控制非线性闭环系统的方法及其主动控制器的设计方法
文献发布时间:2023-06-19 12:13:22
技术领域
本发明涉及控制技术领域,具体而言,涉及一种控制非线性闭环系统的方法及其主动控制器的设计方法。
背景技术
减振设计是机械设计中的基础领域,其目的是抑制车身的振动从而在保证乘坐舒适性与车辆方向操纵能力的前提下,控制车辆在运动时轮胎的受力以及产生的冲击噪声的数值。
为了将减震效果控制在4Hz-8Hz,且人体感受到的振动频率满足ISO2631条款对人体敏感频率范围的规定,而将研究重点放在了对簧下质量与道路状态的控制与测量上。因此需要采用传感器进行测量并通过复杂的控制律进行计算与控制。现有技术例如天棚控制方法,存在忽视簧下质量的振动与对方向操纵能力造成影响的问题;一些对天棚控制进行改进的方法和控制主动力的方法也是在假定所有数据均可测量出绝对数值的情况下才可实现,然而普通的传感器仅能测出部分数据的相对数值。现有技术大多没有研究非线性系统,然而车辆上的大部分零件,例如弹簧和减震器的振动特征均为非线性的。
因此需要提供一种主动控制方法,在保证良好的车辆乘坐舒适性与抓地能力的前提下,采用相对信息即可对非线性系统进行分析与控制。
发明内容
本发明旨在提供一种基于相对信息对非线性闭环系统的主动控制器设计方法,能够实现使用相对信息对非线性闭环系统进行主动控制。
本发明的结构特征和其优点将通过下面的详细描述变得显然,或部分地通过本发明的实践而习得。
根据本发明的一方面,提出一种控制非线性闭环系统的主动控制器的设计方法,包括以下步骤:
根据机械结构建立哈密顿模型;
根据所述哈密顿模型建立互联-阻尼配置的无源控制系统;
根据所述互联-阻尼配置的无源控制系统设计使用相对信息的用于非线性闭环系统的主动控制器模型;
对所述主动控制器模型的参数进行调控;
得到最终主动控制器。
根据一些实施例,所述非线性闭环系统为二自由度悬架模型系统。
根据一些实施例,所述哈密顿模型为:
,
根据一些实施例,所述互联-阻尼配置的无源控制系统下的目标哈密顿函数为:
其中
根据一些实施例,所述主动控制器模型的控制输入表达式为:
其中
根据一些实施例,所述互联-阻尼配置的无源控制系统下的目标势能表达式为:
其中
根据一些实施例,所述互联-阻尼配置的无源控制系统的消耗系数为:
其中,
其中,
根据一些实施例,所述对所述控制器中的参数进行调控步骤,包括:
A:确定消耗系数;
B:设计大于预定值的
C:计算
D:设计函数
E1:若目标系统的
E2:若目标系统的
根据一些实施例,所述互联-阻尼配置的无源控制系统的特点为:
根据本发明的另一方面,提出一种控制非线性闭环系统的方法,所述方法包括:
通过前面任一项所述的方法建立主动控制器;
利用所述主动控制器控制非线性闭环系统。
根据一些实施例,通过采用相对信息建立控制系统,简化了数据测量阶段的工作量与工作难度,使普通的传感器就能较易获得所需数据。
根据一些实施例,通过使用本发明的控制器可实现对非线性系统的有效分析控制,从而对车辆系统中的大部分具有非线性特征的零件实施控制。在保证良好的车辆乘坐舒适性与抓地能力的前提下,实现了更佳的减震效果。
根据一些实施例,通过控制器参数设计方法,对参数进行调控,从而形成闭环主动控制系统,使系统能够得到目标控制器实现期望的减震效果。
