一种基于材料热胀冷缩原理的二自由度微动平台装置
文献发布时间:2023-06-19 09:30:39
技术领域
本发明涉及机器人精密定位技术领域,尤其涉及一种基于材料热胀冷缩原理的二自由度精密定位平台装置。
背景技术
传统的机机械定位系统由于存在传动间隙,定位精度低,较难以突破微米级精度的瓶颈。为了满足高精度的需求,尤其在实现智能机器人的精细动作时,需要一种高精度精密定位系统。
发明内容
本发明的目的是针对传统机械微动平台传动机构存在间隙,很难突破微米级精度的瓶颈的问题,提出一种基于材料热胀冷缩原理的二自由度微动平台装置,其能够通过控制热致伸缩轴的温度,使热致伸缩轴产生精准的热变形,间接地控制平台的位置,可将定位精度提高到纳米级。
为了实现上述目的,本发明采用的技术方案为,一种基于材料热胀冷缩原理的二自由度微动平台装置,包括基座、X向导轨、Y向导轨、X平台、Y平台、X向热致伸缩轴、Y向热致伸缩轴、电热丝、电热丝控制器、运动控制卡、数据采集卡、计算机,基座与Y向导轨固定装配在机架上,Y平台可滑动装配在Y向导轨上,Y向热致伸缩轴的一端固定安装在基座上,另一端与Y平台的底部侧壁固定安装,Y向热致伸缩轴能够带动Y平台在Y向导轨上升降滑动,X向导轨固定装配在Y平台上,X平台可滑动装配在X向导轨上,X向热致伸缩轴的一端与X平台的侧壁固定安装,另一端固定安装在Y平台上,X向热致伸缩轴能够带动X平台在X向导轨上左右滑动;在X向和Y向热致伸缩轴中布设温度传感器,电热丝均匀缠绕在X向和Y向热致伸缩轴的外壁上,电热丝电性连接电热丝控制器,温度传感器电性连接数据采集卡,电热丝控制器通信连接运动控制卡,数据采集卡和运动控制卡通信连接计算机。
作为本发明的一种改进, 所述X向导轨和Y向导轨在水平面的投影夹角为90度。
作为本发明的一种改进, 所述温度传感器设置在X向热致伸缩轴和Y向热致伸缩轴的中部位置。
作为本发明的一种改进,所述X向热致伸缩轴和Y向热致伸缩轴的两端部均套设有隔热垫。
作为本发明的一种改进, 还包括水泵、水泵控制器,X向热致伸缩轴和Y向热致伸缩轴的内部开设有流体流道,在X向热致伸缩轴和Y向热致伸缩轴的侧壁上位于流体流道的两端分别开设进液口和出液口,水泵安装在进液口处的管道中,水泵通过导线电性连接水泵控制器,水泵控制器通信连接运动控制卡,通过控制水泵启停和转速定时定量向X向热致伸缩轴或Y向热致伸缩轴内部输送流动的冷却液。
作为本发明的一种改进,所述流体流道的长度与X向热致伸缩轴或Y向热致伸缩轴的长度基本保持一致。
作为本发明的一种改进, 所述Y平台上设有定位块,X向热致伸缩轴的端部固定装配在定位块上。
作为本发明的一种改进, 所述X向导轨和Y向导轨的数量为2-6个。
相对于现有技术,本发明的装置整体结构设计巧妙,结构合理稳定,有效解决了传统机械精密定位机构精度有限、价格昂贵、维修难度大且易损坏的问题,利用本微动定位平台装置,一方面可将定位精度大幅度提高,只需精准地控制X向热致伸缩轴或Y向热致伸缩轴的温度即可,使得X向热致伸缩轴或Y向热致伸缩轴发生受热变形而产生位移;另一方面本装置结构简单,易于实现和使用,成本低廉且便于维护。
附图说明
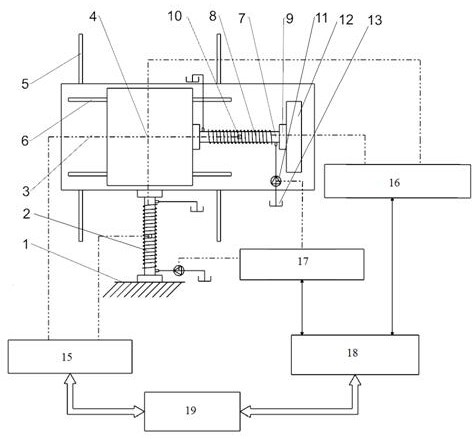
图1为本发明所提出的微动平台装置的结构示意图;
图2为本发明所提出的微动平台装置中热致伸缩轴的剖面结构示意图;
图3为本发明所提出的微动平台装置中热致伸缩轴的伸缩状态示意图。
图中:1-基座,2- Y向热致伸缩轴,3- Y平台,4- X平台,5- Y向导轨,6- X向导轨,7- X向热致伸缩轴,8-电热丝,9-隔热垫,10-温度传感器,11-水泵,12-定位块,13-储液容器,14-流体流道,15-数据采集卡,16-电热丝控制器,17-水泵控制器,18-运动控制卡,19-计算机。
具体实施方式
为了加深对本发明的理解和认识,下面结合附图对本发明作进一步描述和介绍。
