智能语音分类垃圾桶
文献发布时间:2023-06-19 11:54:11
技术领域
本发明涉及垃圾分类技术领域,尤其涉及智能语音分类垃圾桶。
背景技术
垃圾桶,是人们生活中“藏污纳垢”的容器,随着人们环保意识的提高、发达国家在垃圾分类处理上的成功经验,以及国家的重视,垃圾分类的推动不可阻挡,分类垃圾桶为不可缺少的装置。
专利号CN202020126840.3公开了家庭智能语音分类垃圾桶,包括垃圾桶主体以及垃圾桶盖,所述垃圾桶盖安装在垃圾桶主体上方,所述垃圾桶主体上方前端设有锁紧扣,所述垃圾桶盖前端设有卡扣,所述垃圾桶主体前端设有语音分类结构,所述垃圾桶盖上方内侧设有除臭结构,所述语音分类结构,包括:场效应管模块、语音录放模块、电池槽、电池以及喇叭,此专利解决了垃圾的异味问题,但无法对垃圾进行分类放置。
专利号CN201911245665.8公开了一种全自动旋转式智能语音分类垃圾桶,由底部电机、四分类垃圾桶、带内齿轮的四分类垃圾桶主轴、垃圾压缩装置、垃圾通道口、麦克风、扬声器、电推杆、电拉杆、控制部分等组成。底部旋转电机通过齿轮与四分类垃圾桶主轴耦合,电拉杆连接排放口平板构成垃圾排放口,电推杆连接带压力传感器的平板组成压缩板,此专利解决了缩小分类桶尺寸,减少垃圾袋更换次数的问题,但无法将垃圾种类信息通过语音播报形式反馈可用户,让用户了解垃圾分类信息。
为此,我们提出智能语音分类垃圾桶来解决上述问题。
发明内容
本发明的目的是为了解决现有技术中存在的缺点,而提出的智能语音分类垃圾桶。
为了实现上述目的,本发明采用了如下技术方案:智能语音分类垃圾桶,其特征在于,包括以下步骤:
S1:采用US516P6语音识别模块来识别特定的语音指令;
S2:经STM32控制系统的数据处理做出判断,垃圾种类信息通过语音播报形式反馈可用户,让用户了解垃圾分类信息;
S3:当垃圾桶识别垃圾种类后,会控制舵机将垃圾桶调整至需要调节的模式,以供用户投放垃圾;
S4:延时一定时间后垃圾桶自动关闭。
优选的,所述步骤S3中垃圾桶包括调节机构和分类机构,所述调节机构包括分类盛放架和分类调整机构,所述分类盛放架的内腔安装有分类调整机构,所述分类机构包括组装底板、第一盛料槽、第二盛料槽、第三盛料槽和第四盛料槽。
优选的,所述分类盛放架包括架体、通料腔、贯穿孔、边缘出料壳、支撑柱和支撑架,所述架体的中间开设有通料腔,所述通料腔的内腔壁一侧两端均开设有贯穿孔,所述架体的侧端安装有边缘出料壳,所述架体的下端通过支撑柱与支撑架活动连接。
优选的,所述分类调整机构包括调整板、通透漏孔、边缘挡条、组装片、弹性柱、阻挡伸缩板、衔接条板、带动轴和驱动控制终端,所述调整板的端面排列开设有通透漏孔,所述调整板的上端两侧开设有边缘挡条,所述调整板的两端一侧均开设有组装片,所述组装片的上端安装有弹性柱,所述弹性柱之间的顶端安装有衔接条板,所述衔接条板的下端安装有阻挡伸缩板,所述调整板的另一侧贯穿设置有带动轴,所述带动轴的另一端安装有驱动控制终端。
优选的,所述步骤1中US516P6语音识别模块中5脚和6脚连接喇叭,7脚与8脚连接麦克,11脚、12脚和STM32F10X主控制器采用UART串行接口连接。
