地图生成系统以及移动体
文献发布时间:2023-06-19 09:49:27
技术领域
本发明涉及一种地图生成系统以及移动体。
背景技术
以往,作为用于能够自律走行的移动体进行自律走行的技术采用称作SLAM(Simultaneous Localization and Mapping:同步定位与地图构建)的自我位置推定和环境地图作成的技术。作为环境地图有时使用基于移动体的移动范围内物体的有无作成的占用栅格地图(例如参照专利文献1)。该占用栅格地图将移动范围的平面和/或空间分割为多个区划(单区)进行存储,并对分割的各区划给予对应于物体的有无的单区值。另外,在占用栅格地图中,对每个区划基于多个扫描算出存在物体的概率(以下有时称作存在概率或占用概率),基于该概率管理各区划的单区值。
在先技术文献
专利文献
专利文献1:日本专利申请(特开)JP2017-157087
发明内容
发明要解决的课题
占用栅格地图的作成(及更新)根据每规定时间和/或每规定扫描次数执行,其扫描数越多则信息量越增加而能够提高地图的精度,但伴随扫描数据(以下有时称作检测信息)的增大,对存储器造成压力并且运算处理的负荷也增加。另外,对一个区划根据多个扫描算出存在概率及单区值的情况下,会发生前后执行的扫描之间信息重复,由后面的扫描覆盖单区值。因此也考虑从旧的扫描数据开始顺次进行删除,仅使用新的扫描数据算出单区值的方法,但这样的话,存在包含有效的信息的旧的扫描数据也被删除的可能性,导致地图的精度下降。
本发明的目的是提供能够确保占用栅格地图的地图精度的同时减轻存储器容量和运算处理的负荷的地图生成系统以及移动体。
用于解决课题的手段
本发明的地图生成系统,通过检测单元检测距移动体的移动范围中的周围物体的距离和方向,基于物体的有无生成占用栅格地图,其特征在于,该地图生成系统具备:将所述检测单元检测的每检测单位的检测值作为检测信息按时间序列存储的存储单元;基于存储于所述存储单元的检测信息作成占用栅格地图并存储于所述存储单元的地图作成单元;以及关于每个存储于所述存储单元的检测信息算出对所述占用栅格地图的影响度的影响度算出单元,其中所述地图作成单元基于由所述影响度算出单元算出的影响度选择检测信息作成占用栅格地图。
根据这样的本发明,地图作成单元基于由影响度算出单元算出的影响度选择检测信息作成占用栅格地图,所以能够高效率地作成或更新占用栅格地图。即,地图作成单元以不使用对占用栅格地图的影响度小的检测信息的方式进行选择,从而能够减少利用于运算的检测信息的数量,小的存储器容量即可,并且能够使运算处理的负荷减轻。另一方面,选择使用对占用栅格地图的影响度大的检测信息,从而即使旧的检测信息也保留有效的,能够确保作成的占用栅格地图的地图精度。
本发明中优选,还具备将存储于所述存储单元的检测信息按每个占用栅格地图的区划进行计数作为观测频数算出的观测频数算出单元,所述影响度算出单元基于由所述观测频数算出单元算出的观测频数决定每检测信息的各区划的有效或无效,并且以对应于有效的区划的比率进行提高影响度的方式算出影响度。
