一种基于多视觉传感器的CT辅助装置
文献发布时间:2023-06-19 11:30:53
技术领域
本发明涉及临床医学技术领域,更具体地说,涉及一种基于多视觉传感器的CT辅助装置。
背景技术
医用CT是当今临床医学上应用最多的常规检测设备之一,目前已经被广泛应用于疾病检测、血管造影、心脏成像、介入治疗等诸多临床医学领域。
CT临床使用中,通常医师需要采集CT机架在0度、90度位置X射线图像,然后根据该X射线图像划定断层扫描起始、终止位置,进而进行断层扫描,扫描过程中,受检对象的呼吸等带来的器官运动会造成图像伪影,给精准定位、准确靶区勾画带来了很大的困扰。另外,通过采集CT机架0度、90度位置X射线图像定位的方式,需要机架转到0度位置、机架停止、然后出束采集一副图像,然后再转到90度位置、机架停止、然后出束采集一副图像,流程十分繁琐,而且受检对象在该过程中要吸收过多剂量X射线。
现有解决方案中针对受检对象呼吸运动伪影问题,多是采用红外相机+特制标记球的方式,通过检测多个特制标记球的位置变化获取受检对象的呼吸曲线。
现有解决方案中针对受检对象呼吸运动伪影问题,多是采用腹压带的方式,通过检测腹压带气压的变化获取受检对象的呼吸曲线;
现有解决方案中针对定位像获取断层扫描范围问题,多是采用在机架0度、90度分别出束采集X射线图像。
采用红外相机+特制标记球方式获取受检对象呼吸曲线解决方案,存在红外相机价格高昂,标记球需要特别定制、特殊材质等问题,而且标记球需要多个。
采用腹压带方式获取受检对象呼吸曲线解决方案,存在受检对象受到束缚、腹压带对气压有很高要求等问题。
综上所述,如何降低成本、简化标记球、避免束缚受检对象,是目前本领域技术人员亟待解决的问题。
发明内容
有鉴于此,本发明的目的是提供一种基于多视觉传感器的CT辅助方法及装置,该基于多视觉传感器的CT辅助方法及装置结构简单、成本较低,标记球无需采用特殊材质定制,且无需束缚受检对象。
为了实现上述目的,本发明提供如下技术方案:
一种基于多视觉传感器的CT辅助装置,包括:
标记块,用于粘贴于受检对象;
图像获取装置,用于获取受检对象的图像、位置数据信息及所述标记块随着受检对象呼吸起伏时的位置变换信息;
图像处理装置,用于根据所述图像和所述位置数据信息标定扫描起始、停止位置,并根据所述位置变换信息产生呼吸曲线;
呼吸门控控制装置,用于根据所述扫描起始、停止位置扫描受检对象、并根据所述呼吸曲线调节出束装置的出束;
所述图像获取装置和所述图像处理装置信号连接,所述呼吸门控控制装置分别与所述图像处理装置和所述出束装置信号连接。
优选地,所述图像包括:受检对象平躺时的俯视图像和侧视图像。
优选地,所述呼吸门控控制装置根据时相和所述呼吸曲线调节所述出束装置的出束。
优选地,所述图像获取装置包括若干摄像头及用于安装所有所述摄像头的机架。
优选地,所述摄像头包括顶部摄像头和设置于所述顶部摄像头两侧的侧部摄像头。
优选地,所述机架包括悬吊机架,所述顶部摄像头和所述侧部摄像头均可活动的设置于所述悬吊机架。
