用于呈现彩色影像的方法和设备
文献发布时间:2023-06-19 09:36:59
本申请是申请号为201880015039.7、名称为“用于呈现彩色影像的方法和设备”的中国发明专利申请的分案申请。
本申请主张以下权益:
1.2017.3.6申请的第62/467,291号临时申请;
2.2017.5.19申请的第62/509,031号临时申请;
3.2017.5.20申请的第62/509,087号临时申请;
4.2017.11.14申请的第62/585,614号临时申请;
5.2017.11.14申请的第62/585,692号临时申请;
6.2017.11.14申请的第62/585,761号临时申请;
及
7.2017.11.27申请的第62/591,188号临时申请。
本申请是关于2014.5.14申请的第14/277,107号申请(公开第2014/0340430号,现为美国专利号9,697,778);2015.9.25申请的第14/866,322号申请(公开第2016/0091770号);美国专利号9,383,623和9,170,468,2017.2.8申请的第15/427,202号申请(公开第2017/0148372号)及2017.5.11申请的第15/592,515号申请(公开第2017/0346989号)。这些共同未决申请和专利的所有内容(以下可称之为“电泳彩色显示器”或“ECD”专利),及下述所有其他美国专利及已公开且共同未决申请,均在此以参照方式并入本文。
本申请也是关于美国专利第5,930,026号;第6,445,489号;第6,504,524号;第6,512,354号;第6,531,997号;第6,753,999号;第6,825,970号;第6,900,851号;第6,995,550号;第7,012,600号;第7,023,420号;第7,034,783号;第7,061,166号;第7,061,662号;第7,116,466号;第7,119,772号;第7,177,066号;第7,193,625号;第7,202,847号;第7,242,514号;第7,259,744号;第7,304,787号;第7,312,794号;第7,327,511号;第7,408,699号;第7,453,445号;第7,492,339号;第7,528,822号;第7,545,358号;第7,583,251号;第7,602,374号;第7,612,760号;第7,679,599号;第7,679,813号;第7,683,606号;第7,688,297号;第7,729,039号;第7,733,311号;第7,733,335号;第7,787,169号;第7,859,742号;第7,952,557号;第7,956,841号;第7,982,479号;第7,999,787号;第8,077,141号;第8,125,501号;第8,139,050号;第8,174,490号;第8,243,013号;第8,274,472号;第8,289,250号;第8,300,006号;第8,305,341号;第8,314,784号;第8,373,649号;第8,384,658号;第8,456,414号;第8,462,102号;第8,514,168号;第8,537,105号;第8,558,783号;第8,558,785号;第8,558,786号;第8,558,855号;第8,576,164号;第8,576,259号;第8,593,396号;第8,605,032号;第8,643,595号;第8,665,206号;第8,681,191号;第8,730,153号;第8,810,525号;第8,928,562号;第8,928,641号;第8,976,444号;第9,013,394号;第9,019,197号;第9,019,198号;第9,019,318号;第9,082,352号;第9,171,508号;第9,218,773号;第9,224,338号;第9,224,342号;第9,224,344号;第9,230,492号;第9,251,736号;第9,262,973号;第9,269,311号;第9,299,294号;第9,373,289号;第9,390,066号;第9,390,661号;及第9,412,314号;及美国专利公开第2003/0102858号;第2004/0246562号;第2005/0253777号;第2007/0091418号;第2007/0103427号;第2007/0176912号;第2008/0024429号;第2008/0024482号;第2008/0136774号;第2008/0291129号;第2008/0303780号;第2009/0174651号;第2009/0195568号;第2009/0322721号;第2010/0194733号;第2010/0194789号;第2010/0220121号;第2010/0265561号;第2010/0283804号;第2011/0063314号;第2011/0175875号;第2011/0193840号;第2011/0193841号;第2011/0199671号;第2011/0221740号;第2012/0001957号;第2012/0098740号;第2013/0063333号;第2013/0194250号;第2013/0249782号;第2013/0321278号;第2014/0009817号;第2014/0085355号;第2014/0204012号;第2014/0218277号;第2014/0240210号;第2014/0240373号;第2014/0253425号;第2014/0292830号;第2014/0293398号;第2014/0333685号;第2014/0340734号;第2015/0070744号;第2015/0097877号;第2015/0109283号;第2015/0213749号;第2015/0213765号;第2015/0221257号;第2015/0262255号;第2015/0262551号;第2016/0071465号;第2016/0078820号;第2016/0093253号;第2016/0140910号;及第2016/0180777号。方便起见,以下将这些专利和申请统称为“MEDEOD”(Methods for Driving Electro-Optic Displays)申请。
技术领域
本发明是关于用于呈现彩色影像的方法和设备。更具体地说,本发明是关于在可利用的原色组有限且此有限组可能结构不佳情况下,用于半色调彩色影像的方法。此方法可缓解像素化面板模糊现象(即因显示像素与邻近像素相互作用导致显示像素是非预期的颜色),其可响应于包含温度、照明或功率水平等周遭环境而改变彩色电光(例如电泳)或类似显示的外观。本发明也是关于用于估计彩色显示的色域的方法。
背景技术
此处使用的术语“像素”以其在显示技术中的传统意义,指可产生显示器本身可展示的所有颜色的最小显示单元。
在印刷业中已通过将黑色墨水覆盖白色纸的各像素的变化比例而使用半色调呈现灰色调数十年。类似的半色调方案可并同CMY或CMYK彩色打印系统使用,其中彩色信道彼此独立变化。
但有许多彩色系统中的彩色信道无法彼此独立变化,顶多各像素可显示一受限组原色(以下将此类系统称之为“受限调色板显示器”或“LPD’s”);ECD专利彩色显示器即属此型。为产生其他颜色,须将原色空间抖动(dither)以产生正确的色觉。
标准抖动算法如误差扩散算法(其中由于将不同于理论要求颜色的特定颜色打印一像素而引入的“误差”会分布在相邻像素间,使得整体而言产生正确的色觉)可用于受限调色板显示器。关于误差扩散的文献众多;回顾可见Pappas、Thrasyvoulos N.于IEEETransactions on Image Processing6.7(1997):1014-1024中的“Model-basedhalftoning of color images”。
