一种电力系统稳定器参数优化方法及系统
文献发布时间:2023-06-19 09:41:38
技术领域
本发明属于电力系统技术领域,尤其涉及一种电力系统稳定器参数优化方法及系统。
背景技术
近年来我国经济社会发展迅速,工商业用电量增大,大型发电机组配置增多,而电网结构的优化相对滞后,造成部分区间联络线距离过长、负荷过重,存在较为严重的低频振荡现象。特别地,机组快速励磁系统中响应速度的加快,导致了自动电压调节器高放大倍数的使用,会严重增加机电振荡模态的负阻尼转矩,产生低频振荡,影响系统的动态稳定特性。
针对电力系统低频振荡,现今主要的研究热点为振荡机理分析及抑制措施等方面。在机理分析方面,F.P.deMello和C.Concordia以Heffron-Phillips模型为出发点,运用阻尼转矩分析得出:线路距离过长、线路负荷较重及机组自动电压调节器(AutomaticVoltage Regulation,AVR)的高放大倍数引发的负阻尼转矩是电网发生低频振荡的重要因素;此外,在AVR增设控制器来抵消其提供的负阻尼转矩是一种行之有效的抑制措施。近年来以状态矩阵为基础的模式分析方法在电力仿真中得到了推广。该方法能够定量分析机电振荡模态,有利于主导振荡模式的分析及稳定器的设计。在低频振荡抑制措施方面,电力系统稳定器(Power system stabilizer,PSS)作为励磁系统的阻尼优化环节,在实际应用中得到了广泛的应用。PSS是以机组中的某些电气量(如频率、电功率等)为信号,在AVR增加一个阻尼转矩输出,以此来提高系统动态稳定性。
对于PSS参数整定及优化,主要分为传统的现代控制理论(如相位补偿法和根轨迹法等)和群智能算法。传统控制方法在大系统中状态方程搭建困难且易局部最优,群智能算法以其全局寻优能力得到了较好的应用。目前应用于PSS参数优化的算法主要有粒子群算法,但收敛速度较慢;进化策略算法,但求解精度不高;蝙蝠算法但鲁棒性较差等,并且算法应用环境多为单机无穷大系统或简单和国内外节点较少的典型系统结构,应用于实际系统的较少。
发明内容
本发明的目的在于提供一种电力系统稳定器参数优化方法,能够对实际大电网的产生低频振荡问题的相关机组的PSS参数优化从而优化励磁。
为实现上述目的,本发明提供如下技术方案:
第一方面,提供了一种电力系统稳定器参数优化方法,包括:
确定电力系统振荡运行方式,根据电力系统振荡的运行方式的振荡频率确定造成振荡最严重的电力系统运行方式;
确定振荡机组,在确定造成振荡的电力系统运行方式的基础上进一步确定电力系统中造成振荡的机组;
对振荡机组的励磁控制系统中的电力系统稳定器的参数进行优化。
结合第一方面,进一步的,确定造成振荡的电力系统运行方式具体为:
根据公式(1)求得电力系统的阻尼比
其中α
取阻尼比最小的电力系统振荡运行方式为造成振荡最严重的电力系统运行方式。
结合第一方面,进一步的,所述确定电力系统中造成振荡的机组具体为:
通过小干扰稳定新分析找到与最小阻尼比对应的振荡模式下造成振荡的一组机组,然后通过如下特征条件找出最终需要进行励磁优化的震荡机组:
4)参与因子大于0.1;
5)右特征向量角度与0°或180°相差绝对值在30°以内;
该机组装设了电力系统稳定器。
