一种陀螺增稳监控云台及其控制方法
文献发布时间:2023-06-19 12:05:39
技术领域
本发明涉及视频监控技术领域,特别是涉及一种陀螺增稳监控云台及其控制方法。
背景技术
基于国家安全需要和市场需求,监控产业蓬勃发展,形成了非常成熟的产业链,并且在各个领域均有应用。随着国家安全向海洋扩展,以及应急救灾的刚需,在移动载体上部署高性能监控系统的需求也越来越多;譬如,在船只和车辆上安装云台,观察周边一两公里范围内的目标;或者在架设的高塔顶部安装云台,观察若干公里外的目标。都会遇到基座摇摆带来的画面晃动,导致无法正常观察。
目前市场上的监控产品,包括常规监控云台、高级光电球、无人机云台等,都各自存在诸多的缺陷,难以满足船舶、车辆上的高性能应用。例如,常规的监控云台虽然具有技术成熟、成本低廉、密封性好、应用广泛的优点,但是由于其采用步进电机驱动和减速器传动的原因,运动精度难以提高,即使增设了陀螺仪传感器也无法实现高精度的陀螺稳定控制。
发明内容
本发明的目的是提供一种陀螺增稳监控云台及其控制方法,以实现高精度陀螺稳定功能的目的。
为实现上述目的,本发明提供了如下方案:
一种陀螺增稳监控云台,包括:监控云台、陀螺稳定云台以及光电负载;
所述监控云台包括第一底座、设置在所述第一底座上的驱动仓、设置在所述驱动仓内部的方位步进电机、设置在所述驱动仓内部的俯仰步进电机、设置在所述驱动仓内部的步进电机驱动电路板、以及与所述俯仰步进电机的输出轴连接的光电设备仓;
所述步进电机驱动电路板分别与所述俯仰步进电机、所述方位步进电机电连接;所述陀螺稳定云台和所述光电负载均设置在所述光电设备仓的内部;
所述陀螺稳定云台包括第二底座、设置在所述第二底座上的方位轴电机、通过支撑结构与所述方位轴电机连接的俯仰轴电机、与所述俯仰轴电机的输出轴连接的光电负载、以及套设在所述俯仰轴电机输出轴上的陀螺稳定控制电路板;
所述方位轴电机上设置有方位轴角度传感器,所述俯仰轴电机上设置有俯仰轴角度传感器;所述陀螺稳定控制电路板分别与所述俯仰轴角度传感器、所述方位轴角度传感器电连接;所述陀螺稳定控制电路板分别与所述俯仰轴电机和所述方位轴电机电连接;所述陀螺稳定控制电路板与所述步进电机驱动电路板电连接。
可选的,所述陀螺稳定电路板包括单片机、六轴惯性传感器、方位轴电机驱动芯片以及俯仰轴电机驱动芯片;
其中,所述单片机通过输入模块分别与所述六轴惯性传感器、所述俯仰轴角度传感器、所述方位轴角度传感器电连接;
所述单片机通过PWM输出模块分别与所述方位轴电机驱动芯片、所述俯仰轴电机驱动芯片连接;
所述单片机通过通信接口与所述步进电机驱动电路板通信。
可选的,所述支撑结构包括方位电机转接板和俯仰电机固定支架;所述方位电机转接板和所述俯仰电机固定支架的位置关系为垂直关系。
可选的,所述光电负载与所述陀螺稳定控制电路板固联,所述陀螺稳定控制电路板与所述俯仰轴电机的定子侧固联,所述俯仰轴电机的转子侧与所述俯仰电机固定支架固联,所述俯仰电机固定支架与所述方位电机转接板固联,所述方位电机转接板与所述方位轴电机的定子侧固联,所述方位轴电机的转子侧与所述第二底座固联,所述第二底座与所述光电设备仓的内壁固联。
