非极限状态二维边坡稳定性评价方法
文献发布时间:2023-06-19 09:27:35
技术领域
本发明属于岩土体边坡稳定性分析及防灾减灾技术领域,涉及一种非极限状态二维边坡稳定性评价方法。
背景技术
边坡稳定性分析及其加固治理问题是一个历史悠久且又充满活力的科学分支,自人类产生后,人类与滑坡灾害作斗争的努力一直没有中断过。长期以来,边坡稳定性的分析方法不断发展,出现了各种不同种类的方法。如条分法、数值分析方法、塑性极限方法、可靠度法、模糊数学法、地质类比法等。
边坡稳定性分析通常以极限平衡法和有限元法为主。极限平衡法是将边坡稳定问题当作刚体平衡问题来研究,即将组成滑坡体的岩土体视为在复杂状态下的刚体。许多学者假定了岩土块之间接触面上作用力的方向,分布情况及作用位置等,进而衍生出了多种不同类型的极限平衡法。但这些方法都有着众多的假定,尤其是假设了滑移面的形状,极大限制了极限平衡法的应用范围。近年来随着计算机的发展,国内外在进行边坡稳定性分析时逐渐开始使用限元法与计算机相结合的方法,能更好的对滑移面进行确定,进而对边坡稳定性有了更加准确的分析。一些学者已经做出了一些研究,如在用有限元分析建立应力场的基础上,采用蚂蚁算法搜索出更接近实际情况的滑移面从而对边坡稳定性进行分析,但这种算法有着收敛慢、容易陷入局部最优的缺点。除此以外还有在已知应力场的情况下,使用多种群遗传算法构建适应度函数搜索最危险滑移面,达到边坡稳定性分析的目的,但这类算法有着编程过程复杂、交叉率和变异率等参数通常需要靠经验选择的缺点,不易推广应用。
发明内容
本发明的目的是解决现有技术中存在的问题,提供一种非极限状态二维边坡稳定性评价方法。
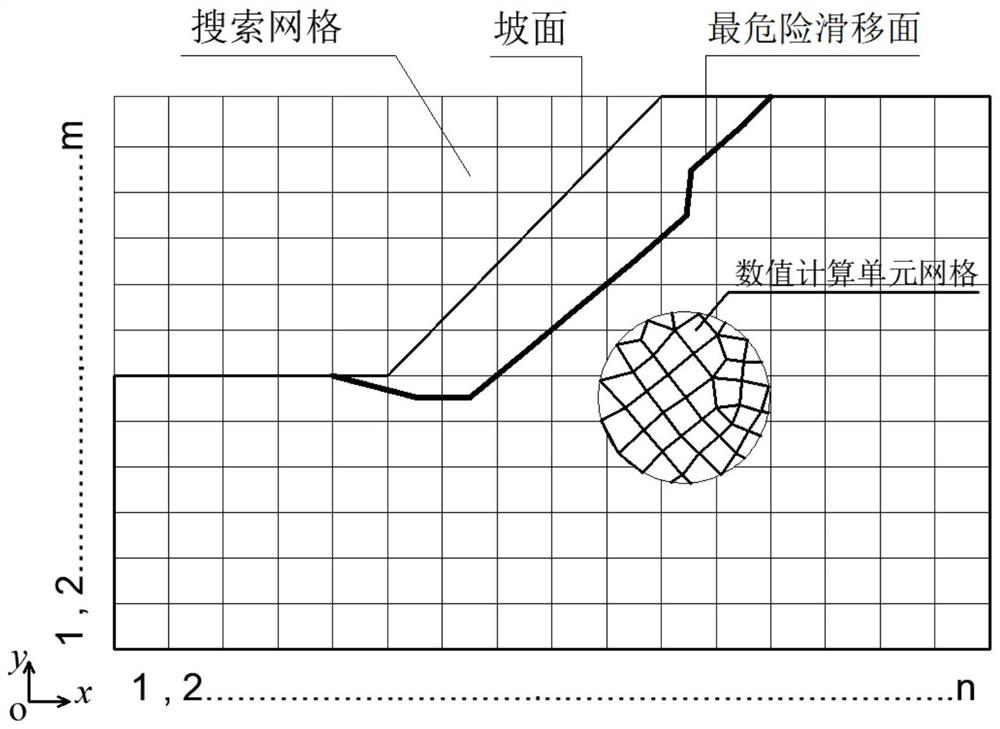
本发明的整体思路为:首先,根据所求解二维边坡的几何尺寸建立二维直角坐标系,将二维边坡宽和高所围成的最小矩形离散为若干个搜索网格,每个搜索网格内可包含一个或多个原有数值计算单元,搜索网格横向成行,竖向成列,并依次按顺序标记;然后,通过基于数值计算获得的二维边坡应力应变场,在每个搜索网格内确定唯一对应的数值计算单元,将其作为目标数值计算单元;接着,在每列搜索网格内从下往上或从上往下根据数值计算应力、应变数值判断最可能达到屈服条件的目标数值计算单元,并标记该目标数值计算单元所在的搜索网格为潜在破坏单元,记录其所在位置坐标及其应力应变值,依次搜索出所有列的潜在破坏单元;最后,将所有的潜在破坏单元在平面内进行连线,得到二维边坡的最危险滑移面,基于生成的最危险滑移面的坐标位置和应力状态,依据安全系数表达式计算二维边坡的局部区域或整体安全系数。
为达到上述目的,本发明采用的技术方案如下:
一种非极限状态二维边坡稳定性评价方法,步骤如下:
(1)建立搜索网格;
建立x轴平行于二维边坡宽且y轴平行于二维边坡高的二维直角坐标系x-y,将二维边坡宽和高所围成的最小矩形离散成n×m个矩形搜索网格,对每个搜索网格进行编号,即完成搜索网格的建立;
m为所有的搜索网格排列形成的平行于x轴的行数,n为所有的搜索网格排列形成的平行于y轴的列数,n、m的取值满足:各搜索网格内包含一个以上数值计算单元;
(2)搜索目标数值计算单元;
设搜索网格j的数值计算单元i的四个顶点为V
①x
②A
其中,x
按此方法,依次确定n×m个矩形搜索网格对应的目标数值计算单元;
若搜索网格内不包含目标数值计算单元,则该搜索网格为无效网格,在计算过程中按零标记,不参与计算过程;
