一种起重机自动化模拟器
文献发布时间:2023-06-19 12:05:39
技术领域
本发明涉及港口自动化模拟器技术,更具体地说,涉及一种起重机自动化模拟器。
背景技术
近几年港口码头的自动化、智能化升级速度明显加快,已有多个自动化码头投入生产,随着港口自动化技术的更新换代,相应的配套培训体系并没有跟上。由于自动化系统安装在生产设备,不具备室内模拟环境,目前的系统培训还停留在看文档、听讲解、实地操作的阶段,,在系统投产后,仍然需要码头方投入大量时间对人员进行操作培训。此外,目前的培训方式僵化落后,妨碍用户吸收新技术,在实际生产中也无法发挥出系统优势。
发明内容
针对现有技术中存在的上述缺陷,本发明的目的是提供一种起重机自动化模拟器,提供一套方便、灵活的起重机自动化模拟器,能让码头用户能够快速上手,了解自动化系统的全部功能。
为实现上述目的,本发明采用如下技术方案:
一种起重机自动化模拟器,包括:
模拟器框架,其上设有门腿;
滑轨,位于所述模拟器框架的上方,并连于所述门腿的顶部;
机械平台,设于所述滑轨上,并沿所述滑轨作水平向移动,模拟起重机小车运动;
模拟吊具,连于所述机械平台的下方,并相对于所述机械平台作垂直向移动,模拟起重机起升运动;
船形扫描系统,设于所述机械平台上,用以扫描所述机械平台作水平向移动时的地面障碍物轮廓;
电气设备柜,设于所述门腿上;
控制台,用以控制所述机械平台、所述模拟吊具的移动。
较佳的,所述模拟器框架设置为矩形;
所述门腿具有4个,分别设于所述模拟器框架内侧的4个角部位置。
较佳的,所述滑轨具有2条,分别设于所述模拟器框架的2条长度向边的上方;
其中一条所述滑轨的两端部上均设有限位传感器。
较佳的,所述滑轨之间连有联系梁;
所述联系梁的内侧为堆箱区,外侧为集卡区。
较佳的,所述集卡区的所述门腿上设有集卡引导系统,以及LED引导灯。
较佳的,所述船形扫描系统包括设于所述机械平台的顶部的1台三维激光扫描仪,以及设于所述机械平台的底部的2台二维激光扫描仪。
较佳的,所述电气设备柜内安装有自动化子系统的控制器、网络设备、电源、伺服马达驱动器、PLC以及其他电气元件。
较佳的,所述控制台包括触摸屏、方向手柄、控制按钮。
较佳的,所述起重机自动化模拟器还包括集卡数字灯;
所述集卡数字灯由所述电气设备柜之间供电,并通过网络连接。
较佳的,所述起重机自动化模拟器还包括安装有操作终端软件的电脑;
所述电脑与所述电气设备柜之间通过网络连接。
本发明所提供的一种起重机自动化模拟器,按比例缩小的起重机模拟器,就能够在室内对起重机作业自动化的流程进行模拟演示,帮助用户熟悉理解自动化功能。