可选的,所述俯仰轴电机和所述方位轴电机均为无刷电机。
可选的,所述俯仰轴角度传感器和所述方位轴角度传感器均为线性霍尔元件或磁性编码器。
一种陀螺增稳监控云台的控制方法,包括:
获取外界控制台传输的监控云台旋转指令;
根据六轴惯性传感器采集的三轴角速度数据和三轴加速度数据,计算光电负载的角速度数据;
根据所述监控云台旋转指令和所述光电负载的角速度数据,运行惯性稳定反馈控制算法,驱动俯仰轴电机和方位轴电机进行旋转运动,以实现可受控旋转的惯性稳定功能;
获取俯仰轴角度传感器采集的俯仰轴偏离中立点的俯仰角度信息和方位轴角度传感器采集的方位轴偏离中立点的方位角度信息;
根据所述俯仰角度信息和所述方位角度信息,运行反馈控制算法获得步进电机的旋转控制量,通过通信接口向所述步进电机驱动电路板发送旋转控制量;所述步进电机驱动电路板用于驱动俯仰步进电机和方位步进电机进行旋转运动。
可选的,所述根据六轴惯性传感器采集的三轴角速度数据和三轴加速度数据,计算光电负载的角速度数据,具体包括:
获取六轴惯性传感器采集的三轴角速度数据和三轴加速度数据;
对所述三轴角速度数据和所述三轴加速度数据进行融合滤波和姿态解算,得到光电负载的角速度数据。
可选的,所述根据所述监控云台旋转指令和所述光电负载的角速度数据,驱动俯仰轴电机和方位轴电机进行旋转运动,具体包括:
将所述监控云台旋转指令确定为角速度反馈控制的目标量;
将所述光电负载的角速度数据确定为角速度反馈控制的反馈量;
根据所述目标量和所述反馈量,利用角速度反馈控制算法,计算俯仰轴电机的控制量和方位轴电机的控制量;
根据所述俯仰轴电机的控制量和所述方位轴电机的控制量,驱动俯仰轴电机和方位轴电机进行旋转运动。
根据本发明提供的具体实施例,本发明公开了以下技术效果:
本发明在监控云台的基础上,创造性的在监控云台的光电设备舱内增加一个小角度、高精度的陀螺稳定云台,实现小范围的光轴稳定,同时联动驱动监控云台自身的步进电机实现大范围转动。本发明提供的陀螺稳定云台不仅不会破坏监控云台的密封性能,还巧妙的解决了现有矛盾,实现了高精度的陀螺稳定功能。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
图1为本发明监控云台的外形图;
图2为本发明陀螺稳定监控云台的整体结构原理图;
图3为本发明陀螺稳定云台的结构原理图;
图4为本发明陀螺稳定监控云台的控制方法的流程示意图;
图5为本发明陀螺稳定监控云台内部控制系统的整体流程图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
针对背景技术提出的技术缺陷,以及兼顾稳定精度、防护性能以及成本等因素,本发明公开了一种陀螺增稳监控云台及其控制方法。
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
实施例一
为了让常规监控云台能在运动载体上实现高精度的陀螺稳定功能,保持光轴稳定,本实施例公开了一种陀螺增稳监控云台,即在常规监控云台的光电舱内增加了一套可以小角度范围转动的陀螺稳定云台,因该陀螺稳定云台使用无刷电机直接驱动,因此能达到很高的稳定精度。
