一种便携式工业机器人示教器
文献发布时间:2023-06-19 12:16:29
技术领域
本发明涉及工业机器人操作设备技术领域,具体说是一种便携式工业机器人示教器。
背景技术
现有技术中,面对现代工业快速多变以及日益增长的复杂性要求,继柔性制造、计算机集成制造、精良生产及并行工程,在面向未来工业应用的生产单元中,机器人不仅被要求“不知疲倦”地进行简单重复工作,而且还要作为一个高度柔性、开放并具有友好的人机交互功能的可编程、可重构制造单元并融合到制造业系统中;而示教器就是其中重要的一项。
现有的机器人示教器大多是与控制器配套销售,其成本较高,用户的可选择性较低,专用的通讯模式决定了现有的示教器不能与其他控制器相兼容;有的机器人示教部分直接用嵌入式系统安装在控制柜上,不能移动操作,极为不便;并且现有的大部分示教器功能单元单一,用户的编辑操控性不佳。
发明内容
发明目的:针对上述现有技术存在的不足,提供一种便携式工业机器人示教器。
技术方案:为了实现上述发明目的,本发明采用的技术方案如下:一种便携式工业机器人示教器,包括示教器本体、通讯模块以及控制柜;所述示教器本体底部安装有PG转接头,通过该PG转接头连接安装有通讯线缆,而所述的通讯模块上则相应相应设置有航空插头、以太网口以及连接端子;所述的通讯线缆相应连接到通讯模块中的航空插头上。
所述的通讯模块安装在控制柜内,并且所述控制柜内还设置有控制器,所述控制器通过通讯模块上的以太网口与通讯模块相连,实现与示教器本体的通讯;所述的控制器还设置有IO模块,所述的IO模块相应与通讯模块上的航空插头相连,实现与示教器本体的通讯。
进一步地,所述的IO模块设置在控制器内部与控制器安装成一体或者所述的IO模块单独设置通过连线与控制器通讯。
进一步地,所述的示教器本体内部设置有芯片电路板,芯片电路板上包括ARM核心处理器,控制柜内控制器通过通讯模块与示教器本体内ARM核心处理器相连。
进一步地,所述的示教器本体上还安装有显示屏,该显示屏设置为触摸式电阻屏,该触摸式显示屏通过ARM核心处理器直接驱动控制。
进一步地,所述的示教器本体上显示屏下方还设置有薄膜按键,该薄膜按键与ARM核心处理器内的芯片电路板连接,示教器集成了modbusrtu、modbustcp、tcp和映射成标准的键盘等协议。
进一步地,所述的示教器本体上薄膜按键的下方还设置有手轮,示教器本体的上端部还设置有急停按钮,所述的手轮和急停按钮均相应通过通讯线缆与通讯模块连接。
进一步地,所述的示教器本体的侧面还设置有USB接口,该USB接口相应与ARM核心处理器的芯片电路板相连,用于用户数据交换。
进一步地,所述的示教器本体上还设置有波段开关、安全开关以及电源按钮。
进一步地,所述的示教器本体下端还设置有用于保护PG转接头的橡胶保护套;示教器本体的上端还安装有挂座保护机构;示教器本体的背部还安装有背带。
有益效果:本发明与现有技术相比,具有以下优点:本发明结构制作简单,成本低,功能单元丰富,方便用户操作,更一步的提高了性价比及安全性;示教器本体显示屏与ARM核心处理器芯片电路板相连,整体处理器与控制器通过以太网连接,大多控制器皆可以连接使用;并且各功能单元均可通过通讯线缆转至通讯模块上给用户连接,方便用户连接,降低了用户的接线难度。
附图说明
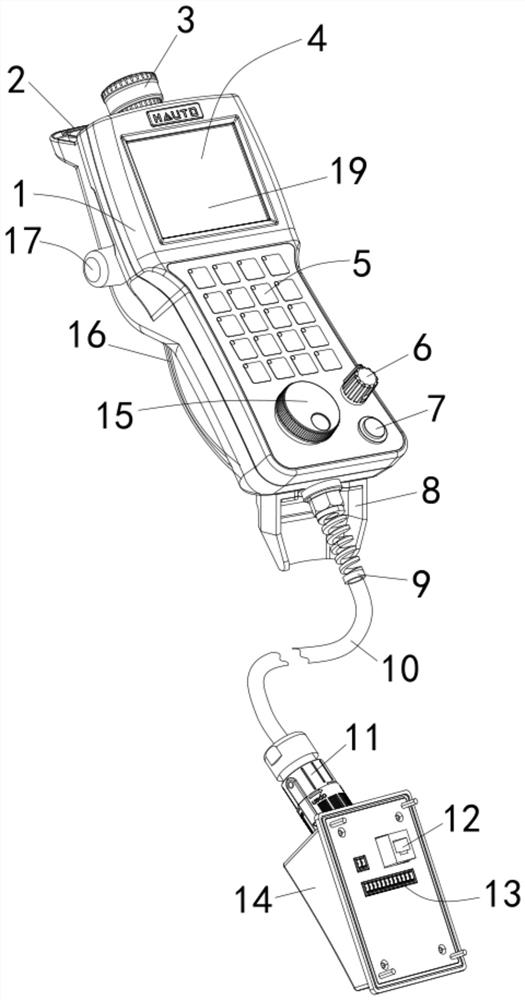
图1为本发明整体结构图;
图2为本发明背面结构图;
图3为本发明原理结构图。
具体实施方式
下面结合附图和具体实施例,进一步阐明本发明,本实施例在以本发明技术方案为前提下进行实施,应理解这些实施例仅用于说明本发明而不用于限制本发明的范围。