模拟器可以实现传统起重设备手动模式下的抓、放箱功能,还包括所述安装的集卡引导系统、船形扫描系统功能。在启用船形扫描功能后,模拟器可以对模拟吊具进行垂直方向和水平方向的自动减速防撞保护。在启用集卡引导功能后,模拟器可以将集卡区的模拟集卡引导到正确装卸位置。利用操作终端软件,模拟器还能够实现自动模式下的复杂功能,包括装卸作业时的小车路径规划、模拟集装箱在堆箱区、集卡区的自动进出箱装卸、模拟集卡的移动控制。
附图说明
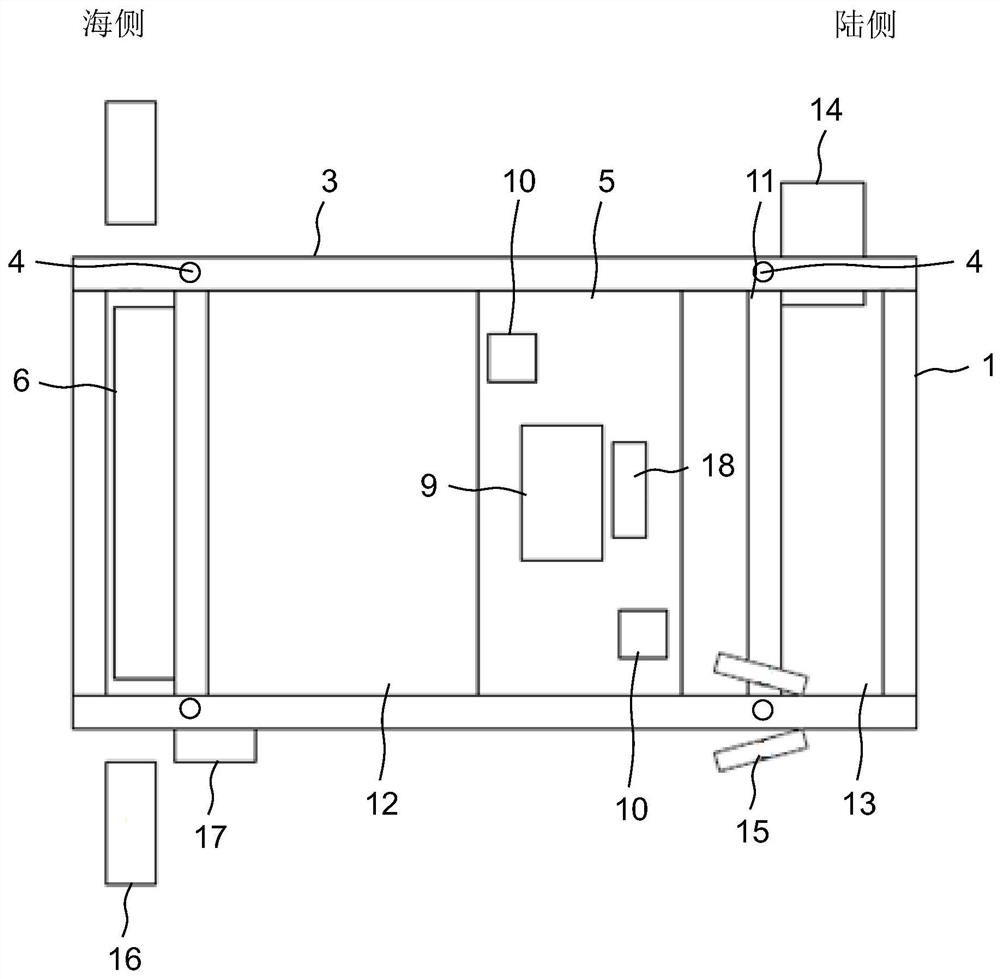
图1是本发明起重机自动化模拟器的俯视示意图;
图2是图1的仰视示意图。
具体实施方式
为了能更好地理解本发明的上述技术方案,下面结合附图和实施例进一步说明本发明的技术方案。
结合图1和图2所示,本发明所提供的一种起重机自动化模拟器,包括:
模拟器框架1,设置为矩形,其内侧的4个角部位置上均设有门腿2,每个门腿2的底部带有轮子,可以移动模拟器框架1。当需要固定本发明起重机自动化模拟器时,门腿2内部有上下伸缩的压块可以压住地面,防止本发明起重机自动化模拟器移动。
模拟器框架1的底部安装有伸缩型窗帘式排位显示幕布,可拉出、平铺在地面并固定,在幕布上划线作为集卡区13作业车道及堆箱区12各排位的位置标注。
滑轨3,具有2条,分别位于模拟器框架1的2条长度向边的上方,并连于对应门腿2的顶部。
滑轨3的两端部分别对应海侧和陆侧,在其中一条滑轨3的两端部上均设有限位传感器4(海侧限位和陆侧限位),作为机械平台5移动方向的保护。
机械平台5(模拟小车平台),设于滑轨3上(位于模拟器框架1的上方),并沿滑轨3作水平向移动,用以模拟起重机上的小车平台的水平运动。
机械平台5上设有一个起升行程限位传感器18。
电气设备柜6,设于海侧的门腿2上,内部安装有自动化子系统(船形扫描系统、集卡引导系统14)的控制器、网络设备、电源、伺服马达驱动器、PLC以及其他电气元件。
模拟吊具7,连于机械平台5的下方,机械平台5上安装有4个滑轮,滑轮上绕有钢丝绳8,钢丝绳8与模拟吊具7上的4个角部位置连接,钢丝绳8带动模拟吊具7相对于机械平台5作垂直向移动,用以模拟起重机上的吊具在起升方向的动作。
模拟吊具7的内部安装有2块电磁铁,可以吸合和释放,用以模拟起重机上的吊具的开锁和闭锁操作。闭锁时,吸住模拟集装箱;开锁时,释放模拟集装箱。
模拟吊具7的底部安装有接触开关,用以模拟实际吊具的着箱信号。
船形扫描系统,包括设于机械平台5的顶部的1台三维激光扫描仪9,以及设于机械平台5的底部的2台二维激光扫描仪10,用以实时扫描机械平台5作水平向移动时的地面障碍物轮廓。
滑轨3之间靠近陆侧位置连有联系梁11,联系梁11的内侧(海侧)为堆箱区12,外侧(陆侧)为集卡区13。堆箱区12内的模拟集装箱可以摆放多列,每列又能堆多层,模拟出实际堆场环境。集卡区13用以模拟集卡车道布置。