本实施例提供的陀螺增稳监控云台主要包括:监控云台、陀螺稳定云台以及光电负载。
本实施例所述的光电负载可以为可见光监控摄像机,或者热像仪。
请参见图1,本实施例所述的监控云台为一款T字形的车载云台。该监控云台包括两个光电设备仓,在监控云台一侧的光电设备舱内增加一个微型双轴的陀螺稳定云台,并使用30倍变焦网络摄像机机芯作为光电负载。
请参见图2,本实施例所述的监控云台包括第一底座1、设置在第一底座1上的驱动仓2、设置在驱动仓2内部的方位步进电机3、设置在驱动仓2内部的俯仰步进电机4、设置在驱动仓2内部的步进电机驱动电路板5、以及与所述俯仰步进电机4的输出轴连接的光电设备仓6。
第一底座1设置有
其中,所述步进电机驱动电路板5分别与所述俯仰步进电机4、所述方位步进电机3电连接。所述俯仰步进电机4的输出轴穿过所述驱动仓2与所述光电设备仓6连接。所述陀螺稳定云台7和所述光电负载均设置在所述光电设备仓6的内部。
所述方位步进电机3的输出轴与所述驱动仓2连接,并当所述方位步进电机3工作时,能够使所述驱动仓2随着所述方位步进电机3运动进行方位旋转,同时所述驱动仓2进行方位旋转,所述俯仰步进电机4也会进行方位旋转,进而也带动了与所述俯仰步进电机4的输出轴连接的光电设备仓6进行方位旋转。此时,光电设备仓6相对于第一底座1发生方位旋转运动。
由于所述俯仰步进电机4的输出轴与所述光电设备仓6连接,故当所述俯仰步进电机4进行俯仰运动时,所述光电设备仓6也进行俯仰运动。
需要说明一点,本实施例提供的监控云台仅为示例性说明书,其内部包括步进电机、步进电机驱动板、壳体等的监控云台都可适用,不同外形的监控云台的原理结构基本相同,此处不再赘述。
请参见图3,本实施例所述的陀螺稳定云台7包括第二底座701、设置在所述第二底座701上的方位轴电机702、通过支撑结构与所述方位轴电机702连接的俯仰轴电机703、与所述俯仰轴电机703的输出轴连接的光电负载8、以及套设在所述俯仰轴电机703输出轴上的陀螺稳定控制电路板704。
其中,所述方位轴电机702上设置有方位轴角度传感器,所述俯仰轴电机703上设置有俯仰轴角度传感器。所述支撑结构包括方位电机转接板705和俯仰电机固定支架706;所述方位电机转接板705和所述俯仰电机固定支架706的位置关系为垂直关系。所述陀螺稳定控制电路板704分别与所述俯仰轴角度传感器、所述方位轴角度传感器电连接;所述陀螺稳定控制电路板704分别与所述俯仰轴电机703和所述方位轴电机702电连接;所述陀螺稳定控制电路板704与所述步进电机驱动电路板5电连接。
进一步地,本实施例所述的俯仰轴电机703和方位轴电机702均采用了无刷电机,也可以使用音圈电机、电磁舵或有限转角电机。
作为一种优选地实施方式,本实施例所述的方位电机转接板705是一块电路板,同时具有支架连接和电路转接的作用。方位电机转接板705,一方面与俯仰电机固定支架706固联形成能一个L型支架,另一方面还要焊接方位轴角度传感器,并把方位轴角度传感器的连接线连到陀螺稳定控制电路板704上。
