车辆
文献发布时间:2023-06-19 12:05:39
本非临时申请是基于在2020年1月31日向日本专利局提交的申请号为2020-015715的日本专利申请,其全部内容通过引用合并于此。
技术领域
本公开涉及包括自动驾驶系统的车辆。
背景技术
日本专利特许公开号2018-132015公开了一包含自动驾驶系统的车辆。该车辆包含动力系统、电源系统和自动驾驶系统。动力系统以集中的方式管理车辆的动力。电源系统以集中的方式管理安装在车辆上的电池的充电和放电电力或向各种车载设备的电力供应。自动驾驶系统以集中的方式执行车辆的自动驾驶控制。动力系统的发动机ECU、电源系统的电源ECU和自动驾驶系统的自动驾驶ECU通过车载网络相互通信地连接。
由自动驾驶系统开发商开发的自动驾驶系统可以在外部附接到车辆主体。在这种情况下,自动驾驶根据来自外部附接的自动驾驶系统的指令,在车辆平台(其将在后面描述)的车辆控制下进行。
在这样的车辆中,用于在自动驾驶系统和车辆平台之间交换的各种指令和信号的接口是重要的。当外部附接的自动驾驶系统执行自动驾驶时,如何从自动驾驶系统控制车辆的电源也很重要。日本专利特许公开号2018-132015没有特别地讨论这方面。
发明内容
做出本公开以解决这种问题,并且本公开的目的是从进行自动驾驶的车辆中的自动驾驶系统控制车辆平台的电源模式。
根据本公开的车辆是其上能安装创建行驶计划的自动驾驶系统(ADS或ADK)的车辆,所述车辆包括:车辆平台(VP),其根据来自所述自动驾驶系统的指令进行车辆控制;和在所述车辆平台和所述自动驾驶系统之间提供接口的车辆控制接口盒(VCIB)。所述车辆控制接口盒从所述自动驾驶系统接收电源模式请求,所述电源模式请求是用于控制所述车辆平台的电源模式的指令。所述电源模式包括所述车辆处于Ready OFF状态的睡眠模式(Sleep),所述车辆处于Ready ON状态的驾驶模式(Driving Mode),以及所述车辆控制接口盒开启的唤醒模式(Wake)。
在所述车辆中,提供了睡眠模式、驾驶模式和唤醒模式的三种电源模式。车辆控制接口盒从自动驾驶系统接收电源模式请求,该电源模式请求是用于控制电源模式的指令。因此,根据本车辆,可以经由车辆控制接口盒从自动驾驶系统控制车辆平台的电源模式。
所述车辆平台包括高压电池和辅助电池。所述唤醒模式可以是这样一种模式:其中所述车辆控制接口盒通过从所述辅助电池馈送的电力而不通过从所述高压电池馈送的电力而开启。
根据本车辆,可以经由车辆控制接口盒从自动驾驶系统设定唤醒模式,在该唤醒模式下,车辆控制接口盒通过从辅助电池馈送的电力但不通过从高压电池馈送的电力而开启。
在从所述自动驾驶系统接收到所述电源模式请求之后的一定时间段内,所述车辆控制接口盒可以不接收下一个电源模式请求。所述一定时间段例如被设定为大约4000毫秒。
根据这样的配置,可以防止在短时间段内过度切换电源模式。
所述车辆控制接口盒可以向所述自动驾驶系统发送指示所述车辆平台的所述电源模式的状态的电源模式状态。
根据这种配置,自动驾驶系统可以识别车辆平台的电源模式的状态,并且可以根据各种模式进行适当的控制。
在根据对所述睡眠模式的请求执行了睡眠处理之后的规定时间段内,所述车辆控制接口盒可以向所述自动驾驶系统发送所述睡眠模式作为所述电源模式状态,然后关闭。所述规定时间段例如被设定为大约3000毫秒。
由于车辆控制接口盒在睡眠模式期间也关闭,因此无法通过车辆控制接口盒向自动驾驶系统通知电源模式状态。然而,根据该配置,可以通过车辆控制接口盒向自动驾驶系统通知电源模式向睡眠模式的转变。
当结合附图考虑时,根据本公开的以下详细描述,本公开的前述和其他目的、特征、方面和优点将变得更加显而易见。
附图说明
图1是示出使用根据本公开的实施例的车辆的MaaS系统的概要的图。
图2是示出图1中所示的车辆的详细配置的图。
图3是说明车辆的电源的配置的图。
图4是说明出车辆的电源模式的图。
图5是示出VCIB从ADK接收的电源模式请求命令的图。
图6是示出从VCIB向ADK输出的电源模式状态信号的图。
图7是示出根据来自ADK的电源模式请求在启动VP时由VCIB进行的处理的示例性过程的流程图。
图8是示出根据来自ADK的电源模式请求在VP被关闭时由VCIB进行的处理的示例性过程的流程图。
图9是MaaS的整体配置的图。
图10是MaaS车辆的系统配置的图。
图11是示出自动驾驶系统中的典型流程的图。
图12是示出与MaaS车辆的停止和启动有关的API的示例性时序图的图。
图13是示出与MaaS车辆的换档变更有关的API的示例性时序图的图。
图14是示出与MaaS车辆的车轮锁有关的API的示例性时序图的图。
图15是示出轮胎转弯角的变化量的极限值的图。
图16是说明加速踏板的干预的图。
图17是说明制动踏板的干预的图。
图18是MaaS的整体配置的图。
图19是车辆的系统配置的图。
图20是示出车辆的电源供给的配置的图。
图21是说明在发生故障时车辆安全地停止之前的策略的图。
图22是示出车辆的代表性功能的布置的图。
具体实施方式
下面将参考附图详细描述本公开的实施例。附图中相同或相应的元件具有被分配的相同的附图标记,并且将不重复其描述。
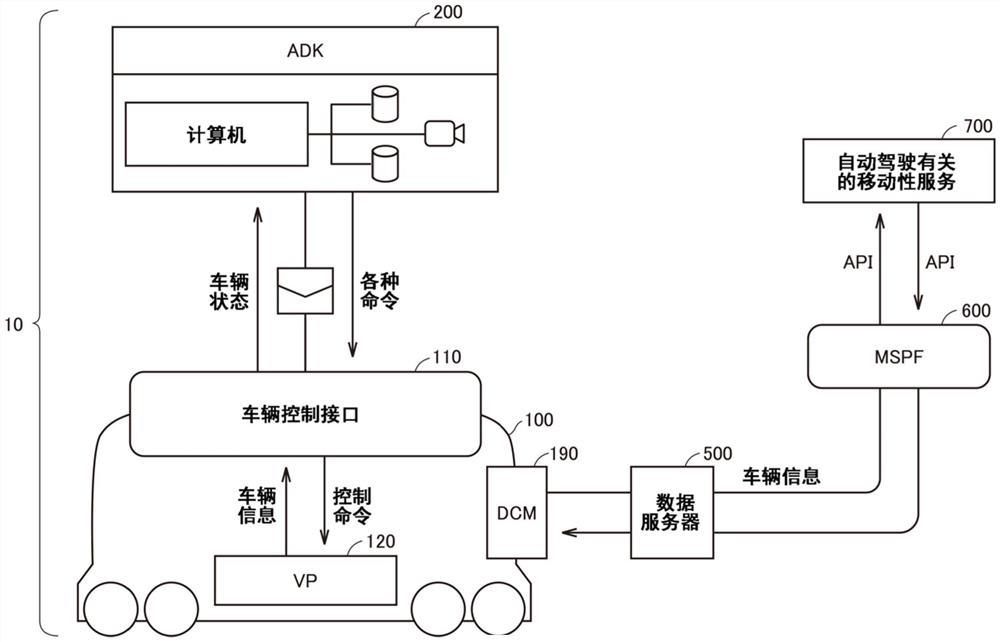
图1是示出使用根据本公开实施例的车辆的移动即服务(mobility as aservice,MaaS)系统的概要的图。
参照图1,该MaaS系统包括车辆10、数据服务器500、移动性服务平台(在下文被表示为“MSPF”)600以及与自动驾驶有关的移动性服务700。
车辆10包括车辆主体100和自动驾驶套件(在下文被表示为“ADK”)200。车辆主体100包括车辆控制接口110、车辆平台(在下文被表示为“VP”)120以及数据通信模块(DCM)190。
车辆10可以根据来自附接至车辆主体100的ADK 200的命令进行自动驾驶。尽管图1示出了车辆主体100和ADK 200在彼此远离的位置,但是ADK 200实际上附接至车辆主体100的车顶等。ADK 200也可以从车辆主体100上卸下。当未附接ADK 200时,车辆主体100可以通过使用者的驾驶而行驶。在这种情况下,VP 120以手动模式执行行驶控制(根据用户的操作的行驶控制)。
车辆控制接口110可以通过控制器局域网(CAN)与ADK 200通信。车辆控制接口110通过执行针对每个通信信号定义的规定应用程序编程接口(API),从ADK 200接收各种命令或者将车辆主体100的状态输出到ADK 200。
当车辆控制接口110从ADK 200接收到命令时,其将与接收到的命令相对应的控制命令输出到VP 120。车辆控制接口110从VP 120获得关于车辆主体100的各种类型的信息,并输出车辆主体100的状态至ADK 200。稍后将详细描述车辆控制接口110的配置。
VP 120包括用于控制车辆主体100的各种系统和各种传感器。VP 120根据经由车辆控制接口110从ADK 200给出的命令执行各种类型的车辆控制。即,由于VP 120根据来自ADK 200的命令执行各种类型的车辆控制,因此执行车辆10的自动驾驶。稍后还将详细描述VP 120的配置。
ADK 200包括用于车辆10的自动驾驶的自动驾驶系统(在下文被表示“ADS”)。ADK200创建车辆10的行驶计划,并根据为每个命令定义的API,将用于根据所创建的行驶计划使车辆10行驶的各种命令输出到车辆控制接口110。ADK 200根据为每个信号定义的API从车辆控制接口110接收指示车辆主体100的状态的各种信号,并且使接收到的车辆状态反映在行驶计划的创建中。稍后还将描述ADK 200(ADS)的配置。
DCM 190包括用于车辆主体100与数据服务器500无线通信的通信接口(I/F)。DCM190向数据服务器500输出各种类型的车辆信息,例如速度、位置或自动驾驶状态。DCM 190经由MSPF 600和数据服务器500从自动驾驶有关的移动性服务700接收各种类型的数据,用于通过移动性服务700管理包括车辆10在内的自动驾驶车辆的行驶。
MSPF 600是一个与各种移动性服务相连接的集成平台。除了自动驾驶有关的移动性服务700之外,未示出的各种移动性服务(例如,由乘车共享公司、汽车共享公司、保险公司、汽车租赁公司和出租车公司提供的各种移动性服务)也连接到MSPF 600。包括移动性服务700在内的各种移动性服务可以根据服务内容,通过使用发布在MSPF 600上的API来使用MSPF 600提供的各种功能。
自动驾驶有关的移动性服务700使用包括车辆10在内的自动驾驶车辆来提供移动性服务。移动性服务700可以通过使用在MSPF 600上发布的API,从MSPF 600获得例如与数据服务器500进行通信的车辆10的操作控制数据或存储在数据服务器500中的信息。移动性服务700通过使用API将例如用于管理包括车辆10在内的自动驾驶车辆的数据发送到MSPF600。
MSPF 600发布API以用于使用关于开发ADS所需的车辆状态和车辆控制的各种类型的数据,并且ADS提供者可以将存储在数据服务器500中的关于ADS开发所需的车辆状态和车辆控制的数据用作API。
