感应装置、定位模组和定位方法
文献发布时间:2023-06-19 11:55:48
技术领域
本发明实施方式涉及电子技术领域,特别涉及一种感应装置、定位模组和定位方法。
背景技术
在各种工业设备、以及移动设备中均需要进行定位,例如:半导体制造中需要实现平台的精准对位以便于实现元器件的制备,手机摄像头中需要捕捉镜头的抖动以实现防抖动功能。因此,在各种工业设备以及移动设备中均需一种感应装置以实现位置检测。
目前的位置检测的主要方法之一是利用霍尔传感器,将霍尔传感器固定在磁场中,利用不同距离时磁场强度的变化使得内建电势发生变化而实现位置检测。然而,霍尔传感器仅能实现水平面的一维运动检测,对于多方向运动很难用一个霍尔传感器进行检测。
发明内容
本发明实施方式的目的在于提供一种感应装置、定位模组和定位方法,能够实现对多方向运动的检测。
为解决上述技术问题,本发明的实施方式提供了一种感应装置,包括:第一平台、第二平台、设置于所述第一平台的至少一个磁性部、以及设置于所述第二平台的至少两个走线部;所述磁性部和所述走线部相向设置,各所述走线部的走线方向不同;所述第一平台和所述第二平台相对运动时带动所述走线部与所述磁性部相对运动,所述走线部与所述磁性部相对运动时,所述走线部产生磁感应电流。
本发明实施方式相对于相关技术而言提供了一种感应装置,包括:第一平台、第二平台、设置于第一平台的至少一个磁性部、以及设置于第二平台的至少两个走线部;磁性部和走线部相向设置。由于各走线部的走线方向不同,因此,当第一平台和第二平台在不同方向上发生相对运动,带动走线部与磁性部在不同方向上相对运动时,至少有一个走线部内会产生感应电流以实现对该方向上运动的检测,因此,本实施例中的感应装置能够实现对多方向运动的检测。
另外,所述走线部的数量为两个、且每个所述走线部包括两个子走线部;两个所述走线部的四个所述子走线部呈田字排列,且处于对角位置的两个所述子走线部的走线方向相同。
另外,所述磁性部的数量为两个、且每个磁性部包括两个子磁性部;两个所述磁性部的四个所述子磁性部呈田字排列,且处于对角位置的两个所述子磁性部朝向所述走线部的磁极的极性相同。
另外,两个所述磁性部朝向所述走线部的磁极的极性相反。
另外,所述走线部的数量为两个,两个所述走线部层叠设置且相互绝缘。
另外,至少两个所述走线部的走线方向相互垂直。
另外,所述走线部包括平行排布的多根导线,所述多根导线间隔排布且相邻两根导线之间的间距相等。
另外,所述走线部上设置有绝缘层,所述绝缘层覆盖所述多根导线、且填充所述相邻两根导线之间的间距。
另外,所述走线部包括平行排布的多根导线、且每根导线外包覆有绝缘层,所述多根导线紧邻排布。
另外,所述第一平台和所述第二平台相互平行。
本发明的实施方式还提供了一种定位模组,包括处理装置,以及上述感应装置;所述处理装置连接于所述感应装置中的所述走线部,且用于根据所述走线部输出的磁感应电流确定所述第一平台与第二平台的相对位移。
另外,每个所述子走线部包括平行排布的多根导线,每个所述子走线部内的多根导线并联后连接所述处理装置。
另外,所述处理装置包括:四个第一电压转换器、第一模数转换器以及第一处理芯片;四个所述第一电压转换器与四个所述子走线部一一对应,每个所述子走线部内的多根导线并联后连接一个所述第一电压转换器;四个所述第一电压转换器均连接至所述第一模数转换器,所述第一模数转换器连接至所述第一处理芯片。
另外,每个所述子走线部包括平行排布的多根导线,且每根所述导线均通过独立引线连接至所述处理装置。
另外,所述处理装置包括:多个第二电压转换器、第一多路复用器、第二模数转换器以及第二处理芯片;多个所述第二电压转换器与多根所述导线一一对应,每根所述导线均通过独立引线连接至一个所述第二电压转换器;多个所述第二电压转换器均连接至所述第一多路复用器,所述第一多路复用器与所述第二模数转换器连接,所述第二模数转换器与所述第二处理芯片连接。