优选的,所述步骤S3中,舵机控制需要20ms的时基脉冲,该脉冲的高电平部分一般为0.5ms~2.5ms范围内的角度控制脉冲部分,具体关系如下:
t=0.5ms——————舵机会转动0°
t=1.0ms——————舵机会转动45°
t=1.5ms——————舵机会转动90°
t=2.0ms——————舵机会转动135°
t=2.5ms——————舵机会转动180°
优选的,所述舵机转交角度为0-180°,反应转速为0.12S/60,其具有+5V,GND及控制信号三个引脚。
优选的,所述舵机与驱动控制终端电性连接,驱动控制终端带动带动轴进行正反180度旋转。
与现有技术相比,本发明的有益效果为:
1、本发明提出的智能语音分类垃圾桶,在US516P6语音识别模块识别特定的语音指令后,STM32控制系统的数据处理做出判断,系统使用时,首先使用唤醒词“垃圾桶你好”唤醒垃圾桶,垃圾桶回复“你需要投放什么垃圾”回复词后,用户可以说出需要投放垃圾的名称,目前建立的语音词条库如下,后期可逐渐增加,回复“可回收垃圾”,可识别物品:书本、报纸、纸箱、纺织物、皮包、信封、玻璃放大镜、金属、纸袋、玩具、易拉罐、积木、皮鞋、保鲜盒塑料铝、玻璃、衣架等;回复“厨余垃圾”,可识别物品:果皮、果核、茶渣等;回复“其他垃圾”,可识别物品:卫生间用纸、塑料袋、尘土、砖块、烟头、胶带、毛巾等;回复“有害垃圾”,可识别物品:药品、油漆桶、卤素灯、荧光灯管、消毒液、镍铝电池,当系统识别投放物品后,系统会控制舵机打开对应的分类垃圾桶,驱动控制终端129带动带动轴128进行正反180度旋转,通过调整带动轴128的旋转角度使调整板121上端放置的垃圾向侧端进行滑动,在调整调整板121的四种倾斜角度时,可将阻挡伸缩板126向上提拉,垃圾因重力向下进入数据判断出的第一盛料槽22、第二盛料槽23、第三盛料槽24和第四盛料槽25的内腔,第一盛料槽22、第二盛料槽23、第三盛料槽24和第四盛料槽25的内腔分别为可回收垃圾、厨余垃圾、其他垃圾和有害垃圾,以供用户投放垃圾,延时一定时间后垃圾桶自动关闭。
2、本发明提出的智能语音分类垃圾桶,舵机控制需要20ms的时基脉冲,该脉冲的高电平部分一般为0.5ms~2.5ms范围内的角度控制脉冲部分,具体关系如下:
t=0.5ms——————舵机会转动0°
t=1.0ms——————舵机会转动45°
t=1.5ms——————舵机会转动90°
t=2.0ms——————舵机会转动135°
t=2.5ms——————舵机会转动180°
舵机转交角度为0-180°,反应转速为0.12S/60,其具有+5V,GND及控制信号三个引脚,延时一定时间后垃圾桶自动关闭。
附图说明
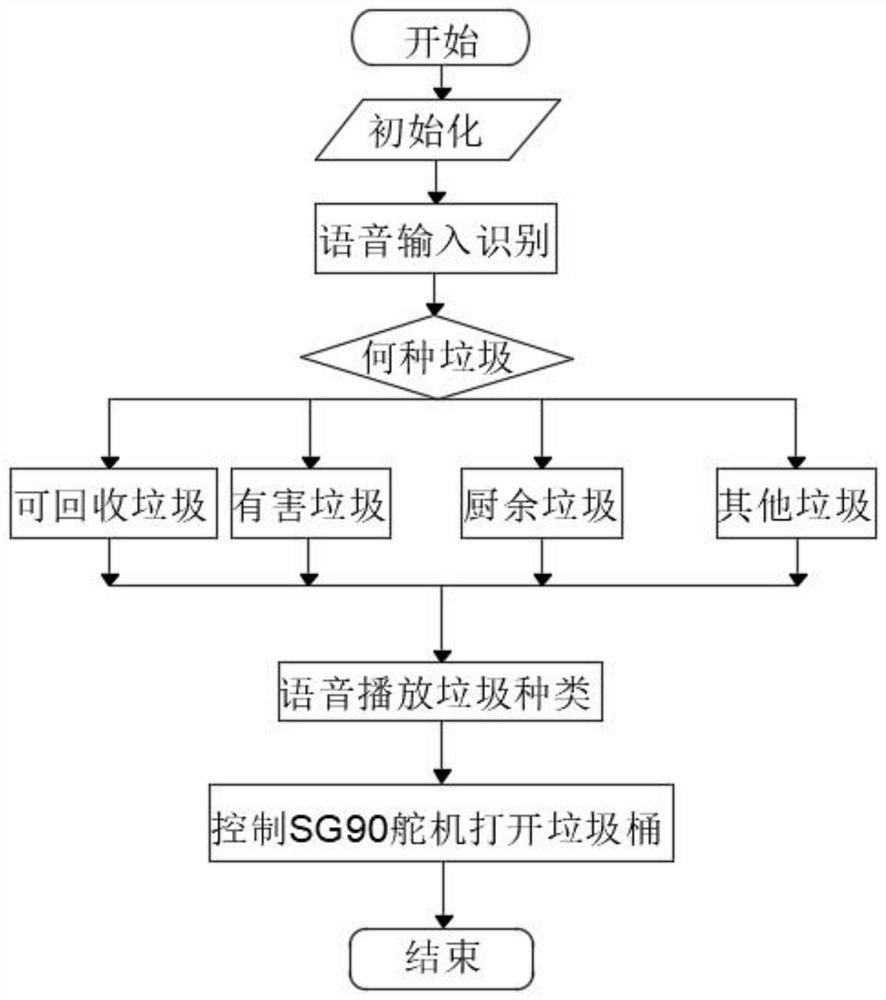
图1为本发明提出的整体流程图;
图2为STM32控制系统图;
图3为US516P6语音识别模块图;
图4为垃圾桶结构示意图;
图5为分类盛放架结构示意图;
图6为分类调整机构结构示意图。