根据这样的构成,观测频数算出单元将存储于存储单元的检测信息按每个占用栅格地图的区划进行计数作为观测频数算出,对应于基于该观测频数定为有效的区划的比率提高检测信息的影响度,从而能够高效率地选择检测信息。即,对某区划从旧的到新的存在多个检测信息(检测值)的情况下,将其个数(检测的次数)作为观测频数记录,将从新的开始规定数定为有效,比其旧的定为无效。而且,较高评价存在大量有效的区划的检测信息的影响度。由此一来,对于观测频数高(检测的次数多)的区划,容易反映环境变化的新的检测信息的影响度变高,能够提高占用栅格地图的地图精度。另一方面,对于观测频数低(检测的次数少)的区划,比较旧的检测信息也得以较高评价影响度,能够将包含旧但有效的信息的检测信息很好保留地作成占用栅格地图。
本发明中优选,所述地图作成单元对由所述观测频数算出单元算出的观测频数比规定的阈值小的区划更新区划值而作成占用栅格地图。
根据这样的构成,地图作成单元对观测频数比规定的阈值小的区划更新区划值而作成占用栅格地图,所以得以选择相对新的检测信息,作成反映了环境变化的占用栅格地图。
本发明中优选,所述地图作成单元不管由所述观测频数算出单元算出的观测频数如何,更新对各区划的区划值而作成占用栅格地图。
根据这样的构成,地图作成单元不管观测频数如何,更新对各区划的区划值而作成占用栅格地图,所以能够使占用栅格地图的稳定性提高。
本发明中优选,所述地图作成单元将由所述影响度算出单元算出的影响度比规定的阈值小的检测信息从所述存储单元删去。
根据这样的构成,地图作成单元将影响度比规定的阈值小的检测信息从存储单元删去,从而能够削减占用栅格地图的作成所耗的运算负荷和时间,并且能够节约存储单元的容量。
本发明中优选,所述地图作成单元将检测信息从所述存储单元删去之前,使用存储于所述存储单元的全部检测信息作成占用栅格地图。
根据这样的构成,地图作成单元将检测信息从存储单元删去之前使用存储于存储单元的全部检测信息作成占用栅格地图,所以能够使占用栅格地图的稳定性提高。
本发明中优选,还具备将存储于所述存储单元的全部检测信息的影响度的合计与属于规定的数量的检测信息的集合的检测信息的影响度的合计之比作为覆盖率算出的覆盖率算出单元,所述地图作成单元基于由所述覆盖率算出单元算出的覆盖率设定所述影响度的阈值。
根据这样的构成,地图作成单元基于由覆盖率算出单元算出的覆盖率设定影响度的阈值,所以能够高效率地选择检测信息而作成占用栅格地图。另外,基于覆盖率自动设定影响度的阈值,所以能够将运算处理效率化。
本发明的移动体是具备移动单元、检测单元以及控制单元的移动体,其特征在于,所述任意的地图生成系统由所述控制单元构成。
根据这样的本发明,移动体具备移动单元、检测单元以及控制单元,由控制单元构成所述地图生成系统,从而能够与前述构成同样地高效率地作成或更新占用栅格地图,自律走行的移动体中能够确保占用栅格地图的地图精度的同时使存储器容量和运算处理的负荷减轻。
附图说明
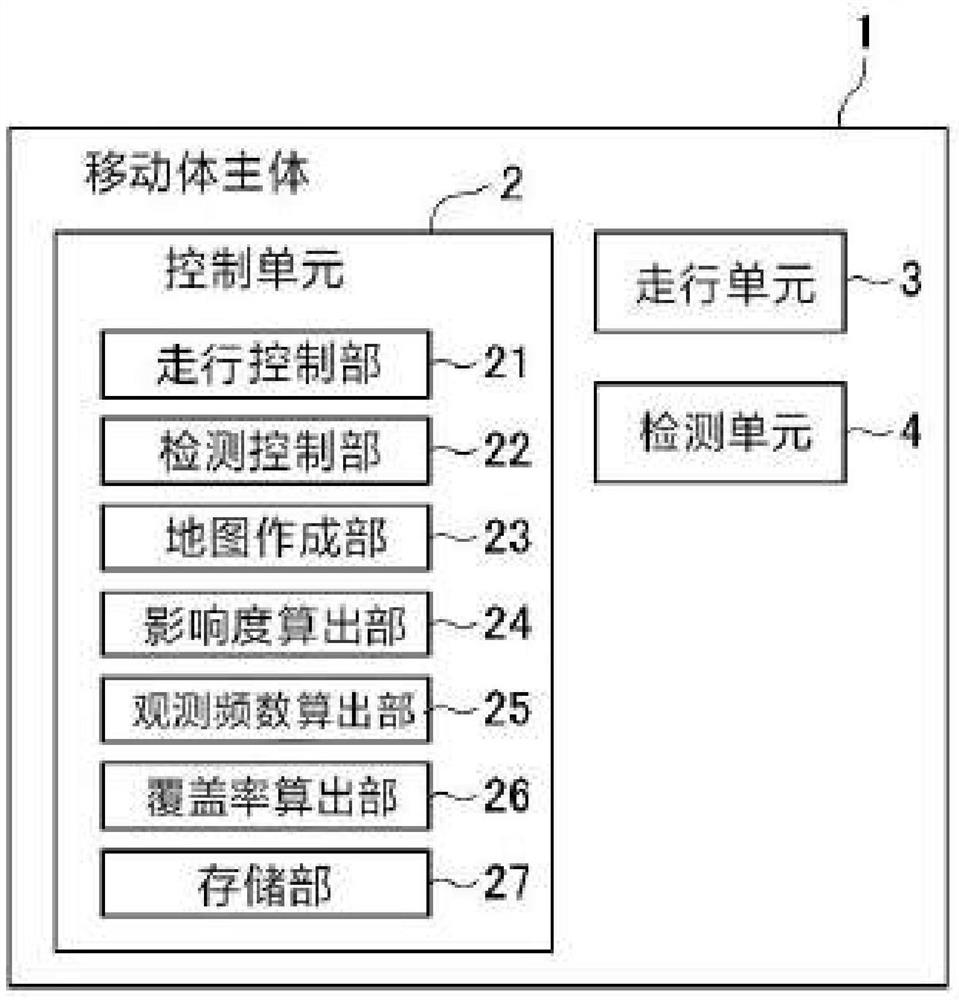
图1是本发明的一实施方式所涉及的移动体的框图。
图2是表示所述移动体的移动范围的占用栅格地图的直接值的概念图。
图3(A)~(C)是表示所述占用栅格地图的作成经过的概念图。
图4是表示所述移动体的动作的流程图。
图5是表示所述占用栅格地图的作成方法的流程图。