ECD系统呈现一定的特殊性,在设计供此类系统使用的抖动算法时须纳入考虑。像素间假影在此类系统中是常见特征。一种类型的假影是因所谓的“模糊现象”所致;在单色和彩色系统中,有由像素电极产生的电场影响电光介质的面积较像素电极本身具有面积更宽的倾向,使得实际上一个像素的光学状态外扩至部分相邻的像素区域。驱动相邻像素时经历的另一种串扰导致在异于像素本身所及的像素间区域中的最终光学状态,此最终光学状态是由像素间区域中经历的平均电场所致。单色系统也会受到相同的影响,但由于此类系统在彩色空间中是一维,故像素间区域常显示在两相邻像素状态中间的灰色状态,且此中间灰色状态并不会大幅影响该区域的平均反射率,或者其易于模型化为有效模糊现象。但在一彩色显示器中,像素间区域可显示在任一相邻像素均未呈现的颜色。
前述彩色显示中的问题对于色域以及由空间抖动原色预测的颜色的线性有严重后果。考虑利用出自ECD显示器的原色调色板的饱和红色与黄色的空间抖动图案来尝试产生所要的橘色。在无串扰下,可通过使用线性加色混合定律在远场中完美预测产生橘色所需的组合。由于红色与黄色在色域边界上,此经预测的橘色也应在色域边界上。但若前述效应在相邻红色与黄色像素间的像素间区域中产生(所谓的)蓝色带,则所得颜色将远比经预测的橘色更中性。此造成在色域边界中的“凹痕(dent)”,或者更精确地说,由于边界实际上是三维,扇贝形。因此,不仅单纯的抖动方式无法精确预测所需抖动,且在此情况下可能尝试产生无法获得的颜色,因为其在可达成的色域外。
理想上,希望能通过广泛图案测量或先进模型预测可达成的色域。若装置原色多或串扰误差相较于将像素量化为原色引入的误差大,则可能无法达成。本发明提供一种包括模糊现象/串扰误差模型的抖动方法,使得在显示器上实现的颜色较接近经预测颜色。此外,在所要颜色落在可实现色域外的情况下,该方法稳定了误差扩散,因为一般误差扩散当在抖动至原色的凸包外的颜色时将产生无限制的误差。
附图的图1是先前技术误差扩散方法的概略流程图,总的标示为100,如前述Pappas论文(IEEE Transactions on Image Processing 6.7(1997):1014-1024的“Model-based halftoning of color images”)。在输入102处,颜色值x
e
接着将误差值e
不幸地,当应用传统的扩散方法(如图1)于ECD和类似的受限调色板显示器时,所产生的严重假影可能产生导致所得影像不可用。例如阈值模块108处理误差经修改输入值u
本发明寻求提供一种呈现彩色影像的方法,可减少或消除因此类传统误差扩散方法导致的不稳定的问题。本发明提供一种图像处理方法,其经设计以减少抖动噪声,同时增加彩色显示器(尤其是彩色电泳显示器)的显著对比度与色域映对,以便允许在无严重假影下在显示器上显示更广泛的内容范围。
本发明也是关于用于在电子纸装置上呈现影像的硬件系统,尤其是电泳显示器上的彩色影像,例如具有主动矩阵背板的四粒子电泳显示器。通过并入来自电子纸装置的环境数据,一远程处理器可呈现影像数据供最佳观看。该系统另外允许运算密集型计算的分布,诸如判定对于环境条件和待显示影像最佳的彩色空间。
电子显示器一般包含一主动矩阵背板、一主控制器、一本地内存和一组通信与接口端口。主控制器经由通信/接口端口接收或自装置内存取得数据。一旦数据位于主控制器中,其即被转译为用于主动矩阵背板的一组指令。主动矩阵背板自主控制器接收这些指令并产生影像。在彩色装置的情况中,装置上色域运算可能需要具有增强运算能力的主控制器。如上述,彩色电泳显示器所用呈现方法通常是运算密集型,但如以下的详细描述,本发明本身即提供用以降低因呈现所增添运算负载的方法,呈现(抖动)步骤及整体呈现过程的其他步骤均仍可能增添装置运算处理系统上的主要负载。
影像呈现所需的增强运算能力减少电泳显示器在一些应用中的优势。特别言之,装置制造成本增加,当主控制器被配置为执行复杂的呈现算法时的装置耗能增加。此外,由控制器产生的额外热需要热管理。因此,至少在一些情况下,例如当极高分辨率影像或需于短时间内呈现大量影像时,可能需要将许多呈现计算移出电泳装置本身。
发明内容
因此,一方面,本发明提供一种用于产生彩色影像的系统。该系统包含一电光显示器,其具有像素和一色域,该色域包含原色的一调色板;及与该电光显示器通信的一处理器。该处理器配置成通过执行下列步骤呈现用于该电光装置的彩色影像:a)接收第一和第二组输入值,其代表待显示于该电光显示器上的影像的第一与第二像素的颜色;b)使该第一组输入值等于第一经修改组输入值;c)当在步骤b中产生的该第一经修改组输入值超出该色域时,将该第一经修改组输入值映射于该色域上,以产生第一经映射的经修改组输入值;d)将出自步骤b的第一经修改组输入值或出自步骤c的第一经映射的经修改组输入值与对应于该调色板的该等原色的一组原色值做比较,选择与具有最小误差的该原色对应的该组原色值,从而限定第一最佳原色值组,且输出该第一最佳原色值组做为该第一像素的颜色;e)以出自步骤b的该第一经修改组输入值或出自步骤c的第一经映射的经修改组输入值取代在该调色板中的第一最佳原色值,以产生一经修改调色板;f)计算出自步骤b的该第一经修改组输入值或出自步骤c的该第一经映射的经修改组输入值与出自步骤e的该第一最佳原色值组之间的差异以获得第一误差值;g)将该第一误差值加入该第二组输入值以产生第二经修改组输入值;h)当在步骤g中产生的该第二经修改组输入值超出该色域时,将该第二经修改组输入值映射于该色域上,以产生第二经映射的经修改组输入值;i)将出自步骤g的该第二经修改组输入值或出自步骤h的该第二经映射的经修改组输入值与对应于该经修改调色板的该等原色的该组原色值做比较,从该经修改调色板中选择对应于该原色的具有最小误差的该组原色值,从而限定第二最佳原色值组,且输出该第二最佳原色值组做为该第二像素的颜色。在一些实施例中,该处理器额外施行j)以出自步骤g的该第二经修改组输入值或出自步骤h的该第二经映射的经修改组输入值取代该经修改调色板中的该第二最佳原色值,以产生第二经修改调色板。该处理器配置成将各个像素的最佳原色值切换至电光显示器的控制器,由此将这些颜色显示在电光显示器的各个像素处。
另一方面,本发明提供一种在输出装置上呈现彩色影像的方法,该输出装置具有从原色调色板得到的色域,该方法包括:
a.接收输入值的序列,每个输入值代表待呈现的影像像素的颜色;
b.对于在第一输入值后的各输入值,将从先前处理的至少一个输入值得到的误差值加入输入值以产生一经修改输入值;
c.若在步骤b中产生的该经修改输入值超出该色域,则将该经修改输入映射在该色域上以产生经映射的经修改输入值;
d.对于在第一输入值后的各输入值,修改调色板以允许先前处理的至少一个像素的输出值e的实现,由此产生一经修改调色板;
e.比较出自步骤b的经修改输入值或出自步骤c的经映射的经修改输入值与该经修改调色板中的原色,选择具有最小误差的原色,并输出此原色做为用于像素的对应于正被处理的输入值的颜色值;
f.计算步骤e中使用的该经修改或经映射的经修改输入值与出自步骤e的原色输出间差异,以得出一误差值,并利用至少一部分此误差作为输入至步骤b的误差值,用于至少一个稍后处理的输入值;及
g.在至少一个稍后处理的输入值的步骤d中利用出自步骤e的原色输出值。
本发明的方法可进一步包括显示至少一部分原色输出作为在一显示器装置上的具有在本方法中使用的色域的影像。
在本方法的一种形式中,步骤c中的映射是沿着一线性RGB颜色空间中的亮度与色相恒定线而在标称色域上实现。在步骤e中的比较(“量化”)可在一线性RGB空间中利用最小欧几里得(Euclidean)距离量化器实现。或者,该比较可利用在前述第15/592,515号申请中所述重心阈值(选择与最大重心坐标相关的原色)而实现。但若利用重心阈值,在该方法的步骤c中使用的色域应为该方法的步骤e中使用的经修改调色板的色域,以免重心阈值给出不可预测和不稳定的结果。
在本方法的一种形式中,输入值是以对应于像素的光栅扫描的顺序处理,且在步骤d中调色板的修改允许输出值对应于先前经处理行中的像素,其与对应于正被处理的输入值的像素共享一边缘,并且在该相同行中的先前经处理像素与对应于正被处理输入值的像素共享一边缘。
使用重心量化的本方法的变体可总结如下:
1.利用德劳内(Delaunay)三角测量将色域分割为四面体;
2.判定装置色域的凸包;
3.对于超出色域凸包的颜色:
a.沿着一些线映射回到色域边界上;
b.计算该线与包括颜色空间的四面体的交点;
c.找出包围该颜色的四面体及相关重心权重;
d.由具有最大重心权重的四面体顶点判定抖动颜色。
4.对于凸包内的颜色:
a.找出包围该颜色的四面体及相关重心权重;
b.由具有最大重心权重的四面体顶点判定抖动颜色。
但本方法的此变体缺点在于同时需要德劳内三角测量与计算颜色空间的凸包两者,且这些计算造成大量的计算需求,达到这样的程度,就本技术状态而言,本变体实际上不可能在一独立处理器上使用。此外,影像质量通过使用色域包内的重心量化而妥协。因此,需要本方法的进一步变体,通过选择超出色域包的颜色使用的映射方法及在色域内的颜色使用的量化方法两者,可更有效率地计算并显现经改良的影像质量。
使用如上相同格式,本发明的方法进一步变体(以下可称之为“三角形重心”或“TB”方法)可总结如下:
1.判定装置色域的凸包;
2.对于超出色域凸包的颜色(EMIC):
a.沿着一些线映射回到色域边界上;
b.计算该线与构成色域表面的三角形的交点;
c.找出包围该颜色的三角形及相关重心权重;
d.由具有最大重心权重的三角形顶点判定抖动颜色。
3.对于凸包内的颜色(EMIC),判定各原色内“最接近的”原色,其中“最接近的”是以颜色空间中的欧几里得距离计算并采用最接近的原色作为抖动颜色。
换言之,本方法的三角形重心变体通过计算映射与色域表面的交点而实现方法的步骤c,且接着视EMIC(步骤b的产物)在色域内或外而以两种不同方式实现步骤e。若EMIC在色域外,则判定包围前述交点的三角形,判定用于此三角形各顶点的重心权重,且步骤e的输出是具有最大重心权重的三角形顶点。但若EMIC在色域内,则步骤e的输出是由欧几里得距离计算的最接近的原色。
如前述总结可见,TB方法不同于前面讨论的本方法的变体,在于根据EMIC在色域内或者色域外而应用不同的抖动方法。若EMIC在色域内,则利用最近相邻方法找出抖动颜色;因为抖动的颜色可以从任何原色中选择,而不是如在先前的重心量化方法中那样简单地从构成包围四面体的四个原色中选择,从而改善影像质量。(注意由于各原色常以高度不规则方式分布,故最近相邻有可能是非包围四面体顶点的原色。
另一方面,若EMIC在色域外,则沿一些线实现反向映射直到线与色域的凸包相交。由于仅考虑与凸包的交点而未考虑与颜色空间的德劳内三角测量的交点,故仅需计算映射线与包括凸包的三角形的交点。这大幅降低本方法的计算负载并确保在色域边界上的颜色现在由最多三个抖动颜色表示。
TB方法较佳在相对型颜色空间中施行,因此确保色域上的映射保留EMIC色相角;这代表对‘291方法的改善。此外,为达最佳结果,应利用感知相关颜色空间计算欧几里得距离(用以识别落在色域内的EMIC的最近相邻)。虽然采用(非线性)孟赛尔(Munsell)颜色空间可能看起来符合所期,但线性模糊现象模型、像素值和标称原色所需转换增添了非必要的复杂性。反之,通过对相对型空间施行线性转换可获得优良结果,其中亮度L与两色度分量(O1,O2)相互独立。自线性RGB空间的线性转换给定如下:
在此实施例中,在步骤2(a)中实现映射所沿的线可定义为连接输入颜色u与V
V
及w、b是在相对空间中的个别白色点与黑色点。标量α取自
其中下标L是指亮度分量。换言之,所采用的映射线是连接EMIC至消色差轴上具相同亮度点的线。若适当选择颜色空间,则此映射保留原始颜色的色度角;相对颜色空间满足此需求。
然而根据经验发现即使是本TB方法的目前较佳实施例(以下参考方程式(4)至(18)描述),仍会残留一些影像假影。这些假影一般称之为“虫”,其具有因诸如TB方法的误差扩散机制中固有的误差累积过程引入的水平或垂直结构。虽然这些假影可通过加入少量噪声于选择原色输出颜色(所谓的“临界调制”)的过程中而移除,但此可造成不可接受的粒状影像。
如上述,TB方法采用不同的抖动算法,其根据EMIC是否落在色域凸包内或外。大部分残余假影是因在凸包外的EMIC重心量化而起,因为所选抖动颜色仅可为关联于包围经映射颜色的三角形顶点的三者之一;所得抖动图案的变异数因此远大于针对凸包内EMIC所得,其中可自原色中任一者选择抖动颜色,一般数量远大于三。
因此,本发明提供TB方法的进一步变体,以减少或消除残余抖动假影。这通过调变在凸包外的EMIC的抖动颜色的选择而实现,其中利用经特殊设计而具感知愉悦噪声性质的蓝色噪声屏蔽。为方便起见,以下将此进一步变体称之为本发明方法的“蓝色噪声三角形重心”或“BNTB”变体。
因此,本发明还提供本发明的一种方法,其中步骤c是通过计算映射与色域表面的交点而实现,且步骤e是通过以下方式实现:(i)若步骤b的输出在色域外,则判定包围前述交点的三角形,判定对于此三角形各顶点的重心权重,及将因而计算出的重心权重与在像素位置处的蓝色噪声屏蔽值做比较,步骤e的输出是重心权重的累积和超出屏蔽值的三角形顶点的颜色;或(ii)若步骤b的输出在色域内,则步骤e的输出是由欧几里得距离计算出的最接近的原色。
本质上,BNTB变体应用临界调制于凸包外EMIC的抖动颜色选择,而在凸包内EMIC的抖动颜色维持不变。可使用除蓝色噪声屏蔽外的临界调制技术。因此,下述将聚焦于凸包外EMIC处理的变化,至于本方法的其他步骤细节则请读者参考先前讨论。已发现通过蓝色噪声屏蔽引入临界调制可移除TB方法中可见的影像假影,产生优良的影像质量。
本方法中采用的蓝色噪声屏蔽可属以下类型:Mitsa,T.,与Parker,K.J.,在J.Opt.Soc.Am.A,9(11),1920(1992.11)中的“Digital halftoning technique using ablue-noise mask”,尤其是其中的图1。
虽然BNTB方法明显减少TB所经历的抖动假影,根据经验发现部分抖动图案仍呈现相当的粒状及特定颜色,例如在皮肤色调所发现的,因抖动过程而失真。这是针对位于色域边界外的EMIC采用重心技术的直接结果。由于重心方法仅允许至多选择三原色,抖动图案变异数高,且此显示为可见假影;此外,由于原色选择的固有限制,有些颜色变为人为饱和。这具有破坏由上述方程式(2)和(3)定义的映射运算符的色相保留性质的效果。
因此,本发明的方法的进一步变体进一步修改TB方法以减少或消除残余抖动假影。这是通过舍弃一起使用重心量化并且通过仅利用色域边界颜色的最近相邻方式量化在凸包外的EMIC所采用的经映对颜色。为方便起见,以下将本方法的此变体称之为“最近相邻色域边界颜色”或“NNGBC”变体。
因此,在NNGBC变体中,本发明的方法的步骤c通过计算映射与色域表面的交点而实现,且步骤e通过以下方式实现:(i)若步骤b的输出在色域外,则判定包围前述交点的三角形,判定位于凸包上的原色,并且步骤e的输出是位于由欧几里得距离计算出的凸包上的最接近的原色;或(ii)若步骤b的输出在色域内,则步骤e的输出是由欧几里得距离计算出的最接近的原色。
实质上,NNGBC变体应用“最近相邻”量化在色域内的颜色和色域外颜色的映射两者,除了在前者所有原色均可用,而后者仅有在凸包上的原色可用。
已发现本发明的呈现方法中使用的误差扩散可用于减少或消除显示器中的缺陷像素,例如即使重复施加适当的波形时仍不变色的像素。实质上,这是通过侦测缺陷像素且超越正常原色输出选择并将各缺陷像素的输出设定为缺陷像素实际显现的输出颜色。本呈现方法的误差扩散特征一般是在经选择输出原色与相关像素处的影像颜色间有差异时运作,在具缺陷像素的情况下,将在缺陷像素的实际颜色与相关像素处的影像颜色间有差异且以常见方式散布此差异至相邻像素时运作。已经发现,这种缺陷隐藏技术可大幅减少缺陷像素的视觉影响。
因此,本发明也提供已描述的本呈现方法的一种变体(为方便起见,以下称之为“缺陷像素隐藏”或“DPH”变体),其进一步包括:
(i)识别无法正确切换的显示器的像素,以及由这种缺陷像素呈现的颜色;
(ii)在各缺陷像素的情况下,自步骤e输出缺陷像素实际呈现的颜色(或至少与此颜色部分近似);及
(iii)在各缺陷像素的情况下,在步骤f中计算经修改或经映射的经修改输入值与缺陷像素实际呈现的颜色间的差异(或至少与此颜色部分近似)。
可以理解,本发明的方法依赖于对影像正被呈现的装置的色域的正确理解。如下更详细讨论,一误差扩散算法可导致输入影像中的颜色无法实现。方法如本发明的TB、BNTB及NNGBC方法的一些变体,通过映射误差修改输入值回到标称色域上以限制误差值的成长而处理色域外输入颜色,针对标称与可实现的色域间的小差异可良好运作。但对于较大误差,会在抖动算法的输出中发生可见扰动图案与色偏。因此,在执行来源影像的色域映对时需要更佳的对可达成色域的非顶点估计,使得误差扩散算法总是能达成其目标颜色。
