一种直线式离心二封机
文献发布时间:2023-06-19 11:21:00
技术领域
本发明涉及锂电池加工技术领域,具体为一种直线式离心二封机。
背景技术
真空封装是锂离子电芯生产制造的主要工艺之一,该工艺具体需要进行气袋刺破、抽真空、电芯整形、封装、残液收集等工序,并且这些工序主要都需要在一个密闭的真空腔内完成,目前行业内通过转盘离心二封机对锂电池进行封口封印。
然而现有技术中的转盘离心二封机运行模式存在以下缺点:
1、转盘式由凸轮分割器带动离心腔体运转,切换工位,非常笨重;
2、维护困难,离心腔体集中于一个大转盘上,对离心腔体维护操作很麻烦,空间太小,离心腔体均通过大转盘中间滑环控制,线路复杂,后期更换滑环,更改线路等更是难上加难;
3、成本高,转盘式模式会用到大型分割器、超大转盘、大型滑环,这些都是造价昂贵,使设备成本超高;
4、控制不稳定,容易出现问题,且都不好排查,离心腔体的封装机构是通过腔体内部高速滑环控制传输,离心腔体内部滑环还需通过大转盘中间滑环进行控制传输,线路传输复杂,容易传输出错。
发明内容
本发明的目的在于提供一种直线式离心二封机,以解决上述背景技术中提出的现有技术中的转盘离心二封机具有切换工位较为笨重、线路复杂难以更换、内部腔体维护困难和设备成本较高的问题。
为实现上述目的,本发明提供如下技术方案:一种直线式离心二封机,包括机架,所述机架顶部的中心固定设置有二号上料拉带和一号下料拉带,所述二号上料拉带顶部的一端固定设置有一号上料拉带,所述一号下料拉带顶部的一端固定设置有二号下料拉带,所述机架顶部的一侧从左到右依次固定设置有A号离心腔体、B号离心腔体、C号离心腔体和D号离心腔体,所述A号离心腔体与B号离心腔体之间固定设置有第一切边机构,所述C号离心腔体与D号离心腔体之间均固定设置有第二切边机构。
作为本发明的一种优选技术方案,所述机架顶部的另一侧从左到右依次设有第一CCD拍照机、第一上料机器人、第二CCD拍照机和第二上料机器人,所述第一CCD拍照机与一号上料拉带对应设置,所述第二CCD拍照机与二号上料拉带对应设置。
作为本发明的一种优选技术方案,所述机架顶部位于第一切边机构的一侧设有第一腔体出料机械手,所述机架顶部位于第二切边机构的一侧设有第二腔体出料机械手。
作为本发明的一种优选技术方案,所述一号下料拉带顶部的一端和二号下料拉带顶部的一端分别设有第一转移机械手和第二转移机械手。
作为本发明的一种优选技术方案,所述一号上料拉带的一端和二号上料拉带的一端均设置有光源,两个所述光源分别与第一CCD拍照机和第二CCD拍照机对应设置。
与现有技术相比,本发明的有益效果是:
1.直线式布局,ABCD个独立离心腔体直线排布,设计空间科学合理,维护空间大,离心腔体靠近设备边沿,维护时操作方便;
2.ABCD个离心腔体上料精准,离心腔体由第一上料机器人、第二上料机器人、第一CCD拍照机和第二CCD拍照机配合上料,定位精准;