(3)搜索潜在破坏单元;
搜索每列的m个搜索网格对应的目标数值计算单元中同时满足以下两个条件的目标数值计算单元,该目标数值计算单元对应的搜索网格即为该列的潜在破坏单元;进行潜在破坏单元判时,边坡为任意应力状态;
①f≤[f],
②ε
其中,f表示目标数值计算单元的安全系数;[f]表示安全系数允许值,可根据相关规范取值(安全系数允许值为国家规范给定的数值);C为土体的粘聚力;σ表示目标数值计算单元对应的正应力;
τ、σ、ε
如果存在多个目标数值计算单元满足以上两个条件,则将f值最小的目标数值计算单元对应的搜索网格作为潜在破坏单元;如果不存在目标数值计算单元满足以上两个条件,则以包含目标数值计算单元且最靠近该列顶部的搜索网格作为潜在破坏单元;
按此方法,依次确定n列的潜在破坏单元;
(4)将所有潜在破坏单元的中心点顺序连接成线,即形成最危险滑移面在平面内位置线(滑移面即边坡发生破坏时在坡体内形成的一条相对软弱的滑带,坡体沿滑移面土体发生剪切破坏,从而使边坡发生滑动而失稳;实际工程中边坡大部分简化为二维计算,按几何上肯定是生成的一条线,但实际上边坡是三维的,本领域技术人员都把这条线称为最危险滑移面,这是本领域的习惯性说法),同时,按以下公式计算二维边坡安全系数,并将其与参考值进行比较,定量评价边坡稳定性,参考值为与边坡相关的国家及地方规范规定的允许安全系数值;
式中,K
式中,K
此外,需注意的是,上述已经解释过潜在破坏单元为特定的目标数值计算单元对应的搜索网格,搜索网格的应力和应变等于搜索网格中心点对应的目标数值计算单元的应力和应变,本方法认为每个搜索网格内所有点的应力应变值均相同,所以用搜索网格中心点应力应变表示,所以说当网格划分越细时,精度就更高。
作为优选的技术方案:
如上所述的一种非极限状态二维边坡稳定性评价方法,步骤(1)具体如下:
(1.1)根据二维边坡的几何尺寸建立二维直角坐标系x-y,二维边坡宽平行于x轴,二维边坡高平行于y轴;
(1.2)将二维边坡宽和高所围成的最小矩形划分为沿x轴依次排列的n个竖条;
(1.3)将每个竖条划分为沿y轴依次排列的m个横条,至此,二维边坡宽和高所围成的最小矩形离散成n×m个矩形搜索网格;
(1.4)对每个搜索网格进行编号,即完成搜索网格的建立。
如上所述的一种非极限状态二维边坡稳定性评价方法,所有的划分都为均匀划分;所有的搜索网格的大小相等。
如上所述的一种非极限状态二维边坡稳定性评价方法,步骤(1)中,各搜索网格内数值计算单元的个数为1~25,数值计算单元个数越多,计算精度越高,但是计算耗时也随之增加,综合考虑,本发明设置各搜索网格内数值计算单元的个数为1~25。
如上所述的一种非极限状态二维边坡稳定性评价方法,步骤(3)中,搜索每列的m个搜索网格对应的目标数值计算单元中同时满足以下两个条件的目标数值计算单元时,按从下往上或从上往下的顺序。
如上所述的一种非极限状态二维边坡稳定性评价方法,步骤(4)中,与边坡相关的国家及地方规范包括《建筑边坡工程技术规范》GB50330-2013和《建筑基坑支护技术规程》JGJ120-2012。
此外,需要注意的是,本发明中所有公式中符号的单位只要按统一国际单位制取值即可,其中安全系数、应变均是无量纲单位。
有益效果:
(1)相对于极限平衡法,本发明的方法不再局限于传统极限应力状态的假设和滑移面形状假定,能适用于任意应力状态条件下边坡稳定性的定量评价与分析,计算结果更加接近边坡的真实受力情况;