因此,本发明的另一方面(为方便起见,以下称之为本发明的“色域划分”或“GD”方法)提供可达成色域的估计。
用于估计一可达成色域的GD方法可包含五个步骤,即:(1)测量一测试图案以推出在邻近原色间串扰相关信息;(2)将出自步骤(1)的测量转换为一模糊现象模型,其预测任意原色图案所显示的颜色;(3)利用在步骤(2)中推出的该模糊现象模型预测实际显示图案颜色,其一般是用以在该等原色的凸包(亦即标称色域表面)上产生颜色;(4)利用在步骤(3)中所做的预测描述该可实现的色域表面;及(5)利用在步骤(4)中推出的该可实现的色域表面,通过映射输入(来源)颜色呈现一颜色组。
该GD处理的步骤(5)的颜色呈现处理可为本发明的任何颜色呈现处理。
将会理解的是,前述颜色呈现方法可仅构成用于在彩色显示器(尤其是彩色电泳显示器)上呈现彩色影像的整体呈现处理的部分(一般为最终部分)。特别地,本发明的方法之前可依序经历(i)一去伽玛(degamma)操作;(ii)HDR型处理;(iii)色相修正及(iv)色域映射。相同的操作序列可与除本发明之外的抖动方法使用。为方便起见,以下将此整体呈现处理称之为本发明的“去伽玛/HDR型处理/色相修正/色域映射”或“DHHG”方法。
本发明的另一方面通过将许多呈现计算移出设备本身来提供对由电泳设备的过度计算需求引起的上述问题的解决方案。利用依本发明的该方面的系统可于电子纸上提供高质量影像,同时仅需用于通信、最小影像快取及装置本身显示驱动器功能的资源。因此,本发明大幅降低显示器的成本和体积。此外,云端计算和无线网络的普及允许本发明的系统可在最少公用设施或其他基础设施更新下广泛开展。
因此,在另一方面本发明提供一种影像呈现系统,其包括一电光显示器,该电光显示器包括一环境情况传感器;及一远程处理器,其经由一网络连接至该电光显示器,该远程处理器被配置成接收影像数据,及经由该网络接收来自该传感器的环境情况数据,在所接收的环境情况资料下呈现要显示于该电光显示器上的影像数据,由此产生经呈现影像数据,并且将该经呈现影像数据经由网络传输至电光显示器。
为方便起见,以下将本发明的这一方面(包含下述额外影像呈现系统及插接站)称之为“远程影像呈现系统”或“RIRS”。该电光显示器可包括一层电泳显示材料,其包括设置在一流体中且在施加电场于该流体时可经由该流体移动的带电粒子,该电泳显示材料设置在第一与第二电极间,该电极的至少一者是透光的。该电泳显示材料包括四种具有不同颜色的带电粒子。
本发明进一步提供一种影像呈现系统,其包含一电光显示器、一本地主机和一远程处理器,均通过网络连接,该本地主机包括一环境情况传感器且配置成经由该网络提供环境情况数据至该远程处理器,及该远程处理器配置成接收影像数据,经由该网络接收来自该本地主机的该环境情况数据,在该所接收的环境情况数据下呈现该影像数据用于显示于电子纸显示器上,藉此产生经呈现影像数据,及传输该经呈现影像数据。该环境情况数据可包含温度、湿度及入射于该显示器上的光的照度,及入射于该显示器上的光的色谱。
在任一上述影像呈现系统中,电光显示器可包括一层电泳显示材料,其包括设置在一流体中且在施加电场于该流体时可经由该流体移动的带电粒子,该电泳显示材料设置在第一与第二电极间,该电极的至少一者是透光的。此外,在上述系统中,该本地主机可以传输影像数据至该远程处理器。
本发明也提供一种插接站,其包括用于与一电光显示器耦合的接口,该插接站配置成经由网络接收经呈现影像数据,及更新耦合至该插接站的电光显示器上的影像。该插接站可进一步包括电源,其经配置成提供多个电压至耦合至该插接站的电光显示器。
附图说明
如前述,附图的图1是在前述Pappas论文中所述先前技术误差扩散方法的概略流程图。
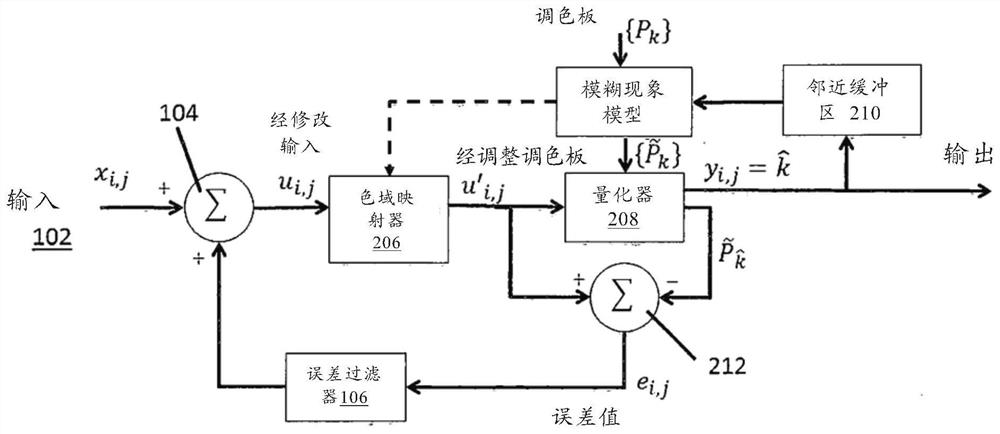
图2是本发明的方法的概略流程图。
图3示出可用于本发明的BNTB变体的蓝色噪声屏蔽。
图4示出使用本发明的TB方法处理的影像,并说明了存在虫状缺陷。
图5示出与图4相同的影像,差别在于其是使用BNTB方法处理且不存在虫状缺陷。
图6示出与图4及图5相同的影像,差别在于其是使用本发明的NNGBC方法处理。
图7是禁止凹陷的色域模型的示例。
图8A与图8B示出在一给定色相角处的一平面与来源及目标色域的交点。
图9示出来源与目标色域边界。
图10A与图10B示出依据本发明的膨胀/压缩操作获得的平滑化目标色域。
图11是依据本发明用于电泳显示的整体彩色影像呈现方法的概略流程图。
图12是用于输入色域三原色(R,G,B)及输出色域三原色(R’,G’,B’)的一系列取样点的代表图。
图13说明了将一单位立方体分解为六个四面体。
图14是显示可由本发明的方法驱动且可用于本发明的呈现系统中的一电泳介质中的各粒子的位置的概略剖面,所显示的电泳介质是当显示黑色、白色、三减法原色及三加法原色。
图15示出可用于驱动图14的四色电泳介质至一示例性颜色状态的波形。
图16示出本发明的远程影像呈现系统,电光显示器藉此与远程处理器相互作用。
图17示出本发明的RIRS,电光显示器藉此与远程处理器及本地主机相互作用。
图18示出本发明的RIRS,电光显示器藉此经由一插接站与远程处理器相互作用,该插接站亦充作一本地主机并可包含一电源,以将电光显示器充电并使之更新而显示经呈现影像数据。
图19是本发明的包含各附加组件的更清晰的RIRS的方块图。
图20A是显示暗缺陷的成像显示的照片。
图20B是显示部分暗缺陷的图20A的部分显示特写。
图20C是与图20A类似但具有由本发明的误差扩散方法修正的影像的照片。
图20D是类似于图20B但显示图20C的部分影像的特写。
具体实施方式
本发明的方法的一较佳实施例在附图的图2中示出,其是关于图1的一概略流程图。如图1所示先前技术方法,图2所示方法始于一输入102,在该输入102处将颜色值x
如前述Pappas论文,在基于模型的误差扩散中众所周知的议题在于该处理并不稳定,因为假设输入影像落在原色(即色域)的(理论上的)凸包中,但实际可实现的色域可能因点重迭造成的色域损失而较小。因此,误差扩散演算可能会尝试实现实际上无法真正实现的颜色且误差持续随各相继“修正”而增长。已提出通过剪除或限制该误差来控制此问题,但此会导致其他误差。
本方法遭受相同问题。理想解决方式将在施行来源影像的色域映对时具有可达成色域的较佳非顶点估计,使得误差扩散算法总是可达成其目标颜色。可以从模型本身近似得出或依经验判定之。但没有任何修正方法是完美的,且因此将一色域映射方块(色域映射器206)纳入本方法的较佳实施例中。此色域映射器206类似于前述第15/592,515号申请中所提,但用途不同;在本方法中,色域映射器是用以维持误差受限,但相较于先前技术中将误差截断更为自然。代之以,将误差经修改的影像连续剪切至标称色域边界。
色域映射器206经提供以处理即使输入值x
经修改输入值u’
本发明的方法的目前较佳实施例采用标准弗洛依德-斯坦伯格(Floyd-Steinberg)误差过滤器并以光栅顺序处理像素。假设按现有技术,显示器从上到下从左到右处理,使用经考虑的像素的上方及左方的主要相邻计算模糊现象或其他像素间效应是合乎逻辑的,因为这两个相邻已经过判定。按此方式,由邻近像素导致的所有模型化误差均经考虑,因为当该等邻近像素被访问时,右方及下方相邻串扰被考虑在内。若模型仅考虑上方及左方相邻,则经调整组原色须为该等相邻的状态及所考虑原色的函数。最简单方式是假设模糊现象模型具加成性,即因左方相邻造成的色偏和因上方相邻造成的色偏是相互独立且具加成性的。在此情况下,仅需判定“N取2”(等于N*(N-1)/2)模型参数(色偏(colorshift))。对于N=64或更小者,这些可通过自所有可能原色对的棋盘式图案的色度测量减去来自测量的理想混合定律值来估计。
举一特定示例,考虑具有32个原色的显示器的情况。若仅考虑上方及左方相邻,对于32原色而言,一给定像素具有496个可能的邻近组原色。因模型为线性,故仅需储存这496个色偏,因两相邻的加成效应可在无过多负载下在执行期间产生。故例如若未经调整原色组包括(P1...P32)且你目前的上方、左方相邻是P4和P7,则经修改的原色(P
P
.......
