞋底负荷信息中包括的每个网格点的电阻值来计算施加到每个网格点的压力以及整个表面上的负荷,并且找到施加到脚底负荷传感器19的第二测量值(脚底地面反作用力负荷)。更具体地,第二测量值是通过将“一部分负荷(行李的重量F)+一部分动力套装重量+(一部分)体重+一部分由加速度引起的力等”组合而获得的值。
地面反作用力负荷差计算单元2121通过从第一测量值减去第二测量值来计算地面反作用力负荷差。该地面反作用力负荷差是行李的重量和动力套装的重量中的经由骨架部分11直接施加于地面接触表面的重量。另外,通过减去基于动力套装100的重量的值,地面反作用力负荷差计算单元2121也可以仅算出在行李的重量中,在用户行走过程中经由骨架部11直接施加于地面接触表面的重量。
图9是表示地面反作用力负荷差的示例的图。
在该图中,虚线91是示出指示步态周期中的鞋底地面反作用力负荷的第一测量值的转变的曲线图,在该步态周期中,将用户的一条腿的步行步骤的开始到结束作为一个单元。实线92是示出指示步态周期中的脚底地面反作用力负荷的第二测量值的转变的曲线图。在该图中,水平轴示出步态周期中从一个步行步骤的开始到结束所经过的时间的百分比。
在该步态周期中,从该步态周期中0%到70%的时段指示站立的时段,在此期间,将脚放在地面接触表面上(腿正在站立)。在该步态周期中从70%到100%的时段指示摆动的时段,其中,由于脚与地面接触表面(地的表面)分开,所以没有负荷被施加到鞋底负荷传感器18和脚底负荷传感器19(腿正在摆动)。在图中,垂直轴指示负荷。地面反作用力负荷差计算单元2121通过从站立时段的任意时间点T处的第一测量值减去在时间点T处的第二测量值来计算地面反作用力负荷差N。
地面反作用力负荷差计算单元2121通过上述处理来计算左脚和右脚之间的地面反作用力负荷差。地面反作用力负荷差计算单元2121将计算出的两只脚的地面反作用力负荷差输出到转矩控制单元2122。
转矩控制单元2122使用由鞋底负荷传感器18检测出的当前第一测量值、由脚底负荷传感器19检测出的当前第二测量值、输入的地面反作用力负荷差、在每个关节处的角度参考θ
例如,假设动力套装100减小了地面反作用力负荷差,转矩控制单元2122计算转矩的目标值。此外,转矩控制单元2122可以通过使用第一测量值或第二测量值确定每条腿处于摆动的状态还是站立的状态。转矩控制单元2122可以基于摆动时的运动估计模型或站立时的运动估计模型,通过使用每个关节角度来计算在每条腿的每个关节处的输出转矩。转矩控制单元2122将计算出的每条腿的髋致动器13、膝致动器14和踝致动器15的转矩的目标值输出到致动器控制单元213。
致动器控制单元213基于每个转矩的目标值,利用角度控制器K
由此,用户在第k个时间序列中施加的套装和人之间的相互作用力F
注意,致动器控制单元213使用以下转矩计算公式作为示例来计算转矩τ。在该转矩计算公式(1)中,“(θ)/G(s)”指示对致动器控制单元213的反馈因子。“F
τ=K
图10是表示动力套装的处理的流程图。
首先,用户穿着动力套装100。这时,用户将脚底负荷传感器19插入到脚用束带17内。脚底负荷传感器19可以预先设置在脚用束带17内。作为脚底负荷传感器19的面积,可以使用适合于用户的脚的大小的大小。另外,用户将鞋底负荷传感器18附接到动力套装100的脚部束带17或鞋底板16的地面接触表面侧。也可以将鞋底负荷传感器18预先设置在脚用束带17或鞋底板16的地面接触表面侧。作为鞋底负荷传感器18的面积,可以使用与用户的脚的大小相对应的适合于脚用束带17的大小。