模拟集装箱的顶面内侧安装有铁片,供模拟吊具7的电磁铁吸合和释放。
集卡区13的门腿2上设有集卡引导系统14,以及LED引导灯15,集卡引导系统14采用三维激光扫描仪,实时扫描集卡区13内的集卡位置。LED引导灯15具有2块,用以显示集卡区13内的集卡引导信息。
本发明起重机自动化模拟器还包括2块集卡数字灯16,通过以太网通讯方式,可以显示集卡区13内的集卡车辆号码。
集卡数字灯16与电气设备柜6之间通过网络连接。
控制台17,包括触摸屏、方向手柄、控制按钮,用以在手动模式下控制机械平台5、模拟吊具7的移动,并查看和设置本发明起重机自动化模拟器的运行参数。
本发明起重机自动化模拟器还包括安装有操作终端软件的电脑,,安装有操作终端软件的电脑与电气设备柜6内交换机之间通过网络连接。可以控制本发明起重机自动化模拟器的机构动作,包括机械平台5水平向的移动、模拟吊具7垂直向的移动,控制模拟吊具7吸合和释放模拟集装箱。还能够配置本发明起重机自动化模拟器和自动化子系统的工作参数、设置堆箱区12和集卡区13的列位。实时显示模拟吊具7的位置和带箱状态、机械平台5路径下的实时地面障碍物轮廓和自动规划轨迹、通讯数据。在自动模式下,能够自动规划起升机构(机械平台5、模拟吊具7)的行进路径以避开障碍物,还能够在堆箱区12和集卡区13进行连续进出箱交换,进行流程演示。
本发明起重机自动化模拟器使用如下:
1)本发明起重机自动化模拟器可以由控制台17直接控制,也可以通过安装有操作终端软件的电脑控制,电脑需要接入模拟器网络。
2)机械平台5向海侧联动功能:选择联动模式,打住控制台17上的方向手柄,或者在操作终端软件上按住左向按钮,机械平台5会沿滑轨3一直向海侧移动,释放方向手柄或者左向按钮,机械平台5停止移动。若不释放方向手柄或者左向按钮,机械平台5沿滑轨3一直向海侧移动,直至触发海侧的限位传感器4的信号并自行停止。
3)机械平台5向陆侧联动功能:选择联动模式,打住控制台17上的方向手柄,或者在操作终端软件上按住右向按钮,机械平台5会沿滑轨3一直向陆侧移动,释放方向手柄或者右向按钮,机械平台5停止移动。若不释放方向手柄或者左向按钮,机械平台5沿滑轨3一直向陆侧移动,直至触发陆侧的限位传感器4的信号并自行停止。
4)起升向上联动功能:选择联动模式,打住控制台17上的方向手柄,或者在操作终端软件上按住向上按钮,模拟吊具7会一直向上移动,释放方向手柄或者向上按钮,模拟吊具7停止移动。若不释放方向手柄或者向上按钮,模拟吊具7会一直向上移动,直至触发起升行程限位传感器18的信号并自行停止。