图6是表示与图5不同的所述占用栅格地图的作成方法的流程图。
图7(A)、(B)是表示所述占用栅格地图的作成例的图。
图8是表示所述作成例中扫描数的削减率的曲线图。
图9(A)、(B)是表示所述作成例中占用栅格地图的品质的图。
图10(A)~(C)是表示所述作成例中输入扫描数与削减后的扫描数、节点数、弧线数的关系的曲线图。
图11是表示所述移动体的动作的变形例的流程图。
具体实施方式
以下,根据图1~图9说明本发明的一实施方式。
如图1所示,本实施方式的移动体具备移动体主体1、驱动控制移动体主体1的控制单元2、作为使移动体主体1移动的移动单元的走行单元3和用于检测移动体主体1的周围物体的检测单元4。该移动体通过SLAM技术进行自我位置推定和环境地图作成,基于存储于控制单元2的每对象空间(移动范围)的地图和走行计划(schedule),移动体主体1通过走行单元3自律走行。作为该地图利用后述的占用栅格地图。
移动体主体1具备未图示的机身以及底盘,走行单元3具有例如左右一对车轮和分别独立旋转驱动一对车轮的马达。
检测单元4例如具备:设于移动体主体1的前部的前方传感器、设于移动体主体1的上部的环境传感器和设于移动体主体1的后部的后方传感器。环境传感器是将红外线激光等的激光向周围照射,测量距物体的距离的激光扫描仪(LIDAR(Light Detection andRanging:激光探测与测量;或Laser Imaging Detection and Ranging:激光成像探测与测量))。该环境传感器以通过SLAM技术取得的自我位置即传感器中心和方位作为基准位置(x,y,θ)
控制单元2具备CPU(Central Processing Unit:中央处理器)等运算单元和ROM(Read-Only Memory:只读存储器)、RAM(Random Access Memory:随机读取存储器)等存储单元而控制移动体主体1的动作,其具备控制走行单元3的走行控制部21和控制检测单元4的检测控制部22。进而,控制单元2具备如后述的占用栅格地图的作成所涉及的地图作成部(地图作成单元)23、影响度算出部(影响度算出单元)24、观测频数算出部(观测频数算出单元)25以及覆盖率算出部(覆盖率算出单元)26、和存储作成的占用栅格地图和各种数据的存储部(存储单元)27而构成。
作为地图作成部23作成占用栅格地图的时机(timing)例如是,新生成新的对象空间的占用栅格地图的地图生成模式的情况、对已经生成占用栅格地图的既知的对象空间更新地图的地图更新模式的情况、对既知的对象空间实施通常的作业的自律走行模式的情况等。另外,作为由地图更新模式更新地图的期间(更新时间段),可以基于移动体主体1在其对象空间走行的累计走行时间(例如每数小时至数十小时),也可以基于检测单元4在其对象空间执行检测的累计扫描次数(例如每数千至数万次),也可以基于使用者设定输入的期间活手动下达的指令。
接着,参照图2、图3说明占用栅格地图的作成所涉及的基本的概念。图2是表示移动体的移动范围的占用栅格地图M的直接值的概念图,图3是表示占用栅格地图M的作成经过的概念图。占用栅格地图M将对象空间规定为二维平面,将该平面分割为规定尺寸(例如5平方厘米)的栅格,对每个分割的区划即单区C设定单区值(区划值)。作为该占用栅格地图M的作成方法,例如光线投射法(ray casting)是标准的,以下说明使用光线投射法的占用栅格地图M的作成步骤。
