电动汽车
文献发布时间:2023-06-19 11:59:12
技术领域
本发明涉及具备向车轮传递转矩的旋转机的电动汽车。
背景技术
在专利文献1中公开了一种在由驱动马达驱动的车辆中展现仿真的换挡的技术。在该车辆中进行如下转矩变动控制:在由车速、加速器开度、加速器打开速度或制动器踩踏量规定的规定的契机,使驱动马达的转矩减少设定变动量后增加。由此,抑制给习惯了具备有级变速器的车辆的驾驶员带来的违和感。
现有技术文献
专利文献
专利文献1:日本特开2018-166386号公报
在具备变速用的换挡装置和离合器装置的所谓的手动变速车辆(ManualTransmission Vehicle,以下,记为“MT车辆”)中,通过由驾驶员在踩踏离合器装置时对换挡杆进行操作来进行变速挡的切换。在这样的手动变速动作中,在离合器的释放时和连接时被传递至车轮的转矩会产生瞬间的变动。根据上述的技术,通过驱动马达的转矩变动控制来仿真地再现手动变速动作的转矩变动。
然而,在上述的技术中,无法通过驾驶员自身的操作来自主地决定模拟了变速动作的转矩变动控制的定时。这是因为上述技术的车辆不具有MT车辆所具备的离合器装置、换挡装置。如此,不介入由驾驶员自身进行的手动变速动作的仿真的变速动作恐怕会给追求操纵MT车辆的乐趣的驾驶员的驾驶感觉带来违和感。
发明内容
本发明是鉴于上述这样的问题而完成的,其目的在于,提供一种能仿真地再现手动变速车辆的手动变速动作的电动汽车。
用于解决问题的方案
在第一发明中,为了达成上述的目的,电动汽车具备:旋转机,向车轮传递转矩;离合器装置,由驾驶员操作;以及转矩控制部,控制旋转机的转矩。转矩控制部被配置为根据离合器装置的操作量来控制旋转机的转矩。
第二发明在第一发明中还具有以下的特征。
电动汽车还具备换挡装置,该换挡装置选择旋转机的相对于转速的转矩特性分级地不同的多个模式中的任一个模式。离合器装置在换挡装置的操作时被操作。转矩控制部被配置为根据由换挡装置选择出的模式来控制旋转机的转矩。
第三发明在第二发明中还具有以下的特征。
转矩控制部被配置为随着离合器装置的操作量变大而使旋转机的转矩向零变化。
第四发明在第二发明或第三发明中还具有以下的特征。
转矩控制部被配置为随着离合器装置的操作量变小而使旋转机的转矩向与由换挡装置选择出的模式相应的值变化。
第五发明在第二发明至第四发明中的任一个发明中还具有以下的特征。
转矩控制部被配置为在离合器装置的操作量大于规定的操作量时容许由换挡装置进行的模式的选择。
第六发明在第二发明至第五发明中的任一个发明中还具有以下的特征。
转矩控制部具有多个种类的预设式样,该预设式样是被规定了多个模式的转矩特性的式样,转矩控制部被配置为按照从多个种类的预设式样的选择中选择出的预设式样来控制旋转机的转矩。
第七发明在第二发明至第六发明中的任一个发明中还具有以下的特征。
转矩控制部被配置为:基于电动汽车的驾驶状态来获取虚拟发动机转速,该虚拟发动机转速是模拟了假定为电动汽车的行驶状态由发动机的驱动力实现时的发动机转速的转速,根据获取到的虚拟发动机转速来附加发动机声。
第八发明在第二发明至第七发明中的任一个发明中还具有以下的特征。
电动汽车还具备输入装置,该输入装置任意地设定多个模式的转矩特性。
发明效果
