一种数字流体先导驱动的双阀芯可编程控制液压阀及其控制方法
文献发布时间:2023-06-19 09:29:07
技术领域
本发明属于电液控制系统领域,具体涉及一种数字流体先导驱动的双阀芯可编程控制液压阀及其控制方法。
背景技术
电液比例阀是通过两端信号控制工作阀阀芯位移,使阀口尺寸发生改变,并以此完成与输入信号成比例的压力、流量输出元件。电液比例阀由于具有形式种类多样,控制精度高,抗污染能力强,容易与计算机对接等多方面优点,应用领域日益拓宽。因此,电液比例阀其结构和控制方案的好坏是判断一个液压系统是否先进的关键因素。
传统的电液比例阀采用一根阀芯控制,阀的进口与出口的开度有着连动的关系。对于需要提供背压的负载,传统的电液比例阀无法独立地调节阀的进口和出口压力,造成了能源的浪费。因此,双阀芯控制更具有灵活性,可以单独调节各阀芯的开度。负载进油口和出油口的阀芯位置和控制方式各自独立、互不影响,这样可以分别控制两油口的压力、流量,利用编程软件能很好地解决在一根阀芯的液压系统中难以实现的功能。
工业生产对电液控制系统的控制精度和响应速度的要求越来越高,因此出现了以高速开关阀为代表的可由计算机直接控制的数字液压元件。如何将高速开关技术与电液比例技术结合起来一直是液压领域学者的研究重点。
发明内容
本发明的目的在于克服现有技术的不足,提供一种数字流体先导驱动的双阀芯可编程控制液压阀及其控制方法。本发明的技术方案如下:
本发明公开了一种数字流体先导驱动的双阀芯可编程控制液压阀,其包括主阀体、8个高速开关阀、四个单向节流阀和两个三位三通比例阀;所述的两个三位三通比例阀位于主阀体内,8个高速开关阀安装在主阀体上;主阀体上开设有主油路P口、主油路T口、A口、B口、先导油路P口和先导油路T口;
主油路P口分别与两个三位三通比例阀的进油口P连接,主油路T口分别与两个三位三通比例阀的出油口T连接;主阀体A口与第一三位三通比例阀的工作油口连接,B口与第二三位三通比例阀的工作油口连接;先导油路P口与8个高速开关阀的进油口连接,先导油路T口与第五高速开关阀、第六高速开关阀、第七高速开关阀、第八高速开关阀的出油口连接;
第一三位三通比例阀的左右控制腔分别于第一高速开关阀和第二高速开关阀的出油口连接;第二三位三通比例阀的左右控制腔分别于第三高速开关阀和第四高速开关的出油口连接;
其中,先导油路P口通过第一单向节流阀和第一高速开关阀、第三高速开关阀的进油口连接;先导油路P口通过第二单向节流阀和第二高速开关阀、第四高速开关阀的进油口连接;第三高速开关阀和第四高速开关阀的出油口连接油箱;
先导油路P口通过第三单向节流阀和第五高速开关阀、第七高速开关阀的进油口连接;先导油路P口通过第四单向节流阀和第六高速开关阀、第八高速开关阀的进油口连接;第七高速开关阀和第八高速开关阀的出油口连接油箱。
在本发明的一个实施例中,8个高速开关阀动态性能完全相同,且为常闭高速开关阀,通过PWM信号控制高速开关阀的启闭占空比。
在本发明的一个实施例中,相邻高速开关阀安装位置之间的距离相同,高速开关阀以阵列形式排布。