如图1-3所示,一种基于材料热胀冷缩原理的二自由度微动平台装置,包括基座1、Y向热致伸缩轴2、Y平台3、X平台4、Y向导轨5、X向导轨6、X向热致伸缩轴7、电热丝8、电热丝控制器16、水泵11、水泵控制器17、运动控制卡18、数据采集卡15、计算机19。
所述基座1与Y向导轨5固定装配在机架上,Y向导轨5位于基座1的上方, Y平台3可滑动装配在Y向导轨5上,基座1设置于Y向导轨5的底部中央位置,以便于装配Y向热致伸缩轴2,Y向热致伸缩轴2的一端固定安装在基座1上,另一端与Y平台3的底部侧壁固定安装。为了避免基座1及Y平台3因受热而缩短使用寿命,在Y向热致伸缩轴2的两端部均套设有隔热垫9,以避免Y向热致伸缩轴2受热时其热量向基座1和Y平台3传递;同时也能够有效精确控制Y向热致伸缩轴2的温度。Y平台3完全由Y向热致伸缩轴2进行重量支撑,因此Y向热致伸缩轴2的承重量须大于等于Y平台3及其上面物品的重量。
所述X向导轨6固定装配在Y平台3上,X平台4可滑动装配在X向导轨6上,X向热致伸缩轴7的一端与X平台4的侧壁固定安装,另一端固定安装在Y平台3上,具体是在Y平台3上设有定位块12,X向热致伸缩轴7的端部固定装配在定位块12上。为了避免定位块12及X平台4因受热而缩短使用寿命,X向热致伸缩轴7的两端部均套设有隔热垫9,利用隔热垫9隔绝X向热致伸缩轴7受热时的热量散发至定位块12及X平台4;并且也能够有效精确控制X向热致伸缩轴7的温度。
所述X向导轨6和Y向导轨5在水平面的投影夹角为90度, X向导轨6和Y向导轨5的数量为2-6个为宜。X向热致伸缩轴7和Y向热致伸缩轴2受热时膨胀,冷却时收缩,X向热致伸缩轴7能够带动X平台4在X向导轨6上左右滑动,Y向热致伸缩轴2能够带动Y平台3在Y向导轨5上升降滑动,从而实现装置的二自由度微动定位功能,且定位精度可达到纳米级。
所述电热丝8均匀缠绕在X向热致伸缩轴7和Y向热致伸缩轴2的外壁上,电热丝8电性连接电热丝控制器16,由电热丝控制器16控制电热丝8发热以实现X向热致伸缩轴7和Y向热致伸缩轴2受热膨胀而产生形变位移的功能。在X向热致伸缩轴7和Y向热致伸缩轴2的中部位置布设温度传感器10,用于实时感测轴温,以实现精确控温。
另外,在所述X向热致伸缩轴7和Y向热致伸缩轴2的内部开设有流体流道14,流体流道14的长度与X向热致伸缩轴7或Y向热致伸缩轴2的长度基本保持一致。在X向热致伸缩轴7和Y向热致伸缩轴2的侧壁上位于流体流道14的两端分别开设进液口和出液口,水泵11安装在进液口处的管道中,由水泵11从储液容器13中泵取冷却液至流体流道14中对热致伸缩轴进行急速降温冷却,冷却液由进液口进入流体流道14中,并从出液口流出流体流道14。水泵11通过导线电性连接水泵控制器17,通过水泵控制器17控制水泵11启停和转速定时定量向X向热致伸缩轴7或Y向热致伸缩轴2内部输送流动的冷却液。
所述温度传感器10电性连接数据采集卡15,电热丝控制器16和水泵控制器17通信连接运动控制卡18,运动控制卡18中设有加热模块和冷却模块,加热模块与电热丝控制器16互联通信,冷却模块与水泵控制器17互联通信,由运动控制卡18实现对X向热致伸缩轴7或Y向热致伸缩轴2的形变收缩控制,以实现二自由度精准定位功能。数据采集卡15和运动控制卡18有线或无线通信连接计算机19。计算机19作为人机交互端,在计算机19中装载有现有的热变形处理程序,用户可根据定位需求在计算机19中设定目标温度,由数据采集卡15将采集的温度实时上报至计算机19中进行处理,然后计算机19发送控制指令至运动控制卡18,由运动控制卡18实现加热/冷却的精确控制。
本发明方案所公开的技术手段不仅限于上述实施方式所公开的技术手段,还包括由以上技术特征任意组合所组成的技术方案。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本发明的保护范围。
- 一种基于材料热胀冷缩原理的二自由度微动平台装置
- 一种基于差动原理的二自由度并联转动平台