在光线投射法中,从传感器中心伸出模拟激光束的直线,更新光束通过的单区C的值。如图3所示,若激光扫描仪(环境传感器)的测量范围为圆内,则处于光束照到物体的位置的单区C为占用(例如单区值=1),光束通过的单区C为自由(例如单区值=-1)。测量范围内没有物体的情况下光束不返回,所以为未观测,通常不改变单区值。占用栅格地图M的单区值借助对数优势管理,加算多个扫描的单区值计算对数优势。例如某单区C的占用为3次、自由为2次,则对数优势为3+(-2)=1。根据该对数优势计算占用概率。其中,图3中为了简便,简单地将单区值涂盖。
接着,使用图2、图3说明本发明的占用栅格地图M的作成方法的方案。图2是占用栅格地图M的直接值,实际环境中设存在墙壁W和物体O。图3(A)是控制单元2通过检测单元4取得第1次扫描(360°扫描)时的占用栅格地图M的单区值。在此,第1次扫描的自由单区C
参照图3,第1次扫描写入的单区值的大部分由其后面的扫描涂盖。第1次扫描的占用单区C
本发明的占用栅格地图M的作成方法根据各扫描有助于占用栅格地图M的生成的单区数计算其扫描的影响度,削减影响度小的扫描。根据图2、图3可知,扫描的影响度与时间的推移一起变化,一般地越是旧的扫描则影响度越小。然而,即使时间上早,但该区域若未取得新的扫描,则旧的扫描仍存在。这样,本发明的作成方法具备保留相对新的扫描的性质,所以构成削减扫描数据的同时也容易进行占用栅格地图M的更新的方法。
另外,占用栅格地图M的作成中,一般对各单区C给予对数优势而计算占用概率。但仅凭对数优势,其单区C扫描了多少次的信息没有保留。例如某单区C的对数优势为-3,可以是光束3次通过单区C,自由值(-1)被加算3次,或者可以是光束6次通过、3次到达单区C,自由值(-1)被加算6次,占用值(1)被加算3次,仅凭对数优势,光束的通过次数(扫描次数)没有区别。
作成占用栅格地图M时,为实现存在干扰或误差也得到稳定的结果,优选通过多次的扫描,大量的光束通往各单区C,进行统计上处理。但不是说扫描越多越好,也多有旧的扫描由新的扫描涂换而变为不必要的情况。例如物体的位置变化后,移动起始的单区C变为自由状态,移动目标的单区C变为占用状态,若移动后的位置确定,则旧的扫描变为不必要。根据这些,若明示地管理次数,以适当数的扫描计算单区值,则使得无用的计算减少。
本发明的占用栅格地图M的作成方法中,为了以适当数量的扫描来计算单区值而导入观测频数。特征在于:各单区C具有观测频数,将扫描其单区C的次数记录为观测频数,基于记录的观测频数仅保留最新N个扫描,舍弃旧的扫描。在此,N为对于根据对数优势计算占用概率所充分的观测数即可,经验上考虑可以是1~2秒量的扫描。例如,环境传感器的帧速率为10fps,则可知N为10~20就能够作成充分实用的占用栅格地图M。
