水改油模锻压机移动横梁速度同步补偿控制系统及方法
文献发布时间:2023-06-19 09:36:59
技术领域
本发明属于冶金设备技术领域,具体涉及水改油模锻压机移动横梁速度同步补偿控制系统及方法。
背景技术
国宝级设备300MN模锻水压机,在多年使用后,设备能耗高、精度低,尤其是水压系统零部件容易损坏,并且操作的环境较差。升级改造为油压驱动后能耗会大幅降低,设备精度提高,可靠性提高。但大型模锻压机的移动横梁几何尺寸特大,长达10m以上,四个油缸驱动时,由于各个角的阻力大小有差别,会导致油缸移动速度的不一致。
发明内容
本发明提供了水改油模锻压机移动横梁速度同步补偿控制系统及方法,目的在于能够同步协调控制移动横梁速度,满足大型模锻压机精度的要求。
为了实现上述目的,本发明采用的技术方案是:
水改油模锻压机移动横梁速度同步补偿控制系统,至少包括移动横梁,还包括四个横梁同步控制油缸、四个移动横梁位置检测装置、控制阀组A、控制阀组B、液压管路、第一油泵、第二油泵和油箱;所述的四个横梁同步控制油缸的输出端分别固定在移动横梁四个角的下表面;所述四个移动横梁位置检测装置设置在移动横梁的四个角;所述的控制阀组A和控制阀组B结构相同,且每个控制阀组分别通过液压管路与移动横梁对角线上的两个横梁同步控制油缸的上腔和下腔连通;所述的第一油泵和第二油泵分别通过液压管路将油箱与控制阀组A、控制阀组B连通。
还包括PLC控制器;所述的PLC控制器分别与四个移动横梁位置检测装置、控制阀组A、控制阀组B、第一油泵和第二油泵电信号连接。
所述的控制阀组A包括第一比例流量阀、系统调压阀、第二比例流量阀、基准压力阀、单向阀、泵头循环阀、油路P1进液阀、油路P1排液阀、油路P2进液阀、油路P2排液阀、油路P2和油路P1;所述的泵头循环阀、系统调压阀和基准压力阀的输入端均通过第一油泵与油箱连通;泵头循环阀的输出端分别与第一比例流量阀输入端、第二比例流量阀输入端及油箱连通;所述第一比例流量阀输出端通过单向阀与油路P1进液阀及油路P2进液阀连通,油路P1进液阀的输出端通过油路P1排液阀与油路P1连通,油路P2进液阀的输出端通过油路P2排液阀与油路P2连通;油路P1与位于移动横梁对角线上的其中一个横梁同步控制油缸的上腔连通,油路P2与位于移动横梁对角线上的另一个横梁同步控制油缸的下腔连通。
所述的油路P1排液阀和油路P2排液阀的输出管路上分别设置有油路P1安全阀和油路P2安全阀。
所述的四个横梁同步控制油缸均为相同的双输出轴油缸。
所述的四个横梁同步控制油缸的两端轴伸尺寸和大小均相同。
所述的移动横梁位置检测装置采用的是位移传感器。
水改油模锻压机移动横梁速度同步补偿控制系统的控制方法,包括如下步骤,
步骤一:将四个横梁同步控制油缸即第一移动横梁同步控制油缸、第二移动横梁同步控制油缸、第三移动横梁同步控制油缸和第四移动横梁同步控制油缸中的第一移动横梁同步控制油缸和第三移动横梁同步控制油缸、第二移动横梁同步控制油缸与第四移动横梁同步控制油缸分别设置在移动横梁对角线的对角上;
步骤二:当移动横梁空载向下且移动横梁处于水平状态时,进入步骤三,当移动横梁空载向下且移动横梁发生倾斜时,进入步骤四;当移动横梁加压且移动横梁处于水平状态时,进入步骤五,当移动横梁加压且移动横梁发生倾斜时,进入步骤六;