本发明的实施方式还提供了一种定位方法,应用于感应装置,所述感应装置包括:第一平台、第二平台、设置于所述第一平台的两个磁性部、以及设置于所述第二平台的两个走线部;所述磁性部和所述走线部相向设置,各所述走线部的走线方向不同,两个所述磁性部朝向所述走线部的磁极的极性相反;所述两个走线部中每个所述走线部包括两个子走线部,两个所述走线部的四个所述子走线部呈田字排列,且处于对角位置的两个所述子走线部的走线方向相同;所述两个磁性部中每个磁性部包括两个子磁性部,两个所述磁性部的四个所述子磁性部呈田字排列,且处于对角位置的两个所述子磁性部朝向所述走线部的磁极的极性相同;所述第一平台和所述第二平台相对运动时带动所述走线部与所述磁性部相对运动,所述走线部与所述磁性部相对运动时,所述走线部产生磁感应电流;所述定位方法包括:识别产生所述磁感应电流的子走线部;根据产生磁感应电流的所述子走线部确定移动方向;根据所述磁感应电流的大小计算移动距离和偏移角度;根据所述移动方向、所述偏移角度和所述移动距离确定所述第一平台和所述第二平台的相对位移。
另外,每个所述子走线部包括多根平行排布的导线,且任意相邻两个导线之间的间距相同;所述根据所述磁感应电流的大小确定移动距离包括:根据所述磁感应电流的大小确定所述子导线部偏移所述子磁性部的导线的条数;根据所述导线的条数以及所述间距确定所述移动距离。
本发明的另一实施方式还提供了一种定位方法,应用于感应装置,所述感应装置包括第一平台、第二平台、设置于所述第一平台的至少一个磁性部、以及设置于所述第二平台的两个走线部,两个所述走线部层叠设置且相互绝缘,且每个所述子走线部包括多个平行排布的导线;所述磁性部和所述走线部相向设置,各所述走线部的走线方向不同;所述第一平台和所述第二平台相对运动时带动所述走线部与所述磁性部相对运动;所述定位方法包括:获取相对运动前所述走线部产生的第一磁感应电流,以及相对运动后所述走线部产生的第二磁感应电流;识别产生所述第一磁感应电流的导线在其所属走线部中的第一位置、以及产生所述第二磁感应电流的导线在其所属走线部中的第二位置,并根据所述第一位置和所述第二位置确定移动距离和移动方向;根据所述移动方向和所述移动距离确定所述第一平台和所述第二平台的相对位移。
附图说明
一个或多个实施方式通过与之对应的附图中的图片进行示例性说明,这些示例性说明并不构成对实施方式的限定,附图中具有相同参考数字标号的元件表示为类似的元件,除非有特别申明,附图中的图不构成比例限制。
图1是根据本发明第一实施方式的感应装置的结构示意图;
图2是根据本发明第一实施方式的磁性部的结构示意图;
图3是根据本发明第一实施方式的走线部的结构示意图;
图4是根据本发明第一实施方式的子走线部内导线的一种结构示意图;
图5是根据本发明第一实施方式的子走线部内导线的另一种结构示意图;
图6是根据本发明第一实施方式的子走线部内导线的再一种结构示意图;
图7是根据本发明第二实施方式的感应装置的结构示意图;
图8是根据本发明第二实施方式的磁性部的结构示意图;
图9是根据本发明第二实施方式的走线部的结构示意图;
图10是根据本发明第三实施方式的定位模组的结构示意图;
图11是根据本发明第四实施方式的定位模组的结构示意图;
图12是根据本发明第五实施方式的定位方法的流程示意图;
图13是根据本发明第五实施方式的一种移动方式的走线部的电流示意图;
图14是根据本发明第五实施方式的另一种移动方式的走线部的电流示意图;
图15是根据本发明第五实施方式的再一种移动方式的走线部的电流示意图;
图16是根据本发明第六实施方式的定位方法的流程示意图;
图17是根据本发明第六实施方式的一种移动方式的走线部的电流示意图;
图18是根据本发明第六实施方式的另一种移动方式的走线部的电流示意图;
图19是根据本发明第六实施方式的再一种移动方式的走线部的电流示意图。
具体实施方式
为使本发明实施方式的目的、技术方案和优点更加清楚,下面将结合附图对本发明的各实施方式进行详细的阐述。然而,本领域的普通技术人员可以理解,在本发明各实施方式中,为了使读者更好地理解本申请而提出了许多技术细节。但是,即使没有这些技术细节和基于以下各实施方式的种种变化和修改,也可以实现本申请所要求保护的技术方案。