(2)本发明的算法简易,计算效率高,适用计算机编程,紧密结合国家规范,便于基于商业数值分析软件进行边坡稳定性定量分析和评价,更易被推广应用,相比较于有限元法与遗传算法等其它优化技术相结合的分析方法,克服了现有一些复杂算法有收敛慢、容易陷入局部最优,计算效率低,不易推广应用的缺点;
(3)本发明的方法能适应更多的工况,尤其对边坡加固施工过程中的非极限状态边坡稳定性有更强的适用性,计算结果更加接近边坡的真实受力情况,有益于提高边坡稳定性评价的准确性和安全性,有较好的社会效益和经济效益。
附图说明
图1为搜索网格的示意图;
图2为搜索网格j与数值计算单元i的对应关系示意图;
图3为二维边坡有限元计算模型的示意图;
图4为两种方法滑移面位置及形状的对比示意图。
具体实施方式
下面结合具体实施方式,进一步阐述本发明。应理解,这些实施例仅用于说明本发明而不用于限制本发明的范围。此外应理解,在阅读了本发明讲授的内容之后,本领域技术人员可以对本发明作各种改动或修改,这些等价形式同样落于本申请所附权利要求书所限定的范围。
一种非极限状态二维边坡稳定性评价方法,步骤如下:
(1)建立搜索网格;
建立x轴平行于二维边坡宽且y轴平行于二维边坡高的二维直角坐标系x-y,将二维边坡宽和高所围成的最小矩形离散成n×m个大小相等的如图1所示的矩形搜索网格,对每个搜索网格进行编号,以实现搜索过程控制,即完成搜索网格的建立;m为所有的搜索网格排列形成的平行于x轴的行数,n为所有的搜索网格排列形成的平行于y轴的列数,n、m的取值满足:各搜索网格内包含一个以上数值计算单元(优选包含1~25个数值计算单元),此处数值计算单元指建立数值模型时划分的计算单元;具体步骤如下:
(1.1)根据二维边坡的几何尺寸建立二维直角坐标系x-y,二维边坡宽平行于x轴,二维边坡高平行于y轴;
(1.2)将二维边坡宽和高所围成的最小矩形均匀划分为沿x轴依次排列的n个竖条;
(1.3)将每个竖条均匀划分为沿y轴依次排列的m个横条,至此,二维边坡宽和高所围成的最小矩形离散成n×m个大小相等的矩形搜索网格;
(1.4)对每个搜索网格进行编号,即完成搜索网格的建立;
(2)搜索目标数值计算单元;
如图2所示,设搜索网格j的数值计算单元i的四个顶点为V
①x
②A
其中,x
按此方法,依次确定n×m个矩形搜索网格对应的目标数值计算单元;
若搜索网格内不包含目标数值计算单元,则该搜索网格为无效网格,在计算过程中按零标记,不参与计算过程;
(3)搜索潜在破坏单元;
按从下往上或从上往下的顺序搜索每列的m个搜索网格对应的目标数值计算单元中同时满足以下两个条件的目标数值计算单元,该目标数值计算单元对应的搜索网格即为该列的潜在破坏单元;
①f≤[f],
②ε
其中,f表示目标数值计算单元的安全系数;[f]表示安全系数允许值,可根据相关规范取值(安全系数允许值为国家规范给定的数值);C为土体的粘聚力;σ表示目标数值计算单元对应的正应力;
τ、σ、ε
如果存在多个目标数值计算单元满足以上两个条件,则将f值最小的目标数值计算单元对应的搜索网格作为潜在破坏单元;如果不存在目标数值计算单元满足以上两个条件,则以包含目标数值计算单元且最靠近该列顶部的搜索网格作为潜在破坏单元;
按此方法,依次确定n列的潜在破坏单元;