步骤三:PLC控制器控制泵头循环阀打开,油泵卸荷,油路P1进液阀、油路P1排液阀、油路P2进液阀、油路P2排液阀均关闭,油路P1、P2封闭,基准压力阀设定为高压,使对角线上的两个同步控制油缸具有相同的基准压力;
步骤四:当PLC控制器收到移动横梁位置检测装置检测到的移动横梁发生倾斜的信号,若判断倾斜超出预定值后,PLC控制器给连通高位的横梁同步控制油缸的控制阀组发出指令,所述控制阀组上相应油路的进液阀打开,控制阀组上的另一油路的排液阀打开,泵头循环阀关闭、系统调压阀调节至低压,第一低压比例流量阀给定最大值、第二比例流量阀给定补偿值、基准压力阀调节至低压,开始空载补偿,调整位于高位的横梁同步控制油缸上腔和位于低位的横梁同步控制油缸下腔压力,减小移动横梁的倾斜值;当移动横梁重新处于水平状态时,泵头循环阀打开、油路P2排液阀关闭、油路P1进液阀关闭,停止空载补偿,基准压力阀调节至高压;
步骤五:泵头循环阀打开,油泵卸荷,油路P1进液阀、油路P1排液阀、油路P2进液阀、油路P2排液阀均关闭,油路P1、P2封闭,基准压力阀设定为高压,使对角线上的两个同步控制油缸具有相同的基准压力;
步骤六:当PLC控制器收到移动横梁位置检测装置检测到的移动横梁发生倾斜的信号,若判断倾斜超出预定值后,PLC控制器给连通高位的横梁同步控制油缸的控制阀组发出指令,所述控制阀组上相应油路的进液阀打开、控制阀组上的另一油路的排液阀打开、泵头循环阀关闭、系统调压阀调节至高压,第二压比例流量阀给定最大值、第一比例流量阀给定补偿值、基准压力阀调节至低压,开始加压补偿,调整位于高位的横梁同步控制油缸上腔和位于低位的横梁同步控制油缸下腔压力,减小移动横梁的倾斜值;当移动横梁重新处于水平状态时,泵头循环阀打开、油路P2排液阀关闭、油路P1进液阀关闭,停止加压补偿,基准压力阀调节至高压。
有益效果:
本发明通过PLC控制器对移动横梁对角线上的横梁同步控制油缸的分组控制,使得大型模锻压机在移动横梁的运动过程中,消除了移动横梁单个角的翘起,使移动横梁四个角同步移动,有效提高了模锻压机的锻造精度。
上述说明仅是本发明技术方案的概述,为了能够更清楚的了解本发明的技术手段,并可依照说明书的内容予以实施,以下以本发明的较佳实施例,详细说明如后。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
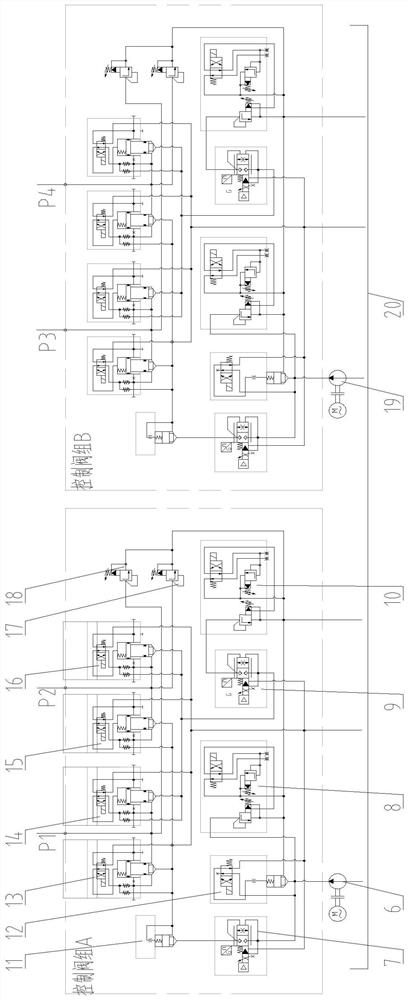
图1是本发明移动横梁同步控制控制原理示意图;
图2是本发明移动横梁同步控制结构示意图。
图中:1-移动横梁;2-第一移动横梁同步控制油缸;3-第二移动横梁同步控制油缸;4-第三移动横梁同步控制油缸;5-第四移动横梁同步控制油缸;6-第一油泵;7-第一比例流量阀;8-系统调压阀;9-第二比例流量阀;10-基准压力阀;11-单向阀;12-泵头循环阀;13-油路P1进液阀;14-油路P1排液阀;15-油路P2进液阀;16-油路P2排液阀;17-油路P2安全阀;18-油路P1安全阀;19-第二油泵;20-油箱;2a.第一移动横梁位置检测装置,3a.第二移动横梁位置检测装置,4a.第三移动横梁位置检测装置C,5a.第四移动横梁位置检测装置。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例一:
参照图1和图2所示的水改油模锻压机移动横梁速度同步补偿控制系统,至少包括移动横梁1,还包括四个横梁同步控制油缸、四个移动横梁位置检测装置、控制阀组A、控制阀组B、液压管路、第一油泵6、第二油泵19和油箱20;所述的四个横梁同步控制油缸的输出端分别固定在移动横梁1四个角的下表面;所述四个移动横梁位置检测装置设置在移动横梁1的四个角;所述的控制阀组A和控制阀组B结构相同,且每个控制阀组分别通过液压管路与移动横梁1对角线上的两个横梁同步控制油缸的上腔和下腔连通;所述的第一油泵6和第二油泵19分别通过液压管路将油箱20与控制阀组A、控制阀组B连通。
本发明的技术方案中,四个横梁同步控制油缸分设在移动横梁1的四个角上,驱动移动横梁1,四个移动横梁位置检测装置分设在移动横梁的四个角,用来检测四个角的实时位移;四个横梁同步控制油缸中对角线的两个横梁同步控制油缸用同一控制阀组控制,对角线的这两个横梁同步控制油缸可以协调控制移动横梁1对角线的翻转;两个控制阀组分别固定安装在油箱20上,通过液压管路与横梁同步控制油缸连接;第一油泵6、第二油泵19布置在油箱侧面,通过液压管路与油箱20及两个控制阀组连接。
在移动横梁1运动过程中,如果运动平稳,四个角的位置检测装置检测的数据相差无几,就不需要调整;如果在运行过程中,出现不同步的情况,也就是四个角的检测数据超出了允许的误差范围,则对移动横梁1进行同步调整,具体的调整是根据数据的差异,对对角线上的两个横梁同步控制油缸一起进行调整,如果有一个向上翘起,就控制这个角的横梁同步控制油缸会将此角向下拉,同时对角线的油缸会将对角线的角向上推,从而消除向上翘起的趋势。如果是向下翘起,这个角油缸会将此角向上推,同时对角线的油缸会将对角线的角向下拉,从而消除向下翘起的趋势;通过这种控制,可以使移动横梁平稳的移动,有效提高了模锻压机的锻造精度。
实施例二:
参照图1和图2所示的水改油模锻压机移动横梁速度同步补偿控制系统,在实施例一的基础上,还包括PLC控制器;所述的PLC控制器分别与四个移动横梁位置检测装置、控制阀组A、控制阀组B、第一油泵6和第二油泵19电信号连接。
在实际使用时,PLC控制器的设置,提高了移动横梁速度同步补偿的自动化程度,且有效提高了模锻压机的锻造精度。
实施例三:
参照图1和图2所示的水改油模锻压机移动横梁速度同步补偿控制系统,在实施例一的基础上:所述的控制阀组A包括第一比例流量阀7、系统调压阀8、第二比例流量阀9、基准压力阀10、单向阀11、泵头循环阀12、油路P1进液阀13、油路P1排液阀14、油路P2进液阀15、油路P2排液阀16、油路P2和油路P1;所述的泵头循环阀12、系统调压阀8和基准压力阀10的输入端均通过第一油泵6与油箱20连通;泵头循环阀12的输出端分别与第一比例流量阀7输入端、第二比例流量阀9输入端及油箱20连通;所述第一比例流量阀7输出端通过单向阀11与油路P1进液阀13及油路P2进液阀15连通,油路P1进液阀13的输出端通过油路P1排液阀14与油路P1连通,油路P2进液阀15的输出端通过油路P2排液阀16与油路P2连通;油路P1与位于移动横梁1对角线上的其中一个横梁同步控制油缸的上腔连通,油路P2与位于移动横梁1对角线上的另一个横梁同步控制油缸的下腔连通。