本发明的第一实施方式涉及一种感应装置,本实施方式的核心在于包括:第一平台、第二平台、设置于所述第一平台的至少一个磁性部、以及设置于所述第二平台的至少两个走线部;所述磁性部和所述走线部相向设置,各所述走线部的走线方向不同;所述第一平台和所述第二平台相对运动时带动所述走线部与所述磁性部相对运动,所述走线部与所述磁性部相对运动时,所述走线部产生磁感应电流。
本实施例中感应装置,包括:第一平台、第二平台、设置于第一平台的至少一个磁性部、以及设置于第二平台的至少两个走线部;磁性部和走线部相向设置。由于各走线部的走线方向不同,因此,当第一平台和第二平台在不同方向上发生相对运动,带动走线部与磁性部在不同方向上相对运动时,至少有一个走线部内会产生感应电流以实现对该方向上运动的检测,因此,本实施例中的感应装置能够实现对多方向运动的检测。
下面对本实施方式的感应装置的实现细节进行具体的说明,以下内容仅为方便理解提供的实现细节,并非实施本方案的必须。
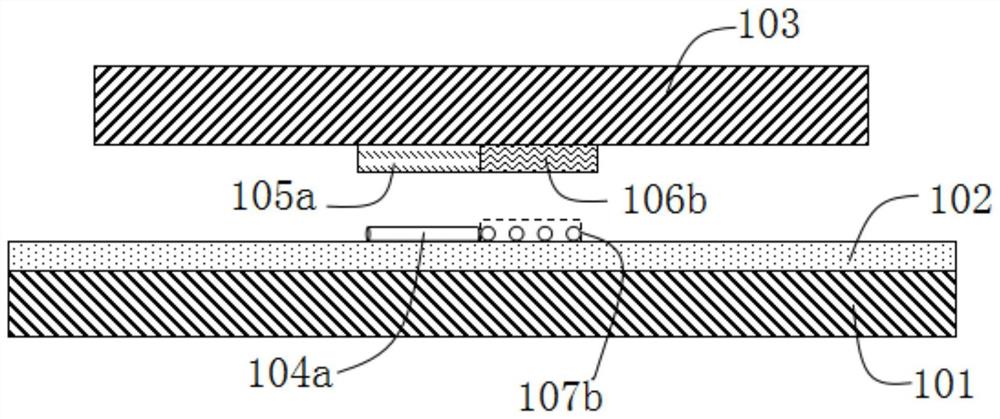
本实施方式中的感应装置的结构示意图如图1所示:
感应装置包括:第一平台103、第二平台101、设置于第一平台103的至少一个磁性部、以及设置于第二平台101的至少两个走线部。其中,第一平台103和第二平台101可以为固定的基底,例如硅片,玻璃等材质,在使用时,可将该基底设置于需要进行运动检测的工作台或部件中央。第一平台103和第二平台101也可为需要进行运动检测的工作台或部件,磁性部和走线部可以直接粘附或者嵌入需要进行运动检测的工作台或部件中央。
磁性部和走线部相向设置,至少两个走线部的走线方向不同;第一平台103和第二平台101相对运动时带动走线部与磁性部相对运动,走线部与磁性部相对运动时,走线部产生磁感应电流。本实施例中由于磁性部和走线部相向设置,且至少两个走线部的走线方向不同,因此,当第一平台103和第二平台101在不同方向上发生相对运动,带动走线部与磁性部在不同方向上相对运动时,至少有一个走线部内会产生感应电流以实现对该方向上运动的检测,因此,本实施例中的感应装置能够实现对多方向运动的检测。
值得说明的是,本实施例中的第一平台103、第二平台101、磁性部和走线部可以设置的很小,以实现对微小部件的移动检测,例如:可将本实施例中的感应装置应用于终端设备的图像传感器芯片的抖动检测,可将设置有磁性部的第一平台103设置于图像传感器芯片中央位置,将设置有走线部的第二平台101设置于终端基底上与该图像传感器芯片的中央位置相对应的位置处。如此,当图像传感器芯片发生抖动时,设置有磁性部的第一平台103与设置有走线部的第二平台101会发生相对运动,此时,便可根据走线部产生的磁感应电流来确定图像传感器芯片的位移。
在部分实施例中,第一平台103和第二平台101相互平行。也就是说,设置于第一平台103的磁性部,以及设置于第二平台101的走线部相互平行,如此,磁性部与各走线部之间的垂直距离相同,使得各走线部所在磁场的磁场强度大致相同,从而便于根据各走线部所产生的磁感应电流来确定第一平台103和所述第二平台101的相对位移。
在部分实施例中,至少两个走线部的走线方向相互垂直。也就是说,在第二平台101所在平面上,至少两个走线部的走线方向相互垂直,若至少两个走线部中一个走线部的走线方向为该第二平台101所在平面的X方向时,至少有一个走线部的走线方向为该第二平台101所在平面的Y方向。
如图3所示,在一些实施例中,走线部的数量为两个、且每个走线部包括两个子走线部;两个走线部的四个子走线部呈田字排列,且处于对角位置的两个子走线部的走线方向相同。