3.产能高,各个腔体独立工作,互不影响,整段产能可达20ppm,超行业设备;
4.成本更低,A号离心腔体和B号离心腔体之间共用第一腔体出料机械手和第一切边机构,C号离心腔体和D号离心腔体之间共用第二腔体出料机械手和第二切边机构,且互不干扰,可大大节约空间、成本;
5.污染小,电池离心封装后,直接从ABCD个离心腔体下料到第一切边机构和第二切边机构进行切掉气袋,这样后续的电池转移就不会出现电解液污染,目前行业内二封机设备污染较严重;
6.独立控制,各个腔体控制独立,其中一个腔体出问题,其余腔体不受影响,设备可屏蔽其中一个离心腔体,待空闲时间再维护,不影响生产。
附图说明
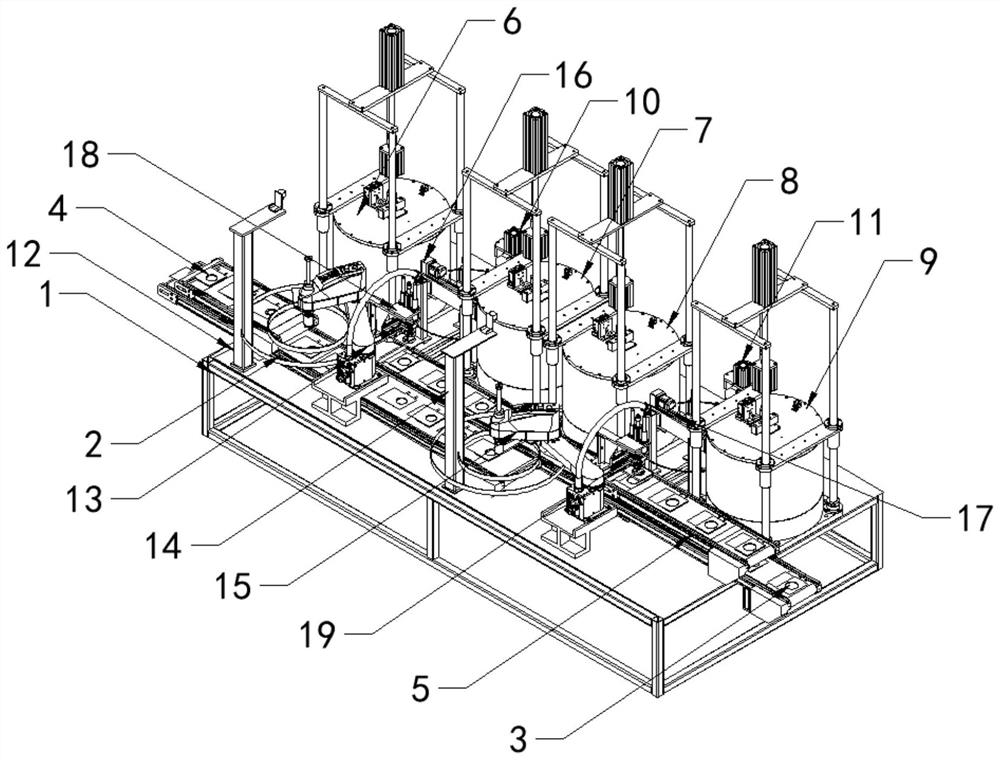
图1为本发明的立体结构示意图;
图2为本发明的俯视结构示意图。
图中:1、机架;2、二号上料拉带;3、一号下料拉带;4、一号上料拉带;5、二号下料拉带;6、A号离心腔体;7、B号离心腔体;8、C号离心腔体;9、D号离心腔体;10、第一切边机构;11、第二切边机构;12、第一CCD拍照机;13、第一上料机器人;14、第二CCD拍照机;15、第二上料机器人;16、第一腔体出料机械手;17、第二腔体出料机械手;18、第一转移机械手;19、第二转移机械手。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-2,本发明提供了一种直线式离心二封机,包括机架1,机架1顶部的中心固定设置有二号上料拉带2和一号下料拉带3,二号上料拉带2顶部的一端固定设置有一号上料拉带4,通过一号上料拉带4对接前一段设备,一号下料拉带3顶部的一端固定设置有二号下料拉带5,机架1顶部的一侧从左到右依次固定设置有A号离心腔体6、B号离心腔体7、C号离心腔体8和D号离心腔体9,一号上料拉带4提供待封装电池给A号离心腔体6和B号离心腔体7,二号上料拉带2提供待封装电池给C号离心腔体8和D号离心腔体9,A号离心腔体6与B号离心腔体7之间固定设置有第一切边机构10,C号离心腔体8与D号离心腔体9之间均固定设置有第二切边机构11,A号离心腔体6与B号离心腔体7共用第一切边机构10,C号离心腔体8与D号离心腔体9共用第二切边机构11。
优选的,机架1顶部的另一侧从左到右依次设有第一CCD拍照机12、第一上料机器人13、第二CCD拍照机14和第二上料机器人15,第一CCD拍照机12与一号上料拉带4对应设置,第二CCD拍照机14与二号上料拉带2对应设置,通过第一CCD拍照机12和第一上料机器人13对一号上料拉带4上的电池进行抓取上料,通过第二CCD拍照机14和第二上料机器人15对二号上料拉带2上的电池进行抓取上料,定位精准。