在实际使用时,将四个横梁同步控制油缸即第一移动横梁同步控制油缸2、第二移动横梁同步控制油缸3、第三移动横梁同步控制油缸4和第四移动横梁同步控制油缸5中的第一移动横梁同步控制油缸2和第三移动横梁同步控制油缸4、第二移动横梁同步控制油缸3与第四移动横梁同步控制油缸5分别设置在移动横梁1对角线的对角上;当移动横梁1空载向下且移动横梁1处于水平状态时,PLC控制器控制泵头循环阀12打开,油泵6卸荷,油路P1进液阀13、油路P1排液阀14、油路P2进液阀15、油路P2排液阀16均关闭,油路P1、P2封闭,基准压力阀10设定为高压,使对角线上的两个同步控制油缸具有相同的基准压力。当移动横梁1空载向下且移动横梁1发生倾斜时,当PLC控制器收到移动横梁位置检测装置检测到的移动横梁1发生倾斜的信号,若判断倾斜超出预定值后,PLC控制器给连通高位的横梁同步控制油缸的控制阀组发出指令,所述控制阀组上相应油路的进液阀打开,控制阀组上的另一油路的排液阀打开,泵头循环阀12关闭、系统调压阀8调节至低压,第一低压比例流量阀7给定最大值、第二比例流量阀9给定补偿值、基准压力阀10调节至低压,开始空载补偿。其中的第二比例流量阀9给定补偿值进行补偿方法如下:设定空载倾斜值和平衡值,当空载倾斜值超过1.2mm,补偿系统启动,倾斜值小于0.3mm时认为已达到平衡。在此调节过程中,开始时阀9给大值,随着倾斜值的减小阀9的给值也减小。具体的给定补偿值要根据移动横梁的空载速度进行调试。随后调整位于高位的横梁同步控制油缸上腔和位于低位的横梁同步控制油缸下腔压力,减小移动横梁1的倾斜值;当移动横梁1重新处于水平状态时,泵头循环阀12打开、油路P2排液阀16关闭、油路P1进液阀13关闭,停止空载补偿,基准压力阀10调节至高压。当移动横梁1加压且移动横梁1处于水平状态时,泵头循环阀12打开,油泵6卸荷,油路P1进液阀13、油路P1排液阀14、油路P2进液阀15、油路P2排液阀16均关闭,油路P1、P2封闭,基准压力阀10设定为高压,使对角线上的两个同步控制油缸具有相同的基准压力。当移动横梁1加压且移动横梁1发生倾斜时,当PLC控制器收到移动横梁位置检测装置检测到的移动横梁1发生倾斜的信号,若判断倾斜超出预定值后,PLC控制器给连通高位的横梁同步控制油缸的控制阀组发出指令,所述控制阀组上相应油路的进液阀打开、控制阀组上的另一油路的排液阀打开、泵头循环阀12关闭、系统调压阀8调节至高压,第二压比例流量阀9给定最大值、第一比例流量阀7给定补偿值、基准压力阀10调节至低压,开始加压补偿。其中第一比例流量阀7给定补偿值进行补偿方法如下:设定负载倾斜值和平衡值,当负载倾斜值超过0.8mm,补偿系统启动,倾斜值小于0.3mm时认为已达到平衡。在此调节过程中,开始时阀7给大值,随着倾斜值的减小阀7的给值也减小。具体给定值要根据移动横梁的负载速度进行调试。随后,调整位于高位的横梁同步控制油缸上腔和位于低位的横梁同步控制油缸下腔压力,减小移动横梁1的倾斜值;当移动横梁1重新处于水平状态时,泵头循环阀12打开、油路P2排液阀16关闭、油路P1进液阀13关闭,停止加压补偿,基准压力阀10调节至高压。
本发明通过PLC控制器对移动横梁1对角线上的横梁同步控制油缸的分组控制,使得大型模锻压机在移动横梁的运动过程中,消除了移动横梁单个角的翘起,使移动横梁四个角同步移动,有效提高了模锻压机的锻造精度。
实施例四:
参照图1和图2所示的水改油模锻压机移动横梁速度同步补偿控制系统,在实施例三的基础上:所述的油路P1排液阀14和油路P2排液阀16的输出管路上分别设置有油路P1安全阀18和油路P2安全阀17。
在具体应用时,油路P1安全阀18和油路P2安全阀17的设置,可以根据横梁同步控制油缸的机械设计压力给定合适的调节值,以防横梁同步控制油缸超压损坏。
实施例五:
参照图1和图2所示的水改油模锻压机移动横梁速度同步补偿控制系统,在施例一的基础上:所述的四个横梁同步控制油缸均为相同的双输出轴油缸。
进一步的,所述的四个横梁同步控制油缸的两端轴伸尺寸和大小均相同。
在实际使用时,四个横梁同步控制油缸采用本技术方案,使得调整更加简单且精确度更高。
实施例六:
参照图1和图2所示的水改油模锻压机移动横梁速度同步补偿控制系统,在实施例一的基础上:所述的移动横梁位置检测装置采用的是位移传感器。
在实际使用时,移动横梁位置检测装置采用本技术方案,不仅能满足检测要求,且节约成本。
本实施例中的位移传感器,采用的是MTS公司生产的型号为PB-S-1900M-D63-1-P102的位移传感器。
实施例七:
参照图1和图2所示的水改油模锻压机移动横梁速度同步补偿控制系统的控制方法,包括如下步骤,
步骤一:将四个横梁同步控制油缸即第一移动横梁同步控制油缸2、第二移动横梁同步控制油缸3、第三移动横梁同步控制油缸4和第四移动横梁同步控制油缸5中的第一移动横梁同步控制油缸2和第三移动横梁同步控制油缸4、第二移动横梁同步控制油缸3与第四移动横梁同步控制油缸5分别设置在移动横梁1对角线的对角上;
步骤二:当移动横梁1空载向下且移动横梁1处于水平状态时,进入步骤三,当移动横梁1空载向下且移动横梁1发生倾斜时,进入步骤四;当移动横梁1加压且移动横梁1处于水平状态时,进入步骤五,当移动横梁1加压且移动横梁1发生倾斜时,进入步骤六;
步骤三:PLC控制器控制泵头循环阀12打开,油泵6卸荷,油路P1进液阀13、油路P1排液阀14、油路P2进液阀15、油路P2排液阀16均关闭,油路P1、P2封闭,基准压力阀10设定为高压,使对角线上的两个同步控制油缸具有相同的基准压力;
步骤四:当PLC控制器收到移动横梁位置检测装置检测到的移动横梁1发生倾斜的信号,若判断倾斜超出预定值后,PLC控制器给连通高位的横梁同步控制油缸的控制阀组发出指令,所述控制阀组上相应油路的进液阀打开,控制阀组上的另一油路的排液阀打开,泵头循环阀12关闭、系统调压阀8调节至低压,第一低压比例流量阀7给定最大值、第二比例流量阀9给定补偿值、基准压力阀10调节至低压,开始空载补偿,调整位于高位的横梁同步控制油缸上腔和位于低位的横梁同步控制油缸下腔压力,减小移动横梁1的倾斜值;当移动横梁1重新处于水平状态时,泵头循环阀12打开、油路P2排液阀16关闭、油路P1进液阀13关闭,停止空载补偿,基准压力阀10调节至高压;
步骤五:泵头循环阀12打开,油泵6卸荷,油路P1进液阀13、油路P1排液阀14、油路P2进液阀15、油路P2排液阀16均关闭,油路P1、P2封闭,基准压力阀10设定为高压,使对角线上的两个同步控制油缸具有相同的基准压力;