具体地说,四个子走线部包括:子走线部104a、子走线部104b、子走线部107a和子走线部107b。每个子走线部朝向磁性部的表面呈正方形,四个子走线部呈田字紧密排布。其中,子走线部104a和子走线部104b走线方向相同,且呈对角设置;子走线部107a和子走线部107b走线方向相同,且呈对角设置。子走线部104a的走线方向与子走线部107a的走线方向相互垂直正交、且与子走线部107b的走线方向相互垂直正交,子走线部104b的走线方向与子走线部107a的走线方向也相互垂直正交、且与子走线部107b的走线方向相互垂直正交。
在部分实施例中,磁性部的数量为两个、且每个磁性部包括两个子磁性部;两个磁性部的四个子磁性部呈田字排列,且处于对角位置的两个子磁性部朝向走线部的磁极的极性相同。可选地,两个磁性部朝向走线部的磁极的极性相反。
具体地说,如图2所示,四个子磁性部包括:子磁性部105a、子磁性部105b、子磁性部106a和子磁性部106b。每个子磁性部朝向走线部的表面呈正方形,四个子磁性部呈田字紧密排布。其中,子磁性部105a和子磁性部105b朝向走线部的磁极的极性相同,且呈对角设置;子磁性部106a和子磁性部106b朝向走线部的磁极的极性相同,且呈对角设置。子磁性部105a朝向走线部的磁极的极性和子磁性部106a朝向走线部的磁极的极性相反,子磁性部105b朝向走线部的磁极的极性和子磁性部106b朝向走线部的磁极的极性相反,例如,若子磁性部105a朝向走线部的磁极的极性和子磁性部105b朝向走线部的磁极的极性均为N极,则子磁性部106a朝向走线部的磁极的极性和子磁性部106b朝向走线部的磁极的极性均为S极。
值得说明的是,本实施例中的磁性部可为永磁体,也可为软磁体或通电导线,均在本实施例的保护范围之内。
下面对本实施例中走线部的具体结构进行说明:
如图4所示,在部分实施例中,走线部包括平行排布的多根导线,多根导线间隔排布且相邻两根导线之间的间距相等。
本实施例中多根导线202按照周期T进行排列,任意相邻两个导线202之间存在间隔,若导线202的直径为d,则任意相邻两个导线202之间的间隔为T-d,间隔的存在可以起到相邻导线202之间的绝缘作用。此外,因为本实施例中是通过导线202的磁感应电流进行定位,因此通过调节相邻两个导线202之间的间距以调节导线202的分布密度,可以实现不同定位精度的调节,例如:相邻两个导线202之间的间距越小,定位精度越高;相邻两个导线202之间的间距越大,定位精度越低。
如图5所示,在一些实施例中,走线部上设置有绝缘层204,绝缘层204覆盖多根导线203、且填充相邻两根导线203之间的间距。
本实施例中多根导线203按照周期T进行排列,任意相邻两个导线203之间的间距被绝缘层204填充,以起到不同导线203之间的绝缘作用。本实施例中的导线203可以为微纳米级别,可通过微纳米工艺实现导线203大量加工以及不同周期T的调整,在导线203上方还可以通过覆盖绝缘材料进行保护。图5中所示的导线203为矩形条状,在实际应用中,导线203也可为圆形条状,或其他条状均在本实施例的保护范围之内。
如图6所示,在部分实施例中,走线部包括平行排布的多根导线202、且每根导线202外包覆有绝缘层,多根导线202紧邻排布。导线202相互紧邻排布,且导线202均带有绝缘层,从而阻碍感应电流在不同导线202之间的串扰。
值得说明的是,如图1、图4至图6所示,第二平台101的上方还设置有膜层102,该膜层102内可设置处理电路用于获取并处理走线部内的磁感应电流。在初始固定走线部和磁性部时,需将呈田字排布的走线部的十字中心线与呈田字排布的磁性部的十字中心线对齐,从而方便处理电路根据获取的走线部内的磁感应电流来确定第一平台和第二平台的相对位移。
与相关技术相比,本发明实施方式提供了一种感应装置,包括:第一平台103、第二平台101、设置于第一平台103的至少一个磁性部、以及设置于第二平台101的至少两个走线部;磁性部和走线部相向设置。由于各走线部的走线方向不同,因此,当第一平台103和第二平台101在不同方向上发生相对运动,带动走线部与磁性部在不同方向上相对运动时,至少有一个走线部内会产生感应电流以实现对该方向上运动的检测,因此,本实施例中的感应装置能够实现对多方向运动的检测。