优选地,所述出束装置为CT机。
优选地,所述标记块的下部设置粘胶或魔术贴。
本发明通过在受检对象身上粘贴标记块,图像获取装置监测受检对象呼吸情况,标记块不需要特殊定制。通过图像获取装置和图像处理装置可确定断层扫描开始、停止位置以及所需剂量的解决方案,无需转动CT机架在0度、90度位置拍摄受检对象X射线图像来获取断层扫描数据,进而简化了CT断层扫描前定位流程;通过呼吸门控控制装置根据呼吸曲线调节出束装置的出束,避免了受检对象受到多余X射线的伤害。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
图1为本发明所提供的侧部摄像头和机架的示意图;
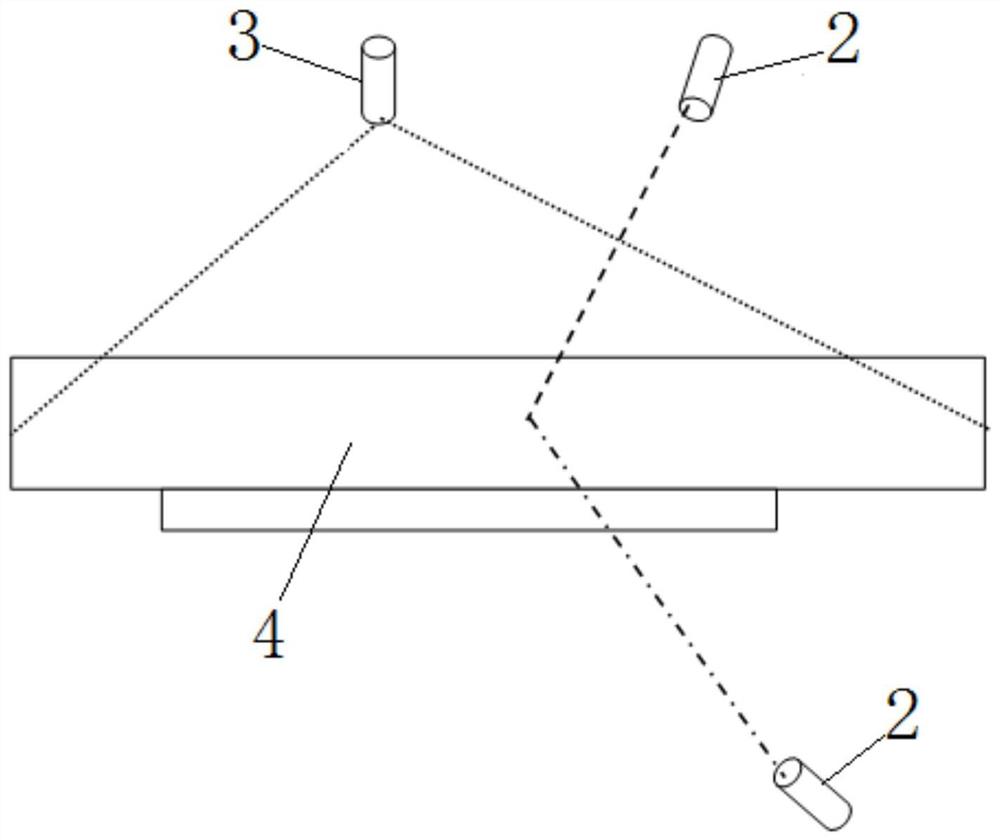
图2为本发明所提供的顶部摄像头和侧部摄像头的拍摄示意图。
图1-2中:
1-机架、2-侧部摄像头、3-顶部摄像头、4-检测台。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明的核心是提供一种基于多视觉传感器的CT辅助方法及装置,该基于多视觉传感器的CT辅助方法及装置结构简单、成本较低,标记球无需采用特殊材质定制,且无需束缚受检对象。
请参考图1~2,一种基于多视觉传感器的CT辅助装置,包括:
标记块,用于粘贴于受检对象;
图像获取装置,用于获取受检对象的图像、位置数据信息及标记块随着受检对象呼吸起伏时的位置变换信息;
图像处理装置,用于根据图像和位置数据信息标定扫描起始、停止位置,并根据位置变换信息产生呼吸曲线;
呼吸门控控制装置,用于根据扫描起始、停止位置扫描受检对象、并根据呼吸曲线调节出束装置的出束;
图像获取装置和图像处理装置信号连接,呼吸门控控制装置分别与图像处理装置和出束装置信号连接。
需要说明的是,标记块不需要进行特别定制,也不需要采用特殊材料制作,标记块可以为纸块、橡胶块等,只要可以被图像获取装置识别即可,标记块无需采用多个,最少只需要一个,粘贴于受检对象的腹部即可。
通过使用图像获取装置获取受检对象的图像,进而获取受检对象的位置数据信息,无需将CT机架1分别转动到不同位置,医师可以在摄像机图像上划定断层扫描起始、停止范围,进而获取断层图像,无需出束拍摄受检对象X射线图像来获取CT断层扫描范围及所用剂量。
图像处理装置和图像获取装置通过网线连接,用以接收图像获取装置采集的受检对象的图像、位置数据信息以及标记物的位置变换信息,根据受检对象的图像、位置数据信息确定断层扫描开始、停止位置并发送给出束装置,以及根据标记物的位置变换信息产生呼吸曲线。
本发明通过在受检对象身上粘贴标记块,图像获取装置监测受检对象呼吸情况,标记块不需要特殊定制。通过图像获取装置和图像处理装置可确定断层扫描开始、停止位置以及所需剂量的解决方案,无需转动CT机架1在0度、90度位置拍摄受检对象X射线图像来获取断层扫描数据,进而简化了CT断层扫描前定位流程;通过呼吸门控控制装置根据呼吸曲线调节出束装置的出束,避免了受检对象受到多余X射线的伤害。