P
其中dP
当然可能有更复杂的像素间相互作用模型,例如已知有非线性模型,考虑角落(对角)相邻的模型,或采用非因果相邻的模型,其中由于知道了其更多的邻居,为其更新在各像素处的色偏更新。
量化器208比较经调整输入u’
量化器208的y
e
且以与以上参考图1所述相同方式将此误差信号传送至误差过滤器106上。
TB方法
如上述,本方法的TB变体概述如下:
1.判定装置色域的凸包;
2.对于超出色域凸包的颜色(EMIC):
a.沿着一些线映射回到色域边界上;
b.计算该线与构成色域表面的三角形的交点;
c.找出包围该颜色的三角形及相关重心权重;
d.由具有最大重心权重的三角形顶点判定抖动颜色。
3.对于凸包内的颜色(EMIC),判定各原色内“最接近的”原色,其中“最接近的”是以颜色空间中的欧几里得距离计算并采用最接近的原色作为抖动颜色。
现将描述以具运算效率、硬件友好方式施行此三步骤算法的较佳方法,但仅是例示,因为所述特定方法的多个变体对熟悉此数字成像技术者将是显而易见的。
如已指出的,算法的步骤1是用以判定EMIC(以下标注为u)在色域的凸包内或外。因此,考虑一组经调整原色PP
则点u超出凸包,其中“·”代表(向量)内积且其中法向量
其中
若发现u超出凸包之外,则须定义映射运算符,将u映射回到色域表面上。较佳映射运算符已由以上方程式(2)与(3)定义。如前所述,此映射线是连接u与具相同亮度的消色差轴上点的线。此线的方向为
d=u-V
故该映射线的方程式可写为
u=V
其中0≤t≤1。现考虑凸包中的第k个三角形,并以其边
其中
自重心坐标与线长度t的定义而言,当且仅当:
0≤t
p
q
p
则该线与凸包中的第k个三角形相交。若参数L定义为:
则距离t
因此,在以上方程式(4)中用以判定EMIC在凸包内或外的参数亦可用于判定颜色与和映射线相交的三角形的距离。
重心坐标的计算仅略微困难。自简单几何:
其中
且“×”是(向量)外积。
概言之,为施行前述三步骤算法的较佳程式所需的运算是:
(a)利用方程式(5)判定一颜色在凸包内或外;
(b)若该颜色在凸包外,则利用方程式(10)-(14),通过测试构成该包的k个三角形的每一个,判定在凸包的哪一个三角形上映射该颜色。
(c)对于其中方程式(10)的所有为真的三角形,通过下式计算映射点u’:
u′=V
并通过下式计算其重心权重:
α
接着如前述将这些重心权重用于抖动。
若采取由方程式(1)定义的类似相对(opponent-like)颜色空间,则u由一照度分量与两色度分量组成,u=[u
可写成:
通过展开外积并将经估计为零的项目消除,得出
方程式(18)对硬件的计算负载甚微,因为仅需乘法与减法。
因此,可将本发明的一有效率的、硬件友好的抖动TB方法概述如下:
1.判定(离线)装置色域的凸包及包括该凸包的三角形的对应边与法向量;
2.对于在凸包中的所有k个三角形,计算方程式(5)以判定EMIC u是否落在凸包外;
3.对于落在凸包外的一颜色u:
a.对于在凸包中的所有k个三角形,计算方程式(12)、(18)、(2)、(3)、(6)及(13);
b.判定满足方程式(10)所有条件的该三角形j;
c.对于三角形j,计算方程式(15)与(16)的经映射颜色u’及相关重心权重;并选择与最大重心权重对应的顶点作为抖动颜色;
4.对于凸包内的颜色(EMIC),判定原色中“最接近的”原色,其中“最接近的”是以颜色空间中的欧几里得距离计算并采用最接近的原色作为抖动颜色。
自前述可见本方法的TB变体较先前讨论的变体具有远少得多的运算需求,因此允许在相对适中的硬件下使用必要的抖动。
但可能需要以下的进一步运算效率:
对于色域外颜色,仅就小量候选边界三角形考虑运算。与先前考虑所有色域边界三角形的方法相较,这是显著改善;对于色域内颜色,利用二元树计算“最近相邻”操作,其中采用预计算的二元空间分割。这改善了自O(N)至O(logN)的运算时间,其中N是原色数。
对于点u超出凸包的情况,已给定于以上方程式(4)中。如前所述,可预计算顶点v
且因此我们可知仅有t’
自点u至其与一三角形k相交点的距离给定为t
V
且w、b是在相对空间中的个别白色点与黑色点。标量α可自下式求得
其中下标L是指亮度分量。换言之,该线定义为连接输入颜色与消色差轴上具相同亮度点。此线的方向是由以上方程式(6)给定,且该线的方程式可写为以上方程式(7)。在凸包上的一个三角形内的一点的表达式,此点的重心坐标及映射线与一特定三角形相交的条件,已参考以上方程式(9)-(14)讨论。
对于已讨论的原因,希望避免实行以上方程式(13),因为需要除法运算。亦如前述,若k个三角形中任一个t’
0>p′
且
与先前方法相较,其显著减少决定逻辑,因为t’
概言之,接着一最佳方法利用方程式(5A)找出t’
这是简单的标量除法。此外,仅关注最大重心权重max(α
max(α
且利用此选择对应于待输出颜色的三角形j的顶点。
若所有的t’
通过针对经模糊现象修改原色空间PP的每一者,通过预计算二元空间分割可缓解(若未消除)此瓶颈,接着利用二元树架构判定在PP中u的最近原色。虽然此需要一些前置投入与数据储存,但减少了自O(N)至O(logN)的最近相邻运算。
因此,可将一高效率的、硬件友好的抖动方法概述(利用与先前相同的术语)如下:
1.判定(离线)装置色域的凸包及包括该凸包的三角形的对应边与法向量;
2.对于t’
a.对于k个三角形,找出满足以下条件的三角形j
3.对于落在凸包外的一颜色u:
a.对于在凸包中的所有k个三角形,计算方程式(12)、(18)、(2)、
(3)、(6)及(13);
b.判定满足方程式(10)所有条件的该一三角形j;
c.对于三角形j,自方程式(15)、(54)与(55)计算经映射颜色u’及相关重心权重,并选择与最大重心权重对应的顶点作为抖动颜色;
4.对于凸包内的颜色(EMIC)(所有t’
BNTB方法
如前述,BNTB方法异于上述TB之处在于应用临界调制于凸包外EMIC的抖动颜色选择,而在凸包内EMIC的抖动颜色维持不变。
BNTB方法的一较佳形式是上述四步骤较佳TB方法的一修改;在BNTB修改中,步骤3c被以下的步骤3c与3d取代:
c.对于三角形j,自方程式(15)与(16)计算经映射颜色u’与相关重心权重;及
d.比较因而计算的重心权重与在像素位置处的蓝色噪声屏蔽值,并选择重心权重累积和超出屏蔽值处的一顶点作为抖动颜色。
如熟悉成像技术者所熟知的,临界调制仅是通过在颜色选择方法中应用空间变化随机化的改变抖动颜色选择的方法。为减少或避免在经处理影像中的粒状情况,希望应用优先成形光谱特性的噪声,例如图1中所示蓝色噪声抖动屏蔽Tmn,其是值在0-1范围的M xM矩阵。虽然M可变(且确实可采用矩形而非正方形屏蔽),但为了硬件施行效率考虑,将M设定为128较为便利,且影像的像素坐标(x,y)与屏蔽指数(m,n)相对关系为:
m=mod(x-1,M)+1
n=mod(y-1,M)+1 (19)
使得抖动屏蔽可有效在影像上平铺。
临界调制利用了重心坐标和机率密度函数(例如蓝色噪声函数)总和为一的事实。因此,可以通过将重心坐标的累积和与给定像素值处的蓝色噪声屏蔽的值进行比较来实现使用蓝色噪声屏蔽的临界调制,以确定三角形顶点并因而确定抖动颜色。
如上所述,对应于三角形顶点的重心权重给定为:
α
使得这些重心权重的累积和(标注为“CDF”)给定为:
CDF=[1-p
且顶点v及CDF首先超出在相关像素处的屏蔽值的对应抖动颜色给定为:
v={v;CDF(v)≥T
希望本发明的BNTB方法可于标准硬件如现场可编程门阵列(FPGA)或专用集成电路(ASIC)上有效率地施行,为达此目的,重要的是将抖动计算中所需除法运算数降至最低。为达此目的,可将方程式(16)改写为:
且方程式(20)可改写为:
或者以L
CDF′=[L
用于选择顶点v及CDF首先超出在相关像素处的屏蔽值的对应抖动颜色的方程式(21)成为:
v={v;CDF′(v)≥T
使用方程式(25)略为复杂处仅在于CDF’与L