根据第一发明,电动汽车具备离合器装置。并且,转矩控制部根据离合器装置的操作量来控制旋转机的转矩。由此,与驾驶员对离合器装置的操作对应地控制旋转机的转矩,因此能仿真地再现MT车辆的手动变速动作。其结果是,能为追求手动变速动作而拥有带内燃机的MT车辆的人群提供换为电动汽车的机会,因此能期待由电动汽车的普及实现的CO
根据第二发明,能通过换挡装置来选择旋转机的相对于转速的转矩特性分级地不同的多个模式中的任一个模式。由此,与驾驶员对换挡装置的操作对应地控制旋转机的转矩,因此能仿真地再现MT车辆的手动变速动作。
根据第三发明,能随着离合器装置的操作量变大而使旋转机的转矩向零趋近。由此,能通过使离合器装置的操作量变大的操作来再现转矩向零释放的感觉,因此驾驶员能强烈地拥有自身正在进行手动变速动作的驾驶感觉。
根据第四发明,能随着离合器装置的操作量变小而使旋转机的转矩向与由换挡装置选择出的模式相应的值趋近。由此,能通过使离合器装置的操作量变小的操作来再现向车轮传递转矩的感觉,因此驾驶员能强烈地拥有自身正在进行手动变速动作的驾驶感觉。
根据第五发明,在离合器装置的操作量大于规定的操作量时容许由换挡装置进行的模式的选择。由此,能忠实地再现操作离合器装置来操作换挡装置的MT车辆的手动变速动作。
根据第六发明,能变更与模式建立了对应的转矩特性的式样。由此,能实现与驾驶员的心情相应的转矩特性。
根据第七发明,根据模拟了发动机的转速的虚拟转速来附加发动机声。由此,驾驶员能获得正在驾驶发动机车辆的感觉。
根据第八发明,驾驶员能使用输入装置来根据喜好任意地设定多个模式的转矩特性。
附图说明
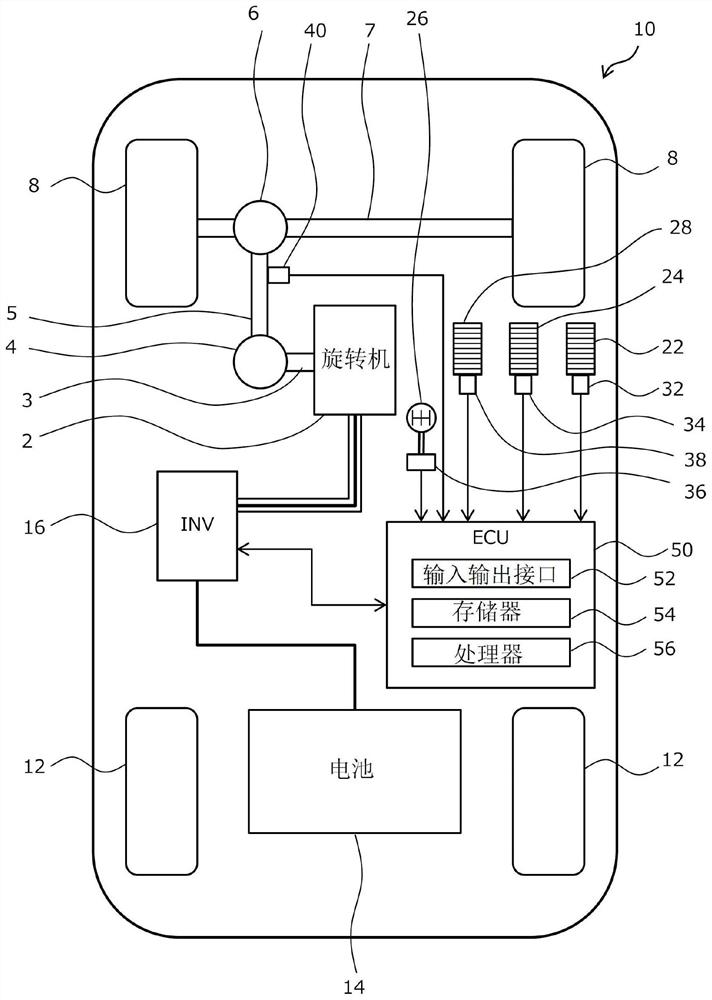
图1是示意性地表示实施方式的电动汽车的构成的图。
图2是表示与旋转机的转矩控制有关的ECU的功能块(functional block)的图。
图3是表示虚拟发动机输出转矩的计算映射图的图。
图4是表示转矩传递增益的计算映射图的图。
图5是表示传动比的计算映射图的图。
图6是表示由驾驶员执行的仿真的手动变速动作的过程的动作流程图。
图7是举例示出了与多个模式对应的旋转机的转矩特性的图。
图8是表示与转矩特性设定处理有关的构成和功能的框图。
图9是表示使用了触摸面板的转矩特性设定处理的一个例子的图。
附图标记说明
2:旋转机;
3:输出轴;
4:齿轮机构;
5:传动轴;
6:差动齿轮;
7:驱动轴;
8:驱动轮;
10:电动汽车;
12:从动轮;
14:电池;
16:逆变器;
22:加速踏板;
24:制动踏板;
26:换挡杆(换挡装置);
28:离合器踏板(离合器装置);
32:加速器位置传感器;
34:制动器位置传感器;
36:换挡位置传感器;
38:离合器位置传感器;
50:控制装置(ECU);
52:输入输出接口;
54:存储器;
60:触摸面板;
62:输入装置;
64:输出装置;
500:虚拟发动机转速计算部;
502:虚拟发动机输出转矩计算部;
504:转矩传递增益计算部;
506:离合器输出转矩计算部;
508:传动比计算部;
510:变速器输出转矩计算部。
具体实施方式
以下,参照附图对本发明的实施方式进行说明。其中,在以下所示的实施方式中提及了各要素的个数、数量、量、范围等数值的情况下,除了特别明示的情况、原理上明显地确定为该数值的情况之外,本发明并不限定于该提及的数值。此外,就在以下所示的实施方式中说明的构造、步骤等而言,除了特别明示的情况、原理上明显地确定为该构造、步骤等的情况之外,在本发明中不一定是必须的。
