一种分体式工务巡检机器人平台
文献发布时间:2023-06-19 11:50:46
技术领域
本发明涉及一种用于装载轨道巡检机器人的移动平台。
背景技术
通常地铁线路日常维保,采用人工步巡,目视检查方式检查线路(包括钢轨,道床),隧道等异常状态,人工步巡速度不超过3km/h,巡检效率低,距离长,劳动强度大,且无法保障检查质量。近年出现一些智能设备辅助线路巡检,包括搭载在运营车的车载巡检设备,专业工程检测车等,保障线路的安全,但无法完全取代日常人工步巡。主要原因有:运营车载巡检设备有超高的检测频率,但功能单一,速度快,检测精细度相对不足;大型工程检测车检测周期跨度大,调度困难。因此地铁线路巡检出现一些轨道上自动运行的检测装置,用于辅助人工巡检,提升检修效率。
当前地铁轨道自行走的检测装置,包括钢轨探伤车,线路巡检机器人等,主要运行方式分为载人运行与无人运行,结构上分为拆卸与整体,检测功能有仅执行一项检测的,如仅进行钢轨廓形检测的,仅进行隧道三维扫描的,以及仅进行钢轨探伤的单一类型检测装置,也有搭载较多检测模块的综合检测装置。
由于地铁隧道中使用检测装置作业,受诸多限制,包括检测装置进入线路站台,上下电梯,过屏蔽门,上下轨道均受空间限制;受作业天窗时间2到4小时,且巡检作业中存在多次上下道的情况限制,因此检测装置要求做到重量轻,快速安装拆卸,使用便捷。目前综合巡检类轨道自行走的检测装置均存在体积大,重量大于150kg,多人组装拆卸时间长,中途上下道多次拆卸组装,应用非常不方便的问题。
发明内容
有鉴于此,本发明提供一种分体式工务巡检机器人平台,可搭载巡检人员以及多种传感器在轨道上巡检,能够实现便捷运输、快速上下道。
为解决以上技术问题,本发明的技术方案为采用一种分体式工务巡检机器人平台,包括:载人单元,用于承载巡检人员在轨道上运行;载物单元,用于承载检测设备在轨道上运行;所述载人单元和载物单元物理结构相互独立。
作为一种改进,所述载人单元包括车架以及设置在车架底部的车轮;所述车架上安装有供巡检人员乘坐的座椅;还包括用于驱动车轮的驱动系统、用于制动的制动系统、用于与远程服务器通信的通信系统、防护系统,所述驱动系统、制动系统、通信系统、防护系统均与控制系统连接;
所述载物单元包括车架以及设置在车架底部的车轮;所述车架上安装有检测系统;还包括用于驱动车轮的驱动系统、用于制动的制动系统、用于与远程服务器通信的通信系统、防护系统,所述驱动系统、制动系统、通信系统、防护系统均与控制系统连接。
作为一种进一步的改进,所述驱动系统包括若干单独驱动单个车轮的轮毂电机,所述轮毂电机上设置有编码器;所述制动系统为具有断电自动落锁并带手动释放功能的电控机械刹车;所述通信系统为无线通信装置;所述防护系统包括前车灯、警示尾灯、行车记录摄像头、激光雷达装置、防撞缓冲气囊。
作为另一种更进一步的改进,所述无线通信装置为WIFI网关,或/和,4G/5G网关。
作为一种改进,所述检测系统包括以下装置中的任意一种或者几种:线路巡检装置,用于对钢轨、道床、扣件系统进行缺陷及异物检测;钢轨波磨检测装置,用于对钢轨短波波磨进行检测;钢轨表面缺陷检测装置,用于对钢轨表面进行检测;隧道巡检装置,用于对隧道壁及隧道环境进行检测。
