一种甘蔗收获机用入土深度调节机构
文献发布时间:2023-06-19 19:20:08
技术领域
本发明属于甘蔗收获机用入土深度调节机构领域,具体涉及一种甘蔗收获机用入土深度调节机构。
背景技术
甘蔗作为我国重要的糖类作物,主要种植于我国广东、广西和云南等地。2019年,我国甘蔗种植面积约153.33万hm 2,位居世界第3位,在大面积种植时,需要通过智能化的收获机进行机械化作业,可以提升收割效率。
如专利公开号:CN113589709A提出的甘蔗收获机入土切割智能监控系统,该发明公开了一种甘蔗收获机入土切割智能监控系统,包括:车载终端、深度相机、扭矩传感器、温度传感器、位移传感器、旋转编码器、微控制器、仿形检测机构和执行机构;所述控制系统由微控制器采集甘蔗收获机入土切割深度、刀具磨损情况、甘蔗破头率、刀具转速、车辆行驶速度、发动机油液温度六个参数;所述甘蔗收获机入土切割智能监控系统可以将采集数据进行处理并拟合曲线。该发明有效提高了甘蔗收获机信息化、自动化水平,解决了甘蔗收获机入土切割深度不能因地形变化进行自动调整,进而影响切割合格率、甘蔗破头率,提高了甘蔗收获机作业效率,为作业效率的监管提供了技术支持。
但是该专利中需要通过深度相机对土壤观察(采集是否有倒伏的甘蔗,并根据倒伏的甘蔗直径对仿形杆在滑槽内的位置进行调整),但是在实际使用过程中容易被翻起的表层土壤进行干扰,导致数据传输有误(甚至无法采集),造成收割盘的高度调节有误造成对甘蔗根本的破坏,影响收割质量。因此,需要对现有技术进行改进。
发明内容
本发明的目的在于提供一种甘蔗收获机用入土深度调节机构,解决了现有的深度调节机构采集机构对深度感应容易出现失误的问题。
为了达到上述目的,本发明提供一种甘蔗收获机用入土深度调节机构,与甘蔗收获机主体配合使用,包括:土层特征采集机构、控制模块、与甘蔗收获机主体柔性连接的收割盘和与甘蔗收获机主体上通过螺栓连接的安装板,所述安装板上固定连接有安装架,所述安装架的内部滑动连接有连接架,所述连接架上固定连接有姿态传感器;
所述安装板的内部通过轴承安装有转轴,所述转轴上的一端固设有扭簧,另一端连接有调节电机,所述安装架的内部滑动连接有定位柱,所述定位柱的一端固定连接有连接杆,所述连接杆的外侧设置有弹簧,所述连接杆的一端固定连接有移动板;所述转轴的外侧固定连接有弯弧仿形杆,所述弯弧仿形杆的内部转动连接有仿形轮;
所述转轴的一端固定连接有方形块,所述方形块与所述姿态传感器的输入端滑动连接,姿态传感器的输入端上开设有方形槽,该方形槽与方形块滑动连接;
姿态传感器用于采集方形块的转动数据,并发送至控制模块;
控制模块用于根据转动数据生成调节指令并发送至调节电机;
所述调节电机用于根据调节指令转动,并通过转轴驱动扭簧转动。
本发明的原理在于:在甘蔗收获机主体在地面行驶的过程中,仿形轮与地面接触,并带动弯弧仿形杆发生偏转,弯弧仿形杆带动转轴进行转动,转轴在转动的过程中通过方形块带动姿态传感器的输入端进行转动,姿态传感器的输入端在转动后可以将数据转换后传送到车载终端可以通过控制模块经过换算后对收割盘的高度进行调节。
即通过对扭簧进行扭动,扭簧被扭动后产生弹力,通过弹力带动仿形轮对地面上的泥土下压,实现对仿形轮对地压力的调整,可以避免虚浮的泥土影响姿态传感器的判断,并且姿态传感器在土地中使用时,环境中的尘土较大,容易导致姿态传感器的输入出堆积灰尘与泥土,在使用一段时间后,拉动移动板,移动板通过连接杆带动定位柱进行移动,并对弹簧进行压缩,当定位柱脱离连接架后,便可将连接架与姿态传感器从安装架上拆卸下来,从而可以使得姿态传感器更加便于清理。
本发明的有益效果在于:本发明通过在安装板上加设扭簧、姿态传感器与弯弧仿形杆等结构,可以通过扭簧的弹力带动仿形轮对土壤进行压实,然后通过姿态传感器与HC-05模块的计算后反馈到收割盘的位置处,对收割盘的高度进行调节,从而可以避免数据传输有误,并且通过弹簧的弹力推动定位柱对姿态传感器进行安装,在长期使用后可以通过将定位柱脱离连接架便可将姿态传感器方便的拆卸下来进行清理。