实施方式.
1.实施方式的电动汽车的构成
图1是示意性地表示实施方式的电动汽车的构成的图。如图1所示,电动汽车10具备作为驱动源的旋转机(电动马达)2。旋转机2例如是三相交流马达。旋转机2的输出轴3经由齿轮机构4连接于传动轴5的一端。传动轴5的另一端经由差动齿轮6连接于车辆前方的驱动轴7。电动汽车10具备作为前车轮的驱动轮8和作为后车轮的从动轮12。驱动轮8分别设于驱动轴7的两端。在传动轴5配置有用于检测轴转速Np的转速传感器40。
电动汽车10具备电池14和逆变器(inverter)16。电池14蓄存用于旋转机2的驱动的电能。逆变器16例如通过进行脉冲宽度调制处理(PWM;Pulse Width Modulation)来将蓄存于电池14的直流电流转换成三相交流电流。此外,逆变器16具有基于从后述的ECU50输入的目标驱动转矩来控制旋转机2的驱动转矩的功能。
电动汽车10具备用于输入加速请求的加速踏板22和用于输入制动请求的制动踏板24来作为用于供驾驶员输入对该电动汽车10的动作请求的动作请求输入装置。在加速踏板22设有用于检测加速器开度Pap(%)的加速器位置传感器32。此外,在制动踏板24设有感测踏板踩踏量的制动器位置传感器34。由加速器位置传感器32和制动器位置传感器34感测到的信号分别被输出至后述的ECU50。
电动汽车10还具备换挡杆26和离合器踏板28来作为动作请求输入装置。不过,本实施方式的电动汽车10是由旋转机2驱动的车辆,不具备发动机,因此不具备MT车辆所具备的变速器和离合器机构。因此,换挡杆26和离合器踏板28被赋予作为仿真换挡杆和仿真离合器踏板的以下的功能来代替机械地对实际的变速器和离合器机构进行操作的功能。
换挡杆26作为换挡装置发挥功能,该换挡装置用于供驾驶员从分级地规定了旋转机2的相对于转速的转矩特性的多个模式中选择一个模式。在此的多个模式是模拟了MT车辆的挡位(gear stage)的换挡模式,例如,包括1挡、2挡、3挡、4挡、5挡、6挡以及空挡的各模式。各模式的转矩特性被预设为模拟了MT车辆的挡位的转矩特性。不过,该各模式只是模拟地再现了MT车辆的挡位的模式,因此没有用于与实际的固定传动比对应的转矩特性的制约。就是说,多个模式各自的转矩特性只要在旋转机2的输出范围内就可以自由地进行预设。
换挡杆26具有模拟了MT车辆所具备的换挡杆的构造。换挡杆26的配置和操作感等同于实际的MT车辆。换挡杆26设有与转矩特性不同的多个模式对应的各位置。在换挡杆26设有感测表示模式的位置的换挡位置Gp的换挡位置传感器36。由换挡位置传感器36感测到的信号被输出至后述的ECU50。
离合器踏板28作为离合器装置发挥功能,该离合器装置具有模拟了MT车辆所具备的离合器踏板的构造。离合器踏板28在驾驶员对换挡杆26进行操作时被踩踏。离合器踏板28的配置和操作感等同于实际的MT车辆。在离合器踏板28设有用于检测作为离合器踏板28的操作量的离合器踏板踩踏量Pc(%)的离合器位置传感器38。由离合器位置传感器38感测到的信号被输出至后述的ECU50。