本发明的第二实施方式涉及一种感应装置,第二实施方式是对第一实施方式的变形,不同之处在于,本实施例中给出了另外一种走线部的分布方式。
本实施方式的结构示意图如图7所示,走线部的数量为两个,两个走线部(701和702)层叠设置且相互绝缘。本实施例中的感应装置同样包括:第一平台103和第二平台101,在第一平台103下方设置有磁性部703,在第二平台101上方设置有走线部701和走线部702。走线部701和走线部702处于不同层中,且相互之间绝缘。
在一些实施例中,如图9所示,走线部朝向磁性部的表面呈正方形,如图8所示,磁性部703朝向走线部的表面呈正方形。
在部分实施例中,如图9所示,两个走线部的走线方向相互垂直。也就是说,走线部701和走线部702的走线方向相互垂直。
如图7所示,第二平台101的上方还设置有膜层102,该膜层102内可设置处理电路用于获取并处理走线部(701和702)内的磁感应电流。
值得说明的是,本实施例中走线部的具体结构与第一实施方式中的走线部的具体结构相同,第一实施方式中的走线部的具体结构可应用于本实施例中,本实施例中不再进行赘述。
本发明的第三实施方式涉及一种定位模组,包括:处理装置,上述任一实施方式中的感应装置。处理装置连接于感应装置中的走线部,且用于根据走线部输出的磁感应电流确定第一平台与第二平台的相对位移。
如第一实施方式图1所示,处理装置可设置于第二平台101的上方102膜层结构内。
当感应装置为第一实施方式所述的感应装置,每个子走线部包括平行排布的多根导线,每个子走线部内的多根导线并联后连接处理装置。
进一步地,如图10所示,处理装置包括:四个第一电压转换器11、第一模数转换器ADC1以及第一处理芯片MCU1;四个第一电压转换器11与四个子走线部一一对应,每个子走线部内的多根导线并联后连接一个第一电压转换器11,四个第一电压转换器11均连接至第一模数转换器ADC1,第一模数转换器ADC1连接至第一处理芯片MCU1。
具体地说,如第一实施方式中图3所示,四个子走线部104a、104b、107a和107b中,每个子走线部内所有的导线在外部会并联在一起。也就是说,子走线部1(104a)、子走线部2(104b)、子走线部3(107a)、子走线部4(107b)各自引出一条引线连接一个第一电压转换器11。当第一平台103与第二平台101发生相对位移时,子走线部内会产生磁感应电流。每个子走线部内所有的导线并联后连接至一个第一电压转换器11,该第一电压转换器11将磁感应电流转换为电压信号。四个第一电压转换器11均连接至第一模数转换器ADC1,该第一模数转换器ADC1用于将模拟电压信号转换为数字电压信号。第一模数转换器ADC1连接至第二处理芯片MCU2,由该第一处理芯片MCU1处理每个子走线部所对应的转换后的数字电压信号。
本实施例中每个第一电压转换器11包括一个分压电阻R、以及一个信号放大器AP,每个子走线部内所有的导线并联后连接一个分压电阻R产生电压信号,且每个子走线部内所有的导线并联后连接至一个信号放大器AP,电压信号经过放大后进入到第一模数转换器ADC1进行模数转换处理,最后再进入第一处理芯片MCU1进行处理。
本发明的第四实施方式涉及一种定位模组,本实施方式中的定位模组是对第三实施方式中的定位模组的变形,区别之处在于,本实施例中感应装置为第二实施方式所述的感应装置,每个子走线部包括平行排布的多根导线,且每根导线均通过独立引线连接至处理装置。
如第一实施方式图7所示,处理装置可设置于第二平台101的上方102膜层结构内。
在部分实施例中,如图11所示,处理装置包括:多个第二电压转换器12、第一多路复用器MUX2、第二模数转换器ADC2以及第二处理芯片MCU2;多个第二电压转换器12与多根所述导线一一对应,每根导线均通过独立引线连接至一个第二电压转换器12;多个第二电压转换器12均连接至第一多路复用器MUX2,第一多路复用器MUX2与第二模数转换器ADC2连接,第二模数转换器ADC2与第二处理芯片MCU2连接。