在本发明的一个实施例中,所述的数字流体先导驱动的双阀芯可编程控制液压阀,还包括LVDT位移传感器和压力传感器;所述的LVDT位移传感器检测第一三位三通比例阀、第二三位三通比例阀的阀芯位移;所述的压力传感器检测主阀体P、T、A、B口的压力。
在本发明的一个实施例中,所述的数字流体先导驱动的双阀芯可编程控制液压阀,还包括控制器,所述的控制器获取LVDT位移传感器和压力传感器的数据,并通过PWM信号控制高速开关阀的启闭占空比。
在本发明的一个实施例中,所述的控制器包括位移闭环控制器,所述位移闭环控制器可设置位移阈值,并根据LVDT位移传感器与位移阈值的差值大小改变 PWM信号的占空比控制第五高速开关阀、第六高速开关阀、第七高速开关阀、第八高速开关阀。
在本发明的一个实施例中,所述的控制器内存储有流量数据组,每一组流量数据组至少包括阀口压差、目标流量、阀口开度参数;控制器根据用户输入的阀口压差和目标流量,可查询得到阀口开度,并以阀口开度作为位移闭环控制器的位移阈值,流量数据组由事先测试获得。
本发明还公开了一种所述双阀芯可编程控制液压阀的控制方法:
第一三位三通比例阀的工作口A和第二三位三通比例阀的工作口B分别连接负载的进出油口,8个高速开关阀均处于关闭状态;开启工作时,控制器通过 PWM信号给第一高速开关阀、第二高速开关阀、第三高速开关阀和第四高速开关相同的且逐渐增大的占空比,使上述四个高速开关阀同时完全开启后占空比保持不变,由于作用在第一三位三通比例阀和第二三位三通比例阀左右控制腔的油压是相等的,两个三位三通比例阀处于中位;
控制器输出PWM信号控制第六高速开关阀以占空比τ工作,第五高速开关阀仍处于关闭状态,第一三位三通比例阀阀芯左控制腔液压力大于右控制腔的液压力,此时阀芯向右移动,第一三位三通比例阀的进油口与工作口相连;控制器接收到阀芯位移传感器的信号,将其与目标位移信号进行对比,并进行闭环运算,更新第六高速开关阀的占空比;改变第六高速开关阀的PWM信号驱动占空比,可控制第一三位三通比例阀阀芯左右控制腔的压力差大小,用以调节阀口的开度;通过安装在比例阀上的LVDT位移传感器和压力传感器反馈阀芯的位移和压力、流量参数至控制器,控制器通过闭环运算控制第六高速开关阀,确保第一三位三通比例阀的A口输出所需的压力流量;同理,通过调节第七高速开关阀的工作占空比,第八高速开关阀处于关闭状态,即可使得第二三位三通比例阀的阀芯向左移动并且调节阀口的开度;
当第一三位三通比例阀的阀芯到达目标位置时,同时关闭第一高速开关阀和第二高速开关阀,左右控制腔的油压相等,阀芯不再移动;当第二三位三通比例阀的阀芯到达目标位置时,同时关闭第三高速开关阀和第四高速开关,左右控制腔的油压相等,阀芯不再移动。
本发明采用高速开关阀组成的先导级控制比例阀的阀芯,其优点在于:调节比例阀阀芯位置时,能极大地减少比例阀两端油压扰动,提高比例阀工作时的稳定性;维持比例阀阀芯位置时,能完全消除比例阀两端油压扰动,并使得油路上的所有高速开关阀处于常关状态,降低了高速开关阀的工作损耗,提高了油路的工作寿命。