图2是示出图1所示的车辆10的详细配置的图。参考图2,ADK 200包括计算组件210、人机界面(HMI)系统230、用于感知的传感器260、用于姿势的传感器270和传感器清洁器290。
在车辆10的自动驾驶期间,计算组件210从将在后面描述的各种传感器获得车辆周围的环境以及车辆10的姿势、举动和位置。计算组件210经由车辆控制接口110从VP 120获得车辆10的状态,并且设定车辆10的下一操作(加速、减速或转弯)。然后,计算组件210向车辆控制接口110输出用于实现车辆10的设定操作的各种命令。
HMI系统230在自动驾驶期间、在需要用户进行操作的驾驶期间或者在自动驾驶与需要用户进行操作的驾驶之间过渡时向用户呈现信息并且接受操作。HMI系统230包括例如触摸面板显示器、显示装置和操作装置。
用于感知的传感器260包括感知车辆周围的环境的传感器,并且包括例如激光成像探测和测距(LIDAR)、毫米波雷达和照相机中的至少任何一个。
LIDAR是指距离测量装置,其基于从发射脉冲激光束(例如,红外线)到被对象物反射的激光束返回之前的时间段来测量距离。毫米波雷达是一种距离测量装置,其通过向对象物发射短波长的无线电波并检测从对象物返回的无线电波来测量到对象物的距离或方向。照相机例如被布置在车厢中的室内镜子的后侧,并且用于拍摄车辆10的前方。作为由人工智能(AI)或图像处理处理器对由照相机拍摄的图像或视频图像进行图像处理的结果,可以识别出车辆10前方的另一车辆、障碍物或人。由用于感知的传感器260获得的信息输出到计算组件210。
用于姿势的传感器270包括检测车辆10的姿势、举动或位置的传感器,并且包括例如惯性测量单元(IMU)或全球定位系统(GPS)。
IMU检测例如车辆10的前后方向、横向和上下方向上的加速度以及车辆10的侧倾方向、纵倾方向和横摆方向上的角速度。GPS基于从绕地球轨道运行的多个GPS卫星接收的信息来检测车辆10的位置。由用于姿势的传感器270获得的信息输出到计算组件210。
传感器清洁器290去除附着在各种传感器上的污物。传感器清洁器290例如利用清洁溶液或擦拭器去除附着在照相机的镜头上或从其发射激光束或无线电波的部分上的污物。
车辆控制接口110包括车辆控制接口盒(其每个在下文被表示为“VCIB”)111A和111B。VCIB 111A和111B中的每一个均包括ECU,并且具体地包括中央处理单元(CPU)和存储器(只读存储器(ROM)和随机存取存储器(RAM))(均未示出)。尽管VCIB 111B在功能上等同于VCIB 111A,但在与其连接的组成VP 120的多个系统方面部分不同。
VCIB 111A和111B中的每一个通过CAN等通信地连接到ADK 200的计算组件210。VCIB 111A和VCIB 111B彼此通信连接。
VCIB 111A和111B中继来自ADK 200的各种命令,并将它们作为控制命令输出到VP120。具体地,VCIB 111A和111B通过使用诸如存储在存储器中的程序之类的信息,将根据API从ADK 200获得的各种命令转换为用于控制VP 120的每个系统的控制命令,并且将控制命令输出到目的地系统。VCIB 111A和111B中继从VP 120输出的车辆信息,并根据规定的API将车辆信息作为车辆状态输出到ADK 200。
由于提供了与至少一个系统(例如,制动或转向系统)的操作有关的功能等同的VCIB 111A和111B,所以ADK 200和VP 120之间的控制系统是冗余的。因此,当在系统的一部分中发生某种类型的故障时,可以通过在控制系统之间适当地切换或断开已发生故障的控制系统来维持VP 120的功能(转弯或停止)。
VP 120包括制动系统121A和121B、转向系统122A和122B、电子驻车制动(EPB)系统123A、P锁系统123B、推进系统124、防碰撞安全(PCS)系统125和车身系统126。
VCIB 111A通过通信总线通信地连接至VP 120中包括的多个系统中的制动系统121B、转向系统122A、EPB系统123A、P锁系统123B、推进系统124和车身系统126。
VCIB 111B通过通信总线通信地连接至VP 120中包括的多个系统中的制动系统121A、转向系统122B和P锁系统123B。
制动系统121A和121B可以控制设置在车辆10的车轮中的多个制动装置。制动系统121B可以在功能上等同于制动系统121A,或者制动系统121A和121B中的一个可以能够在车辆行驶期间能够独立地控制各车轮的制动力,而制动系统121A和121B中的另一个可以能够将制动力控制为使得在车辆行驶期间在各车轮中产生相同的制动力。制动装置包括例如盘式制动系统,该盘式制动系统利用由致动器调节的液压来操作。
车轮速度传感器127连接至制动系统121B。车轮速度传感器127设置在车辆10的每个车轮中,并且检测各车轮的转速。车轮速度传感器127将检测到的各车轮的转速输出到制动系统121B。制动系统121B将各车轮的转速输出到VCIB 111A作为车辆信息中包括的信息之一。
制动系统121A和121B各自根据经由车辆控制接口110从ADK 200接收的规定控制命令来向制动装置产生制动指令。例如,制动系统121A和121B基于在制动系统121A和121B之一中产生的制动指令来控制制动装置,并且当制动系统之一发生故障时,基于在另一个制动系统中产生的制动指令来控制制动装置。
转向系统122A和122B可以利用转向装置来控制车辆10的方向盘的转向角。转向系统122B在功能上类似于转向系统122A。转向装置包括例如允许通过致动器调节转向角的齿条小齿轮式电动助力转向(EPS)。
小齿轮角传感器128A连接至转向系统122A。与小齿轮角传感器128A分开设置的小齿轮角传感器128B连接至转向系统122B。小齿轮角传感器128A和128B中的每一个检测联接至致动器的旋转轴的小齿轮的旋转角(小齿轮角)。小齿轮角传感器128A和128B分别向转向系统122A和122B输出检测到的小齿轮角。
转向系统122A和122B分别根据经由车辆控制接口110从ADK 200接收的规定控制命令来向转向装置产生转向指令。例如,转向系统122A和122B基于在转向系统122A和122B之一中产生的转向指令来控制转向装置,并且当转向系统之一发生故障时,基于在另一个转向系统中产生的转向指令来控制转向装置。
EPB系统123A可以控制在车辆10的至少任何一个车轮中设置的EPB。EPB与制动装置分开设置,并且通过致动器的操作来固定车轮。例如,EPB激活用于设置在车辆10的至少一个车轮中的驻车制动器的鼓式制动器以固定车轮,或者利用能够与制动系统121A和121B分开地调节要供应给制动装置的液压的致动器来激活制动装置以固定车轮。
EPB系统123A根据经由车辆控制接口110从ADK 200接收的规定控制命令来控制EPB。
P锁系统123B可以控制设置在车辆10的变速器中的P锁装置。P锁装置通过将设置于停车锁止爪的尖端处的突起(其位置由致动器来调节)装配到被设置为与变速器中的旋转元件联接的齿轮(锁定齿轮)的齿中来固定变速器的输出轴的旋转。
P锁系统123B根据经由车辆控制接口110从ADK 200接收的规定控制命令来控制P锁装置。
推进系统124可以使用换档装置来切换换档档位,并且可以沿行驶方向控制由驱动源产生的车辆10的驱动力。换档装置可以选择多个换档档位中的任何一个。驱动源包括例如电动发电机和发动机。
推进系统124根据经由车辆控制接口110从ADK 200接收的规定控制命令来控制换档装置和驱动源。
PCS系统125通过使用照相机/雷达129来控制车辆10以避免碰撞或减轻损坏。PCS系统125通信地连接至制动系统121B。PCS系统125通过使用例如照相机/雷达129来检测前方的障碍物(障碍物或人),并且当基于与障碍物的距离确定存在碰撞的可能性时,其将制动指令输出至制动系统121B,以增加制动力。
车身系统126可以根据车辆10的行驶状态或环境来控制例如方向指示器、喇叭或刮水器之类的部件。车身系统126根据经由车辆控制接口110从ADK200接收的规定控制命令来控制每个部件。
可以为上述制动装置、转向装置、EPB、P锁、换档装置和驱动源单独地设置可以由用户手动进行操作的操作装置。
图3是说明车辆10的电源的配置的图。尽管图3基于图2,但其并未示出图2所示的VP 120的车轮速度传感器127、小齿轮角传感器128A和128B以及照相机/雷达129。
参照图3,除了参照图2描述的每个系统和每个传感器之外,VP 120还包括高压电池150、DC/DC转换器152、辅助电池154、开关DC/DC转换器156和二次电池158。
高压电池150包括多个(例如,数百个)单电池。每个单电池是例如二次电池,例如锂离子电池或镍金属氢化物电池。高压电池150将用于产生车辆10的驱动力的电力输出到车辆驱动系统(未示出)。高压电池150的电压例如为几百伏。代替高压电池150,可以使用诸如双电层电容器的蓄电元件。