应当理解的是,以上的一般描述和后文的细节描述仅是示例性的,并不能限制本发明。
附图说明
通过参照附图详细描述其示例实施例,本发明的上述和其它目标、特征及优点将变得更加显而易见。
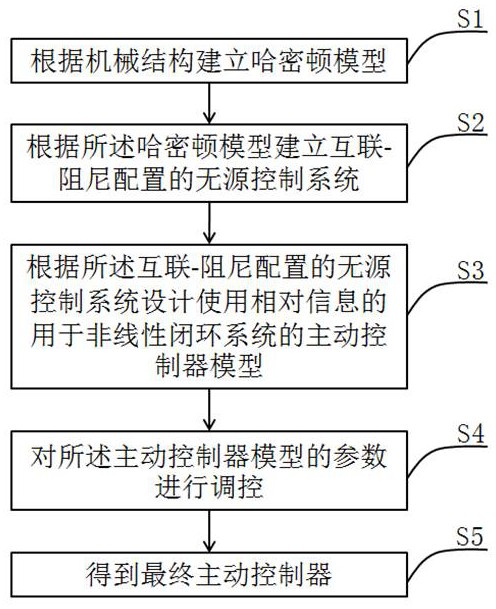
图1示出根据一示例性实施例的控制非线性闭环系统的主动控制器的设计方法的设计流程图。
图2示出根据一示例性实施例的控制非线性闭环系统的主动控制器的设计方法的参考机械结构。
图3示出根据一示例性实施例的控制非线性闭环系统的主动控制器的设计方法的参数调控过程图。
图4示出根据一示例性实施例的控制非线性闭环系统的主动控制器的设计方法的控制系统与目标系统对应模型简图。
图5示出根据一示例性实施例的控制非线性闭环系统的主动控制器的设计方法的簧上质量加速度对比图。
图6示出根据一示例性实施例的控制非线性闭环系统的主动控制器的设计方法的车轮挠度对比图。
图7示出根据一示例性实施例的控制非线性闭环系统的主动控制器的设计方法的控制系统展示图。
具体实施方式
现在将参考附图更全面地描述示例实施例。然而,示例实施例能够以多种形式实施,且不应被理解为限于在此阐述的实施例;相反,提供这些实施例使得本发明将全面和完整,并将示例实施例的构思全面地传达给本领域的技术人员。在图中相同的附图标记表示相同或类似的部分,因而将省略对它们的重复描述。
此外以下实施例或者附图用于说明本发明,但不用来限制本发明的范围,以下附图仅是设计的一种可能,其结构可不只此一种。
本领域技术人员可以理解,附图只是示例实施例的示意图,附图中的结构并不一定是实施本发明所必须的,因此不能用于限制本发明的保护范围。
对于减振问题为了获得更优的抑振效果而常采用主动控制的方法,但主动控制方法在多数情况下需要对控制系统进行正确建模。然而一方面,控制对象的参数非常容易变动,特别是减振器等控制系统的衰减系数可能会因速度的不稳定和长时间的工作而发生较大的变化;另一方面,几乎所有的主动振动控制方法均需要绝对信息,即控制对象的绝对位移,但廉价的传感器只能测定相对信息。虽然可使用特定观察仪来测定绝对信息,但该方法难以应用于非线性情况。
哈密顿模型即哈密顿函数。其原理是通过作用量变分寻找系统运动方程。对于线性系统,可直接通过拉格朗日方程得出系统的振动微分方程,之后用特征值法求得精确解析解;对于非线性系统,一般无法得到解析解,因此需引入相空间,研究系统在相空间中的行为,而该研究过程则需要利用哈密顿函数来求得振动微分方程。
互联-阻尼配置的无源控制方法,是无源控制技术中的一种,简称为IDA-PBC。依据该方法的控制器设计在机械、电子和机电系统中均有广泛的应用。IDA-PBC控制系统可用于调节非线性系统的行为,使之成为具有期望结构的闭环端口哈密顿系统。IDA-PBC控制系统的目标是寻求一个具有期望的端口哈密顿结构的闭环系统控制器,即主要适用于解决非线性系统的镇定问题。
鲁棒性是无源控制所要考虑的特性之一。在实际系统中常存在不确定参数与外界扰动,而在此状态下,控制器若能保证系统的稳定性,则称该控制器具有鲁棒性。
因此本发明提供了一种基于相对信息对非线性闭环系统的主动控制器设计方法,在保证良好的车辆乘坐舒适性与抓地能力的前提下,采用主动控制。通过哈密顿与IDA-PBC控制理论建立可应用于非线性系统的闭环控制器,且该控制器采用相对信息。通过研究各参数对系统效果的影响,制定控制器参数设计方法,对各参数进行调控从而得出最优解。