步骤六:当PLC控制器收到移动横梁位置检测装置检测到的移动横梁1发生倾斜的信号,若判断倾斜超出预定值后,PLC控制器给连通高位的横梁同步控制油缸的控制阀组发出指令,所述控制阀组上相应油路的进液阀打开、控制阀组上的另一油路的排液阀打开、泵头循环阀12关闭、系统调压阀8调节至高压,第二压比例流量阀9给定最大值、第一比例流量阀7给定补偿值、基准压力阀10调节至低压,开始加压补偿,调整位于高位的横梁同步控制油缸上腔和位于低位的横梁同步控制油缸下腔压力,减小移动横梁1的倾斜值;当移动横梁1重新处于水平状态时,泵头循环阀12打开、油路P2排液阀16关闭、油路P1进液阀13关闭,停止加压补偿,基准压力阀10调节至高压。
在实际使用时,采用本发明的技术方案,使得大型模锻压机在移动横梁的运动过程中,消除了移动横梁单个角的翘起,使移动横梁四个角同步移动,有效提高了模锻压机的锻造精度,使得产品的质量更好。
实施例八:
参照图1和图2所示的水改油模锻压机移动横梁速度同步补偿控制系统的控制方法。
移动横梁1设有四个完全相同的同步控制油缸,这四个油缸为双输出轴油缸,两端轴伸尺寸和大小均相同。活动横梁1有四个位置传感器装置,这四个位置传感器装置分别设在活动横梁的四个角。第一同步控制油缸2、第一移动横梁位置检测装置2a和第四同步控制油缸5、第四位置传感器装置5a分布在移动横梁的一个对角,第二同步控制油缸3、第二位置传感器装置3a和第三同步控制油缸4、第三位置传感器装置4a分布在移动横梁1的另一个对角。
如图2所示,第一比例流量阀7、系统调压阀8、第二比例流量阀9、基准压力阀10、单向阀11、泵头循环阀12、油路P1进液阀13、油路P1排液阀14、油路P2进液阀15、油路P2排液阀16、油路P2安全阀17、油路P1安全阀18组成了控制阀组A,完全相同的各种控制阀组成了控制阀组B。控制阀组A、控制阀组B、第一油泵6、第二油泵19、油箱20以及各种管路组成了整个控制系统。该控制系统形成了P1、P2、P3、P4四路控制油路,油路P1和P3完全相同,油路P2和P4完全相同。
如图1和图2所示,第二移动横梁同步控制油缸3和第三移动横梁同步控制油缸4位于移动横梁1的一个对角上,第二移动横梁同步控制油3的上腔、第三移动横梁同步控制油缸4的下腔均和油路P1相通,第二移动横梁同步控制油3的下腔、第三移动横梁同步控制油缸4的上腔均和油路P2相同。若油路P1进油、油路P2回油,移动横梁1在该对角会产生一个逆时针的翻转力矩,若油路P1回油、油路P2进油,移动横梁1在该对角会产生一个顺时针的翻转力矩。活动横梁1在另外一个对角线的控制和该对角线相同。
如图1所示,各阀门的作用如下:泵头循环阀12用于控制油泵6的加载和卸荷。系统调压阀8用于调节系统压力,有高低两种压力,活动横梁加压补偿时用高压,空载补偿时用低压。基准压力阀10用于设定系统基准压力,系统封闭时用高压,系统补偿时用低压。第一比例流量阀7用于调节活动横梁加压补偿速度。第二比例流量阀9用于调节活动横梁1空载补偿速度。单向阀11防止回路油液方向流动。油路P1进液阀13控制油路P1的进液。油路P1排液阀14控制油路P1的排液。油路P2进液阀15控制油路P2的进液。油路P2排液阀16控制油路P2的排液。油路P1安全阀17用于限制油路P1的最高压力。油路P2安全阀18用于限制油路P2的最高压力。
下面以移动横梁1同步控制油缸B和同步控制油缸C所在的对角线为例来展现移动横梁1空载速度同步补偿的具体控制过程。