作为一种改进,所述线路巡检装置为3D相机组件;所述钢轨波磨检测装置为阵面相机和线形激光构成的传感器;所述钢轨表面缺陷检测装置为高清线阵相机组;所述隧道巡检装置为高清线阵相机组。
作为一种改进,所述载物单元跟随载人单元在轨道上运行,或/和,所述载人单元驱赶载物单元在轨道上运行。所述的“跟随”、“驱赶”实际上都是载人单元主动而载物单元随动,即当载人单元在前时为“跟随”,而载物单元在前时为“驱赶”。
作为一种改进,所述载人单元的车架分为前、中、后三段,前段车架、中段车架、后段车架利用铰链依次连接;所述载人单元的车轮分为2个前轮和2个后轮,所述前轮设置在前段车架上,所述后轮设置在后段车架上;所述座椅包括利用铰链连接的座板和靠背;所述座板和靠背之间设置有活动连杆,所述活动连杆包括活动连接的前杆和后杆,并且所述前杆与座板活动连接,后杆与靠背活动连接;所述靠背与后段车架支架设置有可相互扣合的卡扣。
作为一种改进,所述载物单元的车架分为前、中、后三段,前段车架、中段车架、后段车架利用铰链依次连接;所述载物单元的车轮为2个前轮和2个后轮,所述前轮设置在前段车架上,所述后轮设置在后段车架上;并且中段车架与后轮轴上设置有可相互扣合的卡扣;所述前段车架上设置有检测系统安装支架;所述后段车架顶面设置有滚轮。
作为一种改进,每个载人单元可配合一个或者一个以上的载物单元使用。由于检测设备众多,载人单元和载物单元可采取一拖多的形式,即一个载人单元配合多个载物单元协同工作。
本发明的有益之处在于:具有上述结构的分体式工务巡检机器人平台,采用分体式,轻量化设计的巡检机器人平台,能够两人方便的搬运,上下轨道,提供搭载巡检人员,搭载更多的检测传感器的能力,实现地铁线路单次巡检覆盖钢轨、道床、隧道检测项点,并具备较强的扩展能力,实现综合巡检。
分体式结构,单个平台折叠后尺寸适应地铁空间限制,折叠与搬运方式设计免组装,缩短了上下道时间。
载物单元与载人单元分离,提供更多空间搭载检测传感器,同时系统支持扩展载物单元,增加了更多的搭载检测模块的能力。
附图说明
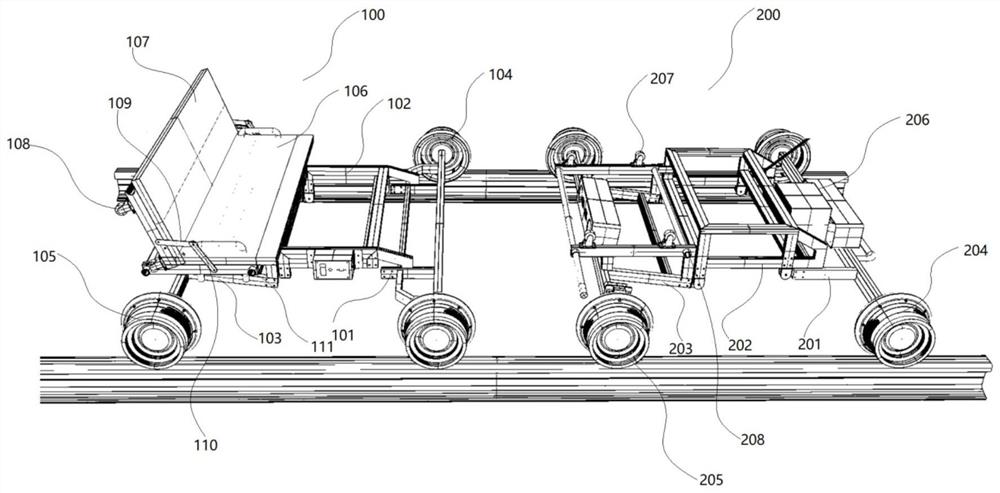
图1为本发明的结构示意图。
图2为系统原理图。
图中标记:100载人单元、101前段车架、102中段车架、103后段车架、104前轮、105后轮、106座板、107靠背、108滚轮、109后杆、110前杆、111搬运把手。
200载物单元、201前段车架、202中段车架、203后段车架、204前轮、205后轮、206检测传感器安装支架、207滚轮、208搬运把手。
具体实施方式
为了使本领域的技术人员更好地理解本发明的技术方案,下面结合具体实施方式对本发明作进一步的详细说明。
如图1~图2所示,本发明包括:载人单元100,用于承载巡检人员在轨道上运行;载物单元200,用于承载检测设备在轨道上运行;所述载人单元100和载物单元200物理结构相互独立。
具体地,载人单元100包括车架以及设置在车架底部的车轮;所述车架上安装有供巡检人员乘坐的座椅;还包括用于驱动车轮的驱动系统、用于制动的制动系统、用于与远程服务器通信的通信系统、防护系统,所述驱动系统、制动系统、通信系统、防护系统均与控制系统连接。