用户操作设置在动力套装100中的控制设备21的电源按钮以打开电源。结果,控制设备21被启动。用户在穿着动力套装100的同时执行诸如步行、奔跑、弹跳和跳跃的动作。用户可以将行李装载在动力套装100的装载平台20上并且执行诸如步行、奔跑、弹跳和跳跃的操作。控制设备21的致动器控制单元213控制髋致动器13、膝致动器14和踝致动器15,以减少由于行李或动力套装100的重量而导致的用户上的负荷。由此,动力套装100跟踪用户的各种动作。
在驱动控制设备21的同时,信息获取单元211以预定间隔从髋关节传感器23、膝关节传感器24和踝关节传感器25获取关节角度信息(步骤S101)。在驱动控制设备21的同时,信息获取单元211以预定间隔从鞋底负荷传感器18获取鞋底负荷信息(步骤S102)。此外,在驱动控制设备21的同时,信息获取单元211以预定间隔从脚底负荷传感器19获取脚底负荷信息(步骤S103)。如上所述,鞋底负荷信息和脚底负荷信息是与在鞋底负荷传感器18和脚底负荷传感器19的各个网格点处的压力(负荷)相对应的电阻值。预定间隔为例如每隔很短的时间(诸如每10毫秒)。
地面反作用力负荷差计算单元2121通过从由鞋底负荷信息指示的第一测量值(鞋底地面反作用力负荷)减去由脚底负荷信息表示的第二测量值(脚底地面反作用力负荷)来计算地面反作用力负荷差(步骤S104)。转矩控制单元2122基于第一测量值、第二测量值、地面反作用力负荷差、各关节的角度参考以及各关节的关节角度来计算由每条腿的髋致动器13、膝致动器14和踝致动器15输出的转矩的目标值(步骤S105)。
致动器控制单元213向每个致动器输出信号(τ),该信号(τ)用于使每条腿的髋致动器13、膝致动器14和踝致动器15输出由转矩控制单元2122计算出的转矩目标值的各个转矩(步骤S106)。之后,处理返回到步骤S101的处理,并且控制设备21重复从步骤S101至S106的处理,直到处理完成为止。
根据上述处理,基于通过从第一测量值减去第二测量值而获得的地面反作用力负荷差来控制由髋致动器13、膝致动器14和踝致动器15输出的转矩,其中,第二测量值基于用户的重量传递到地面接触表面的重量,第一测量值基于动力套装100的重量和用户的重量被传递到地面接触表面的重量。结果,动力套装100的控制设备21可以通过考虑用户的负荷减轻量(由动力套装100减少了负荷的状态)而直接控制负荷的减少。因此,可以实现更适当的用户负荷减少。
此外,当动力套装100以外的设备执行上述处理时,由于数据发送/接收的延迟而可能损害实时属性。但是,在本实施例中,由于动力套装100所包括的控制设备21执行上述处理,因此可以无延迟地响应于用户的突然操作。
尽管已经在上面描述了本发明的实施例,但是鞋底负荷传感器18可以预先设置在动力套装100的鞋底板16的地面接触表面侧。而且,脚底负荷传感器19可以预先插入脚用束带17的内部。
在以上描述中,示出了鞋底负荷传感器18具有覆盖脚用束带17的整个下侧的面积,并且脚底负荷传感器19具有覆盖脚用束带17中的脚的整个下侧的面积。然而,即使在施加负荷的位置偏离的情况下,鞋底负荷传感器18也能够测量从鞋底板16或脚用束带17施加到地面接触表面的负荷。
例如,鞋底负荷传感器18可以是设置在鞋底板16的地面接触表面侧的多个压力传感器。即使在鞋底板16的地面接触表面上的负荷点随着时间而移动,多个压力传感器依次测量在每个负荷点处的负荷,并且输出包括与该负荷相对应的电阻值的鞋底负荷信息。
脚底负荷传感器19也可以由多个压力传感器构成。即使当脚用束带17中的脚底的负荷位置随着时间的流逝而移动时,多个压力传感器也顺序地测量负荷,并且输出包括与该负荷相对应的电阻值的脚底负荷信息。
地面反作用力负荷差计算单元2121可以基于从这些多个传感器获得的鞋底负荷信息和脚底负荷信息来计算第一测量值、第二测量值和地面反作用力负荷差。