结合第一方面,进一步的,所述对振荡机组的励磁控制系统中的电力系统稳定器的参数进行优化具体为:
建立需要优化的机组的电力系统稳定器参数的目标函数如下:
max g=max{minξ
其约束如下:
其中,p为机电振荡模态个数,q为运行方式个数,ξ
采用蝴蝶算法对目标函数进行优化。
结合第一方面,进一步的,所述采用蝴蝶算法对目标函数进行优化具体为:
将优化过程表示为如下三元组的最优解:
BOA=(I,P,T) (4)
I为候选蝴蝶集与适应度集间的目标函数,即公式(2)
B为候选蝴蝶集,OB位适应度集;
P为蝴蝶位置的更新函数;
P:B
B
T为判断矩阵函数,负荷结束条件为真,否则为假:
T:B→{true,false} (7)
通过I函数计算各PSS参数下的系统阻尼比,根据P函数更新蝴蝶集位置,直至满足迭代终止条件。
结合第一方面,进一步的,蝴蝶位置更新函数P可以表示为蝴蝶位置和花蜜源位置的函数,如式下式所示:
其中,
式中r1、r2、r3为[0,1]之间随机数,Pswitch为选择概率,当r3≤Pswitch时,进行全局搜索,当r3>Pswitch时,进行局部搜索;f=cI
结合第一方面,进一步的,引入单调递减的惯性权重来更新蝴蝶的自我认知部分,如下式所示:
其中,ω
结合第一方面,进一步的,在蝴蝶算法全局搜索过程中,设常数Pcapture∈[0,1]作为三黑洞系统捕获的概率,对于每只蝴蝶b
若b
式中b
第二方面,一种电力系统稳定器参数优化系统,包括:
运行方式确定模块:用于确定电力系统振荡运行方式,根据电力系统振荡的运行方式的振荡频率确定造成振荡的电力系统运行方式;
震荡机组确定模块:用于确定振荡机组,在确定造成振荡的电力系统运行方式的基础上进一步确定电力系统中造成振荡的机组;
参数优化模块:对振荡机组的励磁控制进行优化。
有益技术效果:本发明基于BPA稳定程序及小干扰程序,运用蝴蝶优化算法对低频振荡主要参与机组的PSS参数进行优化,提高系统动态稳定性,与现有技术相比本发明简化了模型搭建过程,稳定程序时域分析提高了系统判稳时间,小干扰程序方便了低频振荡主要参与机组的提取,适用于大规模电网分析计算。
综合考虑不同运行方式及不同振荡模式的影响进行参数优化,提高了PSS装置阻尼系统低频振荡的鲁棒性;运用蝴蝶优化算法进行参数搜索增加了系统全局寻优能力;并行程序的使用加快了程序计算速度。
附图说明
图1为本发明中SG型PSS模型结构图;
图2为本发明中SI、SI+型PSS模型结构图;
图3为本发明中蝴蝶优化算法的流程图;
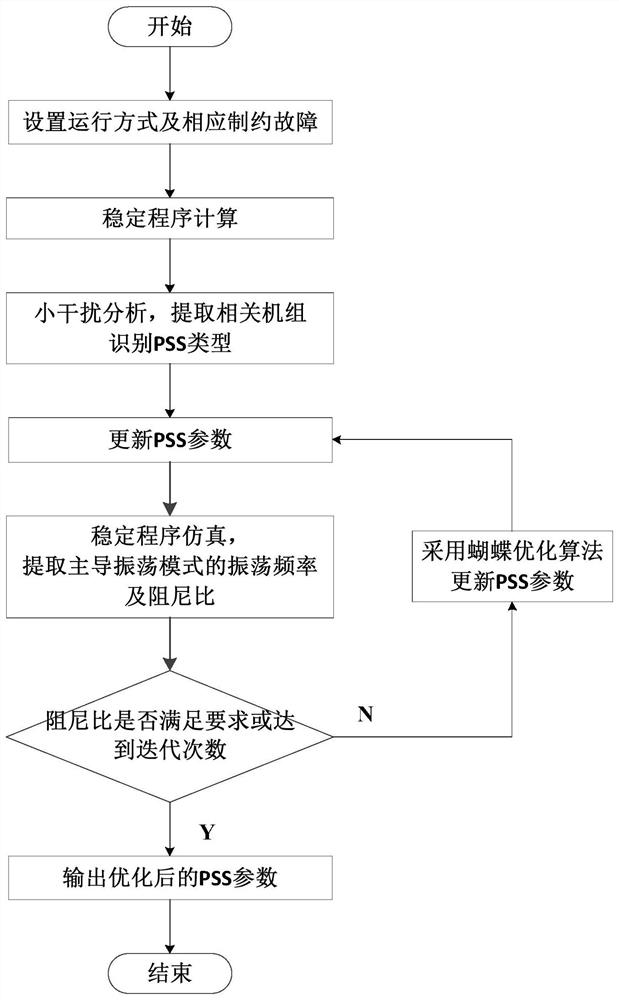
图4为本发明中PSS参数优化的流程图;
图5为本发明实施例中南疆外送方式地理接线图;
图6为本发明中的适应度曲线图;
图7为本发明中PSS参数优化前后新錾高功角曲线图;
图8为本发明中PSS参数优化前后新市北母线电压曲线图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
如图1-8所示:
实施例1,提供了一种电力系统稳定器参数优化方法,包括以下步骤:
步骤一、确定电力系统振荡运行方式,根据电力系统振荡的运行方式的振荡频率确定造成振荡的电力系统运行方式;