DC/DC转换器152电连接在高压电池150和电力线PL1之间。DC/DC转换器152根据来自未示出的ECU的指令,将从高压电池150提供的电力降压转换为比高压电池150的电压低的辅助机械电压(例如,超过十伏或几十伏),并且将经降压转换的电力输出给电力线PL1。DC/DC转换器152例如由包括变压器的隔离DC/DC转换器来实现。
辅助电池154电连接至电力线PL1。辅助电池154是可充电和可放电的二次电池,并且例如由铅酸电池实现。辅助电池154可以存储从DC/DC转换器152输出到电力线PL1的电力。辅助电池154可以将存储的电力馈送到与电力线PL1电连接的各个系统。
开关DC/DC转换器156电连接在电力线PL1和电力线PL2之间。开关DC/DC转换器156根据来自ECU的指令将电力从电力线PL1提供给电力线PL2。当开关DC/DC转换器156从ECU接收到关闭指令时,其通过关闭将电力线PL2(二次电池158)与电力线PL1电断开。开关DC/DC转换器156例如由斩波器DC/DC转换器实现,该斩波器DC/DC转换器可以通过半导体开关元件在导通和断开之间切换。
二次电池158电连接至电力线PL2。二次电池158是可充电和可放电的二次电池,并且例如由锂离子二次电池实现。二次电池158可以存储从开关DC/DC转换器156输出到电力线PL2的电力。二次电池158可以将存储的电力提供给与电力线PL2电连接的各个系统。
DC/DC转换器152和辅助电池154实现VP 120的一次电源系统。制动系统121A、转向系统122A、EPB系统123A、推进系统124、PCS系统125、车身系统126和VCIB 111A电连接至电力线PL1,电力线PL1是一次电源系统的电源线,并且这些系统从一次电源系统接收电力供应。
开关DC/DC转换器156和二次电池158实现VP 120的二次电源系统。制动系统121B、转向系统122B、P锁系统123B和VCIB 111B电连接至作为二次电源系统的电源线的电力线PL2,并且这些系统从二次电源系统接收电力供应。
由开关DC/DC转换器156和二次电池158构成的二次电源系统用作由DC/DC转换器152和辅助电池154构成的一次电源系统的冗余电源。当一次电源系统的馈电功能发生故障并且无法向与电力线PL1连接的各个系统馈电时,二次电源系统至少在一定时间段内继续向与电力线PL2连接的各个系统馈电,使得VP 120的功能不会立即完全丧失。
更具体地,例如,当由于电力线PL1的电压的异常降低而检测到一次电源系统的馈电功能发生故障时,开关DC/DC转换器156关闭以将二次电池158与一次电源系统电断开,并且继续从二次电池158向与电力线PL2连接的各个系统的馈电。二次电池158的容量被设计为使得可以在开关DC/DC转换器156关闭之后的至少一定时间段内从二次电池158馈电。
如果假定在一次电源系统的馈电功能故障的情况下继续从二次电源系统(二次电池158)向所有系统馈电,则应准备大容量的二次电池158或应使从二次电池158继续馈电的时间段较短。在该实施例中,从二次电源系统(二次电池158)接收电力供应的系统限于制动系统121B、转向系统122B、P锁系统123B和VCIB 111B。因此,可以抑制二次电池158的容量,并且可以至少在一定时间段内继续向有限的系统馈电。
尽管未特别示出,但是也可以将电力从VP 120的高压电池150馈送到ADK 200(ADS),并且可以如VP 120那样,在ADK 200内配置一次电源系统和作为冗余电源的二次电源系统。
<电源模式的说明>
根据本实施例的车辆10包括三种电源模式:睡眠模式(Sleep),唤醒模式(Wake)和驾驶模式(Driving Mode),作为指示车辆10的电源状态的电源模式。
图4是说明车辆10的电源模式的图。与图4一起参照图3,睡眠模式(Sleep)是指车辆的电源关闭的状态,即,“Ready OFF”状态。在睡眠模式下,不从高压电池150向各个系统馈电,并且车辆控制接口110的VCIB 111A和111B(在下文统称为“VCIB 111”)和VP 120的各个系统没有开启。
唤醒模式(Wake)是指通过从辅助电池154馈送的电力使VCIB 111开启的状态。在唤醒模式下,不从高压电池150馈送电力,并且除了车身系统126中的一些车身有关的ECU(例如,用于验证智能钥匙的验证ECU或控制门的锁定/解锁的车身ECU)以外,除VCIB 111之外的ECU均未开启。
在唤醒模式下,VCIB 111执行诸如与ADK 200建立通信、认证ADK 200是否为已注册设备的设备认证、上述一些车身有关的ECU的开启或与这些ECU关联的API的执行等的处理。
在睡眠模式下,当VCIB 111根据规定的API从ADK 200接收到指示转变为唤醒模式的电源模式请求命令时,电源模式从睡眠模式转变为唤醒模式。
驾驶模式(Driving Mode)是指车辆的电源接通的状态,即“Ready ON”状态。在驾驶模式下,从高压电池150向各个系统馈电,并且VCIB 111和VP 120的各个系统都开启。
在唤醒模式下,当VCIB 111根据规定的API从ADK 200接收到指示转变为驾驶模式的电源模式请求命令时,电源模式从唤醒模式转变为驾驶模式。
在驾驶模式下,当VCIB 111根据规定的API从ADK 200接收到指示转变到睡眠模式的电源模式请求命令时,电源模式从驾驶模式转变为睡眠模式。
在睡眠模式下,当驾驶员握住钥匙的同时接通车辆的启动开关时,电源模式从睡眠模式转变为驾驶模式。
图5是示出由VCIB 111从ADK 200接收到的电源模式请求命令的图。参考图5,在车辆10中,当ADK 200根据规定的API向VCIB 111发送电源模式请求命令时,可以从ADK 200控制VP 120的电源模式。
电源模式请求命令可以使用值00到06中的任何一个作为参数。当没有从ADK 200发出对VP 120的电源模式的请求时(没有请求),设定值00。当VCIB 111接收到其中已经设定了值00的电源模式请求命令时,VP 120保持此时的电源模式。
当从ADK 200发出对睡眠模式(Sleep)的请求时,设定值01。当VCIB 111接收到其中已设定了值01的电源模式请求命令时,电源模式转变为睡眠模式并且VP 120被设定为Ready OFF状态。
当从ADK 200发出对唤醒模式(Wake)的请求时,设定值02。当VCIB 111接收到其中已设定了值02的电源模式请求命令时,电源模式转变为唤醒模式并且通过接收从辅助电池馈送的电力来开启VCIB 111。
当从ADK 200发出对驾驶模式(Driving Mode)的请求时,设定值06。当VCIB 111接收到其中已设定了值06的电源模式请求命令时,电源模式转变为驾驶模式并且VP 120被设定为Ready ON状态。值03至05被保留。
用于从ADK 200输入电源模式请求命令的API被配置为在其接收到特定的电源模式请求命令后的一定时间段(4000毫秒)内不接受下一个电源模式请求命令。具体地,VCIB111在其从ADK 200接收到电源模式请求命令之后的一定时间段内不接收下一个电源模式请求命令。因此,在VP 120中可以防止电源模式在短时间段内被过度地切换。
图6是示出从VCIB 111输出到ADK 200的电源模式状态信号的图。参照图6,在车辆10中,通过根据规定的API从VCIB 111向ADK 200发送指示电源模式的状态的信号来向ADK200通知VP 120的电源模式的状态。
发送到ADK 200的电源模式状态信号可以使用值00到07中的任何一个作为参数。当电源模式分别被设定为睡眠模式(Sleep)、唤醒模式(Wake)和驾驶模式(Driving Mode)时,值01、02和06被设定。当VP 120的电源中出现一些不健康情况时,值07被设定。值00和03至05被保留。
当请求切换到睡眠模式时(在来自ADK 200的电源模式请求命令中,或者通过由驾驶员进行的关闭启动开关的操作),在将VP 120设定为“Ready OFF”状态的睡眠处理之后的规定时间段(3000ms)内,VCIB 111向ADK 200输出电源模式状态信号,其中值01(睡眠模式)被设定,然后VCIB 111关闭。由于VCIB 111也在睡眠模式期间关闭,因此VCIB 111无法将电源模式状态通知给ADK 200。然而,根据以上配置,VCIB 111可以通知ADK 200电源模式转变为睡眠模式。
图7是示出当根据来自ADK 200的电源模式请求而开启VP 120时VCIB 111进行的处理的示例性过程的流程图。当VCIB 111从ADK 200接收到电源模式请求命令(其中已设定了值02(唤醒模式))时,该流程图开始。
参照图7,当VCIB 111从ADK 200接收到已经设定了值02(唤醒模式)的电源模式请求命令时,VCIB 111被开启(步骤S15)。然后,VCIB 111在电源模式状态信号中设定值02(唤醒模式),并将电源模式状态信号输出到ADK 200(步骤S20)。
然后,VCIB 111与ADK 200建立通信,并且在建立通信之后,它对ADK 200进行设备认证处理(步骤S25)。VCIB 111向一些与车身有关的ECU(验证ECU或车身ECU)输出开启指令,并开启与这些ECU相关联的API(步骤S30)。
