一种基于深度学习的穿梭车自动寻货定位方法及系统
文献发布时间:2023-06-19 09:47:53
技术领域
本发明涉及智能物流和深度学习计算机视觉技术领域,尤其涉及一种基于深度学习的穿梭车自动寻货定位方法及系统。
背景技术
随着国民经济的飞速发展,自动化立体仓库在各行各业中得到了广泛的应用,已成为现代物流系统的重要组成部分。穿梭车作为立体仓库中的重要组成部分具有输送货物方便和高效的特点。但现有穿梭车存在前期安装调试耗时耗力的缺点,其根本原因在于采用红外传感器进行寻货定位的技术无法适应不同样式的托盘结构。通常需要现场调试人员调节红外传感器的感应距离和角度,而对于采用镂空样式的托盘,红外传感器甚至出现无法准确定位的情况,因此穿梭车亟需一套鲁棒性更强的寻货定位系统。
发明内容
本发明的目的在于提供一种基于深度学习的穿梭车自动寻货定位方法及系统,以解决现有物流行业穿梭车采用红外传感器定位鲁棒性低、耗费人工高的问题。
为实现上述目的,本发明的技术方案如下:
一种基于深度学习的穿梭车自动寻货定位方法,包括如下步骤:
步骤一,收集各类托盘的图像,并标注图像中托盘坐标,制作托盘训练样本集;
步骤二,将托盘训练样本集输入搭建组合的卷积神经网络模型,包括分类网络和目标检测网络,设置超参数后进行训练;
步骤三,保存训练好的分类网络模型和目标检测网络模型的权重;
步骤四,利用分类网络模型和目标检测网络模型对穿梭车采集的图像分类识别并控制穿梭车驱动电机的转速,精准停车寻货。
进一步地,所述分类网络模型采用DenseNet卷积神经网络自动提取图像特征,再使用全连接层或全局池化层输出二分类结果,判定采集的图像中是否含有托盘。
进一步地,所述目标检测网络模型处理分类网络中检测包含托盘的图像,采用卷积神经网络自动提取特征图,并采用Faster RCNN目标检测框架。
一种基于深度学习的穿梭车自动寻货定位系统,包括高清摄像头,图像处理单元和穿梭车驱动电机,所述摄像头和穿梭车驱动电机与图像处理单元相连,所述图像处理单元包括图形处理器和嵌入在图形处理器内的分类网络模型和目标检测网络模型;图形处理器根据输出信号控制穿梭车驱动电机的转速,所述高清摄像头安装在穿梭车上,用于采集图像并传输至图形处理器。
进一步地,所述高清摄像头为两个,高清摄像头斜向上安装在穿梭车的车头和车位。
本发明的基于深度学习的穿梭车自动寻货定位方法及系统,借助图像识别目标检测技术实现穿梭车自动寻货定位,提升穿梭车定位系统鲁棒性,减少了现场调试人员的工作量,确保穿梭车的准确定位。
附图说明
构成说明书一部分的附图描述了本发明的实施例,并且连同描述一起用于解释本发明的原理,参照附图,可以更加清楚地理解本发明:
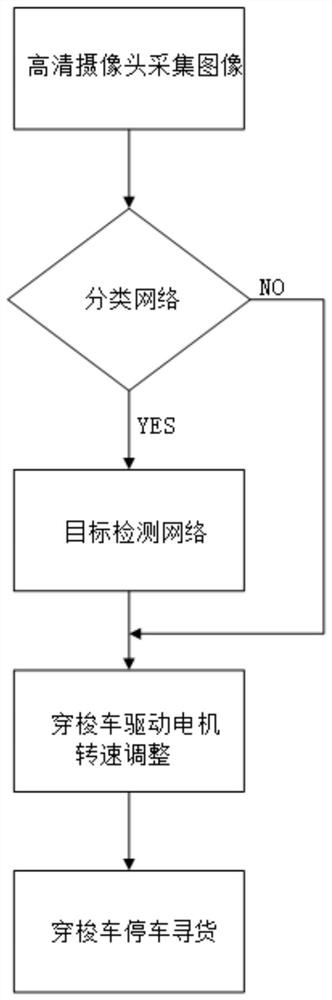
图1是本发明一种基于深度学习的穿梭车自动寻货定位方法的流程图。
具体实施方式
下面结合附图和实施例对本发明的技术方案做进一步的详细说明。
如图1,本发明的一种基于深度学习的穿梭车自动寻货定位方法,包括如下步骤:
步骤一,收集各类托盘的图像,并标注图像中托盘坐标,制作托盘训练样本集;
步骤二,将托盘训练样本集输入搭建的组合卷积神经网络模型,包括分类网络和目标检测网络,设置超参数后进行训练;
步骤三,保存训练好的分类网络模型和目标检测网络模型的权重,并进行量化和剪枝以提高模型推断速度;
步骤四,利用分类网络模型和目标检测网络模型对穿梭车采集的图像分类识别并控制穿梭车驱动电机的转速,精准停车寻货。
其中,分类网络模型采用DenseNet卷积神经网络自动提取图像特征,再使用全连接层或全局池化层输出二分类结果,判定采集的图像中是否含有托盘。目标检测网络模型处理分类网络中检测包含托盘的图像,采用卷积神经网络自动提取特征图,并采用FasterRCNN目标检测框架。
DenseNet是一种具有密集连接的卷积神经网络,该网络通过设置网络中的旁路连接,大幅度的减少了网络的参数量,提高了特征参数的重复利用率。
Faster RCNN目标检测框架包含:卷积层用于提取特征图、RPN(Region ProposalNetwork)用于生成区域候选框,Roi Pooling(Region of Interests Pooling)用于得到大小统一的特征图,分类层用于将识别目标进行分类。
一种基于深度学习的穿梭车自动寻货定位系统,包括高清摄像头,图像处理单元和穿梭车驱动电机,摄像头和穿梭车驱动电机与图像处理单元相连,图像处理单元包括图形处理器和嵌入在图形处理器内的分类网络模型和目标检测网络模型;图形处理器可同时接入多路高清摄像头,穿梭车驱动电机根据图形处理器的运算结果控制转速,高清摄像头安装在穿梭车上,用于采集图像并传输至图形处理器。
本实施例中,高清摄像头为两个,高清摄像头斜向上安装在穿梭车的车头和车位。同时,每个高清摄像头配有辅助照明灯,确保在环境光线恶劣的情况下,采集到清晰的图像。
穿梭车驱动电机根据图形处理器的运算结果控制驱动电机转速,确保穿梭车精准的寻货定位。当分类网络检测到托盘出现时,穿梭车驱动电机控制穿梭车减速,当目标检测网络识别出托盘边界时,控制穿梭车精准停车。
以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应含在本发明的保护范围之内。
- 一种基于深度学习的穿梭车自动寻货定位方法及系统
- 用于智能仓储的自动寻货系统及其方法