另外,占用栅格地图M需要反映环境的变化随时更新,作为其更新频度可考虑以实际时间更新的情况和每日定期更新的情况等各种方式。另外,要减小地图形状的歪曲而保持一贯性,需要进行循环闭包。在此,循环是指移动体在相同场所通过的环绕路径,对循环进行检测而消除地图的歪曲的处理称作循环闭包。而且,移动体一遍又一遍地在相同场所通过,所以循环闭包频发。进行循环闭包后重新制作地图,但由于为此以往一般使用全部过去的数据,所以作为长期间持续更新地图时的问题存在处理时间和存储器使用量的增加。
本发明的占用栅格地图M的作成方法中,结合如前述的扫描数据的削减,缩略循环闭包中使用的作为内部数据的姿势曲线图。通过缩略姿势曲线图,循环闭包和其后的地图再构筑所要的处理时间和存储器使用量得以削减。
具体地,检测移动体的走行轨迹的循环,通过姿势调整进行循环闭包。姿势调整是使用表示移动体的位置的约束关系的姿势曲线图进行的技术,姿势曲线图由表示移动体的位置的节点和表示节点间的相对位置的弧线构成,能够表示移动体的推定位置和测量值的偏差。姿势调整将该偏差最小化,从而修正地图的歪曲。姿势调整的处理时间大致正比于姿势曲线图的节点数,也依赖于循环数。SLAM技术中,移动体的位置于每个扫描中推定,移动体的位置及节点的个数正比于扫描数。另外,考虑到环境是小规模的话会一遍遍地通过相同场所,所以想必走行轨迹变长后,循环数也增加。因此,扫描数若增加则姿势调整的处理时间也增加,所以如前所述,削减使用的扫描数,从而能够减小伴随循环闭包处理的姿势曲线图的尺寸,缩短姿势调整的处理时间,也能够削减存储器使用量。
接着,同时参照图4~图6详细说明移动体的动作以及占用栅格地图M的作成(更新)方法。图4是表示移动体的动作的流程图。图5是表示占用栅格地图M的作成方法的流程图,图6是表示不同于图5的占用栅格地图M的作成方法的流程图。此外,在此省略说明移动体的走行所涉及的动作,着重说明伴随走行而作成、更新占用栅格地图M的方法。
通过控制单元2的走行控制部21开始移动体主体1的走行后,由检测控制部22驱动控制环境传感器,开始周围物体的检测(检测信息取得工序:步骤ST1)。控制单元2通过SLAM技术推定自我位置的同时与自我位置相关地将由环境传感器检测的检测值作为检测信息存储于存储部27(检测信息存储工序:步骤ST2)。检测信息的检测以环境传感器的1个周期量的检测值为1个扫描,将该1个扫描作为一个检测信息存储于存储部27。接着,控制单元2基于存储于存储部27的检测信息,使地图作成部23作成占用栅格地图M(地图作成工序:步骤ST3),使作成的占用栅格地图M存储于存储部27。接着,控制单元2判断是否削减检测信息(削减判断工序:步骤ST4)。在此,判断检测次数(扫描次数)是否到达规定次数,若达到规定次数(则步骤ST4中为“是”),进入下一步骤ST5,若未到达规定次数(步骤ST3中为“否”),再次返回检测信息取得工序(步骤ST1),取得新的检测信息。
削减判断工序(步骤ST4)中判断削减检测信息的情况下,控制单元2的影响度算出部24对存储于存储部27的每个检测信息算出对占用栅格地图M的影响度(影响度算出工序:步骤ST5)。接着,控制单元2的地图作成部23基于由影响度算出部24算出的影响度选择检测信息从存储部27削减检测信息(检测信息削减工序:步骤ST6)。该影响度算出工序(步骤ST5)和检测信息削减工序(步骤ST6)中的运算顺序将后述。接着,控制单元2的地图作成部23基于削减的检测信息再度作成(更新)占用栅格地图M(地图再作成工序:步骤ST7),使更新的占用栅格地图M存储于存储部27。