由于受检对象在检查时,为平躺在检测台4上,为了准确收集受检对象的图像,在上述实施例的基础上,作为进一步的优选,图像包括:受检对象平躺时的俯视图像和侧视图像。侧视图像为沿受检对象两侧拍摄的侧面图像,俯视图像为受检对象平躺时,由受检对象的上方向下拍摄的受检对象的正面图像。由正面图像和侧面图像可准确得出受检对象的位置信息。
在上述实施例的基础上,作为进一步的优选,呼吸门控控制装置根据时相和呼吸曲线调节出束装置的出束。图像处理装置通过网线和呼吸门控控制装置连接,呼吸门控控制装置根据呼吸曲线,向出束装置输出硬件门控触发信号,用以控制出束装置在相应呼吸时相的出束,调节出束量在合理数值。
在上述实施例的基础上,作为进一步的优选,图像获取装置包括若干摄像头及用于安装所有摄像头的机架1。
需要说明的是,机架1设置在检测台4的侧部和上部,摄像头的数量可根据实际拍摄效果设置,通过摄像头识别标记块的位置信息,取代红外相机和特制标记球的呼吸门控方案,解决了受检对象呼吸运动带来的运动伪影给CT定位、靶区勾画带来的干扰问题。
用不同角度安装的多个摄像机,通过摄像机获取受检对象的图像、位置数据信息以及受检对象呼吸时贴于其身上的标记块随着受检对象呼吸起伏时的位置变换信息
在上述实施例的基础上,作为进一步的优选,摄像头包括顶部摄像头3和设置于顶部摄像头3两侧的侧部摄像头2。顶部摄像头3可清晰拍摄受检对象的正面图像,侧部摄像头2可清晰拍摄受检对象的侧面图像,以准确获取受检对象的位置信息。摄像头还可以获取受检对象呼吸时贴于其身上的标记块随着受检对象呼吸起伏时的位置变换信息。
在上述实施例的基础上,作为进一步的优选,机架1包括悬吊机架,顶部摄像头3和侧部摄像头2均可活动的设置于悬吊机架。本实施例所提供的悬吊机架可稳定安装顶部摄像头3和侧部摄像头2,且悬吊机架悬吊在半空,可活动设置,不占用地面空间,便于人员活动,侧部摄像头2可根据需要拍摄的角度调节位置,结构简单,成本较低,此外,检测台4可设置于悬吊机架的下方,便于对受检对象检测。
在上述实施例的基础上,作为进一步的优选,出束装置为CT机。CT机的输出X射线的量可调节,且CT机的扫描精度高,以对受检对象进行精确治疗。
在上述实施例的基础上,作为进一步的优选,标记块的下部设置粘胶或魔术贴。通过粘胶可将标记块粘贴在受检对象的身体上,在进行扫描时,还可以根据受检对象的呼吸情况调节标记块的粘贴位置,便于拆装。当然,也可以通过其他可固定且可拆卸的装置来固定标记块,例如针、卡扣等装置。
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
以上对本发明所提供的基于多视觉传感器的CT辅助装置进行了详细介绍。本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以对本发明进行若干改进和修饰,这些改进和修饰也落入本发明权利要求的保护范围内。
- 一种基于多视觉传感器的CT辅助装置
- 一种基于Kinect视觉深度传感器的交互仿生机械臂控制方法