附图说明
图1为数字流体先导驱动的双阀芯可编程控制液压阀的结构示意图一;
图2为数字流体先导驱动的双阀芯可编程控制液压阀的结构示意图二;
图3为数字流体先导驱动的双阀芯可编程控制液压阀的俯视图;
图4为数字流体先导驱动的双阀芯可编程控制液压阀的油路俯视图;
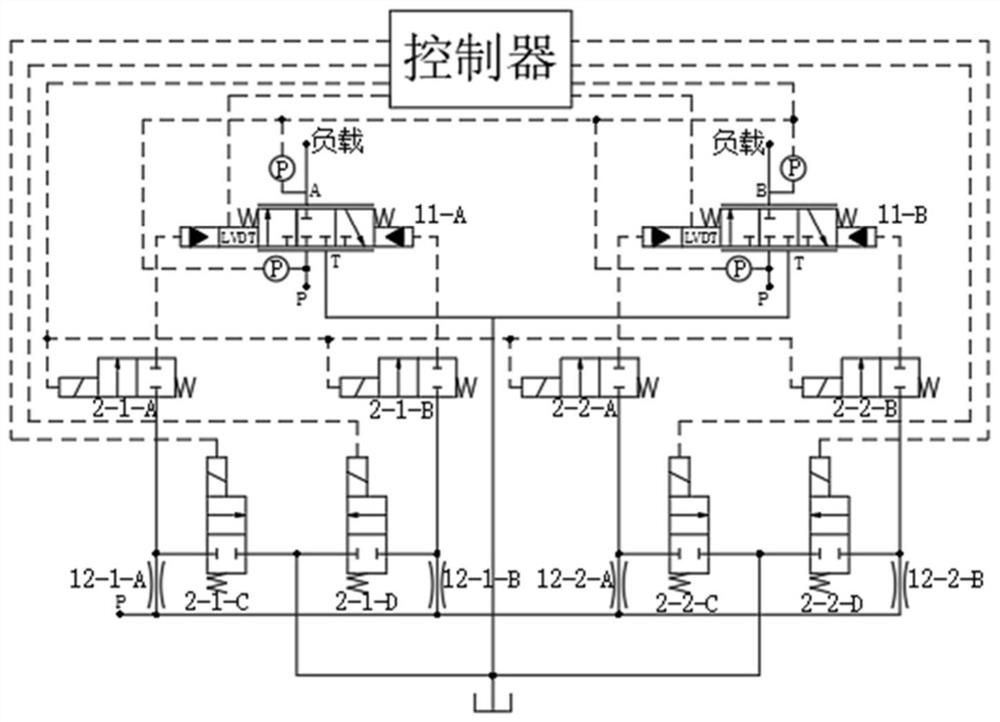
图5为数字流体先导驱动的双阀芯可编程控制液压阀的控制示意图;
图6为图3的剖视图A-A的油路示意图;
图7为高速开关阀剖面图。
具体实施方式
下面结合具体实施方式对本发明做进一步阐述和说明。本发明中各个实施方式的技术特征在没有相互冲突的前提下,均可进行相应组合。
如图1-5所示,本发明公开了一种数字流体先导驱动的双阀芯可编程控制液压阀,其包括主阀体(1)、8个高速开关阀、四个单向节流阀和两个三位三通比例阀;所述的两个三位三通比例阀位于主阀体(1)内,8个高速开关阀安装在主阀体上;主阀体(1)上开设有主油路P口(7)、主油路T口(8)、A口(4)、 B口(5)、先导油路P口(9)和先导油路T口(10);
主油路P口(7)分别与两个三位三通比例阀(11-A/11-B)的进油口P连接,主油路T口(10)分别与两个三位三通比例阀(11-A/11-B)的出油口T连接;主阀体(1)A口与第一三位三通比例阀(11-A)的工作油口连接,B口与第二三位三通比例阀(11-B)的工作油口连接;先导油路P口(9)与8个高速开关阀的进油口连接,先导油路T口(10)与第五高速开关阀(2-1-C)、第六高速开关阀(2-1-D)、第七高速开关阀(2-2-C)、第八高速开关阀(2-2-D)的出油口连接;
第一三位三通比例阀(11-A)的左右控制腔分别于第一高速开关阀(2-1-A) 和第二高速开关阀(2-1-B)的出油口连接;第二三位三通比例阀(11-B)的左右控制腔分别于第三高速开关阀(2-2-A)和第四高速开关(2-2-B)的出油口连接;其中,先导油路P口通过第一单向节流阀(12-1-A)和第一高速开关阀(2-1-A)、第三高速开关阀(2-1-C)的进油口连接;先导油路P口通过第二单向节流阀(12-1-B)和第二高速开关阀(2-1-B)、第四高速开关阀(2-1-D)的进油口连接;第三高速开关阀(2-1-C)和第四高速开关阀(2-1-D)的出油口连接油箱;
先导油路P口通过第三单向节流阀(12-2-A)和第五高速开关阀(2-2-A)、第七高速开关阀(2-2-C)的进油口连接;先导油路P口通过第四单向节流阀(12-2-B) 和第六高速开关阀(2-2-B)、第八高速开关阀(2-2-D)的进油口连接;第七高速开关阀(2-2-C)和第八高速开关阀(2-2-D)的出油口连接油箱。
先导油路T口可以根据需要和主油路T口连接同一个油箱或分开连接两个不同油箱。