可利用本发明的方法达成的影像质量改善,通过图2与图3的比较显而易见。图2显示由所述较佳四步骤TB方法抖动的影像。将可见到影像经圈选区域中存在虫状缺陷。图3显示由较佳BNTB方法抖动的相同影像,则不存在此类影像缺陷。
自前述将可见到BNTB方法提供用于彩色显示的抖动方法,提供较TB方法好的抖动影像质量,且易于在FPGA、ASIC或其他定点硬件平台上达成。
NNGBC方法
如前所述,NNGBC方法通过仅采用色域边界颜色的一最近相邻方式量化用于凸包外的EMIC的经映射颜色,同时通过利用所有可得原色的最近相邻方式量化凸包内的EMIC。
NNGBC方法的一较佳形式可描述为上述四步骤TB方法的一修改。步骤1经修改如下:
1.判定(离线)装置色域的凸包及包括该凸包的三角形的对应边与法向量。同样离线地,找出N个原色中的M个边界色P
且步骤3c改成:
c.对于三角形j,计算经映射颜色u’,并自M个边界色P
本发明的方法的较佳形式非常接近上述较佳四步骤TB方法,例外处在于无需利用方程式(16)计算重心权重。取而代之的是,抖动颜色v经选择为集合P
v=argmin
由于边界颜色数M常远小于原色总数N,故方程式(26)所需计算相对较快。
就本发明的TB及BNTB方法而言,希望NNGBC方法可于独立硬件如现场可编程门阵列(FPGA)或专用集成电路(ASIC)上有效率地施行,且为达此目的,重要的是将抖动计算中所需除法运算数最小化。为达此目的,以上方程式(16)可重写为已描述的方程式(22)的形式,且方程式(26)可以类似方式为之。
可利用本发明的方法达成的影像质量改善,通过图4、5与6的比较显而易见。如前所述,图4显示通过较佳TB方法抖动影像,将可见到影像经圈选区域中存在虫状缺陷。图5显示由较佳BNTB方法抖动的相同影像;虽然较图4的影像具显著改善,但在各点上仍呈粒状。图6显示由本发明的NNGBC方法抖动的相同影像,粒状大幅减少。
自前述将可见到NNGBC方法提供用于彩色显示的抖动方法,一般提供较TB方法好的抖动影像质量,且易于在FPGA、ASIC或其他定点硬件平台上达成。
DPH方法
如前述,本发明提供已描述的这些呈现方法的一种缺陷像素隐藏或DPH,其进一步包括:
(i)识别无法正确切换的显示器的像素,及由此等缺陷像素呈现的颜色;
(ii)在各缺陷像素的情况下,自步骤e输出缺陷像素实际呈现的颜色(或至少与此颜色部分近似);及
(iii)在各缺陷像素的情况下,在步骤f中计算经修改或经映射的经修改输入值与缺陷像素实际呈现的颜色间的差异(或至少部分近似于此颜色)。
参照“部分近似于此颜色”是指缺陷像素实际呈现的该颜色可能远超出显示色域,且可能因而使得误差扩散方法不稳定的可能性。在此情况下,可能希望通过前述映射方法之一趋近缺陷像素的实际颜色。
由于空间抖动方法如本发明中所述者寻求传递给定一组个别原色的一平均颜色的意象,像素与其预期颜色的偏差可通过其相邻的适当修改而补偿。将此论证纳入其逻辑,清楚可见缺陷像素(诸如陷于特定颜色的像素)亦可通过抖动方法以非常直接的方式补偿。但并非设定像素相关输出颜色为抖动方法所判定的颜色,而是将输出颜色设定为缺陷像素的实际颜色,使得抖动方法通过传播所得误差至相邻像素而自动考虑在该像素处的缺陷。抖动方法的此变体可与光学测量耦合以包括一完整的缺陷像素测量与修复过程,其可总结如下。
首先,光学检测显示器缺陷;此可如拍摄具有一些登记标示的高分辨率照片一样容易,并自光学测量判定缺陷像素的位置及颜色。陷于白色或黑色中的像素可仅通过检测经个别设定为全黑色及白色时的显示而定位。但更一般而言,可在显示经设定为全白色与全黑色时测量各像素,并判定各像素差异。此差异低于某些预定临限的任何像素均可视为“陷于”及缺陷。为定位其中一像素被“锁定”为其相邻之一的状态的像素,设定显示为黑色与白色的单一像素宽的线的图案(利用具有个别沿着列与行行进的线的两个个别影像),并找寻在该线图案中的误差。
接着建立缺陷像素及其颜色的查询表,并将此LUT转换为抖动引擎;为达此目的,以软件或硬件施行抖动均无差异。抖动引擎以标准方式施行色域映对与抖动,除了对应于缺陷像素位置的输出颜色被迫为其缺陷颜色。接着抖动算法自动通过定义补偿其呈现。
图20A-20D示出实质上隐藏暗缺陷的本发明的DPH方法。图20A显示含暗缺陷的影像全图,及图20B是显示部分暗缺陷的特写。图20C是类似于图20A但显示通过DPH方法修正后的影像,而图20D是类似于图20B但显示经DPH修正影像的特写。自图20D将易于看出抖动算法具有围绕每个缺陷经点亮像素,以维持该区域的平均亮度,因此大幅减少缺陷的视觉冲击。熟悉电光显示器技术者将显而易见该DPH方法易于扩展至明亮缺陷,或其中一像素取代其相邻颜色的邻近像素缺陷。
GD方法
如前述,本发明提供用于估计一可达成色域的色域划分方法包含五个步骤,亦即:(1)测量测试图案以获得在邻近原色间串扰相关信息;(2)将出自步骤(1)的该等测量转换为一模糊现象模型,其预测任意原色图案所显示的颜色;(3)利用在步骤(2)中获得的该模糊现象模型(即标称色域表面)预测实际显示图案颜色,其一般是用以在该等原色的凸包上产生颜色;(4)利用在步骤(3)中所做的该等预测描述该可实现的色域表面;及(5)利用在步骤(4)中获得的该可实现的色域表面于颜色呈现过程的色域映对阶段中,该颜色呈现过程将输入(源)颜色映对至装置颜色。
本方法的步骤(1)与(2)可依循上述结合本发明的基本颜色呈现方法的过程。具体地,对于N个原色,显示及测量棋盘式图案的“N取2”个数。自理想颜色混合定律预期的标称值与实际测量值间的差异归因为边缘交互作用。此误差被视为边缘密度的线性函数。藉此方式,原色的任何像素斑块的颜色均可通过整合这些缺陷于图案中所有边缘上而预测。
本发明的步骤(3)考虑可能预期在色域表面上的抖动图案并计算通过模型预测的实际颜色。概言之,色域表面是由三角面组成,其中的顶点是在线性颜色空间中的原色。若不具模糊现象,则在这些三角形各者中的这些颜色接着可通过相关顶点原色的适当比例再造。但有许多图案会被制成具有此原色修正比例,由于需列举原色相邻性类型,使得所使用的的图案对于模糊现象模型是关键。为了解此部分,考虑采用50%的P1与50%的P2的两极端情况。在一极端情况中,可采用P1与P2的棋盘式图案,在此情况下,P1|P2边缘密度最大化,导致与理想混合的最大可能偏差。在另一极端情况中,有两个极大的斑块,一是P1,另一是P2。其具有随着斑块尺寸增加而趋近于零的P1|P2相邻性密度。这第二种情况将再造近乎正确颜色,即使存在模糊现象下亦然,但因图案的粗糙性而将为视觉上不可接受。若可于具有相同颜色的丛集化像素中采用半色调算法,则可能在这些极端状况间合理选择一些折衷方案作为可实现的颜色。但实际上,当采用误差扩散时,这类丛集化导致不良虫状假影,且此外,大多数有限的调色板显示器的分辨率,尤其是彩色电泳显示器,使得丛集化变得明显且分散注意力。因此,一般希望采用最分散的可行图案,即使此意味着会消除可通过丛集化获得的一些颜色。在显示器技术及半色调算法中的改善可实际呈现较少可用的保守性图案模型。
在一实施例中,令P
∝
其中∝
现令Δ
不失一般性,假设
∝
其定义小平面上的子三角形,其角如下
对于原色的最大分散像素群,我们可评估在每个角处的经预测颜色为
P
通过假设图案可经设计以在这些角间线性改变边缘密度,我们现具有针对色域边界的子小平面的模型。由于具有6种顺序∝
应了解可实行其他方式。例如可采用随机原色取代模型,其较前述者较少分散。在此情况下,各类型的边缘的比例正比于其机率,亦即P1|P2边缘的比例是由乘积∝
另一方式并未依循前述范例而是采用经验方式,实际采用模糊现象补偿抖动算法(利用出自步骤1、2的模型)判定何种颜色应自色域模型排除。此可通过关闭抖动算法中的稳定化并接着尝试抖动单一颜色的一恒定斑块而达成。若符合不稳定标准(亦即脱逃误差项),则此颜色被排除在色域外。通过始于标称色域,可利用分治方式判定可实现的色域。
在GD方法的步骤(4)中,这些子小平面的各者是以三角形表示,其顶点有序化使得右手定则将依向内/向外的经选择惯例指出法向量。所有这些三角形的集合构成表示可实现的色域的新的连续表面。