当完成对ADK 200的设备认证时(步骤S35中为“是”),VCIB 111判断自从ADK 200接收到电源模式请求(即,VCIB 111的开启)以来是否已经过一定时间段(4000ms)(步骤S40)。
当VCIB 111判定自接收到电源模式请求以来已经过了一定时间段时(步骤S40中为“是”),VCIB 111判断其是否已经从ADK 200接收到其中已设定了值06(驾驶模式)的电源模式请求命令(步骤S45)。
当VCIB 111接收到其中已设定了值06的电源模式请求命令时(步骤S45中为“是”),VCIB 111指示VP 120进入Ready ON状态(步骤S50)。在VP 120中,DC/DC转换器152(图3)于是被启动,并且用于开启各个系统的处理被执行。
当VP 120进入Ready ON状态时(步骤S55中为“是”),VCIB 111在电源模式状态信号中设定值06(驾驶模式),并将电源模式状态信号输出至ADK 200(步骤S60)。
图8是示出当根据来自ADK 200的电源模式请求而关闭VP 120时由VCIB 111进行的处理的示例性过程的流程图。当VCIB 111从ADK 200接收到其中设定了值01(睡眠模式)的电源模式请求命令时,该流程图开始。
参照图8,当VCIB 111从ADK 200接收到其中设定了值01(睡眠模式)的电源模式请求命令时,其执行睡眠处理(步骤S115)。具体地,VCIB 111指示VP 120进入Ready OFF状态。
当VP 120进入Ready OFF状态并且睡眠处理完成时(步骤S120中为“是”),VCIB111在电源模式状态信号中设定值01(睡眠模式),并将电源模式状态信号输出至ADK 200(步骤S125)。
然后,VCIB 111判断自从向ADK 200输出其中设定了值01的电源模式状态信号以来是否已经过了规定时间段(3000ms)(步骤S130)。在此时间段期间,VCIB 111准备关闭VCIB自身。
当经过了规定时间段时(步骤S130中为“是”),VCIB 111停止与ADK 200通信并关闭(步骤S135)。
如上所述,在本实施例中,存在睡眠模式(Sleep)、驾驶模式(Driving Mode)和唤醒模式(Wake)的三种电源模式,并且VCIB 111从ADK 200接收如下的电源模式请求:其是用于控制电源模式的指令。因此,根据本实施例,ADK 200可以经由VCIB 111控制VP 120的电源模式。
在该实施例中,VCIB 111在从ADK 200接收到电源模式请求之后的一定时间段(4000ms)内不接收下一个电源模式请求。因此,可以防止电源模式在短时间段内过度切换。
在该实施例中,VCIB 111向ADK 200发送指示VP 120的电源模式的状态的电源模式状态信号。ADK 200因此可以识别VP 120的电源模式的状态并且可以根据各种模式进行适当的控制。
在该实施例中,在根据睡眠模式的请求进行睡眠处理之后的规定时间段(3000ms)内,VCIB 111向ADK 200发送其中设定了值01(睡眠模式)的电源模式状态信号,然后关闭。VCIB 111因此可以通知ADK 200电源模式转变为睡眠模式。
[示例1]
丰田的MaaS车辆平台
API规范
用于ADS开发人员
[标准版#0.1]
修订历史
表1
索引
1.概述 4
1.1.本规范的目的 4
1.2.目标车辆 4
1.3.术语的定义 4
1.4.使用注意事项 4
2.结构 5
2.1.MaaS的总体结构 5
2.2.MaaS车辆的系统结构 6
3.应用程序接口 7
3.1.使用API时的责任分担 7
3.2.API的典型用法 7
3.3.用于车辆运动控制的API 9
3.3.1.功能 9
3.3.2.输入 16
3.3.3.输出 23
3.4.用于车身控制的API 45
3.4.1.功能 45
3.4.2.输入 45
3.4.3.输出 56
3.5.用于电源控制的API 68
3.5.1.功能 68
3.5.2.输入 68
3.5.3.输出 69
3.6.用于安全的API 70
3.6.1.功能 70
3.6.2.输入 70
3.6.3.输出 70
3.7.用于安全性的API 74
3.7.1.功能 74
3.7.2.输入 74
3.7.3.输出 76
3.8.用于MaaS服务的API 80
3.8.1.功能 80
3.8.2.输入 80
3.8.3.输出 80
1.概述
1.1.本规范的目的
本文档是丰田(Toyota)车辆平台的API规范,包含应用程序接口的概述、用法和注意事项。
1.2.目标车辆
基于丰田生产的POV(私人拥有的车辆)的e-Palette,MaaS车辆
1.3.术语的定义
表2
1.4.使用注意事项
这是该文档的早期草案。
所有内容会更改。这样的更改通知用户。请注意,某些部分依然T.B.D.(待定),将来会更新。
2.结构
2.1.MaaS的总体结构
示出了具有目标车辆的MaaS的总体结构(图9)。
车辆控制技术被用作用于技术提供商的接口。
技术提供商可以接收开发自动驾驶系统所需的开放API,例如车辆状态和车辆控制。
2.2.MaaS车辆的系统结构
示出了作为前提的系统架构(图10)。
目标车辆将采用在ADS和VCIB之间的总线使用CAN的物理架构。为了实现本文档中的各个API,CAN帧和比特分配以“比特分配表”的形式显示为单独的文档。
3.应用程序接口
3.1.使用API时的责任分担
使用API时,ADS和车辆VP之间的基本责任分担如下。
[ADS]
ADS应创建行驶计划,并应向VP指示车辆控制值。
[VP]
丰田VP应基于ADS的指示控制VP的各个系统。
3.2.API的典型用法
在本节中,将描述API的典型用法。
CAN将被用作ADS和VP之间的通信线路。因此,基本上,应该通过ADS在各个API的每个定义的循环时间执行API。
执行API时ADS的典型工作流程如下(图11)。
3.3.用于车辆运动控制的API
在本节中,描述可在MaaS车辆中控制的用于车辆运动控制的API。
3.3.1.功能
3.3.1.1.静止,启动顺序
描述向静止(固定)模式的转变和车辆启动顺序。该功能假设车辆处于Autonomy_State=自主模式。该请求在其他模式下被拒绝。
下图显示了一个示例。
加速命令请求减速并停止车辆。然后,当前后方向_速度(Longitudinal_Velocity)确认为0[km/h]时,发送静止命令=“应用”。在制动保持控制完成后,静止状态变为“应用”。在此之前,加速命令必须继续减速请求。停止命令=“应用”或加速命令的减速请求被取消,将不会发生向制动保持控制的转变。此后,车辆将继续保持静止,直到发送了静止命令=“应用”。在此时间段期间,可以将“加速命令”设定为0(零)。
如果车辆需要启动,则通过将“静止命令”设定为“释放”来取消制动保持控制。同时,基于加速命令控制加速/减速(图12)。
当静止状态=“应用”持续3分钟时,EPB接合。
3.3.1.2.方向请求顺序
描述了换档变更顺序。该功能的前提是Autonomy_State=自主模式。否则,该请求将被拒绝。
换档变更仅在Actual_Moving_Direction=“静止”期间发生。否则,该请求将被拒绝。
下图显示了一个示例。加速命令请求减速并使车辆停止。在Actual_Moving_Direction设定为“静止”后,推进方向命令可以请求任何换档位置。(在下面的示例中,“D”→“R”)。
在换档变更期间,加速命令必须请求减速。
换档变更后,基于加速命令值控制加速/减速(图13)。
3.3.1.3.车轮锁顺序
描述车轮锁的接合和释放。该功能的前提是Autonomy_State=自主模式,否则请求将被拒绝。
此功能仅在车辆停止期间才可执行。加速命令请求减速并使车辆停止。在将Actual_Moving_Direction设定为“静止”后,通过固定命令=“应用”而使车轮锁接合。“加速命令”设定为“减速”,直到“固定状态”设定为“应用”。
如果需要释放,则在车辆静止时请求“固定命令”=“释放”。此时,“加速命令”设定为“减速”。
之后,基于加速命令值使车辆加速/减速(图14)。
3.3.1.4.Road_Wheel_Angle请求
该功能的前提是Autonomy_State=“自主模式”,否则将拒绝该请求。
轮胎转弯角命令是来自Estimated_Road_Wheel_Angle_Actual的相对值。
例如,当车辆直行时,Estimated_Road_Wheel_Angle_Actual=0.1[rad]时;
如果ADS请求向前直行,则轮胎转弯角命令应设定为0+0.1=0.1[rad]。
如果ADS请求转向-0.3[rad],则轮胎转弯角命令应设定为-0.3+0.1=-0.2[rad]。
3.3.1.5.乘客操作
3.3.1.5.1.加速踏板操作
在自动驾驶模式下,从车辆加速需求选择中消除加速踏板行程。
3.3.1.5.2.制动踏板操作
操作制动踏板时的动作。在自主模式下,目标车辆减速度是1)根据制动踏板行程估计的减速度与2)来自AD系统的减速度请求之和。
3.3.1.5.3.换档杆操作
在自动驾驶模式下,换档杆的驾驶员操作不会反映在推进方向状态中。