进一步,收割盘与甘蔗收获机主体之间设有液压系统,液压系统包括液压缸、供油管路和电磁阀,液压缸包括液压底座和液压推杆,液压缸的液压底座与甘蔗收获机主体固定连接,液压缸的液压推杆与收割盘固定连接,供油管路的一端与液压缸连通,电磁阀设置在供油管路上,电磁阀与控制模块信号连接,电磁阀用于根据控制模块的指令启闭以实现对液压推杆的长度的控制;所述控制模块还用于根据方形块的转动数据生成控制指令,并发送至电磁阀;所述控制模块是利用遗传算法对模糊PID的比例因子进行优化进而利用优化后的模糊PID控制算法生成的控制指令。
遗传算法主要采用实数或二进制编码设定优化对象的字符串,编码方式选用实数编码。将模糊PID中的比例因子视为个体中的基因,系统不断进行在线参数寻优,优化模糊PID的性能。将模型中的3个变量构成一个编码字符串:(Kp、Ki、Kd),这样的字符串即代表种群中一个个体,每个个体都是一个解,并根据设计变量的值域产生初始种群。通过计算当代种群的适应度并进行判断是否为精英个体,若是则进行解码输出模糊PID比例因子的最优解,若否则进行个体间的复制、交叉、变异以获取新个体,在进行种群的合并形成当代种群,重复上述步骤。
进一步,所述转轴与所述安装架通过轴承连接,所述安装架的形状为L型,安装架可以对转轴进行支撑,姿态传感器为霍尔传感器。
进一步,所述扭簧的一端与所述安装板固定连接,所述扭簧的另一端与所述转轴固定连接,扭簧可以通过转轴对弯弧仿形杆施加下压力。
进一步,所述控制模块是利用遗传算法对模糊PID的比例因子进行优化进而利用优化后的模糊PID控制算法生成的调节指令。
进一步,所述移动板与所述安装架接触,所述连接杆与所述安装架滑动连接,所述定位柱与所述连接架滑动连接,移动板可以通过连接杆带动定位柱进行移动。
进一步,所述弹簧的一端与所述定位柱固定连接,所述弹簧的另一端与所述安装架固定连接,弹簧可以通过弹力带动定位柱自动复位。
附图说明
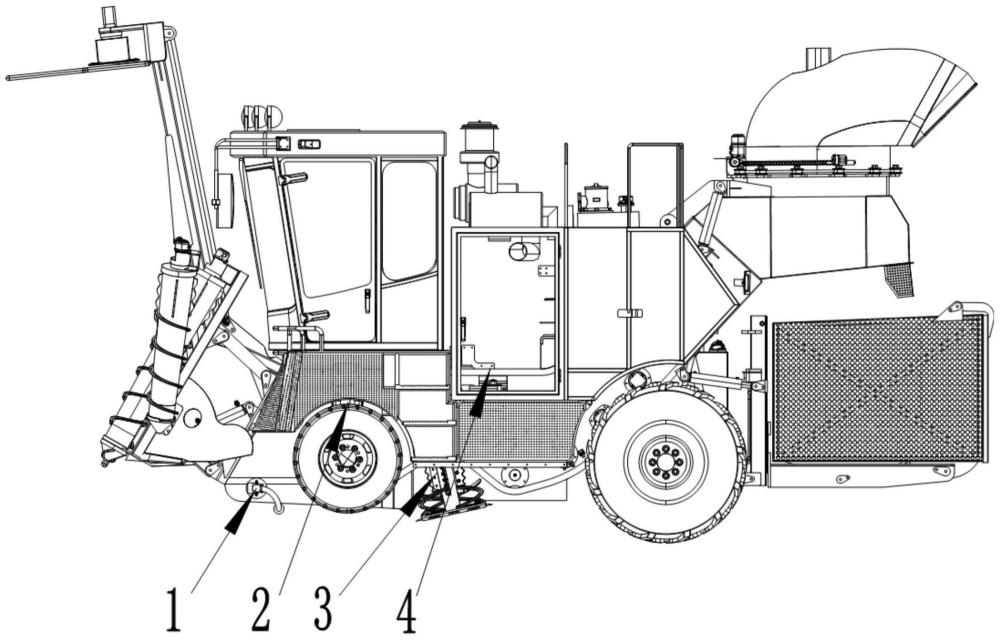
图1为本发明实施例甘蔗收获机用入土深度调节机构的示意图;
图2为本发明实施例甘蔗收获机用入土深度调节机构的图1的深度调节机构立体图;
图3为本发明实施例甘蔗收获机用入土深度调节机构的图2的俯视剖视图;
图4为本发明实施例甘蔗收获机用入土深度调节机构的图3的A部结构放大图。
具体实施方式
下面通过具体实施方式进一步详细说明:
说明书附图中的附图标记包括:甘蔗收获机主体1、土层特征采集机构2、收割盘3、控制模块4、安装板21、安装架22、连接架23、姿态传感器24、转轴25、弯弧仿形杆26、仿形轮27、扭簧28、方形块29、定位柱20、连接杆201、移动板202、弹簧203。
实施例1
如图1、图2所示,本实施例提供一种甘蔗收获机用入土深度调节机构,与甘蔗收获机主体1配合使用,包括,土层特征采集机构2、收割盘3和控制模块4,其中,甘蔗收获机主体1上设置有土层特征采集机构2,甘蔗收获机主体1上设置有收割盘3,甘蔗收获机主体1上通过螺栓连接有安装板21,转轴25的外侧固定连接有弯弧仿形杆26,弯弧仿形杆26的内部转动连接有仿形轮27,仿形轮27可以减少弯弧仿形杆26与地面的摩擦。
如图2、图3、图4所示,安装板21上固定连接有安装架22,安装架22的内部滑动连接有连接架23,连接架23上固定连接有姿态传感器24,安装板21的内部通过轴承安装有转轴25,转轴25上设置有扭簧28,转轴25与安装架22通过轴承连接,安装架22的形状为L型,安装架22可以对转轴25进行支撑,扭簧28的一端与安装板21固定连接,扭簧28的另一端与转轴25固定连接,扭簧28可以通过转轴25对弯弧仿形杆26施加下压力。