电动汽车10的旋转机2由控制装置50来控制。控制装置50是ECU(ElectronicControl Unit:电子控制单元)。ECU50的处理电路至少具备输入输出接口52、至少一个存储器54以及至少一个CPU(处理器)56。输入输出接口52被设为用于从装配于电动汽车10的各种传感器取入传感器信号,并且向电动汽车10所具备的各种致动器输出操作信号。在ECU50取入信号的传感器中,除了上述的各种传感器之外,还包括电动汽车10的控制所需的各种传感器。在ECU50发出操作信号的致动器中,包括上述的旋转机2等各种致动器。在存储器54中存储有用于控制电动汽车10的各种控制程序、最新的换挡位置Gp、映射图等。CPU(处理器)56从存储器读出控制程序等并执行,基于取入的传感器信号来生成操作信号。
需要说明的是,ECU50的各功能通过软件、固件或软件与固件的组合来实现。此外,在ECU50的处理电路具备至少一个专用的硬件的情况下,处理电路例如是单个电路、复合电路、程序化的处理器、并行程序化的处理器、ASIC(Application Specific IntegratedCircuit;专用集成电路)、FPGA(Field Programmable Gate Array;现场可编程门阵列)或它们的组合。ECU50的各部的功能可以通过处理电路分别实现。此外,ECU50的各部的功能也可以通过处理电路一起实现。此外,对于ECU50的各功能,也可以通过专用的硬件实现一部分,通过软件或固件实现另一部分。如此,处理电路通过硬件、软件、固件或它们的组合来实现ECU50的各功能。
2.ECU的功能
在由ECU50进行的电动汽车10的控制中,包括控制被传递至驱动轮8的转矩的转矩控制。在此处的转矩控制中,以被传递至传动轴5的旋转机驱动转矩Tp成为旋转机请求驱动转矩Tpreq的方式控制旋转机2的驱动转矩。就是说,ECU50作为电动汽车10所具备的转矩控制部发挥功能。
在此,在旋转机2的转矩控制中,ECU50进行假定为电动汽车10的行驶状态由搭载有虚拟的发动机和变速器的MT车辆实现的运算。并且,ECU50计算从变速器输出的变速器输出转矩Tgout,将计算出的变速器输出转矩Tgout用作旋转机请求驱动转矩Tpreq。在以下的说明中,将虚拟地搭载于电动汽车10的发动机记为“虚拟发动机”,将虚拟发动机的发动机输出转矩记为“虚拟发动机输出转矩Teout”,并且将虚拟发动机的转速记为“虚拟发动机转速Ne”。
图2是表示与旋转机的转矩控制有关的ECU50的功能块的图。ECU50具备虚拟发动机转速计算部500、虚拟发动机输出转矩计算部502、转矩传递增益计算部504、离合器输出转矩计算部506、传动比计算部508以及变速器输出转矩计算部510来作为与旋转机2的转矩控制关联的功能块。以下,对各个功能块进行详细说明。
2-1.虚拟发动机转速计算部500
在电动汽车10的行驶中,ECU50基于驾驶状态来动态地运算虚拟发动机转速Ne。例如,ECU50根据使用了传动轴5的轴转速Np、与换挡位置Gp对应的传动比r以及根据离合器踏板踩踏量Pc等运算的离合器机构的滑移率slip的以下的式(1),对行驶中的虚拟发动机转速Ne进行逆运算。
Ne=Np×(1/r)×slip··· (1)
需要说明的是,可以假定为从发动机输出的能量中的、未被用于向传动轴5的转矩传递的动能被用于虚拟发动机转速Ne的上升。因此,虚拟发动机转速Ne的计算也可以是基于以动能为基础的运动方程式动态地计算的方法。
此外,在MT车辆的怠速(idling)中,进行将发动机转速维持为恒定转速的怠速控制(Idle Speed Control:ISC控制)。因此,考虑到虚拟发动机中的ISC控制,例如在轴转速Np为0(零)且加速器开度Pap为0%时,ECU50假定虚拟发动机处于怠速中而将虚拟发动机转速Ne输出为规定的怠速转速(例如1000rpm)。计算出的虚拟发动机转速Ne被输出至虚拟发动机输出转矩计算部502。