优选的,机架1顶部位于第一切边机构10的一侧设有第一腔体出料机械手16,机架1顶部位于第二切边机构11的一侧设有第二腔体出料机械手17,通过第一腔体出料机械手16在B号离心腔体7对电池封装的过程中对A号离心腔体6进行下料,通过第二腔体出料机械手17在D号离心腔体9对电池封装的过程中对C号离心腔体8进行下料,A号离心腔体6B号离心腔体7和C号离心腔体8D号离心腔体9均共用同一出料机械手且互不干扰,大大节约空间、成本。
优选的,一号下料拉带3顶部的一端和二号下料拉带5顶部的一端分别设有第一转移机械手18和第二转移机械手19,通过第一转移机械手18将封装好的电池转移到一号下料拉带3,通过第二转移机械手19将封装好的电池转移到二号下料拉带5。
优选的,一号上料拉带4的一端和二号上料拉带2的一端均设置有光源,两个光源分别与第一CCD拍照机12和第二CCD拍照机14对应设置,通过两个光源分别为第一CCD拍照机12和第二CCD拍照机14打光用,提高了位置的精准性
具体使用时,本发明一种直线式离心二封机,电池放入一号上料拉带4传送,一号上料拉带4末端有光源,配合CCD拍照机确定电池位置,在通过第一上料机器人13进行抓取电池入A号离心腔体6,每个离心腔体均有2个封装工位,每次可同时离心封装2个电池,第一上料机器人13先上其中一个封装工位电池,后A号离心腔体6转盘转动,再上另个封装工位电池,A号离心腔体6合腔,进行离心封装,第一上料机器人13负责A号离心腔体6和B号离心腔体7的上料工作,A号离心腔体6上料完毕后,第一上料机器人13再对B号离心腔体7上料,第一上料机器人13工作如此往复,A号离心腔体6封装完毕,由第一腔体出料机械手16将A号离心腔体6下料到移动平台,之后第一腔体出料机械手16再抓取A号离心腔体6的另一个封装工位的电池,进行等待,移动平台为单工位,在接到第一个电池后,转移到第一切边机构10,把电池气袋切去,再利用第一转移机械手18抓取到一号下料拉带3,移动平台再移动到腔体出料位,接A号离心腔体6的另一个电池再重复以上动作,当A号离心腔体6在进行离心封装工作时,B号离心腔体7同时在用第一上料机器人13上料,当A号离心腔体6在下料时,B号离心腔体7正在进行离心封装,因此A号离心腔体6和B号离心腔体7时间上不会冲突,上下料时间完全错开,因此A号离心腔体6和B号离心腔体7是共用第一上料机器人13,共用第一腔体出料机械手16,本设备有一号上料拉带4二号上料拉带2,一号上料拉带4提供电池给A号离心腔体6和B号离心腔体7,二号拉带提供给C号离心腔体8和D号离心腔体9,二号上料拉带2置于一号上料拉带4下方,C号离心腔体8D号离心腔体9工作上下料模式和A号离心腔体6B号离心腔体7模式相同,A号离心腔体6B号离心腔体7下料到一号下料拉带3,C号离心腔体8D号离心腔体9号离心腔体下料到二号下料拉带5,二号下料拉带5置于一号上料拉带4上方,两者独立传输电池,互不干扰。
尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种直线式离心二封机
- 一种直线式离心二封机