如图2、图3、图4所示,安装架22的内部滑动连接有定位柱20,定位柱20的一端固定连接有连接杆201,连接杆201的外侧设置有弹簧203,连接杆201的一端固定连接有移动板202,转轴25的一端固定连接有方形块29,方形块29与姿态传感器24的输入端滑动连接,姿态传感器24的输入端上开设有方形槽,该方形槽与方形块29滑动连接,移动板202与安装架22接触,连接杆201与安装架22滑动连接,定位柱20与连接架23滑动连接,移动板202可以通过连接杆201带动定位柱20进行移动,弹簧203的一端与定位柱20固定连接,弹簧203的另一端与安装架22固定连接,弹簧203可以通过弹力带动定位柱20自动复位。
本发明具体实施过程如下:在甘蔗收获机主体1在地面行驶的过程中,仿形轮27与地面接触,并带动弯弧仿形杆26发生偏转,弯弧仿形杆26带动转轴25进行转动,转轴25在转动的过程中通过方形块29带动姿态传感器24的输入端进行转动,姿态传感器24的输入端在转动后可以将数据转换后传送到车载终端可以通过HC-05模块的内部,然后经过换算后对收割盘3的高度进行调节,并且对扭簧28进行扭动,扭簧28被扭动后产生弹力,通过弹力带动仿形轮27对地面上的泥土下压,可以避免虚浮的泥土影响姿态传感器24的判断,并且姿态传感器24在土地中使用时,环境中的尘土较大,容易导致姿态传感器24的输入出堆积灰尘与泥土,在使用一段时间后,拉动移动板202,移动板202通过连接杆201带动定位柱20进行移动,并对弹簧203进行压缩,当定位柱20脱离连接架23后,便可将连接架23与姿态传感器24从安装架22上拆卸下来,从而可以使得姿态传感器24更加便于清理。
本发明通过在安装板21上加设扭簧28、姿态传感器24与弯弧仿形杆26等结构,可以通过扭簧28的弹力带动仿形轮27对土壤进行压实,然后通过姿态传感器24与HC-05模块的计算后反馈到收割盘3的位置处,对收割盘3的高度进行调节,从而可以避免数据传输有误,并且通过弹簧203的弹力推动定位柱20对姿态传感器24进行安装,在长期使用后可以通过将定位柱20脱离连接架23便可将姿态传感器24方便的拆卸下来进行清理。
实施例2
与实施例1相比,不同之处仅在于,收割盘与甘蔗收获机主体之间设有液压系统,液压系统包括液压缸、供油管路和电磁阀,液压缸包括液压底座和液压推杆,液压缸的液压底座与甘蔗收获机主体固定连接,液压缸的液压推杆与收割盘固定连接,供油管路的一端与液压缸连通,电磁阀设置在供油管路上,电磁阀与控制模块信号连接,电磁阀用于根据控制模块的指令启闭以实现对液压推杆的长度的控制;所述控制模块还用于根据方形块的转动数据生成控制指令,并发送至电磁阀;所述控制模块是利用遗传算法对模糊PID的比例因子进行优化进而利用优化后的模糊PID控制算法生成的控制指令。
具体的,遗传算法主要采用实数或二进制编码设定优化对象的字符串,编码方式选用实数编码。将模糊PID中的比例因子视为个体中的基因,系统不断进行在线参数寻优,优化模糊PID的性能。将模型中的3个变量构成一个编码字符串:(Kp、Ki、Kd),这样的字符串即代表种群中一个个体,每个个体都是一个解,并根据设计变量的值域产生初始种群。通过计算当代种群的适应度并进行判断是否为精英个体,若是则进行解码输出模糊PID比例因子的最优解,若否则进行个体间的复制、交叉、变异以获取新个体,在进行种群的合并形成当代种群,重复上述步骤。
需要提前说明的是,在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
以上所述的仅是本发明的实施例,方案中公知的具体结构及特性等常识在此未作过多描述。应当指出,对于本领域的技术人员来说,在不脱离本发明结构的前提下,还可以作出若干变形和改进,这些也应该视为本发明的保护范围,这些都不会影响本发明实施的效果和专利的实用性。本申请要求的保护范围应当以其权利要求的内容为准,说明书中的具体实施方式等记载可以用于解释权利要求的内容。
- 一种甘蔗收获机切割器入土切割深度智能采集系统及方法
- 一种元胡收获机挖掘铲入土角旋转调节机构