如有必要,ADS会通过驾驶员确认推进方向,并使用推进方向命令更改换档位置。
3.3.1.5.4.转向操作
当驾驶员(乘客)操作转向时,从以下选项中选择最大值:
1)从驾驶员操作角度估算的转矩值;以及
2)从请求的车轮角度计算出的转矩值。
请注意,如果驾驶员强烈转动方向盘,则不接受轮胎转弯角命令。以上内容由Steering_Wheel_Intervention(方向盘干预)标志确定。
3.3.2.输入
表3
3.3.2.1.Propulsion Direction Command(推进方向命令)
请求在向前(D档)和向后(R档)之间切换
值
表4
备注
·仅在Autonomy_State=“自主模式”时可用
·D/R仅在车辆静止时才可改变(Actual_Moving_Direction=“静止”)。
·在行驶(移动)时的请求被拒绝。
·当系统请求D/R换档时,发送加速命令,同时减速(-0.4m/s
·在以下情况下,请求可能不被接受。
·Direction_Control_Degradation_Modes=“检测到故障”
3.3.2.2.Immobilization Command(固定命令)
请求接合/释放车轮锁
值
表5
备注
·仅在Autonomy_State=“自主模式”时可用
·仅在车辆静止时才可改变(Actual_Moving_Direction=“静止”)
·车辆行驶时该请求被拒绝。
·当请求更改应用/释放模式时,“加速命令”设定为减速(-0.4m/s
(仅在施加制动时。)
3.3.2.3.Standstill Command(静止命令)
请求车辆静止
值
表6
备注
·仅在Autonomy_State=“自主模式”时可用
·通过静止状态=“应用”来确认
·当车辆静止时(Actual_Moving_Direction=“静止”),启用到静止的转变。
·必须继续执行加速命令,直到“静止状态”变为“应用”,并且应继续执行加速命令的减速请求(-0.4m/s
·存在请求不被接受的更多情况。详情为T.B.D。
3.3.2.4.Acceleration Command(加速命令)
命令车辆加速
值
Estimated_Max_Decel_Capabilit至Estimated_Max_Accel_Capability[m/s
备注
·仅在Autonomy_State=“自主模式”时可用
·基于推进方向状态方向的加速(+)减速(-)请求
·上限/下限将基于Estimated_Max_Decel_Capability和Estimated_Max_Accel_Capability而有所不同。
·当请求大于Estimated_Max_Accel_Capability的加速度时,该请求被设定为Estimated_Max_Accel_Capability。
·当请求大于Estimated_Max_Decel_Capability的减速度时,该请求被设定为Estimated_Max_Decel_Capability。
·取决于加速/制动踏板的行程,可能无法达到请求的加速度。有关更多详细信息,请参见3.4.1.4。
·当同时激活防碰撞系统时,将选择最小加速度(最大减速度)。
3.3.2.5.Tire Turning Angle Command(轮胎转弯角命令)
命令轮胎转弯角度
值
表7
备注
·左为正值(+)。右为负值(-)。
·仅在Autonomy_State=“自主模式”时可用
·车辆直行时的Estimated_Road_Wheel_Angle_Actual的输出设定为参考值(0)。
·这请求Estimated_Road_Wheel_Angle_Actual的相对值。(有关详细信息,请参见3.4.1.1)
·请求的值在Current_Road_Wheel_Angle_Rate_Limit之内。
·取决于驾驶员的转向角,可能无法满足请求的值。
3.3.2.6.Autonomization Command(自主化命令)
请求在手动模式和自主模式之间转变
值
表8
·该模式可能无法转变为自主模式。(例如,如果在车辆平台中发生故障。)
3.3.3.输出
表9
3.3.3.1.Propulsion Direction Status(推进方向状态)
当前换档档位
值
表10
备注
·当换档档位不确定时,此输出将设定为“无效值”。
·当在VO模式下车辆进入以下状态时,[推进方向状态]将变为“P”。
-[Longitudinal_Velocity]=0[km/h]
-[Brake_Pedal_Position]<阈值(T.B.D.)(在确定未踩下踏板的情况下)
-[1st_Left_Seat_Belt_Status]=已解开
-[1st_Left_Door_Open_Status]=已打开
3.3.3.2.Propulsion Direction by Driver(驾驶员的推进方向)
驾驶员操作的换档杆位置
值
表11
备注
·基于驾驶员的杆位置的输出
·如果驾驶员松开他在换档杆上的手,换档杆将返回中间位置,并且输出将设定为“无请求”。
·当车辆在NVO模式下变为以下状态时,[驾驶员的推进方向]将变为“1(P)”。
-[Longitudinal_Velocity]=0[km/h]
-[Brake_Pedal_Position]<阈值(T.B.D.)(在确定未踩下踏板的情况下)
-[1st_Left_Seat_Belt_Status]=已解开
-[1st_Left_Door_Open_Status]=已打开
3.3.3.3.Immobilization Status(固定状态)
输出EPB和档位-P状态
值
<主要>
表12
<次要>
表13
备注
·次要信号不包括EPB锁定状态。
3.3.3.4.Immobilization Request by Driver(驾驶员的固定请求)
EPB开关的驾驶员操作
值
表14
备注
·按下EPB开关时,输出“接合”。
·拔下EPB开关时,输出“释放”。
3.3.3.5.Standstill Status(静止状态)
车辆静止状态
值
表15
备注
·当静止状态=应用持续了3分钟时,EPB被激活。
·如果想要启动车辆,则ADS请求“静止命令”=“释放”。
3.3.3.6.Estimated_Coasting_Rate
当节气门关闭时的估计车辆减速度
值
[单位:m/s
备注
·计算WOT时的估计加速度。
·将坡度和道路负荷等考虑进估计中。
·当推进方向状态为“D”时,向前方向的加速度为正值。
·当推进方向状态为“R”时,向后方向的加速度为正值。
3.3.3.7.Estimated_Max_Accel_Capability
估计的最大加速度
值
[单位:m/s
备注
·计算WOT时的加速度。
·将坡度和道路负荷等考虑进估计中。
·由换档位置确定的方向被视为正。
3.3.3.8.Estimated_Max_Decel_Capability
估计的最大减速度
值
-9.8至0[单位:m/s
备注
·受Brake_System_Degradation_Modes影响。详情待定。
·根据车辆状态或路况,有时无法输出
3.3.3.9.Estimated_Road_Wheel_Angle_Actual
前车轮转向角
值
表16
备注
·左为正值(+)。右为负值(-)。
·在“车辆直行时的转向轮转向角”变为可用之前,此信号为无效值。
3.3.3.10.Estimated_Road_Wheel_Angle_Rate_Actual
前车轮转向角速率
值
表17
备注
·左为正值(+)。右为负值(-)。
3.3.3.11.Steering_Wheel_Angle_Actual
方向盘转角
值
表18
备注
·左为正值(+)。右为负值(-)。
·从转向助力电机角度换算的转向角
·在“车辆直行时的转向轮转向角”变为可用之前,此信号为无效值。
3.3.3.12.Steering_Wheel_Angle_Rate_Actual
方向盘转角速率
值
表19
备注
·左为正值(+)。右为负值(-)。
·从转向助力电机角速率换算的转向角速率
3.3.3.13.Current_Road_Wheel_Angle_Rate_Limit
车轮角速率限制
值
·停止时:0.4[rad/s]
·运行时:显示“备注”
备注
从下图“车速-转向角速率”表计算得出
A)在非常低的车速或停止的情况下,使用0.4[rad/s]的固定值
B)在较高车速下,转向角速率是根据车速使用2.94m/s
3.3.3.14.Estimated_Max_Lateral_Acceleration_Capability
估计的最大横向加速度
值
2.94[单位:m/s
备注
·转向轮转向角控制器被设计在最高达2.94m/s
3.3.3.15.Estimated_Max_Lateral_Acceleration_Rate_Capability
估计的最大横向加速度速率
值
2.94[单位:m/s
备注
·转向轮转向角控制器被设计在最高达2.94m/s
3.3.3.16.Accelerator_Pedal_Position
加速踏板的位置(踏板被踩下多少?)