2-2.虚拟发动机输出转矩计算部502
虚拟发动机输出转矩计算部502是执行计算虚拟发动机输出转矩Teout的处理的功能块。向虚拟发动机输出转矩计算部502输入加速器开度Pap和虚拟发动机转速Ne。ECU50的存储器54存储有按每个加速器开度Pap规定了相对于虚拟发动机转速Ne的虚拟发动机输出转矩Teout的映射图。图3是表示虚拟发动机输出转矩的计算映射图的图。在虚拟发动机输出转矩计算部502中,使用图3所示的映射图来计算与所输入的加速器开度Pap和虚拟发动机转速Ne对应的虚拟发动机输出转矩Teout。计算出的虚拟发动机输出转矩Teout被输出至离合器输出转矩计算部506。
2-3.转矩传递增益计算部504
转矩传递增益计算部504是执行计算转矩传递增益k的处理的功能块。转矩传递增益k是用于运算与虚拟发动机的离合器的踩踏量相应的转矩传递程度的增益。向转矩传递增益计算部504输入离合器踏板踩踏量Pc。ECU50的存储器54存储有规定了相对于离合器踏板踩踏量Pc的转矩传递增益k的映射图。图4是表示转矩传递增益的计算映射图的图。如图4所示,转矩传递增益k被规定为:在离合器踏板踩踏量Pc为Pc0至Pc1的范围内,转矩传递增益k为1;在离合器踏板踩踏量Pc为Pc1至Pc2的范围内,离合器踏板踩踏量Pc越增大则转矩传递增益k越逐渐向0减小;在离合器踏板踩踏量Pc为Pc2至Pc3的范围内,转矩传递增益k为0。在此,Pc0与离合器踏板踩踏量Pc为0%的位置对应,Pc1与从Pc0起的踩踏时的游隙极限的位置对应,Pc3与离合器踏板踩踏量Pc为100%的位置对应,Pc2与从Pc3起的复位时的游隙极限的位置对应。在转矩传递增益计算部504中,使用图4所示的映射图来计算与所输入的离合器踏板踩踏量Pc对应的转矩传递增益k。计算出的转矩传递增益k被输出至离合器输出转矩计算部506。
需要说明的是,图4所示的相对于离合器踏板踩踏量Pc增大的转矩传递增益k的变化只要是趋向0的广义单调递减(单调非递增)即可,对其变化曲线没有限定。例如,Pc1至Pc2的范围的转矩传递增益k的变化不限于直线的单调递减,也可以是向上凸出的单调递减曲线,此外,也可以是向下凸出的单调递减曲线。
2-4.离合器输出转矩计算部506
离合器输出转矩计算部506是执行计算离合器输出转矩Tcout的处理的功能块。离合器输出转矩Tcout是从与虚拟发动机连接的离合器机构输出的转矩。向转矩传递增益计算部504输入虚拟发动机输出转矩Teout和转矩传递增益k。在离合器输出转矩计算部506中,使用虚拟发动机输出转矩Teout乘以转矩传递增益k的以下的式(2)来计算离合器输出转矩Tcout。计算出的离合器输出转矩Tcout被输出至变速器输出转矩计算部510。
Tcout=Teout×k··· (2)
需要说明的是,实际的离合器机构大多包括弹簧、阻尼器等阻尼装置。因此,离合器输出转矩Tcout也可以考虑各自的特性来计算动态的传递转矩。
2-5.传动比计算部508