以可能引发系统低频振荡的极限运行方式为典型运行方式集合,对各方式进行稳定程序仿真,应用BPA自带的Prony分析可得出系统主导振荡模式的振荡频率与阻尼比。Prony算法是用一系列指数函数的线性组合来贴近电气量等间距采样数据的方法,从而根据相关指数函数即可计算其振荡频率和阻尼比,即可判断系统是否存在动态稳定问题。该算法为时域分析方法,以实测曲线为基础,计算过程简洁明了,适用于确认系统是否存在低频振荡问题及振荡特征的快速计算。
通过Prony分析可得某运行方式下的系统的振荡频率及阻尼比,阻尼比计算公式如式1所示。
其中α
为了保证计算结果的准确性,Prony分析开始时间应躲过故障时刻近区且计算时长不能小于两个低频振荡周期,例如:两种运行方式下的振荡频率分别为0.3445HZ和1.0HZ,则振荡周期分别为2.821s和1s。故障1.1s消失,可取2~10s来计算阻尼比。
假设共存在m个运行方式,第i个运行方式存在n个模式,则第j个模式的振荡频率和阻尼比为f
步骤二、确定振荡机组,在确定造成振荡的电力系统运行方式的基础上进一步确定电力系统中造成振荡的机组;
应用时域分析法的Prony分析虽然计算迅速、简明,但对于电网的全局分析则无法实现。小干扰分析则能够应用电网结构参数及潮流分布构造系统的增广状态矩阵,基于特征值分析法来进行低频振荡的全局分析。它能够通过系统增广状态矩阵计算得出的特征值右特征向量等分析出各模式的机电回路相关比、参与因子、特征值灵敏度等,有利于提取系统主导振荡模式、辨别影响系统低频振荡的主要机组以及表明各控制环节的敏感度等等。
运用小干扰分析时,大电网特征可转换为如下式所示的方程组进行分析:
其中,f
式中,ΔX=[x
其中,A矩阵即为n×n状态矩阵;J
式中,λ
特征值一般成对出现,且不同的振荡频率代表不同的振荡模式,模式与状态变量的关联程度可以用参与因子确定,它是状态矩阵A右特征向量与左特征向量的乘积:
p
p
对系统进行小干扰分析后,根据Prony分析出的主导振荡模式的振荡频率和阻尼比,选择对应的振荡模式及特征向量表。一般情况下,大电网中存在的低频振荡问题主要为局部振荡模式和区间振荡模式。局部振荡模式振荡频率一般在0.7~2.0Hz,为一台机组或一个电厂相对大系统的振荡模式,调整开关机情况可减弱此类模式;区间振荡模式主要分为0.1~0.4Hz的两机群间振荡模式及0.4~0.7Hz间的多机群振荡模式,此类模式影响范围较广,需对其进行详细分析。区间振荡模式中的参与机组特征为:右特征向量角度相差约180°。
为保证计算精度及提高计算速度,通过如下的特点选取主要参与机组:
1)参与因子大于0.1;
2)右特征向量角度与0°或180°相差绝对值在30°以内;
3)该机组装设了PSS装置。
步骤三、对振荡机组的励磁控制励磁控制系统中的电力系统稳定器(PSS)的参数进行优化;
这里的优化是通过对PSS参数优化从而实现对励磁控制系统的优化。
在实际工程应用中,多采用的PSS结构为IEEE Std 421.5-2016中的PSS1A、PSS2A及PSS2B模型。PSS1A对应于BPA中SG型PSS,PSS2B对应SI、SI+型PSS,PSS2A相对PSS2B仅少一个相位补偿环节,可通过设置某个相位补偿环节的补偿相角为零来等效,SG型PSS模型结构如图1所示,SI、SI+型PSS模型结构如图2所示。