如以上这样地作成和更新占用栅格地图M后,控制单元2判断在步骤ST8是否继续移动体主体1的走行。步骤ST8中继续走行的情况下,再次返回检测信息取得工序(步骤ST1),走行控制部21基于新作成的占用栅格地图M控制移动体主体1的走行并且检测控制部22继续由环境传感器对周围物体检测,控制单元2反复进行上述各工序。步骤ST8中不继续走行的情况下,控制单元2使移动体主体1的走行停止并使各部分的动作停止。
接着,在影响度算出工序(步骤ST5)算出的影响度是影响度算出部24是对占用栅格地图M的每个扫描(检测信息)算出的,使用如前所述观测频数算出部25算出的观测频数。在此,对于某扫描s
扫描的影响度e
e
在此,A是用于对有效占用单区数o
影响度e
首先,在步骤ST10中关于全单区初始化对数优势v
自由单区C
占用单区C
在步骤ST22中,判断对含于某扫描s
以上的处理意味如是。是否因扫描s
作为以上处理的优点,能够在光线投射法的过程中计算影响度,所以计算成本能够减小并且能够保留旧但观测少的区域的扫描s
此外,影响度算出工序(步骤ST5)不限于以上的处理顺序,也可以以图6所示的顺序执行。图6所示的处理顺序中步骤ST14~ST17和步骤ST18~ST21与图5不同。具体地,先于步骤ST14执行步骤ST16,先于步骤ST19执行步骤ST20。即,与观测频数b
通过以上的影响度算出工序(步骤ST5),对每个扫描(检测信息)算出影响度e
基于算出的影响度e
数式1:
该覆盖率越大,则基于扫描集合S的占用栅格地图M越接近基于全扫描集合S
首先,求取全扫描的影响度的合计total E之后,将全扫描按影响度e
sum=sum+e
sum/total E<coverage…(4)
地图再作成工序(步骤ST7)中,地图作成部23对由以上的各顺序选择保留的扫描s
以下,参照图7~图10说明作成占用栅格地图M的例子。图7是表示占用栅格地图的作成例的图。图8是表示作成例中的扫描数的削减率的曲线图,表示基于覆盖率的设定的扫描数的削减率。图9是表示作成例中的占用栅格地图的品质的图。图10(A)~(C)是表示作成例中的输入扫描数与削减后的扫描数、节点数、弧线数的关系的曲线图。
图7(A)中表示作为以往例不削减扫描而作成的占用栅格地图M,图7(B)表示本发明的依据前述作成方法削减扫描之后作成的占用栅格地图M。本发明的作成方法中覆盖率采用0.95。图7中占用栅格地图M之上显示对应于地图生成所使用的扫描的移动体的移动轨迹。如图7(A)所示,移动体按A、B、....F的顺序走行。图7(B)中扫描是被削减的,所以移动体的位置也呈断片状。此外,在此为了容易观看,取单纯的短路径,削减率不高。
如图7(B)所示,可知由本发明的作成方法删除了旧的扫描。例如区间A-B的前半部是被删除的。这是因为虽然该部分取得的扫描组主要决定房间的上部的单区的占用概率,但被在后走行的区间E-F的后半部替换了单区值,区间A-B的影响度减小了。另外,区间C-D也是被删除的,这是因为被区间D-E的保留部分替换。此外,图7(B)中在区间C-D的右上方存在单区值未定的区域,但这是因覆盖率为0.95所导致的缺落。