图中:1、调节机构;2、分类机构;11、分类盛放架;111、架体;112、通料腔;113、贯穿孔;114、边缘出料壳;115、支撑柱;116、支撑架;12、分类调整机构;121、调整板;122、通透漏孔;123、边缘挡条;124、组装片;125、弹性柱;126、阻挡伸缩板;127、衔接条板;128、带动轴;129、驱动控制终端;21、组装底板;22、第一盛料槽;23、第二盛料槽;24、第三盛料槽;25、第四盛料槽。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
实施例1
参照图1-3,采用US516P6语音识别模块来识别特定的语音指令,US516P6语音识别模块中5脚和6脚连接喇叭,7脚与8脚连接麦克,11脚、12脚和STM32F10X主控制器采用UART串行接口连接,经STM32控制系统的数据处理做出判断,垃圾种类信息通过语音播报形式反馈可用户,让用户了解垃圾分类信息,当垃圾桶识别垃圾种类后,会控制舵机将垃圾桶调整至需要调节的模式,以供用户投放垃圾,舵机控制需要20ms的时基脉冲,该脉冲的高电平部分一般为0.5ms~2.5ms范围内的角度控制脉冲部分,具体关系如下:
t=0.5ms——————舵机会转动0°
t=1.0ms——————舵机会转动45°
t=1.5ms——————舵机会转动90°
t=2.0ms——————舵机会转动135°
t=2.5ms——————舵机会转动180°
舵机转交角度为0-180°,反应转速为0.12S/60,其具有+5V,GND及控制信号三个引脚,延时一定时间后垃圾桶自动关闭。
实施例2
参照图4-6,步骤S3中垃圾桶包括调节机构1和分类机构2,调节机构1包括分类盛放架11和分类调整机构12,分类盛放架11的内腔安装有分类调整机构12,分类机构2包括组装底板21、第一盛料槽22、第二盛料槽23、第三盛料槽24和第四盛料槽25,分类盛放架11包括架体111、通料腔112、贯穿孔113、边缘出料壳114、支撑柱115和支撑架116,架体111的中间开设有通料腔112,通料腔112的内腔壁一侧两端均开设有贯穿孔113,架体111的侧端安装有边缘出料壳114,架体111的下端通过支撑柱115与支撑架116活动连接,分类调整机构12包括调整板121、通透漏孔122、边缘挡条123、组装片124、弹性柱125、阻挡伸缩板126、衔接条板127、带动轴128和驱动控制终端129,调整板121的端面排列开设有通透漏孔122,调整板121的上端两侧开设有边缘挡条123,调整板121的两端一侧均开设有组装片124,组装片124的上端安装有弹性柱125,弹性柱125之间的顶端安装有衔接条板127,衔接条板127的下端安装有阻挡伸缩板126,调整板121的另一侧贯穿设置有带动轴128,带动轴128的另一端安装有驱动控制终端129,舵机与驱动控制终端129电性连接,驱动控制终端129带动带动轴128进行正反180度旋转。
实施例3