传动比计算部508是执行计算传动比r的处理的功能块。传动比r是与多个模式对应的旋转机2的转矩特性,模拟了变速器的传动比。向传动比计算部508输入换挡位置Gp。ECU50的存储器54存储有规定了相对于换挡位置Gp的传动比r的映射图。图5是表示传动比的计算映射图的图。如图5所示,传动比r被规定为换挡位置Gp越为高挡则传动比r越低。在传动比计算部508中,使用图5所示的映射图来计算与所输入的换挡位置Gp对应的传动比。计算出的传动比r被输出至变速器输出转矩计算部510。
2-6.变速器输出转矩计算部510
变速器输出转矩计算部510是执行计算变速器输出转矩Tgout的处理的功能块。变速器输出转矩Tgout是从变速器输出的转矩。向变速器输出转矩计算部510输入离合器输出转矩Tcout和传动比r。在变速器输出转矩计算部510中,使用离合器输出转矩Tcout乘以传动比r的以下的式(3)来计算变速器输出转矩Tgout。
Tgout=Tcout×r··· (3)
2-7.旋转机的转矩控制
ECU50在转矩控制中依次执行虚拟发动机输出转矩计算部502、转矩传递增益计算部504、离合器输出转矩计算部506、传动比计算部508以及变速器输出转矩计算部510中的处理。计算出的变速器输出转矩Tgout被输出给逆变器16来作为旋转机请求驱动转矩Tpreq。在逆变器16中,以旋转机驱动转矩Tp接近计算出的旋转机请求驱动转矩Tpreq的方式控制对旋转机的指令值。在转矩控制中,按规定的控制周期重复执行这样的处理,由此旋转机驱动转矩Tp被控制为旋转机请求驱动转矩Tpreq。
3.手动变速动作的具体的动作流程
电动汽车10的驾驶员在驾驶中的任意的定时进行手动变速动作。图6是表示由驾驶员执行的仿真的手动变速动作的过程的动作流程图。如图6所示,在本实施方式的电动汽车10中由驾驶员进行仿真的手动变速动作的情况下,驾驶员首先踩踏离合器踏板28(步骤S100)。当离合器踏板踩踏量Pc超过Pc1时,随着离合器踏板踩踏量Pc变大,离合器输出转矩Tcout向0变化。然后,当离合器踏板踩踏量Pc超过Pc2时,离合器输出转矩Tcout成为0。根据这样的离合器踏板28的踩踏动作,旋转机驱动转矩Tp与离合器踏板28的踩踏动作对应地向0变化,因此驾驶员能在踩踏了MT车辆的离合器踏板时实际感受到转矩释放的感觉。
接着,驾驶员在踩踏了离合器踏板28的状态下对换挡杆26进行操作(步骤S102)。在此,例如,换挡杆26的模式从1挡被操作至2挡。根据这样的伴有离合器踏板28的踩踏的换挡杆26的操作,驾驶员能获得接近MT车辆的手动变速动作的感觉。
接着,驾驶员使离合器踏板28复位(步骤S104)。当离合器踏板踩踏量Pc低于Pc3时,随着离合器踏板踩踏量Pc变小,离合器输出转矩Tcout向虚拟发动机输出转矩Teout变化。然后,当离合器踏板踩踏量Pc低于Pc1时,离合器输出转矩Tcout成为虚拟发动机输出转矩Teout。根据这样的离合器踏板28的复位动作,旋转机驱动转矩Tp与离合器踏板28的复位动作对应地向反映了当前的模式的旋转机驱动转矩Tp变化,因此驾驶员能实际感受到使MT车辆的离合器踏板复位时的转矩连接的感觉。
如此,根据本实施方式的电动汽车10,转矩根据离合器踏板28的操作而变化,因此驾驶员能仿真地体感到由手动变速动作实现的MT车辆的独特的动作(behavior)。
4.实施方式的电动汽车的变形例
实施方式的电动汽车10也可以采用如下所述变形后的方案。需要说明的是,以下对几个变形例进行说明,但也可以采用这些变形例适当组合而成的构造。
4-1.变形例1:
电动汽车10也可以被配置为能在MT行驶模式和EV(Electric Vehicle:电动车辆)行驶模式之间进行切换,该MT行驶模式是进行伴有仿真的手动变速动作的行驶的模式,该EV行驶模式是进行不伴有仿真的手动变速动作的一般的EV行驶的模式。在该情况下,电动汽车10具备通过开关等在MT行驶模式和EV行驶模式之间进行切换的构成即可。
此外,在电动汽车10具备进行到目的地为止的自主行驶的自动驾驶功能的情况下,除了MT行驶模式和EV行驶模式之外,还可以具备进行自主行驶的自主行驶模式。根据这样的切换行驶模式的构成,能进行与使用目的相应的行驶模式的切换,因此,能应对多样的使用方式,例如在由父亲、母亲以及孩子三人使用该电动汽车10的情况下,父亲驾驶时选择MT行驶模式,母亲驾驶时选择EV行驶模式,孩子驾驶时选择自主行驶模式等。
4-2.变形例2:
在MT车辆中,如果不踩踏离合器踏板则无法变更挡位。因此,在本实施方式的电动汽车10中,为了接近MT车辆的实际的操作感,也可以采用仅在驾驶员踩踏了离合器踏板28时允许由换挡杆26的操作进行的模式的选择动作的构成。这样的构成例如设为ECU50允许仅将在离合器踏板踩踏量Pc大于规定的踩踏量Pcth的情况下被输入的换挡位置Gp作为最新的换挡位置而写入存储器54的构成即可。
需要说明的是,在MT车辆中,通常,即使不踩踏离合器踏板,也能进行向空挡位置的挡位的变更。因此,在本实施方式的电动汽车10中,与MT车辆同样地,也可以采用不论有无离合器踏板28的踩踏都允许向空挡位置的模式的变更的构成。由此,能更接近MT车辆的手动变速动作的操作感。
4-3.变形例3:
在电动汽车10中,只要在旋转机2的输出范围内,就能自由地设定转矩特性。因此,在本实施方式的电动汽车10中,也可以采用设为具备多个种类的与多个模式对应的转矩特性的预设式样(pattern),并能从该预设式样中选择驾驶员喜好的预设式样的构成。
图7是举例示出了与多个模式对应的旋转机的转矩特性的图。在该图中,举例示出了转矩特性的第一预设式样和被设定为比第一预设式样更密齿轮比(close ratio)的转矩特性的第二预设式样。在ECU50的存储器54中分别存储有与第一预设式样对应的传动比的计算映射图和与第二预设式样对应的传动比的计算映射图。驾驶员对车内的模式切换开关进行操作来选择所希望的式样。式样选择结果被输出至ECU50。需要说明的是,对转矩特性的预设式样的数量及其式样内容没有限定。
除了向传动比计算部508输入换挡位置Gp之外,还向传动比计算部508输入式样选择结果。在传动比计算部508中,使用与式样选择结果对应的传动比的计算映射图来计算与所输入的换挡位置Gp对应的传动比。根据这样的构成,驾驶员能根据当天的心情来选择转矩特性的式样。由此,能实现符合驾驶员的心情的驾驶感觉。
4-4.变形例4:
与多个模式对应的转矩特性也可以被配置为能由驾驶员任意地设定。在以下的说明中,将由驾驶员设定转矩特性的处理记为“转矩特性设定处理”,将所设定的转矩特性的式样记为“用户预设式样”。图8是表示与转矩特性设定处理有关的构成和功能的框图。如图8所示,用户预设式样例如可以使用触摸面板60来设定。触摸面板60具备:输入装置62,接收显示器上的接触操作来作为输入信息;以及输出装置64,在显示器上显示输出信息。ECU50具备转矩特性设定部512来作为执行转矩特性设定处理的功能块。转矩特性设定部512基于由驾驶员从输入装置62输入的输入信息来设定用户预设式样,并将该结果输出至输出装置64。