另外,图7(A)中对于墙壁的占用单区(黑色)无缺落地现出,图7(B)中有空缺的部分。这可以认为是由于扫描的歪曲或误差,仅最近少数的扫描就使单区值变得不稳定。这一点在单区值计算中使用大量的扫描就可以解决。即,观测频数b
图8、图9中表示通过覆盖率的设定使扫描数的削减率及占用栅格地图M的品质如何发生变化。图8的曲线图表示对于扫描数为3000个、6000个、9000个的情况的覆盖率的削减率。图9(A)、(B)分别表示覆盖率为0.6及0.9的情况下作成的占用栅格地图M。在此,将削减率(reduction ratio)由削减后的扫描数除以削减前的扫描数所得的值来定义。该定义中削减后的扫描越少则削减率越小。
如图8所示,越提高覆盖率(coverage)则削减率越大。另外,扫描数越多则削减率越小。这是因为扫描数越多,重复测量的面积越增多。另外,关于对象空间的面积,如果是相同扫描数,面积越小则测量的重复度越大。即,变成一遍遍地测量相同场所,扫描的削减率变小。
如图9所示,生成的占用栅格地图M的品质根据覆盖率而变化。这是占用栅格地图M在覆盖率为0.6的情况与0.9的情况的比较例。图9(A)所示的覆盖率为0.6的情况下有空缺部分N(图中灰色表示的部分),而若图9(B)所示的覆盖率为0.9的情况下,则空缺部分几乎被埋没。此外,根据对象空间的广度或长度等不同,有时即使覆盖率为0.9也可见空缺区域。其要因考虑是:扫描的重复少、存在很多影响度大的扫描;在长走廊等处激光扫描仪的最大测量距离不足。在长走廊的长度方向上变为无法测量而使区域成为未观测,走廊的中间部分的扫描的有效单区数减少、影响度变小。预想这样的要因重复,使欠落部分保留。由此,虽然提高覆盖率则欠落部分消除,但削减率会变低,因此对应于对象空间和环境来适宜地设定覆盖率才是有效的。
图10(A)中表示作成例中的输入扫描数和削减后的扫描数的关系,图10(B)表示输入扫描数和削减后的节点数的关系,图10(C)表示输入扫描数和削减后的弧线数的关系。此外,图10(B)、(C)表示用于前述的循环闭包的姿势曲线图缩略后的结果、节点数及弧线数被削减的状态。SLAM技术中由于是对各扫描求取移动体位置,所以节点和扫描是一一对应的。但姿势调整通过关键帧进行的情况下,以关键帧单位抽取移动体位置作为节点。在此,以关键帧单位生成节点。在此,关键帧是指以一定间隔跳过的扫描,每当平移距离和旋转角超过阈值(例如分别是0.4m和60°)则抽取移动体位置。另外,对应于节点的关键帧间的扫描组中,影响度e
如图10(A)所示可知,虽然输入扫描数增加,削减后的扫描数不会那么增加,而保持恒定或微增。这是因为随着走行而扫描数增加的同时重复部分也增加。图10(B)的虚线是姿势曲线图的仅进行了关键帧跳过的情况的节点数,若仅是关键帧跳过,则节点数正比于扫描数而增加。另一方面,通过进行本发明的处理,如实线所示可知,节点数进一步被削减,并且相对于扫描数的增加率也被抑制。图10(C)的虚线是仅进行了关键帧跳过的情况的弧线数,弧线也与节点有同样的倾向,但弧线也影响循环的个数,所以增减的变动比节点复杂。
根据这样的本实施方式,能够起到以下的作用和效果。