具体地说,子走线部701和子走线部702中,每个子走线部的每根导线单独连接至处理装置。当第一平台103与第二平台101的发生相对位移时,子走线部内会产生磁感应电流。多个第二电压转换器12与多根导线一一对应,每根导线对应连接至一个第二电压转换器12,该第二电压转换器12将磁感应电流转换为电压信号。多个第二电压转换器12均连接至第一多路复用器MUX2,该第一多路复用器MUX2与第二模数转换器ADC2连接,第二模数转换器ADC2与第二处理芯片MCU2连接,由该第二处理芯片MCU2处理每个子走线部的磁感应电流转换后的电压信号。
值得说明的是,如第一实施方式中附图7和9所示每个走线部的导线数目为8根,实际情况中可以根据具体需求进行增减。在实际应用中,当每个走线部的导线数目较多时,可设置两个及以上的第一多路复用器MUX2,每个走线部分别至少对应一个第一多路复用器MUX2。相应地,也可设置至两个及以上的第二模数转换器ADC2。
本实施例中每个第二电压转换器12包括一个分压电阻R、以及一个信号放大器AP,每个子走线部中的每根导线连接一个分压电阻R产生电压信号,且连接一个信号放大器APAP,电压信号经过放大后进入到第一多路复用器MUX2,经第二模数转换器ADC2模数转换,最后再进入第二处理芯片MCU2进行处理。
本发明的第五实施方式涉及一种定位方法,应用于感应装置,感应装置包括:第一平台、第二平台、设置于第一平台的两个磁性部、以及设置于第二平台的两个走线部;磁性部和走线部相向设置,各走线部的走线方向不同,两个磁性部朝向走线部的磁极的极性相反;两个走线部中每个走线部包括两个子走线部,两个走线部的四个子走线部呈田字排列,且处于对角位置的两个子走线部的走线方向相同;两个磁性部中每个磁性部包括两个子磁性部,两个磁性部的四个子磁性部呈田字排列,且处于对角位置的两个子磁性部朝向走线部的磁极的极性相同;第一平台和第二平台相对运动时带动走线部与磁性部相对运动,走线部与磁性部相对运动时,走线部产生磁感应电流。
上述感应装置为第一实施方式图1所示的感应装置,具体可参见第一实施方式中的描述,本实施方式中对其结构不进行详细说明。
本实施例中的定位方法如图12所示,包括:
步骤S11:识别产生磁感应电流的子走线部。
步骤S12:根据产生磁感应电流的子走线部和磁感应电流的方向确定移动方向。
步骤S13:根据磁感应电流的大小计算移动距离和偏移角度。
在部分实施例中,每个子走线部包括多根平行排布的导线,且任意相邻两个导线之间的间距相同;根据磁感应电流的大小确定移动距离包括:根据磁感应电流的大小确定子导线部偏移子磁性部的导线的条数;根据导线的条数以及间距确定移动距离。
步骤S14:根据移动方向、偏移角度和移动距离确定第一平台和第二平台的相对位移。
具体地说,本实施例中给出了三种旋转方式下的定位方式的示例,具体如下:
示例一:
如图13所示,当仅识别到子走线部107a和子走线部107b内产生磁感应电流时,表示第一平台和第二平台之间产生了X方向的相对运动。若子走线部107b中磁感应电流的方向为从子走线部104b朝向子走线部107b的方向,则可以确定第一平台(设置有磁性部)向X轴负半轴方向运动,第二平台(设置有走线部)向X轴正半轴方向运动。若子走线部107b中磁感应电流的方向为从子走线部107b朝向子走线部104b的方向,则可以确定第一平台(设置有磁性部)向X轴负半轴方向运动,第二平台(设置有走线部)向X轴正半轴方向运动。根据以上分析,便可结合产生磁感应电流的子走线部和磁感应电流的方向确定移动方向。
假设第一平台(设置有磁性部)向X轴负半轴方向运动,此时子走线部107a产生的磁感应电流记为I_1,它是移动后子走线部107a内所有导线的总的感应电流之和,从图中可以看到在401区域的电流占主要成分,而402区域由于对应的磁体与401区域对应的磁体的磁极的极性相反,因此402区域的电流方向与401区域的电流方向相反,子走线部107a最终的电流是401区域和402区域的电流之和。对于子走线部107b的导线来说磁场覆盖的有效条数会减少,而该区域的总电流I_2将会由于在磁场中导线的减少而减少。