以SI、SI+型的转速偏差输入为例,其中,
其中,R为PSS输入信号(转速差、电磁功率差其中的一种或两种);C为PSS输出信号;K
PSS增益的整定规则为:首先K
在考虑PSS相位补偿时,必须要考虑PSS的鲁棒性,不能只考虑一种运行方式和一种振荡模式的阻尼影响,应综合考虑本机振荡频率与系统振荡频率。对于本机振荡频率,快速励磁系统迟后角一般为50°~60°,超前滞后环节提供的超前相角应与迟后角相平衡;为了兼顾系统振荡频率的影响及减小噪音,设置T
按照电力系统稳定要求,为使系统具有较好的动态特性,阻尼比应大于0.03,因此PSS参数优化问题可描述为:
max g=max{minξ
其约束如下:
本领域内的技术人员应明白,本申请的实施例可提供为方法、系统、或计算机程序产品。因此,本申请可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本申请可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、CD-ROM、光学存储器等)上实施的计算机程序产品的形式。
式中,p为机电振荡模态个数,q为运行方式个数,ξ
本发明基于蝴蝶优化算法的PSS参数优化。
Arora等人提出的蝴蝶算法(butterfly optimization algorithm)是一种全新的元启发式智能优化算法,这种算法灵感来源于蝴蝶觅食和求偶行为。蝴蝶获取和分析空气中的气味以确定目标的可能方向。在BOA中,有以下几个假设:1)所有蝴蝶都会散发出某种香味,使蝴蝶可以相互吸引。2)每只蝴蝶都会随机移动,或循着香味朝最优蝴蝶移动,在移动过程中,其适应度会相应变化。3)蝴蝶的刺激强度受目标函数值的影响。4)
全局搜索和局部搜索使用切换概率P来控制,模拟自然界风雨雷电等因素影响,具有重要意义。
现将蝴蝶优化算法应用于PSS参数优化。以待优化PSS参数为蝴蝶个体,假设某个方式下共需优化的机组共m台,即[C
蝴蝶算法优化过程可表示为如下三元组的最优解:
BOA=(I,P,T) (10)
I为候选蝴蝶集与适应度集间的目标函数:
P为蝴蝶位置的更新方式,更新后的蝴蝶集带入矩阵M中:
P:B
T为判断矩阵函数,负荷结束条件为真,否则为假:
T:B→{true,false} (13)
通过I函数计算各PSS参数下的系统阻尼比,根据P函数更新蝴蝶集位置,直至满足迭代终止条件。蝴蝶的位置更新函数P与蝴蝶和花蜜源位置有关,如下式所示:
其中,
式中r
为了提高蝴蝶的主观能动性,引入单调递减的惯性权重来更新蝴蝶的自我认知部分:
其中,ω
为了提高算法的全局搜索能力,引入三黑洞系统捕获微粒机理。在全局搜索过程中,设常数P
若b
式中b
通过优化后PSS参数实现对电力机组励磁的优化控制。
此外,针对BPA程序特点及PSS控制参数整定原则,提出以下几点提高计算精度与计算速度的改进措施:
1)按BPA卡片填写格式习惯,部分参数相应位数可缺省,如0.4358可仅写入.4358,提高计算精度;
2)修改参与因子在0.1以上机组的PSS参数,保证优化过程的合理性与高效性;
3)根据PSS类型及超前滞后环节个数,设置不同的优化过程;