如图1、2、3和7所示,8个高速开关阀动态性能完全相同,且为常闭高速开关阀,通过PWM信号控制高速开关阀的启闭占空比。相邻高速开关阀之间的距离相同。本发明以4个高速开关阀为一组控制一个三位三通比例阀。通过第五高速开关阀(2-1-C)、第六高速开关阀(2-1-D)的开合控制第一三位三通比例阀 (11-A)左右控制腔的油压调整比例阀阀口开度;通过第七高速开关阀(2-2-C)、第八高速开关阀(2-2-D)的开合控制第二三位三通比例阀(11-B)左右控制腔的油压调整比例阀阀口开度;通过第一高速开关阀(2-1-A)和第二高速开关阀(2-1-B) 的闭合来锁定第一三位三通比例阀(11-A)阀口方向和开度;通过第三高速开关阀 (2-2-A)和第四高速开关(2-2-B)的闭合来锁定第二三位三通比例阀(11-B)阀口方向和开度。
在本发明的一个实施例中,所述的数字流体先导驱动的双阀芯可编程控制液压阀,还包括LVDT位移传感器和压力传感器;所述的LVDT位移传感器检测第一三位三通比例阀(11-A)、第二三位三通比例阀(11-B)的阀芯位移;所述的压力传感器检测主阀体(1)P、T、A、B口的压力。
在本发明的一个实施例中,所述的数字流体先导驱动的双阀芯可编程控制液压阀,还包括控制器,所述的控制器获取LVDT位移传感器和压力传感器的数据,并通过PWM信号控制高速开关阀的启闭占空比。
在本发明的一个实施例中,所述的控制器包括位移闭环控制器,所述位移闭环控制器可设置位移阈值,并根据LVDT位移传感器与位移阈值的差值大小改变 PWM信号的占空比控制第五高速开关阀(2-1-C)、第六高速开关阀(2-1-D)、第七高速开关阀(2-2-C)、第八高速开关阀(2-2-D)。
本发明的数字流体先导驱动的双阀芯可编程控制液压阀结构由主级和先导级组成,主级是由两个独立阀芯的三位三通比例阀组成,先导级是由两组共八个高速开关阀组成,每个高速开关阀动态性能完全相同,每组高速开关阀控制其中一个比例阀。LVDT位移传感器用于反馈比例阀阀芯的位移至控制器,压力传感器反馈比例阀PTAB口的压力流量参数至控制器,控制器的输出端与高速开关阀连接,控制器通过PWM信号控制高速开关阀的启闭占空比。
第一三位三通比例阀11-A的工作口A和第二三位三通比例阀11-B的工作口 B分别连接负载的进出油口,高速开关阀均处于关闭状态,开启时,控制器通过 PWM信号给高速开关阀2-1-A,2-1-B,2-2-A,2-2-B相同的且逐渐增大的占空比,待高速开关阀同时完全开启后占空比保持不变,由于高速开关阀启闭特性相同且动态响应快,因此作用在第一三位三通比例阀11-A和第二三位三通比例阀11-B 左右控制腔的油压是相等的,两个三位三通比例阀处于中位。