(1)移动体具备走行单元3、检测单元4以及控制单元2,通过控制单元2的地图作成部23生成、更新占用栅格地图M,从而能够确保占用栅格地图M的地图精度的同时使存储器容量和运算处理的负荷减轻。
(2)控制单元2的地图作成部23基于由影响度算出部24算出的影响度e
(3)观测频数算出部25将存储于存储部27的扫描s
(4)地图作成部23将影响度e
(5)地图作成部23基于由覆盖率算出部26算出的覆盖率,设定影响度e
(6)根据图6所示的处理顺序,在单区值的更新中也使用超过b
〔实施方式的变形〕
此外,本发明不限于上述实施方式,能够达成本发明的目的的范围内的变形、改良等包含于本发明。
上述实施方式中作为移动体没有例示具体的方案,作为移动体例如是服务机器人、家用机器人等移动机器人,更具体地能够例示扫除机器人、警备机器人、搬运机器人、向导机器人等。另外,作为移动体也可以是自动运转汽车或作业车等。另外,移动体的移动范围不限于二维平面空间,也可以是三维空间,这种情况下移动体可以是无人机等飞行器。即,上述实施方式中,作为SLAM技术示出了使用2D-SLAM的例子,但本发明的地图生成系统也能够应用于以三维空间为对象的3D-SLAM。
上述实施方式中,移动体的移动体主体1具备控制单元2,该控制单元2中设置有地图作成部23和存储部27,但作成占用栅格地图M的地图作成单元和存储占用栅格地图M的存储单元等也可以不设于移动体主体1,而设于能够与移动体主体通信的其他机器,构成为移动体主体1基于由其他机器作成的占用栅格地图M自律走行。另外,作为移动体也可以不具备移动单元(走行单元),可以是使用者手动使设置有检测单元的推车等移动的同时对周围进行检测的构成。
上述实施方式的占用栅格地图M的作成方法中,如图4所示,在检测信息削减工序(步骤ST6)选择检测信息从存储部27削减之后,基于削减的检测信息在地图再作成工序(步骤ST7)更新占用栅格地图M,但不限于这样的处理顺序,也可以采用图11所示的处理顺序。图11是表示移动体的动作的变形例的流程图。图11所示的顺序中,在检测信息削减工序(步骤ST6)之前先执行地图再作成工序(步骤ST7),基于被削减前的检测信息更新占用栅格地图M,将其后被选择的检测信息从存储部27削减。根据该顺序,地图作成部23将检测信息从存储部27删除之前使用存储于存储部27的全部的检测信息作成占用栅格地图M,所以能够使占用栅格地图M的稳定性提高。
产业上的可利用性
如以上所示,本发明能够很好地利用于使用占用栅格地图自律移动的机器人等各种移动体中占用栅格地图的作成等所需的存储器容量较小即可并且使运算处理的负荷减轻,从而能够实现占用栅格地图的作成的效率化的地图生成系统。
附图标记说明
1 移动体主体
2 控制单元
3 走行单元(移动单元)
4 检测单元
23 地图作成部(地图作成单元)
24 影响度算出部(影响度算出单元)
25 观测频数算出部(观测频数算出单元)
26 覆盖率算出部(覆盖率算出单元)
27 存储部(存储单元)
C 单区(区划)
M 占用栅格地图
S 扫描(检测信息)
- 地图生成系统以及移动体
- 地图数据生成装置、车载设备、地图数据生成系统、地图数据生成程序、地图数据利用程序以及存储介质