作为一种优选地实施方式,本实施例所述的俯仰轴角度传感器安装在陀螺稳定控制电路板704与俯仰轴电机703之间,能够测量俯仰轴电机703的定子与转子之间的旋转角度。方位轴角度传感器安装在方位电机转接板705与方位轴电机702之间,能够测量方位轴电机702的定子与转子之间的旋转角度。
作为一种优选地实施方式,本实施例所述的陀螺稳定控制电路板704包括包含单片机(型号为GD32F103)、六轴惯性传感器(型号为ICM20602)、俯仰轴电机驱动芯片、方位轴电机驱动芯片和电源转换电路。
单片机的通过输入模块分别与俯仰轴角度传感器、方位轴角度传感器、六轴惯性传感器和步进电机驱动电路板5连接。单片机的通过PWM输出模块分别与俯仰轴电机驱动芯片、方位轴电机驱动芯片连接;单片机通过通信接口与步进电机驱动电路板5连接。
作为一种优选地实施方式,本实施例所述的陀螺稳定控制电路板704包含485接口,通过该485接口与步进电机驱动电路板5中的485接口连接,实现双向通信以及控制过程。
作为一种优选地实施方式,本实施例所述的光电负载8与陀螺稳定控制电路板704固联,陀螺稳定控制电路板704与俯仰轴电机703的定子侧固联,俯仰轴电机703的转子侧与俯仰电机固定支架706固联,俯仰电机固定支架706与方位电机转接板705固联,方位电机转接板705与方位轴电机702的定子侧固联,方位轴电机702的转子侧与第二底座701固联,第二底座701与光电设备仓6的内壁固联。
作为一种优选地实施方式,本实施例所述的光电负载8用于视频监控成像。陀螺稳定控制电路板704用于信号采集、控制算法和驱动输出,完成陀螺稳定的综合控制功能。俯仰轴电机703和方位轴电机702用于旋转运动的驱动,俯仰轴角度传感器和方位轴角度传感器用于检测陀螺稳定云台各轴的旋转角度,支撑结构是陀螺稳定云台机械支撑结构件。
作为一种优选地实施方式,本实施例所述的监控云台还包括:与所述俯仰步进电机4的输出轴连接的第一减速器、和与所述方位步进电机3的输出轴连接的第二减速器。
作为一种优选地实施方式,本实施例所述的第一底座1包括壳体100以及设置在所述壳体100内部的电源接口板集成模块。
其中,所述电源接口板集成模块,用于:为陀螺增稳监控云台提供独立电源;连接外部电源;对外部通信接口进行转接。
作为一种优选地实施方式,本实施例所述的俯仰轴角度传感器、方位轴角度传感器均为线性霍尔元件。
俯仰轴角度传感器包括俯仰轴角度测量磁钢707和俯仰轴线性霍尔元件;俯仰轴角度测量磁钢707粘接在俯仰轴电机703的转子侧的外壳侧壁上,可以用不同颜色或者不同纹理色表示俯仰轴角度测量磁钢707的N极和S极的方位;陀螺稳定控制电路板704与俯仰轴电机703的定子侧固联,俯仰轴线性霍尔元件安装在陀螺稳定控制电路板704且正对俯仰轴角度测量磁钢707的位置;当俯仰轴电机703发生小角度旋转的时候,俯仰轴线性霍尔元件能够输出与旋转角度相关的电压信号。由于俯仰轴线性霍尔元件与俯仰轴角度测量磁钢707正对,因此俯仰轴线性霍尔元件输出信号的中点电压(Vcc/2)就对应该俯仰轴旋转的中立点。