参照图1-6,在US516P6语音识别模块识别特定的语音指令后,STM32控制系统的数据处理做出判断,系统使用时,首先使用唤醒词“垃圾桶你好”唤醒垃圾桶,垃圾桶回复“你需要投放什么垃圾”回复词后,用户可以说出需要投放垃圾的名称,目前建立的语音词条库如下,后期可逐渐增加,回复“可回收垃圾”,可识别物品:书本、报纸、纸箱、纺织物、皮包、信封、玻璃放大镜、金属、纸袋、玩具、易拉罐、积木、皮鞋、保鲜盒塑料铝、玻璃、衣架等;回复“厨余垃圾”,可识别物品:果皮、果核、茶渣等;回复“其他垃圾”,可识别物品:卫生间用纸、塑料袋、尘土、砖块、烟头、胶带、毛巾等;回复“有害垃圾”,可识别物品:药品、油漆桶、卤素灯、荧光灯管、消毒液、镍铝电池,当系统识别投放物品后,系统会控制舵机打开对应的分类垃圾桶,驱动控制终端129带动带动轴128进行正反180度旋转,通过调整带动轴128的旋转角度使调整板121上端放置的垃圾向侧端进行滑动,在调整调整板121的四种倾斜角度时,可将阻挡伸缩板126向上提拉,垃圾因重力向下进入数据判断出的第一盛料槽22、第二盛料槽23、第三盛料槽24和第四盛料槽25的内腔,第一盛料槽22、第二盛料槽23、第三盛料槽24和第四盛料槽25的内腔分别为可回收垃圾、厨余垃圾、其他垃圾和有害垃圾,以供用户投放垃圾,延时一定时间后垃圾桶自动关闭。
工作原理:在US516P6语音识别模块识别特定的语音指令后,STM32控制系统的数据处理做出判断,系统使用时,首先使用唤醒词“垃圾桶你好”唤醒垃圾桶,垃圾桶回复“你需要投放什么垃圾”回复词后,用户可以说出需要投放垃圾的名称,目前建立的语音词条库如下,后期可逐渐增加,回复“可回收垃圾”,可识别物品:书本、报纸、纸箱、纺织物、皮包、信封、玻璃放大镜、金属、纸袋、玩具、易拉罐、积木、皮鞋、保鲜盒塑料铝、玻璃、衣架等;回复“厨余垃圾”,可识别物品:果皮、果核、茶渣等;回复“其他垃圾”,可识别物品:卫生间用纸、塑料袋、尘土、砖块、烟头、胶带、毛巾等;回复“有害垃圾”,可识别物品:药品、油漆桶、卤素灯、荧光灯管、消毒液、镍铝电池,当系统识别投放物品后,系统会控制舵机打开对应的分类垃圾桶,驱动控制终端129带动带动轴128进行正反180度旋转,通过调整带动轴128的旋转角度使调整板121上端放置的垃圾向侧端进行滑动,在调整调整板121的四种倾斜角度时,可将阻挡伸缩板126向上提拉,垃圾因重力向下进入数据判断出的第一盛料槽22、第二盛料槽23、第三盛料槽24和第四盛料槽25的内腔,第一盛料槽22、第二盛料槽23、第三盛料槽24和第四盛料槽25的内腔分别为可回收垃圾、厨余垃圾、其他垃圾和有害垃圾,以供用户投放垃圾,延时一定时间后垃圾桶自动关闭。
上述实施例为本发明较佳的实施方式,但本发明的实施方式并不受上述实施例的限制,其他的任何未背离本发明的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
在本发明的描述中,需要理解的是,指示方位或位置关系的术语为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
- 一种能够智能语音垃圾分类的智能家用收纳垃圾桶
- 智能语音分类垃圾桶