5)起升向下联动功能:选择联动模式,打住控制台17上的方向手柄,或者在操作终端软件上按住向下按钮,模拟吊具7会一直向下移动,释放方向手柄或者向下按钮,模拟吊具7停止移动。若不释放方向手柄或者向下按钮,模拟吊具7会一直向下移动,直至触发起升行程限位传感器18的信号并自行停止。
6)机械平台5向海侧点动功能:选择电动模式,打住控制台17上的方向手柄,或者在操作终端软件上按住左向按钮,机械平台5会沿滑轨3向海侧移动+10mm。
7)机械平台5向陆侧点动功能:选择电动模式,打住控制台17上的方向手柄,或者在操作终端软件上按住右向按钮,机械平台5会沿滑轨3向陆侧移动-10mm。
8)起升向上点动功能:选择联动模式,打住控制台17上的方向手柄,或者在操作终端软件上按住向上按钮,模拟吊具7会向上移动+10mm。
9)起升向下点动功能:选择联动模式,打住控制台17上的方向手柄,或者在操作终端软件上按住向下按钮,模拟吊具7会向下移动-10mm。
10)开闭锁功能:在控制台17或者操作终端软件上选择闭锁按钮,模拟吊具7上的磁吸启动,可以吸住模拟集装箱;在控制台17或者操作终端软件上选择开锁按钮,模拟吊具7上的磁吸停止,可以释放模拟集装箱。
11)复位功能:在控制台17或者操作终端软件上选择复位按钮,对机械平台5和模拟吊具7起升位置进行复位。机械平台5先移动到陆侧的限位传感器4,模拟吊具7再移动到地面。
12)防撞减速功能:在船形扫描系统(SPSS)工作时,三维激光扫描仪9和二维激光扫描仪10实时扫描机械平台5行程方向上的地面高度轮廓,船形扫描系统会计算出模拟吊具7在水平方向和垂直方向上与障碍物之间的距离和速度值,控制机械平台的水平移动速度和模拟吊具的垂直移动速度。
13)集卡引导功能:模拟集卡在集卡区13的集卡车道上移动时,集卡引导系统14扫描集卡车道,集卡引导系统14(CPS)会计算出模拟集卡当前位置与标准作业位置的距离差并显示在LED引导灯15,帮助模拟集卡停靠到位。
14)集卡数字灯显示功能:可以在集卡数字灯16显示模拟集卡的车辆号码。
15)自动模式下,设定模拟吊具7的目标位置,操作终端负责自动规划路径比卡障碍物,并到达目标位置。
16)自动模式下,分别设定堆箱区12和集卡区13的目标位置,实现循环自动进出箱。首先,模拟吊具7自动提起堆箱区12目标位置的模拟集装箱,然后放置到集卡区13的模拟集卡,完成一次出箱任务;接着模拟吊具7再从模拟集卡上提起模拟集装箱,重新放回堆箱区12,完成一次进箱任务。
本技术领域中的普通技术人员应当认识到,以上的实施例仅是用来说明本发明,而并非用作为对本发明的限定,只要在本发明的实质精神范围内,对以上所述实施例的变化、变型都将落在本发明的权利要求书范围内。
- 一种起重机自动化模拟器
- 一种起重机模拟器体感模拟方法与装置