在一些情况下,该模型将预测未在标称色域中而可利用模糊现象实现的新颜色;但就减少可实现的色域而言,大部分的效应是负面的。例如模糊现象模型色域可显现深凹面,亦即深入标称色域中的某些颜色实际上无法再现于显示器上,例如图7中所示。(图7中的顶点给定于下表1中,而构成凸表面的三角形则详细地给定于下表2)。
表1:在L*a*b*颜色空间中的顶点
此可导致如下述色域映对的一些困惑。此外,所产生的色域模型会自我相交且因而不具简单拓朴性质。由于上述方法仅于色域边界操作,即使实际上可实现,也不允许在标称色域内的颜色(例如嵌入原色)出现在模型化色域边界外。为解决此问题,可能需要考虑在色域内的所有四面体及其子四面体如何在模糊现象模型下映对。
在步骤(5)中,将在步骤(4)产生的可实现的色域表面模型用于颜色影像呈现过程的色域映对阶段中,可依循在一个以上步骤中修改的标准色域映对程序考虑色域边界的非凸性质。
希望在三维颜色空间中施行GD方法,其中色相(h*)、亮度(L*)及色度(C*)是独立的。由于此并非针对L*a*b*颜色空间的情况,自色域模型获得的(L*,a*,b*)样本应转换为色相线性化颜色空间,诸如CIECAM或Munsell空间。但以下讨论将维持(L*,a*,b*)术语为
h
如上述划定的色域可接着用于色域映对。在一适当的颜色空间中,通过考虑对应于给定色相角h*的色域边界,来源颜色可映对于目标(装置)颜色。此可通过计算在角度h*处的平面与色域模型的交点而达成,示如图8A与8B;红线指示该平面与色域的交点。注意目标色域既非平滑亦非凹面。为简化映对操作,自平面交点取得的三维数据经转换为L*与C*值,以给出图9所示色域边界。
在标准色域映对机制中,来源颜色经映对至目标色域边界上或内的一点。有许多用以达成此映对的可行策略,诸如沿着C*轴的映射或映射朝向L*轴上一定点,及无需在此就此更详细讨论。但由于目标色域边界现可是高度不规则(见图10A),这可能导致伴随映对至“正确”点的困难度现在是困难且不确定。为减少或克服此问题,可将平滑化操作应用于色域边界,使可降低边界的“突尖”。一种适用的平滑化操作是Balasubramanian与Dalal在“In Color Imaging:Device-Independent Color,Color Hard Copy,and Graphic ArtsII,volume 3018of Proc.SPIE,(1997,San Jose,CA)”的“A method for quantifying theColor Gamut of an Output Device”中所述算法的二维修改。
此平滑化操作可始于膨胀来源色域边界。为达此目的,定义L*轴上一点R,其是取自来源色域的L*值的平均值。可接着计算色域上点与R间的欧几里得距离D,法向量d,及标注为D
其中γ是用以控制平滑化角度的定值,对应于膨胀色域边界的C*与L*点接着是
C
L
若现取出膨胀色域边界的凸包,并接着实行逆转换以获得C*与L*,即可产生一平滑化色域边界。如图10A所示,平滑化目标色域依循目标色域边界,除了总凹面之外,大幅简化在图10B中所得色域映对操作。
现可通过下式计算经映对颜色:
a
b
可将(L*,a*,b*)坐标转换回sRGB系统。
针对来源色域中所有颜色重复此色域映对过程,使得可获得自来源至目标颜色的一对一映对。较佳可取样sRGB来源色域中的9x9x9=729个均匀间隔颜色;此对硬件施行极为便利。
DHHG方法
依本发明的一实施例的DHHG方法示例如附图的图11,其是概略流程图。图11所示方法可包括至少五步骤:去伽玛操作;HDR型处理;色相修正;色域映射及空间抖动操作;以下分别讨论每一步骤。
1.去伽玛操作
在本方法的第一步骤中,应用去伽玛操作(1)以移除编码在与输入影像(6)相关的输入数据中的幂定律,使得所有接续颜色处理操作应用于线性像素值。去伽玛操作较佳伴随使用包含16位值的256元素查询表(LUT),其是由一般在sRGB颜色空间中的8位sRGB输入寻址。或者,若显示处理器硬件允许,可利用解析公式施行该操作。例如sRGB去伽玛操作的解析定义为
其中a=0.055,C对应于红色、绿色或蓝色像素值,及C’是对应的去伽玛像素值。
2.HDR型处理
对于具抖动架构的彩色电泳显示器,常可见到低灰阶值的抖动假影。这在应用去伽玛操作时可能加剧,因为输入RGB像素值因去伽玛步骤而有效提升至大于1的指数。此使得像素值偏移至使得抖动假影变成更明显可见的较低值。
为减少假影冲击,较佳的是利用色调修正方法,其用以局部或整体增加在暗区域中的像素值。此等方法是熟悉高动态范围(HDR)处理架构者所熟知,其中具有极宽动态范围的捕捉或呈现影像后续经呈现用于低动态范围显示器上的显示。通过色调映对达成内容与显示的动态范围相符,且常造成场景中暗部的亮化以免损失细节。
因此,HDR型处理步骤(2)的一方面是将来源sRGB内容处理为相关于彩色电泳显示器的HDR,使得以将暗区域中的可映射抖动假影的机会降至最低。此外,通过HDR算法施行的颜色强化类型可具有最大化彩色电泳显示器用颜色显现的附加优点。
如上所述,HDR呈现算法是熟悉此技术者所周知的。在依本发明的各实施例的方法中的HDR型处理步骤(2)较佳包含局部色调映对、色素调适及局部颜色强化作为其组成部分。可作为HDR型处理步骤的HDR呈现算法的一示例是描述于Kuang,Jiangtao等人在“J.Vis.Commun.Image R.18(2007):406-414”的“iCAM06:A refined image appearancemodel for HDR image rendering.”中的iCAM06的一变体,在此将其所有内容以参照方式并入本文。
HDR型算法一般会利用一些环境相关信息,诸如场景照度或观察者调适。如图11所示,可通过例如照度敏感装置及/或趋近传感器将此信息以环境数据(7)形式提供给呈现序列的HDR型处理步骤(2)。环境数据(7)可来自显示器本身,或者其可由例如本地主机如移动电话或平板计算机的单独的网络化装置提供。
3.色相修正
由于HDR呈现算法可利用实体可见模型,故该等算法倾向于修改输出影像的色相,使得其后续异于原始输入影像的色相。这对含有内存颜色的影像尤其明显。为避免此效应,依本发明的各实施例的方法可包含色相修正阶段(3),以确保HDR型处理(2)的输出与输入影像(6)的sRGB内容具相同色相角。色相修正算法是熟悉此技术者所周知的。可在本发明的各实施例中的色相修正阶段(3)中采用的色相修正算法的一示例描述于Pouli,Tania等人在“CIC21:Twenty-first Color and Imaging Conference,page215--220-November2013”中的“Color Correction for Tone Reproduction”,在此将其全部内容以参照方式并入本文。
4.色域映对
由于彩色电泳显示器的色域可明显小于输入影像(6)的sRGB输入,故可将色域映对阶段(4)纳入依本发明的各实施例的方法中,将输入内容映对至显示的颜色空间中。色域映对阶段(4)可包括一色度调适模型(9),其中假设有多个标称原色(10)构成色域或含括邻近像素交互作用(“模糊现象”)的更复杂模型(11)。
在本发明的一实施例中,一色域映对影像较佳地通过三维查询表(3D LUT)自sRGB色域输入推估而成,诸如Henry Kang在“SPIE Press,2006”的“Computational colortechnology”中所述处理,在此将其全部内容以参照方式并入本文。通常,可通过定义于来源与目标色域上的离散样本上的离线转换达成色域映对阶段(4),所得转换值用以充实3DLUT。在一施行中,可利用729RGB元素长且采用四面体内插技术的3D LUT,诸如以下示例。
示例
为获取3D LUT的转换值,定义在来源色域中的一组均匀间隔取样点(R,G,B),其中这些(R,G,B)三元组的每一者均对应于输出色域中的等效三元组(R’,G’,B’)。为找出异于取样点处的(R,G,B)与(R’,G’,B’)的关系,亦即“任意点”处,可利用内插,较佳地为以下更详细描述的四面体内插。