图9是表示使用了触摸面板的转矩特性设定处理的一个例子的图。在转矩特性设定处理中,转矩特性设定部512使如图9所示的转矩特性曲线的基础式样显示于触摸面板60的输出装置64。可以是基础式样由驾驶员从已存储的预设式样中选择的构成,也可以是转矩特性设定部512使任意的基础式样显示。
当驾驶员对显示于触摸面板60的基础式样的转矩曲线进行触摸和拖拽(touch-and-drag)等操作时,该信息作为输入信息被输入至转矩特性设定部512。转矩特性设定部512基于输入信息来使转矩曲线向驾驶员所拖拽的方向变形。转矩特性设定部512使变形后的转矩曲线显示于输出装置64。在图9中举例示出了驾驶员使6挡的高速旋转区域向旋转机驱动力增大的方向变化的情况。根据这样的转矩特性设定处理,驾驶员能设定符合喜好的任意的用户预设式样。
需要说明的是,在上述的变形例中,对驾驶员将基础式样变形为任意的式样的例子进行了说明,但也可以是由驾驶员使用触摸面板60的输入装置62从零开始设定式样的构成。此外,输入装置62也不限于触摸面板60,也可以是使用由按钮实现的输入、语音输入等其他输入方式的构成。
4-5.变形例5:
也可以设为附加发动机声来进一步增强正在驾驶搭载发动机的MT车辆的感觉。这样的构成例如设为ECU50生成与虚拟发动机转速Ne相应的发动机声并从扬声器输出该发动机声的构成即可。需要说明的是,发动机声例如可以被配置为能从与发动机型号相应的多个种类中选择驾驶员喜好的发动机声。在该情况下,ECU50基于由驾驶员选择出的发动机型号(例如V8)和虚拟发动机转速Ne来生成模仿了所选择的发动机型号的声音的发动机声即可。根据这样的构成,能实现驾驶员一边驾驶电动汽车10一边享受V8声音这样的多样的使用方式。此外,由于根据虚拟发动机转速Ne生成了发动机声,因此也能再现MT车辆中的空转、半离合等状况的发动机声。
4-6.变形例6:
本实施方式的电动汽车10不限于四轮的MT车辆,也可以被配置为二轮的MT车辆。一般的二轮的MT车辆具备用手操作的离合器杆和用脚操作的换挡踏板。因此,在作为电动汽车10的二轮车辆中,被配置为使换挡踏板具有换挡装置的功能来代替四轮车辆的换挡杆26,使离合器杆具有离合器装置的功能来代替四轮车辆的离合器踏板28即可。由此,能在电动自动二轮车中仿真地再现MT车辆的手动变速动作。
5.其他
本发明的电动汽车也可以如下所述地配置。
一种电动汽车,具备向车轮传递转矩的旋转机,不具备发动机以及连结于该发动机的变速器和离合器机构,所述电动汽车的特征在于,具备:
换挡装置,由驾驶员操作,用于模拟所述变速器的操作;
离合器装置,在所述换挡装置的操作时由驾驶员操作,用于模拟所述离合器机构的操作;以及
转矩控制部,控制所述旋转机的转矩,
所述换挡装置被配置为:从所述旋转机的相对于转速的转矩特性分级地不同的多个模式中选择一个模式,并将包含所选择的模式的信号输出至所述转矩控制部,
所述离合器装置被配置为将包含所述离合器装置的操作量的信号输出至所述转矩控制部,
所述转矩控制部基于包含所述离合器装置的操作量的信号和包含由所述换挡装置选择出的模式的信号来控制所述旋转机的转矩。
- 电动汽车的经济模式、电动汽车的控制方法、电动汽车控制系统及电动汽车
- 非承载式电动汽车车架连接点确定方法与非承载式电动汽车车架及电动汽车