同理,方位轴角度传感器包括方位轴角度测量磁钢708和方位轴线性霍尔元件709;方位轴角度测量磁钢708粘接在方位轴电机702的转子侧的外壳侧壁上,可以用不同颜色或者不同纹理色表示方位轴角度测量磁钢708的N极和S极的方位;方位电机转接板705与方位轴电机702的转子侧固联,并且在方位电机转接板705且正对方位轴角度测量磁钢708的位置安装有方位轴线性霍尔元件709;当方位轴电机702发生小角度旋转的时候,方位轴线性霍尔元件709能够输出与旋转角度相关的电压信号。由于方位轴线性霍尔元件709与方位轴角度测量磁钢708正对,因此方位轴线性霍尔元件709输出信号的中点电压(Vcc/2)就对应该方位轴旋转的中立点。
此外,在第一底座701和方位电机转接板705之间还设置有方位轴限位柱710。
进一步地,俯仰轴角度传感器、方位轴角度传感器也可为磁性编码器(譬如型号TLE5012)、霍尔传感器或者电位器。
进一步地,本实施例所述的陀螺稳定云台采用了俯仰和方位两个旋转自由度,也可以增加第三个滚转轴自由度。
进一步地,当使用音圈电机、电磁舵等微型驱动元件替代无刷电机时,可以将驱动电机组装到监控机芯外侧的同一个区域,构成一个高集成度的带有陀螺稳定功能的新型机芯,并且能够完成两个轴的小角度范围的陀螺稳定控制。
进一步地,可以使用弹簧或弹片等自复位弹性元件放置在无刷电机或音圈电机旁边,使陀螺稳定云台的负载能够自动复位到中立点的位置,此时可以取消俯仰轴角度传感器和方位轴角度传感器,将陀螺稳定云台对各轴电机的控制量滤波处理后作为偏移中立点的角度观测量,用于控制步进电机的旋转,实现监控云台的同步旋转控制。
以常规的监控云台为基础,在其光电设备舱内增加一套能够小角度旋转的陀螺稳定云台,该陀螺稳定云台通过陀螺稳定控制电路板上的多轴惯性传感器感知惯性运动信息(例如角速度和加速度),经过姿态解算和反馈控制算法处理,得到各个电机(俯仰轴电机和方位轴电机)的控制量,通过陀螺稳定控制电路板驱动本陀螺稳定云台的各轴电机运转,达到监控摄像机光轴稳定的效果。
在实施陀螺增稳监控云台时,陀螺增稳监控云台的负载会在框架的中立点附近摇摆,通过角度传感器获得负载的俯仰轴偏离中立点和方位轴偏离中立点的角度数据。将各轴的中立点偏离角度数据作为外部监控云台的相应轴电机的控制量,通过数据通信接口发送到监控云台的步进电机驱动电路板,以控制俯仰步进电机、方位步进电机运转。
陀螺稳定云台在保持负载的惯性稳定时,由于存在外界的晃动,陀螺稳定云台框架各轴会发生相对转动,通过线性霍尔元件检测到相对中立点转动的偏移量,将此偏移量作为反馈量,以消除偏移量作为目标值,运行反馈控制算法获得控制量,通过云台控制协议发送给监控云台的步进电机驱动电路板。步进电机驱动电路板推动步进电机作相应运动,能够缩小陀螺稳定云台各轴的偏转角度,使之保持在中立点附近。
实施例二
本实施例提供的陀螺增稳监控云台的控制方法,其核心内容为:陀螺稳定云台在小角度范围内工作,通过角度传感器感知偏转角度,进而通过角度偏转量控制监控云台中的步进电机移实现大角度范围旋转,同时将小角度稳定陀螺稳定云台的摄像机方向保持在中立位置附近。
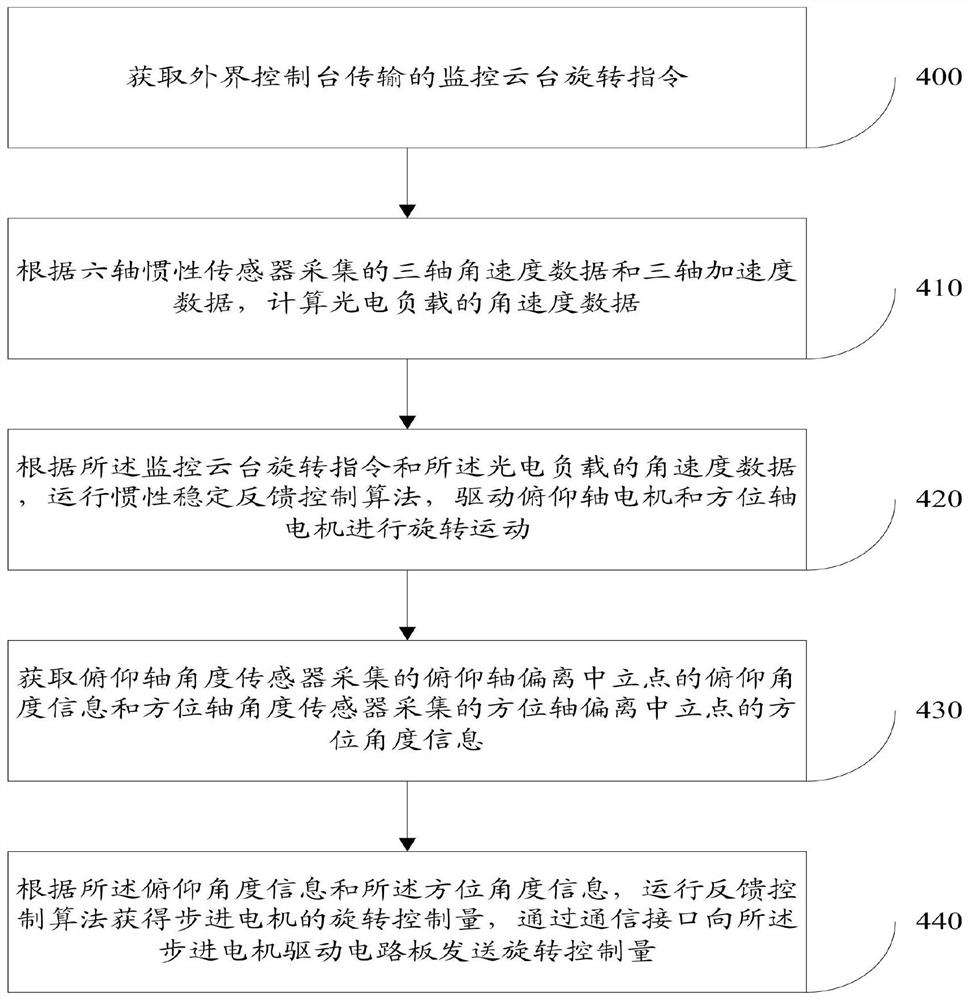