而载物单元包括车架以及设置在车架底部的车轮;所述车架上安装有检测系统;还包括用于驱动车轮的驱动系统、用于制动的制动系统、用于与远程服务器通信的通信系统、防护系统,所述驱动系统、制动系统、通信系统、防护系统均与控制系统连接。
其中,驱动系统包括若干单独驱动单个车轮的轮毂电机,所述轮毂电机上设置有编码器;所述制动系统为具有断电自动落锁并带手动释放功能的电控机械刹车;所述通信系统为无线通信装置;所述防护系统包括前车灯、警示尾灯、行车记录摄像头、激光雷达装置、防撞缓冲气囊。所述无线通信装置优选为WIFI网关,或/和,4G/5G网关。
检测系统包括以下装置中的任意一种或者几种:线路巡检装置,用于对钢轨、道床、扣件系统进行缺陷及异物检测;钢轨波磨检测装置,用于对钢轨短波波磨进行检测;钢轨表面缺陷检测装置,用于对钢轨表面进行检测;隧道巡检装置,用于对隧道壁及隧道环境进行检测。优选地,所述线路巡检装置为3D相机组件;所述钢轨波磨检测装置为阵面相机和线形激光构成的传感器;所述钢轨表面缺陷检测装置为高清线阵相机组;所述隧道巡检装置为高清线阵相机组。
当然,载物单元上还可以搭载其他检测设备如用于对钢轨进行探伤的探伤设备、用于对钢轨几何尺寸进行检测的设备,即可以根据需求对需要搭载的设备进行选择和调整。上述检测设备均为现有技术,本发明中不作赘述。
控制系统最好由平板电脑、便携式电脑等计算机系统承载,并由乘坐在载人单元上的巡检人员操作。当然,也可以是安装在载人单元上的物理加减速开关、刹车踏板等等。
为了简化操作,载物单元跟随载人单元在轨道上运行,或/和,所述载人单元驱赶载物单元在轨道上运行。即载物单元跟随载人单元的动作前进、后退或者停止等等。巡检人员只需要对载人单元进行操作即可。为了达到上述效果,可以采用在载人单元和载物单元上安装激光测距仪,根据两个单元之间的距离来自动控制载物单元的动作。当然也可以选用其他方式来达到上述效果,如雷达测距、视觉跟踪、光电通讯、WIFI通讯等等。上述的连接并不影响两个单元在物理硬件上的分体独立。
另外,每个载人单元可配合一个或者一个以上的载物单元使用。多个载物单元可设置在载人单元的前方,也可以设置在载人单元的后方,也可以分设于载人单元的前后。载人单元与载物单元之间、载物单元与载物单元之间也可以利用上述随动的方式保持行动一致。
为了进一步方便搬运,载人单元的车架以及载物单元的车架均可折叠。
载人单元100的车架底部设置有2个前轮104和2个后轮105;所述车架分为前、中、后三段,前段车架101、中段车架102、后段车架103利用铰链依次连接;所述前轮104设置在前段车架101上,所述后轮105设置在后段车架103上。后段车架103两侧设置有可伸缩的搬运把手111。座椅包括利用铰链连接的座板106和靠背107;所述座板106和靠背107之间设置有活动连杆,所述活动连杆包括活动连接的前杆110和后杆109,并且所述前杆110与座板106活动连接,后杆109与靠背107活动连接。活动连杆可以设置左右两副。座椅安装在后段车架103上,所述靠背107背部设置有滚轮108;本实施例中滚轮108优选万向轮。并且靠背107和后段车架102上设置有可相互扣合的卡扣。