值
0至100[单位:%]
备注
·为了不突然改变加速度开度,通过平滑处理对该信号进行滤波。
·在正常状态下
零点校准后的加速器位置信号被发送。
·在故障状态下
传输的故障安全值(0×FF)
3.3.3.17.Accelerator_Pedal_Intervention
该信号表示驾驶员是否踩下了加速踏板(干预)。
值
表20
备注
·当Accelerator_Pedal_Position高于定义的阈值(ACCL_INTV)时,此信号[Accelerator_Pedal_Intervention]将变为“踩下”。
当根据踩下的加速踏板的请求加速度高于来自系统(ADS,PCS等)的请求加速度时,该信号将变为“超过自主加速度”。
·在NVO模式下,加速器请求将被拒绝。因此,该信号将不会变为“2”。
详细设计(图16)
3.3.3.18.Brake_Pedal_Position
制动踏板的位置(踏板被踩下多少?)
值
0至100[单位:%]
备注
·在制动踏板位置传感器故障时:
传输的故障安全值(0×FF)
·由于组装错误,该值可能会超过100%。
3.3.3.19.Brake_Pedal_Intervention
该信号表示驾驶员是否踩下了制动踏板(干预)。
值
表21
备注
·当Brake_Pedal_Position高于定义的阈值(BRK_INTV)时,此信号[Brake_Pedal_Intervention]将变为“踩下”。
·当根据踩下制动踏板的请求减速度高于来自系统(ADS,PCS等)的请求减速度时,此信号将变为“超过自主减速度”。
详细设计(图17)
3.3.3.20.Steering_Wheel_Intervention
该信号表示方向盘是否由驾驶员转动(干预)。
值
表22
备注
·在“Steering_Wheel_Intervention=1”时,考虑人类驾驶员的意图,EPS系统将与人类驾驶员协同地驱动转向。
·在“Steering_Wheel_Intervention=2”中,考虑人类驾驶员的意图,EPS系统将拒绝自动驾驶套件的转向要求。(转向将由人类驾驶员来驱动。)
3.3.3.21.Shift_Lever_Intervention
该信号表示换档杆是否由驾驶员控制(干预)。
值
表23
备注
·N/A
3.3.3.22.WheelSpeed_FL,WheelSpeed_FR,WheelSpeed_RL,WheelSpeed_RR
车轮速度值
值
表24
备注
·待定。
3.3.3.23.WheelSpeed_FL_Rotation,WheelSpeed_FR_Rotation,WheelSpeed_RL_Rotation,WheelSpeed_RR_Rotation
各车轮的旋转方向
值
表25
备注
·激活ECU后,直到旋转方向固定为止,此信号才设定为“向前”。
·当连续检测到2个(两个)相同方向的脉冲时,旋转方向将被固定。
3.3.3.24.Actual_Moving_Direction
车轮的旋转方向
值
表26
备注
·在恒定时间内当四个车轮速度值为“0”时,此信号表示“静止”。
·除上述以外时,此信号将由四个WheelSpeed_Rotations的多数规则确定。
·当多于两个的WheelSpeed_Rotations为“向后”时,此信号表示“向后”。
·当多于两个的WheelSpeed_Rotations为“向前”时,此信号表示“向前”。
·当“向前”和“向后”计数值相同时,此信号表示“未定义”。
3.3.3.25.Longitudinal_Velocity
估计的车辆前后方向速度
值
表27
备注
·该信号作为绝对值输出。
3.3.3.26.Longitudinal_Acceleration
估计的车辆前后方向加速度
值
表28
备注
·该信号将通过车轮速度传感器和加速度传感器计算得出。
·当车辆在平坦道路上以恒定速度被驱动时,此信号表示“0”。
3.3.3.27.Lateral_Acceleration
车辆的横向加速度的传感器值
值
表29
备注
·正值表示逆时针方向。负值表示顺时针方向。
3.3.3.28.横摆率
横摆率的传感器值
值
表30
备注
·正值表示逆时针方向。负值表示顺时针方向。
3.3.3.29.Autonomy_State
自主模式还是手动模式的状态
值
表31
备注
·初始状态是手动模式。(当Ready ON时,车辆将从手动模式启动。)
3.3.3.30.Autonomy_Ready
车辆是否可以转变为自主模式的情况
值
表32
备注
·此信号是向自主模式转变条件的一部分。
请参阅条件摘要。
3.3.3.31.Autonomy_Fault
自主模式下的功能方面的故障是否发生的状态
值
表33
备注
·[T.B.D.]请参阅关于自主模式下功能的故障代码的其他资料。
·[T.B.D.]需要考虑释放“故障”的状态的条件。
3.4.用于车身控制的API
3.4.1.功能
T.B.D.
3.4.2.输入
表34
3.4.2.1.Turnsignallight_Mode_Command
控制车辆平台的转向信号灯模式的命令
值
表35
备注
T.B.D.
详细设计
当Turnsignallight_Mode_Command=1时,车辆平台发送左转向信号指示灯开启请求。
当Turnsignallight_Mode_Command=2时,车辆平台发送右转向信号指示灯开启请求。
3.4.2.2.Headlight_Mode_Command
控制车辆平台的前照灯模式的命令
值
表36
备注
·当Headlight_Driver_Input=关闭或自动(AUTO)模式开启时,此命令有效。
·驾驶员输入将覆盖此命令。
·当车辆平台收到此命令一次后,前照灯模式改变。
3.4.2.3.Hazardlight_Mode_Command
控制车辆平台的危险灯模式的命令
值
表37
备注
·驾驶员输入将覆盖此命令。
·在车辆平台收到开启命令期间,危险灯处于工作状态。
3.4.2.4.Horn_Pattern_Command
控制车辆平台每个周期的喇叭开启时间和关闭时间的方案的命令
值
表38
备注
·假设方案1使用单个短开启,方案2假设使用开-关重复。
·详细内容正在内部讨论中。
3.4.2.5.Horn_Number_of_Cycle_Command
控制车辆平台的喇叭开/关次数的命令
值
0~7[-]
备注
·详细内容正在内部讨论中。
3.4.2.6.Horn_Continuous_Command
控制车辆平台的喇叭开启的命令
值
表39
备注
·此命令将覆盖Horn_Pattern_Command,Horn_Number_of_Cycle_Command。
·在车辆平台接收到开启命令期间,喇叭处于工作状态。
·详细内容正在内部讨论中。
3.4.2.7.Windshieldwiper_Mode_Front_Command
控制车辆平台的前挡风玻璃刮水器的命令
值
表40
备注
·正在内部讨论此命令的有效时间。
·当Windshieldwiper_Front_Driver_Input=关闭或自主模式开启时,此命令有效。
·驾驶员输入将覆盖此命令。
·在车辆平台接收命令期间,保持挡风玻璃刮水器模式。
3.4.2.8.Windshieldwiper_intermittent_Wiping_Speed_Command
控制在间歇模式下挡风玻璃刮水器致动间隔的命令
值
表41
备注
·当Windshieldwiper_Mode_Front_Status=INT时,此命令有效。
·驾驶员输入将覆盖此命令。
·一旦车辆平台收到此命令,挡风玻璃刮水器间歇模式就会改变。
3.4.2.9.Windshieldwiper_Mode_Rear_Command
控制车辆平台的后挡风玻璃刮水器模式的命令
值
表42
备注
·驾驶员输入将覆盖此命令。
·在车辆平台接收该命令期间,保持挡风玻璃刮水器模式。
·间歇模式的擦拭速度不变。
3.4.2.10.Hvac_1st_Command
启动/停止第一排空调控制的命令
值
表43
备注
·S-AM的hvac(采暖通风与空调)具有同步功能。
因此,为了单独控制4(四个)hvac(第1个左/右,第2个左/右),VCIB在Ready-ON之后实现以下过程。(此功能将从CV实现。)
#1:Hvac_1st_Command=ON
#2:Hvac_2nd_Command=ON
#3:Hvac_TargetTemperature_2nd_Left_Command
#4:Hvac_TargetTemperature_2nd_Right_Command
#5:Hvac_Fan_Level_2nd_Row_Command
#6:Hvac_2nd_Row_AirOutlet_Mode_Command
#7:Hvac_TargetTemperature_1st_Left_Command
#8:Hvac_TargetTemperature_1st_Right_Command
#9:Hvac_Fan_Level_1st_Row_Command
#10:Hvac_1st_Row_AirOutlet_Mode_Command
*每个命令之间的间隔需要200ms或更长时间。
*#1之后可以执行其他命令。
3.4.2.11.Hvac_2nd_Command
启动/停止第二排空调控制的命令
值
表44
备注
·N/A
3.4.2.12.Hvac_TargetTemperature_1st_Left_Command
设定左前区域附近的目标温度的命令
值
表45
备注
·N/A
3.4.2.13.Hvac_TargetTemperature_1st_Right_Command
设定右前区域附近的目标温度的命令
值
表46
备注
·N/A