如图1和图2所示,移动横梁1空载向下,当移动横梁1处于水平状态时,泵头循环阀12打开,油泵6卸荷,油路P1进液阀13、油路P1排液阀14、油路P2进液阀15、油路P2排液阀16均关闭,油路P1、P2封闭,基准压力阀10设定为高压,第二移动横梁同步控制油缸3、第三移动横梁同步控制油缸4具有相同的基准压力(高)。当移动横梁1由于受力不均发生倾斜(如顺时针旋转时),第二移动横梁同步控制油缸3上腔和第三移动横梁同步控制油缸4下腔由于容积减小引起压力升高形成了逆时针平衡力矩,当倾斜值超出了给定值,油路P1进液阀13打开、油路P2排液阀16打开、泵头循环阀12关闭、系统调压阀8调节至低压,第一比例流量阀7给定最大值、第二比例流量阀9给定补偿值、基准压力阀10调节至低压,补偿控制系统开始空载补偿,第二移动横梁同步控制油缸3上腔和第三移动横梁同步控制油缸4下腔压力继续升高,逆时针平衡力矩增加,移动横梁1倾斜值减小。第二比例流量阀9给定补偿值根据倾斜值进行动态调节。当移动横梁1重新处于水平状态时,泵头循环阀12打开、油路P2排液阀16关闭、油路P1进液阀13关闭,补偿控制系统停止空载补偿,基准压力阀10调节至高压。
移动横梁1加压时,如果移动横梁1处于水平状态时,泵头循环阀12打开,油泵6卸荷,油路P1进液阀13、油路P1排液阀14、油路P2进液阀15、油路P2排液阀16均关闭,油路P1、P2封闭,基准压力阀10设定为高压,第二移动横梁同步控制油缸3、第三移动横梁同步控制油缸4具有相同的基准压力(高)。当移动横梁1受到锻造偏心力矩的作用而发生倾斜(如顺时针旋转时),第二移动横梁同步控制油缸3上腔和第三移动横梁同步控制油缸4下腔由于容积减小引起压力升高形成了逆时针平衡力矩,当倾斜值超出了给定值,油路P1进液阀13打开、油路P2排液阀16打开、泵头循环阀12关闭、系统调压阀8调节至高压,第二比例流量阀9给定最大值、第一比例流量阀7给定补偿值、基准压力阀10调节至低压,补偿控制系统开始加压补偿,第二移动横梁同步控制油缸3上腔和第三移动横梁同步控制油缸4下腔压力继续升高,逆时针平衡力矩增加,移动横梁1倾斜值减小。第一比例流量阀7给定补偿值根据倾斜值进行动态调节。当移动横梁1重新处于水平状态时,泵头循环阀12打开、油路P2排液阀16关闭、油路P1进液阀13关闭,补偿控制系统停止加压补偿,基准压力阀10调节至高压。
本发明在大型模锻压机的移动横梁运动过程中,精确的消除了移动横梁单个角的翘起,使移动横梁四个角同步移动,有效提高了模锻压机的锻造精度。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
在不冲突的情况下,本领域的技术人员可以根据实际情况将上述各示例中相关的技术特征相互组合,以达到相应的技术效果,具体对于各种组合情况在此不一一赘述。
需要说明,本发明实施例中所有方向性指示(诸如上、下、左、右、前、后……)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
以上所述,只是本发明的较佳实施例而已,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖性特点相一致的最宽的范围。依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本发明技术方案的范围内。
- 水改油模锻压机移动横梁速度同步补偿控制系统及方法
- 水改油模锻压机移动横梁速度同步补偿控制系统