地面反作用力负荷差计算单元2121可以基于过去的鞋底负荷信息和脚底负荷信息通过机器学习来计算与感测信息相对应的负荷,并且将该负荷存储在存储单元215中。在这种情况下,地面反作用力负荷差计算单元2121可以从存储单元215读取与由鞋底负荷信息和脚底负荷信息指示的电阻值相对应的负荷(鞋底地面反作用力负荷和脚底地面反作用力负荷),以用于计算地面反作用力负荷差。
鞋底负荷传感器18和脚底负荷传感器19之间的布置关系不限于上述。
图11和图12是示出鞋底负荷传感器和脚底负荷传感器的其他布置示例的图。
图11示出了当从脚跟方向上视觉识别右脚的脚用束带17和每个传感器时的视图。
图12示出了当从大腿内侧方向上视觉识别图11的右脚的脚用束带17和每个传感器时的视图。
这些图11和图12与图2和图3不同之处在于,提供保护片140以覆盖鞋底负荷传感器18的整个下侧。此外,鞋底板16被嵌入在脚用束带17的鞋底141中。脚用束带17的地面接触部分具有较平坦的形状。保护片140设置在鞋底负荷传感器18的下侧。保护片140可以设置为垂直地夹着鞋底负荷传感器18。通过用保护片140保护鞋底负荷传感器,可以提高鞋底负荷传感器18的耐久性,并且具有可以防止诸如测量中的损伤问题的效果。
此外,在以上示例中,控制设备21设置在动力套装100中,但是本发明不限于此,并且通过有线或无线方式与动力套装100通信地连接的另一设备可以具有控制设备21的功能。
图13是示出控制设备的最小配置的图。
负荷减少设备的最小配置是控制设备21。控制设备21可以至少具有上述地面反作用力负荷差计算单元2121和转矩控制单元2122的功能。
地面反作用力负荷差计算单元2121以基于负荷减少设备的重量和用户的重量的重量被传递到地面接触表面的第一测量值和基于用户的重量的重量被传递到地面接触表面的第二测量值为基础,来计算地面反作用力负荷差,该地面反作用力负荷差是要从用户减轻的负荷的量。负荷减少设备减少用户的负荷,并且至少具有保持用户所穿着的负荷的机构。
转矩控制单元2122基于由地面反作用力负荷差计算单元2121计算出的地面反作用力负荷差,控制由髋致动器13、膝致动器14和踝致动器15输出的输出转矩,以减少在用户双腿的关节处的用户的负荷。
上述控制设备21也可以是配备有诸如CPU(中央处理单元)101、ROM(只读存储器)102、RAM(随机存取存储器)103、HDD(硬盘驱动器)104和无线通信设备105之类的硬件的计算机。
上述控制设备21在内部具有计算机系统。上述每个处理的过程以程序的形式存储在计算机可读记录介质中,该过程由读取并执行该程序的计算机来执行。在此,计算机可读记录介质是指磁盘、磁光盘、CD-ROM、DVD-ROM或半导体存储器等。此外,该计算机程序可以经由通信线路被分发到计算机,并且接收到该分发的计算机可以执行该程序。
此外,上述程序可以用于实现上述一些功能。
此外,上述程序可以是可以与已经记录在计算机系统中的程序结合实现上述功能的所谓的差分文件(差分程序)。
要求于2018年11月12日提交的日本专利申请No.2018-211993的优先权,其内容通过引用并入本文。
工业适用性
根据本发明,可以提供一种能够相对于用户的运动进行更适当地负荷减少的负荷减少设备。
[附图标记列表]
100:动力套装
11:骨架部分
12:皮带
13:髋致动器
14:膝致动器
15:踝致动器
16:鞋底板
17:脚用束带
18:鞋底负荷传感器
19:脚底负荷传感器
20:装载平台
21:控制设备
22:电池
23:髋关节传感器
24:膝关节传感器
25:踝关节传感器
211:信息获取单元
212:集成控制单元
2121:地面反作用力负荷差计算单元
2122:转矩控制单元
213:致动器控制单元
214:电源单元
215:存储单元。
- 负荷减少设备、控制设备、负荷减少方法和用于存储程序的存储介质
- 负荷减少设备、负荷减少方法和存储程序的存储介质