3.4.2.14.Hvac_TargetTemperature_2nd_Left_Command
设定左后区域附近的目标温度的命令
值
表47
备注
·N/A
3.4.2.15.Hvac_TargetTemperature_2nd_Right_Command
设定右后区域附近的目标温度的命令
值
表48
备注
·N/A
3.4.2.16.Hvac_Fan_Level_1st_Row_Command
设定前AC上的风扇级别的命令
值
表49
备注
·如果想要将风扇级别设定为0(关闭),则应发送“Hvac_1st_Command=关闭”。
·如果想要将风扇级别设为自动(AUTO),则应发送“Hvac_1st_Command=开启”。
3.4.2.17.Hvac_Fan_Level_2nd_Row_Command
设定后AC上的风扇级别的命令
值
表50
备注
·如果想要将风扇级别设为0(关闭),则应发送“Hvac_2nd_Command=关闭”。
·如果想要将风扇级别设为自动(AUTO),则应发送“Hvac_2nd_Command=开启”。
3.4.2.18.Hvac_1st_Row_AirOutlet_Mode_Command
设定第一排出风口的模式的命令
值
表51
备注
·N/A
3.4.2.19.Hvac_2nd_Row_AirOutlet_Mode_Command设定第二排出风口的模式的命令
值
表52
备注
·N/A
3.4.2.20.Hvac_Recirculate_Command
设定空气再循环模式的命令
值
表53
备注
·N/A
3.4.2.21.Hvac_AC_Command
设定AC模式的命令
值
表54
备注
·N/A
3.4.3.输出
表55
3.4.3.1.Turnsignallight_Mode_Status
车辆平台的当前转向信号灯模式的状态
值
表56
备注
·在检测到转向灯断开时,状态为开启。
·在短暂检测到转向灯时,状态为关闭。
3.4.3.2.Headlight_Mode_Status
车辆平台的当前前照灯模式的状态
值
表57
备注
N/A
详细设计
·在尾灯信号打开时,车辆平台发送1。
·在Lo信号打开时,车辆平台发送2。
·在Hi信号打开时,车辆平台发送4。
·在以上任何信号为OFF时,车辆平台发送0。
3.4.3.3.Hazardlight_Mode_Status
车辆平台的当前危险灯模式的状态
值
表58
备注
N/A
3.4.3.4.Horn_Status
车辆平台的当前喇叭的状态
值
表59
备注
·无法检测到任何故障。
·如果喇叭关闭,则在喇叭方案命令激活时,车辆平台发送“1”。
3.4.3.5.Windshieldwiper_Mode_Front_Status
车辆平台的当前前挡风玻璃刮水器模式的状态
值
表60
表61
备注
故障模式条件
·检测信号不连续
·除上述故障外无法检测。
3.4.3.6.Windshieldwiper_Mode_Rear_Status
车辆平台的当前后挡风玻璃刮水器模式的状态
值
表62
备注
·无法检测任何故障。
3.4.3.7.Hvac_1st_Status
第一排HVAC的激活状态
值
表63
备注
N/A
3.4.3.8.Hvac_2nd_Status
第二排HVAC的激活状态
值
表64
备注
N/A
3.4.3.9.Hvac_Temperature_1st_Left_Status
第一排左边的设定温度的状态
值
表65
备注
N/A
3.4.3.10.Hvac_Temperature_1st_Right_Status
第一排右边的设定温度的状态
值
表66
备注
N/A
3.4.3.11.Hvac_Temperature_2nd_Left_Status
第二排左边的设定温度的状态
值
表67
备注
N/A
3.4.3.12.Hvac_Temperature_2nd_Right_Status
第二排右边的设定温度的状态
值
表68
备注
N/A
3.4.3.13.Hvac_Fan_Level_1st_Row_Status
第一排设定风扇级别的状态
值
表69
备注
N/A
3.4.3.14.Hvac_Fan_Level_2nd_Row_Status
第二排设定风扇级别的状态
值
表70
备注
N/A
3.4.3.15.Hvac_1st_Row_AirOutlet_Mode_Status
第一排出风口模式的状态
值
表71
备注
N/A
3.4.3.16.Hvac_2nd_Row_AirOutlet_Mode_Status
第二排出风口模式的状态
值
表72
备注
N/A
3.4.3.17.Hvac_Recirculate_Status
设定的空气再循环模式的状态
值
表73
备注
N/A
3.4.3.18.Hvac_AC_Status
设定的AC模式的状态
值
表74
备注
N/A
3.4.3.19.1st_Right_Seat_Occupancy_Status
左第1个座位的座位占用状态
值
表75
备注
当座位上有行李时,此信号可以设定为“占用”。
3.4.3.20.1st_Left_Seat_Belt_Status
驾驶员座椅安全带带扣开关的状态
值
表76
备注
·当未设定驾驶员座椅安全带带扣开关状态信号时,发送[未定]。
使用时它正在检查负责人。(输出“未定=10”作为初始值。)
·扣紧/解开的判断结果应在IG_ON之后或允许点火之前的1.3秒内传送到CAN发送缓冲区,以较早者为准。
3.4.3.21.1st_Right_Seat_Belt_Status
乘客座椅安全带带扣开关的状态
值
表77
备注
·如果未设定乘客座椅安全带带扣开关状态信号,则发送[未定]。
使用时它正在检查负责人。(输出“未定=10”作为初始值。)
·扣紧/解开的判断结果应在IG_ON之后或允许点火之前的1.3秒内传送到CAN发送缓冲区,以较早者为准。
3.4.3.22.2nd_Left_Seat_Belt_Status
左第二个座位的座椅安全带带扣开关状态
值
表78
备注
·无法检测传感器故障。
3.4.3.23.2nd_Right_Seat_Belt_Status
右第二个座位的座椅安全带带扣开关状态
值
表79
备注
·无法检测任何故障。
3.5.用于电源控制的API
3.5.1.功能
T.B.D.
3.5.2.输入
表80
3.5.2.1.Power_Mode_Request
控制车辆平台的电源模式的命令
值
表81
备注
·关于“唤醒”,让我们分享如何在CAN上实现此信号。(请参阅其他材料)基本上,它基于“ISO11989-2:2016”。同样,该信号也不应该是一个简单的值。无论如何,请参阅其他材料。
·此API将在收到请求后的一定时间[4000ms]内拒绝下一个请求。
以下是可经由API控制的三种电源模式的解释,即[睡眠][唤醒][驾驶模式]。
[睡眠]
车辆断电状态。在此模式下,高压电池不供电,VCIB或其他VP ECU均未激活。
[唤醒]
VCIB被低压电池唤醒。在这种模式下,除了某些车身电子ECU以外,VCIB以外的ECU均未唤醒。
[驾驶模式]
Ready ON模式。在这种模式下,高压电池为整个VP供电,包括VCIB在内的所有VPECU均唤醒。
3.5.3.输出
表82
3.5.3.1.Power_Mode_Status
车辆平台的当前电源模式的状态
值
表83
备注
·VCIB将在执行睡眠序列后的3000[ms]内连续发送[睡眠]作为Power_Mode_Status。然后,VCIB将被关闭。
3.6.用于安全的API
3.6.1.功能
T.B.D.
3.6.2.输入
表84
3.6.3.输出
表85
3.6.3.1.Request for Operation(请求操作)
根据车辆平台的状态向ADS请求操作
值
表86
备注
T.B.D.
3.6.3.2.Passive_Safety_Functions_Triggered
碰撞检测信号
值
表87
备注
·当产生碰撞检测的事件时,每100[ms]连续发送50次信号。如果在信号发送完成之前碰撞检测状态发生变化,则发送优先级高的信号。
优先级:碰撞检测>正常
·不管碰撞时的普通响应如何,均会发送5s,因为车辆故障判断系统应在HV车辆撞车后5秒钟或更短的时间内发出关闭电压的请求。
在燃油切断运动延迟允许时间(1s)内,传输间隔为100ms,因此数据可以发送5次以上。在这种情况下,应考虑瞬时断电。
3.6.3.3.Brake_System_Degradation_Modes
表示制动系统状态
值
表88
备注
·当检测到故障时,安全停止被移动。
3.6.3.4.Propulsive_System_Degradation_Modes
表示动力总成系统状态
值
表89
备注
·当检测到故障时,安全停止被移动。
3.6.3.5.Direction_Control_Degradation_Modes
表示方向控制状态
值
表90
备注
·当检测到故障时,安全停止被移动。
·当检测到故障时,推进方向命令被拒绝。
3.6.3.6.WheelLock_Control_Degradation_Modes
表示车轮锁控制状态
值
表91
备注
·主要指示EPB状态,次要指示SBW指示。
·当检测到故障时,安全停止被移动。
3.6.3.7.Steering_System_Degradation_Modes
表示转向系统状态
值
表92
备注
·当检测到故障时,安全停止被移动。
3.6.3.8.Power_System_Degradation_Modes
[T.B.D]
3.6.3.9.Communication_Degradation_Modes
[T.B.D]
3.7.用于安全性的API
3.7.1.功能
T.B.D.