(4)将所有潜在破坏单元的中心点顺序连接成线,即形成最危险滑移面在平面内位置线(滑移面即边坡发生破坏时在坡体内形成的一条相对软弱的滑带,坡体沿滑移面土体发生剪切破坏,从而使边坡发生滑动而失稳;实际工程中边坡大部分简化为二维计算,按几何上肯定是生成的一条线,但实际上边坡是三维的,本领域技术人员都把这条线称为最危险滑移面,这是本领域的习惯性说法),同时,按以下公式计算二维边坡安全系数,并将其与参考值进行比较,定量评价边坡稳定性,参考值为与边坡相关的国家及地方规范(包括《建筑边坡工程技术规范》GB50330-2013和《建筑基坑支护技术规程》JGJ120-2012)规定的允许安全系数值;
式中,K
式中,K
此外,需注意的是,上述已经解释过潜在破坏单元为特定的目标数值计算单元对应的搜索网格,搜索网格的应力和应变等于搜索网格中心点对应的目标数值计算单元的应力和应变,本方法认为每个搜索网格内所有点的应力、应变值均相同,所以用搜索网格中心点应力、应变表示,所以说当网格划分越细时,精度就更高。
本发明的方法除了得到整体安全系数值以外,还可以得到局部区域安全系数值,可为边坡局部或分区开挖及加固设计提供科学的计算依据,相对于传统方法具有更强的适用性和计算优势,现结合具体案例进行说明,具体如下:
1、建立有限元计算模型及获取应力应变场
采用澳大利亚计算机协会(ACADS)所提供的考题为例,该边坡为一个均质边坡,坡比为1:2,该算例通常被国内外学者们用来检验二维边坡数值计算模型的可行性,算例边坡的尺寸、边界条件等具体情况如图3所示,详细土层参数见表1。
表1
(以上表中的参数都是数值计算需要的,C、
如图3所示,利用商业有限元软件建立的二维边坡数值计算模型(数值计算方法有很多种,有限元方法是其中常用的一种,本方法也同样适用于其它数值计算方法,只要能得到应力应变场的方法就可以,本例中是用有限元方法,所以写有限元计算模型)宽度方向为40m,高度方向为20m,该模型荷载只考虑自重,其边界约束条件为:上边界自由无约束条件,左右边界进行水平约束,下边界进行水平及竖向约束。采用非线性静力分析,计算得到边坡的应力场和应变场。
2、计算结果对比分析
基于该算例先采用极限平衡法计算得到最危险滑移面及安全系数,再采用本发明提出技术方法进行边坡稳定性分析,得到最危险滑移面及安全系数。通过对滑移面位置、形状、安全系数比较分析得到两种方法的计算结果和差异,具体过程不再叙述。两种方法滑移面位置、形状及安全系数的对比结果如图4和表2所示。
图4中分别绘出了极限平衡方法及本发明方法得到的滑移面位置及形状。极限平衡方法通常都假定滑移面为圆弧曲线,形状规则,滑移面位置通过圆心及半径确定,且假定必须滑移面土体均处于极限应力状态,计算只能得到整体安全系数。本发明方法未对滑移面形状做出假设,也未假定滑移面土体均处于极限应力状态,通过计算可得到任意形状的滑移面,而且可分不同区域得到局部安全系数和整体安全系数。图4中滑移面形状体现出了本发明方法适用于非极限应力状态时边坡稳定性分析,所得滑移面形状更加接近实际。
表2给出了极限平衡方法及本发明方法得到的安全系数计算结果。
表2
从表2可以看出本发明方法计算所得边坡稳定评价的整体安全系数和极限平衡法经典算例的答案相差不大,整体安全系数均小于1.0,边坡处于不稳定状态。极限平衡法所计算的结果相对较小,这是由于极限平衡法的种种假设导致其结果较为保守。然而,本发明方法除了得到整体安全系数值以外,还可以得到局部区域安全系数值,可为边坡局部或分区开挖及加固设计提供科学的计算依据。由此可见,本发明方法相对于传统极限平衡方法具有更强的适用性和计算优势。
- 非极限状态二维边坡稳定性评价方法
- 基于块分系统的边坡稳定性二维极限分析下限解法