如图1、图2和图3所示,一种便携式工业机器人示教器,包括示教器本体1、通讯模块14以及控制柜21;示教器本体1底部安装有PG7转接头9,通过该PG7转接头9连接安装有通讯线缆10,而通讯模块14上则相应相应设置有航空插头11、以太网口12以及连接端子13;通讯线缆10相应连接到通讯模块14中的航空插头11上。
通讯模块14安装在控制柜21内,并且控制柜21内还设置有控制器20,控制器20通过通讯模块14上的以太网口12与通讯模块14相连,实现与示教器本体的通讯;控制器20还设置有IO模块,IO模块相应与通讯模块14上的航空插头11相连,实现与示教器本体1的通讯。控制器20内IO模块通过通讯模块14上的航空插头11与示教器本体1连接,从而实现急停、安全开关的功能。
其中,IO模块设置在控制器20内部与控制器20安装成一体或者所述的IO模块单独设置通过连线与控制器20通讯。
示教器本体1内部设置有ARM核心处理器,控制柜21内控制器20通过通讯模块14与示教器本体1内ARM核心处理器相连。
示教器本体1上还安装有显示屏19,该显示屏19设置为触摸式电阻屏,通过触摸式电阻屏可进行各种触摸交互操作。触摸式显示屏19通过ARM核心处理器直接驱动控制。
示教器本体1上显示屏19下方还设置有薄膜按键5,该薄膜按键5与ARM核心处理器内的芯片电路板连接,并相应通过modbusrtu通讯协议或modbustcp通讯协议映射成键盘,可方便用户操作。
示教器本体1上薄膜按键5的下方还设置有手轮15,示教器本体1的上端部还设置有急停按钮3,手轮15和急停按钮3均相应通过通讯线缆10与通讯模块14连接。手轮15可用于工作原点设定、步进微调与中断插入等动作;而几桶按钮3则在发生突发情况时,可立即停止机器,防止伤害或者损失扩大。
示教器本体1的侧面还设置有USB接口8,该USB接口8相应与ARM核心处理器的芯片电路板相连,用于用户数据交换;示教器本体1上还设置有波段开关6、安全开关17以及电源按钮7。
示教器本体1下端还设置有用于保护PG7转接头9的橡胶保护套8;示教器本体1的上端还安装有挂座保护机构2;示教器本体1的背部还安装有背带16。便于挂取及结构性保护急停作用;其中设置的背带,采用合理的手型结构可以让使用者对示教器使用更加便捷舒适。
本发明中示教器本体中ARM核心处理器中芯片电路板通过通讯线缆、航空插头以及通讯模块将控制器的显示画面显示到示教器上;使用时在控制器上安装对应系统及VNCserver软件,并设置为开机自启动,然后通过通讯线缆连接,使控制器与示教器通讯,将界面显示到示教器上;本发明可以实现快速远程连接,在具体使用时,通过系统设置软件,可以快速方便的更改本机ip以及连接的serve端ip、薄膜按键通讯方式、登陆密码等参数,将修改好的参数文件放到U盘中,然后U盘插到示教器上,通过开机按指定薄膜按键来实现把参数文件更新到示教器中;无需客户在示教器上二次开发。
发明结构制作简单,成本低,功能单元丰富,方便用户操作,更一步的提高了性价比及安全性;示教器本体显示屏与ARM核心处理器芯片电路板相连,整体处理器与控制器通过以太网连接,大多控制器皆可以连接使用;并且各功能单元均可通过通讯线缆转至通讯模块上给用户连接,方便用户连接,降低了用户的接线难度。
具体实施方式只是本发明的一个优选实施例,并不是用来限制本发明的实施与权利要求范围的,凡依据本发明申请专利保护范围内容做出的等效变化和修饰,均应包括于本发明专利申请范围内。
- 一种便携式工业机器人示教器
- 一种示教器输入输出功能处理系统及方法、工业机器人