下面将参照附图,对根据本申请实施例的控制非线性闭环系统的主动控制器的设计方法进行详细说明。
图1示出根据一示例性实施例的控制非线性闭环系统的主动控制器的设计方法的设计流程图。
图2示出根据一示例性实施例的控制非线性闭环系统的主动控制器的设计方法的参考机械结构。
参见图1,根据一示例实施例的控制非线性闭环系统的主动控制器的设计方法,包括以下步骤:S1根据机械结构建立哈密顿模型;S2根据所述哈密顿模型建立互联-阻尼配置的无源控制系统;S3根据所述互联-阻尼配置的无源控制系统设计使用相对信息的用于非线性闭环系统的主动控制器模型;S4对所述主动控制器模型的参数进行调控;S5得到最终主动控制器。
如图2所示,为所研究的机械结构,根据一些实施例,所述机械结构具有P结构110、C结构120、W结构130, P结构110可转动地设置在C结构120上, C结构120可移动地设置在W结构130上,
根据一些实施例,所研究的机械结构可为图2中所示的结构,但不限于此。
如图2所示,根据一些实施例,
如图1、图2所示,根据一些实施例,S1根据机械结构建立哈密顿模型的过程包括以下步骤。
根据一些实施例,所述哈密顿模型为:
根据一些实施例,S2根据所述哈密顿模型建立互联-阻尼配置的无源控制系统的过程包括以下步骤。
根据一些实施例,互联-阻尼配置的无源控制系统简称IDA-PBC控制系统。
根据一些实施例,所选系统为非线性系统。假设附加势能
从而制定目标IDA-PBC控制系统可表达为:
如图1所示,S3根据所述互联-阻尼配置的无源控制系统设计使用相对信息的用于非线性闭环系统的主动控制器模型的过程包括以下步骤。
根据一些实施例,所述互联-阻尼配置的无源控制系统下的目标哈密顿函数为:
其中
根据一些实施例,
根据一些实施例,通过目标控制系统的动力学和控制系统的动力学,可以导出具有目标系统参数的方程式和有不等式约束的反馈定律的方程式为:
式(40)的每项均为四维向量。式(40)的前两组成部分已经满足了所有x和
第四组成部分为:
通过对式(40)的第三组成部分中的
根据一些实施例,为了方便运算可设定:
则:
其中,
根据一些实施例,为了方便运算可设定:
其中,
其中,
根据一些实施例,所述互联-阻尼配置的无源控制系统的消耗系数为下述所述。其中,
根据式(40)的第三组成部分中的
根据式(40)的第三组成部分中的其他部分得到势能方程:
根据一些实施例,所述互联-阻尼配置的无源控制系统下的目标势能表达式为下述过程所示。公式(41)的通解为:
其中
根据一些实施例,通过求解关于输入u的公式(40),可得到反馈率
其中
其中,
因此将其再次分解可得到:
通过公式(42)及根据
其中
根据一些实施例,所述互联-阻尼配置的无源控制系统的特点为:
根据一些实施例,根据IDA-PBC控制系统的特点,通过上述过程所得到的闭环系统即所期望的目标系统。因此,通过哈密顿模型的性质可以保证所得系统在无扰动情况下的相对稳定性。因此,需要保证
如图1所示,根据一些实施例,S4对所述主动控制器模型的参数进行调控的过程包括以下步骤:
图3示出根据一示例性实施例的控制非线性闭环系统的主动控制器的设计方法的参数调控过程图。