载物单元200的车架底部设置有2个前轮204和2个后轮205;所述车架分为前、中、后三段,前段车架201、中段车架202、后段车架203利用铰链依次连接;所述前轮204设置在前段车架201上,所述后轮205设置在后段车架203上;并且中段车架202与后轮轴上设置有可相互扣合的卡扣。后段车架203两侧设置有可伸缩的搬运把手208。所述检测传感器安装支架206设置在前段车架201上;所述后段车架203顶面设置有滚轮207。本实施例中滚轮207优选万向轮。除了检测传感器安装支架206外,还应当提供电源接口,使之能够搭载不同类型的传感器,包括道床,钢轨,隧道视觉传感器,激光雷达传感器等。
载人单元100和载物单元200均优选电驱动,采用四轮驱动的轮毂电机,具备前行后退功能,最高运行速度不小于20km/h,具备电控机械制动功能,具备一键启停,手动释放功能。适应地铁线路最大爬坡能力60‰,在钢轨踏面淋水的60‰坡道上稳定驻车,可以从静止状态实现坡起。
载人单元100的折叠过程如下:
1、折叠座椅。由于座板106和靠背107之间利用铰链连接,因此可以将靠背107下翻使之与座板106重叠。
2、折叠前轮104。前轮104安装在前段车架101上,而前段车架101与中段车架102之间利用铰链连接,因此可以将前段车架101下翻往后折叠。
3、折叠后轮105。后轮105安装在后段车架103上,而后段车架103与中段车架102之间利用铰链连接,因此可以将后段车架103下翻往前折叠。
4、固定靠背107和后段车架103。靠背107和后段车架103上设置有卡扣,将两个卡扣连接即可将二者固定,避免在搬运的时候散脱。
5、将折叠好的载人单元100翻转,靠背107背部设置有滚轮108,可以用于推行。并将后段车架103两侧设置的搬运把手111拉出,方便巡检人员搬运。
载物单元200的折叠过程如下:
1、折叠前轮204。前轮204安装在前段车架201上,而前段车架201与中段车架202之间利用铰链连接,因此可以将前段车架201下翻往后折叠。
2、折叠后轮205。后轮205安装在后段车架203上,而后段车架203与中段车架202之间利用铰链连接,因此可以将后段车架203下翻往前折叠。
3、固定后轮轴和中段车架202。后轮轴和中段车架202上设置有卡扣,将两个卡扣连接即可将二者固定,避免在搬运的时候散脱。
4、将折叠好的载人单元200翻转,后段车架203顶部设置有滚轮207,可以用于推行。并将后段车架203两侧设置的搬运把手208拉出,方便巡检人员搬运。
载人单元100可搭载两名巡检作业人员。两名巡检作业人员通过折叠和搬运方式实现快速上下轨道。通过折叠使得机器人单体成搬运状态,搬运状态下外观结构最大宽度≯600mm,顺利进入地铁站直升电梯与站台屏蔽端门。搬运状态下最大高度≯530mm,能通过皮卡或小型货车运输。机器人单体展开在轨道上,成运行状态,此时,外形尺寸不超过2000×1610×855(L×W×H)。载人与载物单元均提供便于搬运的把手。车体使用铝合金材料,单个平台重量为35Kg左右。
以上仅是本发明的优选实施方式,应当指出的是,上述优选实施方式不应视为对本发明的限制,本发明的保护范围应当以权利要求所限定的范围为准。对于本技术领域的普通技术人员来说,在不脱离本发明的精神和范围内,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
- 一种分体式工务巡检机器人平台
- 一种基于变电站远程巡检平台的巡检机器人交互方法