4)采用多线程并行处理,每只蝴蝶调用各自的稳定程序计算适应度值,即进行阻尼比的时域分析。
实施例2,
提供了,一种电力系统稳定器参数优化系统,包括:
运行方式确定模块:用于确定电力系统振荡运行方式,根据电力系统振荡的运行方式的振荡频率确定造成振荡的电力系统运行方式;
振荡机组确定模块:用于确定振荡机组,在确定造成振荡的电力系统运行方式的基础上进一步确定电力系统中造成振荡的机组;
参数优化模块:对振荡机组的励磁控制系统中的电力系统稳定器(PSS)的参数进行优化。
这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
下面以南疆电网某方式下的低频振荡为例,校核本发明的有效性。
(1)确定振荡运行方式
系统基准容量为100MVA。南疆电网外送断面有楚喀-楚莎-楚伽-金色断面、阿楚-坪鹿断面、库阿-库兹断面、和莎-皮叶断面四处,楚喀-楚莎-楚伽-金色断面包括巴楚~喀什单回、巴楚~莎车单回、巴楚~伽师单回、金鹿~色力单回,阿楚-坪鹿断面包括巴楚~阿克苏双回、柯坪~金鹿双回,库阿-库兹断面包含阿克苏~库车双回、库车~龟兹双回,和莎-皮叶断面包含和田~莎车双回、叶城~皮山双回。选取下述方式为典型方式,对系统进行PSS参数优化:南疆电网楚喀-楚莎-楚伽-金色断面外送924.3MW,阿楚-坪鹿断面外送1596.4MW,库阿-库兹断面外送2294.3MW,和莎-皮叶断面外送541.5MW,其余断面输送功率不变,地理接线图如图5所示。对该方式进行稳定计算及prony时域分析后得:制约故障为莎车主变三永N-1,系统存在动态稳定问题,振荡频率为0.5228Hz,阻尼比为-0.006;
由该方式振荡频率可知,为保证3个振荡周期以上的计算时长,设置2~10s为prony计算时长。
(2)振荡机组确定
对系统网架进行线性化处理,形成状态矩阵A,并进行小干扰程序分析。由分析结果得,存在南疆~西北电网的区域间弱阻尼低频振荡模式,南疆机组对西北机组基本反相位。
在振荡频率为0.603Hz的振荡模式下,选取参与因子在0.1以上且右特征向量角度与0°或180°相差绝对值在30°以内的发电机,其中南疆机组10台、甘肃、青海机组7台。但是甘肃兰铝3#机组、金热1#机组共2九台机组未安装PSS装置,共需对15台机组进行PSS参数优化,如表1所示。
表1 低频振荡主要参与机组
(3)基于蝴蝶优化算法的PSS参数优化
在稳定文件中搜索主要参与机组的相关PSS参数位置,读取原参数值,并设定更新参数的范围为:
式中,K
以15台发电机的K
表2 PSS参数优化结果表
迭代过程适应度变化曲线如图6所示,在迭代64次后系统阻尼比大于0.03,PSS参数优化过程完成,且阻尼比提高过程稳定,总体收敛速度较快,具备一定跳出局部最优的能力。
(4)优化结果分析
写入优化后PSS参数,系统振荡频率为0.2382Hz,阻尼比由-0.006增至0.0382。振荡衰减加快,振荡幅值约在11个振荡周期后恢复到稳态水平的10%,动态稳定特性良好,满足电力系统安全稳定要求。
本申请是参照根据本申请实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
- 一种电力系统稳定器参数优化方法及系统
- 一种电力系统稳定器励磁参数优化方法及系统