忽略导线电阻的影响,磁感应电流公式I=NBLV,其中,B为导线所在磁场强度,L为导线长度,N为有效导线的条数,V为移动速度。在B已知的情况下,子走线部107a和子走线部107b两个区域的感应电流由移动速度和有效导线的条数决定,且在磁性部面积固定时,子走线部107a和子走线部107b两个区域的有效导线条数之和为固定值,因此,联立子走线部107a和子走线部107b两个区域的感应电流公式,可以求解出,子走线部107a和子走线部107b各自的有效导线的条数,从而可以计算出子导线部偏移子磁性部的导线的条数,根据导线之间的间距以及导线的条数(子导线部偏移子磁性部的导线的条数)便可确定移动距离。初始位置坐标加上移动距离以及上述确定的移动方向可以共同确定出第一平台和第二平台的相对位移。
类似地,当仅识别到子走线部104a和子走线部104b内产生磁感应电流时,表示第一平台和第二平台之间产生了Y方向的相对运动。若子走线部104b中磁感应电流的方向为从子走线部107a朝向子走线部104b的方向,则可以确定第一平台(设置有磁性部)向Y轴正半轴方向运动,第二平台(设置有走线部)向Y轴负半轴方向运动。若子走线部104b中磁感应电流的方向为从子走线部104b朝向子走线部107a的方向,则可以确定第一平台(设置有磁性部)向Y轴负半轴方向运动,第二平台(设置有走线部)向Y轴正半轴方向运动。根据以上分析,便可结合产生磁感应电流的子走线部和磁感应电流的方向确定移动方向。具体的如何确定移动距离可参考上述内容,在此就不做赘述。
示例二:
如图14所示,对于一些运动方向较为复杂的移动,也可结合上述示例一中的具体方式来确定移动方向,在此不再赘述。
假设第二平台向左上方移动时也可以进行位置的检测,此时,四个子走线部104a、104b、107a和107b都将产生感应电流,且子走线部107a的感应电流是多个感应电流之和。其中的501区域和504区域的导线具有相同的电流方向,而503区域和502区域的导线具有相同的电流方向,且与501区域和504区域的电流相反。类似地,在子走线部107a产生的电流是这四个区域的感应电流加和,记为I_1,在其它子走线部产生的感应电流分别为I_2,I_3和I_4,组成4个磁感应电流方程组,联立后可求得新的位置坐标(分别在X方向和Y方向的移动距离),且根据旧的位置坐标和新的位置坐标便可求得偏移角度θ。新的位置坐标加上偏移角度以及上述确定的移动方向可以共同确定出第一平台和第二平台的相对位移。
示例三:
如图15所示,对于一些运动方向较为复杂的移动,也可结合上述结合上述示例一中的具体方式来确定移动方向,在此不再赘述。
假设第二平台顺时针旋转了α角度,对于子走线部107a的感应电流主要由两部分组成,一部分是601区域产生的感应电流,另一部分是602区域产生的感应电流,这两部分电流由于磁场方向相反所以电流方向也相反,子走线部107a的总电流I_1是601区域和602区域的电流之和。同理在其它子走线部104b、104b和107b也是两部分相反电流之和。值得注意的是,由于旋转的对称性使得I_1=-I_2,I_3=-I_4。特别地,当四个磁体组成的阵列是正方形时,所有四个子走线部的感应电流的绝对值将相等。在旋转时角速度是一定的,在导线的不同位置速度也将不一样,因此需要使用积分的方式去建立感应电流方程,再通过解方程求出偏移角度α和移动距离。
综上所述,本实施例中的定位方法主要功能是实现第一平台或第二平台在其所在平面内各方向运动时位置的检测反馈。利用分布式的磁体以及对应的走线部,通过平台移动时带动磁体运动产生的磁场强度分布变化,进而使得走线部中感应电流的位置和强度发生改变来进行检测,不仅可以实现X和Y方向的位置平移检测,还可以实现XY平面内不同方向和面内旋转的有效测量。