请参见图4,本实施例提供的一种陀螺增稳监控云台的控制方法,包括:
步骤400:获取外界控制台传输的监控云台旋转指令。
步骤410:根据六轴惯性传感器采集的三轴角速度数据和三轴加速度数据,计算光电负载的角速度数据。
步骤420:根据所述监控云台旋转指令和所述光电负载的角速度数据,运行惯性稳定反馈控制算法,驱动俯仰轴电机和方位轴电机进行旋转运动,以实现可受控旋转的惯性稳定功能。
步骤430:获取俯仰轴角度传感器采集的俯仰轴偏离中立点的俯仰角度信息和方位轴角度传感器采集的方位轴偏离中立点的方位角度信息。
步骤440:根据所述俯仰角度信息和所述方位角度信息,运行反馈控制算法获得步进电机的旋转控制量,通过通信接口向所述步进电机驱动电路板发送旋转控制量;所述步进电机驱动电路板用于驱动俯仰步进电机和方位步进电机进行旋转运动。
其中,步骤410具体包括:
获取六轴惯性传感器采集的三轴角速度数据和三轴加速度数据。
对所述三轴角速度数据和所述三轴加速度数据进行融合滤波和姿态解算,得到光电负载的角速度数据。
步骤420具体包括:
将所述监控云台旋转指令确定为角速度反馈控制的目标量。
将所述光电负载的角速度数据确定为角速度反馈控制的反馈量。
根据所述目标量和所述反馈量,利用角速度反馈控制算法,计算俯仰轴电机的控制量和方位轴电机的控制量。
根据所述俯仰轴电机的控制量和所述方位轴电机的控制量,驱动俯仰轴电机和方位轴电机进行旋转运动。
实施例三
本实施例提供了一种陀螺增稳监控云台的控制方法,如图5所示,具体包括:
步骤一、设计陀螺稳定云台的稳定功能:当发生摇晃时,能够保证摄像机的惯性稳定。
陀螺稳定控制功能由陀螺稳定控制电路板中的单片机程序实现,首先采集六轴惯性传感器中的三轴角速度和三轴加速度数据,然后进行融合滤波和姿态解算,并将通过通信接口获取外界控制台传输的监控云台旋转指令作为角速度反馈控制的目标量,最后利用角速度反馈控制算法计算各轴电机的控制量,通过电机驱动芯片驱动陀螺稳定云台对应的方位轴电机以及俯仰轴电机动作,从而进一步实现陀螺稳定云台中的监控摄像机的惯性稳定。
步骤二、设计陀螺稳定云台对监控云台的控制及驱动功能,代表监控云台发生外界晃动时或者当接收到外界的控制转动信号时候,陀螺稳定云台和监控云台的协作过程:
陀螺稳定云台在保持监控摄像机的惯性稳定时,由于存在外界的晃动时,云台框架各轴会发生相对转动,首先通过俯仰轴角度传感器以及方位轴角度传感器检测相对转动的角度,并将此转动量偏离中立点的角度作为作为反馈量,以消除偏移量作为目标值,接着运行反馈控制算法获得控制量,然后通过云台控制协议发送给监控云台的步进电机驱动板。最后步进电机驱动电路板接受最终的控制信号,通过相关算法以生成对应的步进电机驱动脉冲信号,进一步控制监控云台上的俯仰步进电机和方位步进电机的具体动作,缩小陀螺稳定云台各轴的偏转角度,使之保持在中立点附近。
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
- 一种陀螺增稳监控云台及其控制方法
- 一种无刷电机增稳云台控制方法及系统