如图3所示,根据一些实施例,通过实验与观察,发现当
根据一些实施例,所述对所述控制器中的参数进行调控步骤,包括:
A:确定消耗系数;
B:设计大于预定值的
C:计算
D:设计函数
E1:若目标系统的
E2:若目标系统的
根据一些实施例,通过设计
根据一些实施例,在系统的
图4示出根据一示例性实施例的控制非线性闭环系统的主动控制器的设计方法的控制系统与目标系统对应模型简图。
如图4所示,根据一些实施例,非线性表达式下无法明确对应各参数的物理含义,因此图4为线性化之后的结构图。图4a为图2机械结构的控制模型图,该系统可看做为具有调谐质量阻尼器(TMD)的质量弹簧阻尼器系统(MSD);图4b为IDA-PBC控制系统下的目标控制模型图,该系统可看做为具有调谐质量阻尼器(TMD)和多个天棚控制阻尼器的质量弹簧阻尼器系统(MSD)。天棚控制即在车身与云端间具有阻尼给车身施加压力从而达到减震控制效果的控制方法。图4中出现参数与本发明所具有的参数并不完全对应,图4仅展示控制模型的结构特征。
根据一些实施例,所述非线性闭环系统为二自由度悬架模型系统。
图5示出根据一示例性实施例的控制非线性闭环系统的主动控制器的设计方法的簧上质量加速度对比图。
图6示出根据一示例性实施例的控制非线性闭环系统的主动控制器的设计方法的车轮挠度对比图。
如图5、图6所示,根据一些实施例,基于相对信息对非线性闭环系统的主动控制器与传统开环系统和天棚控制系统相比,在簧上质量加速度和轮胎挠度方面均有显着改善,即显著提升车辆在行驶中方向操纵能力的稳定性与乘客乘坐的舒适性。
图7示出根据一示例性实施例的控制非线性闭环系统的主动控制器的设计方法的控制系统展示图。
如图7所示,根据一些实施例,基于相对信息对非线性闭环系统的主动控制器的控制流程与方法为:首先分析所研究机械结构的的运动与能量组成特点;由于是非线性系统,因此利用哈密顿模型对机械结构的运动学模型和动力学模型建立系统哈密顿函数,此时系统如图4a所示,函数所用数据信息均为相对信息;之后根据哈密顿函数建立IDA-PBC控制系统,并得出能够实现控制期望效果下的目标哈密顿函数,期望系统如图4b所示;IDA-PBC控制系统结合系统哈密顿函数和目标哈密顿函数建立能够控制输入u值的控制器;通过建立对该控制器内参数的控制方法,使控制系统成为闭环主动控制系统,循环不断调控参数直到系统变为所期望的目标系统为止,此时得到该目标系统下的控制器,从而达到最佳输出效果。
根据一些实施例,还提出一种控制非线性闭环系统的方法,所述方法包括:通过前面任一项所述的方法建立主动控制器;利用所述主动控制器控制非线性闭环系统。控制器涉及车辆大部分零件所具有的非线性系统,显著提升减震效果且实用性更佳。控制器所使用的数据均为易于测量的相对数据信息,简化了前期准备工作难度。建立控制器参数设计方法,对参数进行调控,从而形成闭环主动控制系统,使系统能够得到目标控制器实现期望的减震效果,提升乘坐舒适度与车辆行驶稳定性。
以上具体地示出和描述了本发明的示例性实施例。应可理解的是,本发明不限于这里描述的详细结构、设置方式或实现方法;相反,本发明意图涵盖包含在所附权利要求的精神和范围内的各种修改和等效设置。
- 控制非线性闭环系统的方法及其主动控制器的设计方法
- 闭环分数阶PDɑ型迭代学习机器人控制器的设计方法及系统