3.7.2.输入
表93
3.7.2.1.1st_Left_Door_Lock_Command,
1st_Right_Door_Lock_Command,2nd_Left_Door_Lock_Command,2nd_Right_Door_Lock_Command
控制车辆平台的各个门锁的命令
值
表94
备注
·锁定命令仅支持全部门锁定。
·解锁命令仅支持左第一门解锁和全部门解锁。
3.7.2.2.Central_Vehicle_Lock_Exterior_Command
控制车辆平台的全部门锁的命令
值
表95
备注
·锁定命令仅支持全部门锁定。
·解锁命令仅支持左第一门解锁和全部门解锁。
3.7.3.输出
表96
3.7.3.1.1st_Left_Door_Lock_Status
车辆平台的当前第一左门锁定模式的状态
值
表97
备注
·无法检测任何故障。
3.7.3.2.1st_Right_Door_Lock_Status
车辆平台的当前第一右门锁定模式的状态
值
表98
备注
·无法检测任何故障。
3.7.3.3.2nd_Left_Door_Lock_Status
车辆平台的当前第二左门锁定模式的状态
值
表99
备注
·无法检测任何故障。
3.7.3.4.2nd_Right_Door_Lock_Status
车辆平台的当前第二右门锁定模式的状态
值
表100
备注
·无法检测任何故障。
3.7.3.5.Central_Vehicle_Exterior_Locked_Status
车辆平台的当前全部门锁定模式的状态
值
表101
备注
·车辆平台参考各门锁定状态,
-如果任何门都未锁定,则发送0。
-如果所有门都锁定,则发送1。
3.7.3.6.Vehicle_Alarm_Status
车辆平台的当前车辆警报的状态
值
表102
备注
N/A
3.8.用于MaaS服务的API
3.8.1.功能
T.B.D.
3.8.2.输入
表103
3.8.3.输出
表104
[示例2]
丰田的MaaS车辆平台
架构规范
[标准版#0.1]
修订历史
表105
索引
1.一般概念 4
1.1.本规范的目的 4
1.2.目标车辆类型 4
1.3.目标电子平台 4
1.4.术语的定义 4
1.5.使用注意事项 4
1.6.MaaS的总体结构 4
1.7.采用的开发流程 6
1.8.ODD(运行设计域) 6
2.安全概念 7
2.1.概述 7
2.2.危害分析和风险评估 7
2.3.安全性要求的分配 8
2.4.冗余 8
3.安全性概念 10
3.1.概述 10
3.2.假定风险 10
3.3.风险对策 10
3.3.1.远程攻击的对策 11
3.3.2.修改对策 11
3.4.处理保留的数据信息 11
3.5.解决漏洞 11
3.6.与运营实体的合同 11
4.系统架构 12
4.1.概述 12
4.2.物理LAN架构(车载) 12
4.3.供电结构 14
5.功能分配 15
5.1.在健康情况下 15
5.2.在单个故障下 16
6.数据收集 18
6.1.在事件时 18
6.2.时常地 18
1.一般概念
1.1.本规范的目的
本文档是丰田MaaS车辆平台的架构规范,并且包含车辆级别的系统概述。
1.2.目标车辆类型
该规范适用于具有称为19ePF[ver.1和ver.2]的电子平台的丰田车辆。
具有19ePF的代表性车辆如下所示。
e-Palette,Sienna,RAV4等。
1.3.术语的定义
表106
1.4.使用注意事项
这是该文档的早期草案。
所有内容会有更改。这样的更改通知给用户。请注意,某些部分依然T.B.D,将来会更新。
2.架构概念
2.1.MaaS的总体结构
示出了具有目标车辆的MaaS的总体结构(图18)。
车辆控制技术被用作用于技术提供商的接口。
技术提供商可以接收开发自动驾驶系统所需的开放API,例如车辆状态和车辆控制。
2.2.关于车辆的系统架构的概述
示出了作为前提的关于车辆的系统架构(图19)。
本文档的目标车辆将采用为ADS和VCIB之间的总线使用CAN的物理架构。为了实现本文档中的各个API,CAN帧和比特分配以“比特分配表”的形式显示为单独的文档。
2.3.关于车辆的电源架构的概述
如下所示为作为前提的电源架构(图20)。
蓝色部分由ADS提供商提供。而橙色部分则由VP提供。
ADS的电源结构与VP的电源结构隔离。此外,ADS提供商应安装与VP隔离的冗余电源结构。
3.安全概念
3.1.总体安全概念
基本安全概念如下所示。
发生故障时使车辆安全停车的策略如下所示(图21)。
1.发生故障后,整个车辆执行“检测故障”和“纠正故障影响”,然后达到安全状态1。
2.遵守ADS的指示,整个车辆以安全速度(假定小于0.2G)停在安全空间内。
然而,视情况而定,如果需要,整个车辆的减速度应大于上述减速度。
3.停车后,为了防止打滑,整个车辆通过启动固定系统达到安全状态2。
表107
有关可通知的单个故障和ADS的预期行为,请参阅称为“故障管理”的单独文档。
3.2.冗余
示出了丰田的MaaS车辆的冗余功能性。
丰田的车辆平台具有以下冗余功能性,可以满足功能安全分析所提出的安全目标。
冗余制动
制动系统上的任何单个故障均不会导致制动功能性的丧失。但是,根据发生故障的位置,剩余的能力可能不等同于主系统的能力。在这种情况下,制动系统被设计成防止能力变为0.3G或更小。
冗余转向
转向系统上的任何单个故障均不会导致转向功能性的丧失。但是,根据发生故障的位置,剩余的能力可能不等同于主系统的能力。在这种情况下,转向系统被设计成防止能力变为0.3G或更小。
冗余固定
丰田的MaaS车辆具有2种固定系统,即P锁和EPB。因此,固定系统的任何单个故障都不会导致固定能力的丧失。但是,在发生故障的情况下,最大静止倾斜角不会比系统健康时陡。
冗余电源
电源系统上的任何单个故障都不会导致电源功能性的丧失。但是,在主电源出现故障的情况下,辅助电源系统会在一段时间内继续向有限的系统供电。
冗余通信
通信系统上的任何单个故障都不会导致所有通信功能性的丧失。需要冗余的系统具有物理冗余通信线路。有关更多详细信息,请参阅“物理LAN结构(车载)”一章。
4.安全性概念
4.1.概述
关于安全性,丰田公司的MaaS车辆采用丰田公司发布的安全性文档作为上层文档。
4.2.假定风险
整个风险不仅包括在基本e-PF上假定的风险,而且还包括对Autono-MaaS车辆假定的风险。
整个风险如下所示。
[远程攻击]
-对车辆
·欺骗中心
·ECU软件变更
·DoS攻击
·嗅探
-从车辆
·欺骗其他车辆
·用于中心或其他车辆上的ECU的软件变更
·对中心或其他车辆的DoS攻击
·上载非法数据
[修改]
·非法重编程
·设置非法的ADK
·客户安装未经认证的产品
4.3.风险对策
上述假定风险的对策如下所示。
4.3.1.远程攻击的对策
远程攻击的对策如下所示。
由于自动驾驶套件与操作实体的中心进行通信,因此应确保端到端的安全性。由于执行了提供行驶控制指令的功能,因此需要自动驾驶套件中的多层保护。在自动驾驶套件中使用安全的微型计算机或安全性芯片,并作为第一层提供足够的安全性措施,以防止来自外部的访问。使用另一个安全微型计算机和另一个安全性芯片提供作为第二层的安全性。(自动驾驶套件中的多层保护,包括作为第一层的防止从外部直接进入的保护,以及作为第二层的作为前者下方的层的保护)。
4.3.2.修改对策
修改的对策如下所示。
对于防伪自动驾驶套件采取的措施,执行设备身份验证和消息身份验证。在存储钥匙时,应提供防止篡改的措施,并为每对车辆和自动驾驶套件更换钥匙组。或者,合同应规定操作实体应进行充分的管理,以免附有未经授权的套件。对于防止Autono-MaaS车辆用户附上未经授权的产品的措施,合同应规定操作实体应行使管理权,不允许附有未经授权的套件。
在应用于实际车辆时,应一起进行可信的威胁分析,并应该完成用于解决LO时自动驾驶套件最新漏洞的措施。
5.功能分配
5.1.在健康的情况下
代表性功能性的分配如下所示(图22)。
[功能分配]
表108
5.2.在单个故障下
有关可通知的单个故障和ADS的预期行为,请参阅称为“故障管理”的单独文档。
尽管上面已经描述了本公开的实施例,但是应当理解,本文公开的实施例在各个方面都是说明性的而非限制性的。本发明的范围由权利要求的术语限定,并且意图包括在与权利要求的术语等同的范围和含义内的任何修改。
- 使用车辆的车辆计算单元执行一个或多个车辆应用的方法、车辆计算单元、用于提供用于车辆应用的许可信息清单的方法、用于车辆应用的许可信息清单和计算机程序
- 高处作业车辆、高处作业车辆的车辆姿势调整系统、高处作业车辆的车辆姿势调整方法、和高处作业车辆的高处作业构造物的旋转方法