当第一三位三通比例阀11-A的工作口连接负载进油口,第二三位三通比例阀11-B的工作口连接负载出油口时,高速开关阀2-1-A,2-1-B,2-2-A,2-2-B仍然保持完全打开,控制器输出PWM信号控制第六高速开关阀2-1-D以占空比τ工作,第五高速开关阀2-1-C仍处于关闭状态,第一三位三通比例阀11-A阀芯左控制腔液压力大于右控制腔的液压力,此时阀芯向右移动,第一三位三通比例阀11-A的进油口与工作口相连。控制器接收到阀芯位移传感器的信号,将其与目标位移信号进行对比,并进行闭环运算,更新第六高速开关阀2-1-D的占空比τ,改变第六高速开关阀2-1-D的PWM信号驱动占空比,可控制第一三位三通比例阀11-A阀芯左右控制腔的压力差大小,用以调节阀口的开度。通过安装在比例阀上的LVDT位移传感器和压力传感器反馈阀芯的位移和压力、流量参数至控制器,控制器通过闭环运算控制第六高速开关阀2-1-D,确保第一三位三通比例阀11-A的A口输出所需的压力流量,提高控制精度。第二三位三通比例阀 11-B的工作原理同理,调节第七高速开关阀2-2-C的工作占空比,第八高速开关阀2-2-D处于关闭状态,即可使得阀芯向左移动并且调节阀口的开度。
同理,若要第一三位三通比例阀11-A的工作口连接负载出油口,第二三位三通比例阀11-B的工作口连接负载进油口,只要关闭第六高速开关阀2-1-D和第七2-2-C,通过改变第五高速开关阀2-1-C和第八高速开关阀2-2-D的PWM信号驱动占空比。
当第一三位三通比例阀11-A的阀芯到达目标位置时,同时关闭高速开关阀2-1-A,2-1-B,2-1-C,2-1-D,左右控制腔的油压相等,阀芯不再移动。比例阀11-B 的关闭原理同理。
两个三位三通比例阀的工作口各自独立,互不影响,在需要提供背压的负载或者对负载的压力流量等参数需要复合控制的时候,双阀芯方案能够很好的实现所需功能,减少能源的浪费。两个三位三通比例阀均带有各自的LVDT位移传感器和压力传感器,可实时监测负载进出油口的压力和流量,将参数信号反馈至控制器,控制器中设置有闭环控制参数调整功能,可以通过调整参数来改变位移闭环控制、压力闭环控制和流量闭环控制过程中的动态性能,实现双阀芯的可编程控制。
特别地,先导级的八个高速开关阀动态性能完全相同,通过PWM控制,实现在相同频率,不同或相同的占空比下工作。
同时,控制器检测PTAB四个口的压力状况,可以根据用户对每个口的压力要求,移动主阀芯实现对相应油口的压力控制。
在本发明的一个实施例中,所述的控制器内存储有流量数据组,每一组流量数据组至少包括阀口压差、目标流量、阀口开度参数;控制器根据用户输入的阀口压差和目标流量,可查询得到阀口开度,并以阀口开度作为位移闭环控制器的位移阈值。流量数据组由事先测试获得,对阀进行不同阀口压差、不同阀口开度下的流量输出实验,并将这些数据记录,储存在控制器中。当需要进行流量控制时,控制器根据目标流量,查询储存在控制器里的流量数据,进行查表运算,获得当前阀口压差下,实现目标流量所需的阀口开度,并通过位移传感器行程位移闭环控制,使阀芯位移移动至查表输出的位移结果。重复上述查表过程和位移闭环控制过程,直到液压阀输出流量与目标流量一致。
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
- 一种数字流体先导驱动的双阀芯可编程控制液压阀及其控制方法
- 一种高速开关阀先导控制的双阀芯可编程控制液压阀及其方法