本发明的第六实施方式涉及一种定位方法,应用于感应装置,感应装置包括第一平台、第二平台、设置于第一平台的至少一个磁性部、以及设置于第二平台的两个走线部,两个走线部层叠设置且相互绝缘,且每个子走线部包括多个平行排布的导线;磁性部和走线部相向设置,各走线部的走线方向不同;第一平台和第二平台相对运动时带动走线部与磁性部相对运动。
上述感应装置为第二实施方式图7所示的感应装置,具体可参见第二实施方式中的描述,本实施方式中对其结构不进行详细说明。
本实施例中的定位方法的流程示意图如图16包括:
步骤S21:获取相对运动前走线部产生的第一磁感应电流,以及相对运动后走线部产生的第二磁感应电流。
步骤S22:识别产生第一磁感应电流的导线在其所属走线部中的第一位置、以及产生第二磁感应电流的导线在其所属走线部中的第二位置,并根据第一位置和第二位置确定移动距离和移动方向。
步骤S23:根据移动距离和移动方向确定第一平台和第二平台的相对位移。
具体地,本实施例中给出了三种旋转方式下的定位方式的示例,具体如下:
示例一:
如图17所述,假设第二平台带动磁体一起向左运动。901为初始时的磁性部位置,902为结束时的磁性部位置,对应的在下方导线也会有感应电流的产生。由于第二平台仅水平向左运动,因此感应电流也仅发生在垂直导线的方向上,开始时产生的感应电流在904区域,磁性部运动到902后产生的感应电流在905区域。当上方的磁感线在运动方向中切割下方的导线就会产生感应电流,而由于磁体的大小固定,因此,随着运动方向会有新的导线产生感应电流,同时也有曾经产生感应电流导线的电流消失。对于具有固定周期的导线来说,可以通过事先内置各导线的位置,类似字线和位线,仅利用新位置导线产生了感应电流就可以实现移动距离和移动方向的计算。类似地,对于其它方向的水平运动也可以通过新产生的感应电流导线位置来进行定位,在此不再赘述。
示例二:
如图18所述,假设第二平台带动磁体向左上方运动,与水平运动类似磁体的运动会覆盖新位置的导线而产生感应电流,1001是运动前磁性部的位置,1002是运动后磁性部的位置。初始位置运动产生的感应电流在1004区域和1005区域。随着磁体向左上方运动,水平向左的方向和垂直向上的方向会有新的导线被磁场切割进而产生感应电流,运动后感应电流在1006区域和1007区域。同样地,可以通过事先内置各导线的位置,类似字线和位线,利用运动后新产生的感应电流所在导线的位置可以确定出移动距离和移动方向,从而得到平台的位置,在此不再赘述。
示例三:
如图19所述,假设第二平台从初始位置顺时针旋转了α度,其中1101是旋转前磁性部的位置,1102是旋转后磁性部的位置,对于导线来说旋转前磁体覆盖的导线区域为1104,旋转后磁体覆盖的导线区域为1105。旋转后对于垂直导线可以看到不同导线感应电流不同,对于1106a,1106b和1106c三条纵向导线的感应电流来说,1106b导线的感应电流比1106a的感应电流较大,由此可以确定向右移动。同样地,对于水平方向导线的感应电流,三条不同的横向导线1107a,1107b和1107c中1107b导线的感应电流比1107a的感应电流较大,可以确定向上移动。同样地,可以通过事先内置各导线的位置,类似字线和位线,利用运动后新产生的感应电流所在导线的位置可以确定出移动距离和移动方向,从而得到平台的位置,在此不再赘述。特别地,如果磁体为正方形时向右和向上移动距离将相等,根据角的移动位置可以计算出旋转角度。
上面各种方法的步骤划分,只是为了描述清楚,实现时可以合并为一个步骤或者对某些步骤进行拆分,分解为多个步骤,只要包括相同的逻辑关系,都在本专利的保护范围内;对算法中或者流程中添加无关紧要的修改或者引入无关紧要的设计,但不改变其算法和流程的核心设计都在该专利的保护范围内。
本领域的普通技术人员可以理解,上述各实施方式是实现本发明的具体实施例,而在实际应用中,可以在形式上和细节上对其作各种改变,而不偏离本发明的精神和范围。
- 光感应器定位模组及具有该光感应器定位模组的全屏显示终端
- 车头感应定位装置及带有车头感应定位装置的摩托车