例如参考图12,输入RGB颜色空间概念上是配置成正立方体14形式,且该组点(R,G,B)(15a-h)位于一个子正立方体(16)的顶点处;各(R,G,B)值(15a-h)具有在输出色域中的对应(R’,G’,B’)值。为找出任一输入色域像素值(R,G,B)的输出色域值(R’,G’,B’),如蓝色圆(17)所示,我们仅于子正立方体(16)的顶点(15a-h)间内插。以此方式,我们可仅利用输入与输出色域的稀疏取样来找出任意(R,G,B)的(R’,G’,B’)值。此外,(R,G,B)是均匀取样的事实,使得可直接利用硬件施行。
可由多种方法达成子正立方体内的内插。在依本发明的一实施例的一较佳方法中,采用四面体内插。由于一个正立方体可由六个四面体构成(见图13),故可通过对包围RGB的四面体的定位并利用重心内插将RGB表示为被包围四面体的加权顶点来完成内插。
在具有顶点v
及|·|是行列式。由于α
方程式(33)提供以输入色域的四面体顶点表示RGB的权重。因此,相同权重可用以内插于该等顶点处的R’G’B’值间。由于RGB与R’G’B’顶点值间的对应性提供填充3D LUT的值,故方程式(33)可转换为方程式(34):
其中LUT(v
对于硬件实现,利用顶点n
1.1找出子正立方体
首先通过以下计算找出包围子正立方体三元组RGB
其中RGB是输入RGB三元组,及
其中若n=9,则0≤RGB
1.2重心运算
由于事先已知四面体顶点v
rgb(1)>rgb(2)和rgb(3)>rgb(1)
rgb(1)>rgb(2)和rgb(3)>rgb(2)
rgb(1)>rgb(2)和rgb(3)
rgb(1)
rgb(1)
rgb(1)
1.3LUT索引 由于输入颜色空间具均匀间隔,故3D LUT中所含对应目标颜色空间样本LUT(v1,2,3,4)是由方程式(43)提供,
1.4内插 在最终步骤中,R’G’B’值可由方程式(17)判定,
如上所述,也可将色度调适步骤(9)并入处理流水线中,以修正输出影像中用于白阶显示的修正。彩色电泳显示器的白色颜料提供的白色点可明显异于输入影像的颜色空间中假设的白色点。为解决此差异,该显示器可维持输入颜色空间白色点,在此情况下抖动白色状态,或将颜色空间白色点偏移至白色颜料的白色点。后者操作是通过色度调适达成,且以白色点偏移为代价,可实质上减少在白色状态中的抖动噪声。 也可通过采用该显示器的环境情况参数化色域映对阶段(4)。CIECAM颜色空间例如包含用以考虑显示与周遭亮度与调适程度的参数。因此,在一施行中,可通过来自外部传感器的环境情况数据(8)控制色域映对阶段(4)。 5.空间抖动 在用以产生输出影像数据(12)的进程列中的最终阶段是空间抖动(5)。熟悉此技术者已知可采用多种空间抖动算法的任一者作为空间抖动阶段(5),其包含但不限于如上述者。当在足够距离观看抖动影像时,个别彩色像素被人类视觉系统合并成可察觉的均匀颜色。由于颜色深度与空间分辨率间的权衡,当近看抖动影像时,与在各像素位置处可得的颜色调色板具有在显示器上整体呈现影像所需相同深度的影像相较会呈特征粒状。但抖动减少色带的存在,这通常较粒状更令人反感,尤其是在远距观看时。 已发展出用以指定特定颜色给特定像素的算法,以避免因抖动呈现的影像中的令人不悦图案及纹理。此类算法可包括误差扩散,其是在特定像素所需颜色与在每一像素调色板中最接近的颜色间差异所致误差(亦即量化残余)被分布至尚未经处理的邻近像素的技术。欧洲专利第0677950号详述此类技术,而美国专利第5,880,857号描述用以比较抖动技术的指标。在此将美国专利第5,880,857号及其全部内容以参照方式并入本文。 自前述可知本发明的DHHG方法异于彩色电泳显示器用的先前影像呈现方法之处在于至少两个方面。首先,依本发明的各实施例的呈现方法处理影像输入数据内容如同是与窄色域的彩色电泳显示器的低动态范围性质相对的高动态范围信号,使得可在不具有害假影下呈现极广范围内容。再者,依本发明的各实施例的呈现方法提供用以基于通过接近或照度传感器监视的外部环境情况调整影像输出的替代方法。这提供增强的可用性的益处,例如图像处理被修改以考虑接近/远离观看者面部或周遭情况是暗或亮的显示。 远程影像呈现系统 如前述,本发明提供一种影像呈现系统,其包含一电光显示器(其可为电泳显示器,尤其是电子纸显示器)及经网络连接的远程处理器。该显示器包含一环境情况传感器,及配置成经由该网络提供环境情况信息至远程处理器。该远程处理器配置成接收影像数据,经网络接收来自该显示器的环境情况信息,呈现用于在该经接收环境情况下显示于该显示器上的影像数据,由此产生经呈现影像数据,并传输该经呈现影像数据。在一些实施例中,该影像呈现系统包含配置于第一与第二电极间的一层电泳显示材料,其中该等电极的至少一者可透光。电泳显示介质一般包含带电颜料粒子,其在施加电位于该等电极间时移动。带电颜料粒子常包括不只一种颜色,例如白色、青色、洋红色和黄色带电颜料。当出现四组带电粒子时,第一和第三组粒子可具有第一电极性,且第二和第四组粒子可具有第二电极性。此外,第一和第三组粒子可具有不同电荷量,且第二和第四组粒子可具有不同电荷量。 但本发明不限于四粒子电泳显示器。例如该显示器可包括一颜色过滤器数组。该颜色过滤器数组可与多个不同介质配对,例如电泳介质、电色度介质、反射型液晶或彩色液体,例如电润湿装置。在一些实施例中,电润湿装置可能不包含一颜色过滤器数组,但可包含彩色电润湿液体的像素。 在一些实施例中,环境情况传感器感测选自温度、湿度、入射光强度及入射光谱的参数。在一些实施例中,该显示器配置成接收远程处理器传输的经呈现影像数据并更新显示器上的影像。在一些实施例中,经呈现影像数据被一本地主机接收并接着自该本地主机传输至该显示器。有时经呈现影像数据从该本地主机无线传输至电子纸显示器。视需要,本地主机另自显示器无线接收环境情况信息。在一些实例中,本地主机另将环境情况信息自显示器传输至远程处理器。一般而言,远程处理器是连接至因特网的服务器计算机。在一些实施例中,影像呈现系统亦包含插接站,其配置成接收由远程处理器传输的经呈现影像数据并在显示器与插接站接触时更新显示器上的影像。 应注意在相依于环境温度参数的影像呈现的变化可包含经呈现影像的原色的数量变化。模糊现象是在电光介质中出现的各种材料的电气导磁率、流体黏度(在电泳介质的情况下)及其他温度相依性质的复杂函数,因此并不令人意外地,模糊现象本身是强烈温度相依。已于经验发现彩色电泳显示器仅可在有限温度范围内有效操作(一般约为50℃),且该模糊现象可随小得多的温度区间显著变化。 熟悉电光显示技术者已周知模糊现象可导致可达成显示色域的变化,因为在相邻像素间的一些空间中间点处使用不同的抖动原色,模糊现象可导致颜色与预期的两者平均具显著偏差。在生产上,此非理想性可通过针对不同温度范围定义不同显示色域而处理,各色域考虑在该温度范围处的模糊现象强度。随着温度变化及新温度范围的导入,呈现处理应自动呈现影像以考虑显示色域中的变化。 随着操作温度增加,来自模糊现象的贡献可严重至使得无法利用如同低温下的相同数量原色维持适当的显示性能。因此,本发明的呈现方法与设备可经配置使得随着经感测温度变化,不仅显示色域,还有原色数量均改变。例如在室温下,该等方法可利用32原色呈现影像,因为模糊现象贡献是可管控的;例如在较高温下,可能仅可使用16原色。 实际上,本发明的呈现系统可具有多个不同的预计算的3D查询表(3D LUT),其各对应于在一给定温度范围下的标称显示色域,且对于具有一系列P原色的各温度范围而言,一模糊现象模型具有PxP项。随着跨越一温度范围临限,呈现引擎经通知且影像根据新色域与系列原色重新呈现。由于本发明的呈现方法可处理任意数量个原色,及任何模糊现象模型,采用多个查询表,系列原色及温度相依模糊现象模型,提供用以优化本发明的呈现系统性能的重要自由度。 亦如前述,本发明提供一种影像呈现系统,其包含一电光显示器、一本地主机及一远程处理器,其中这三个组件经由一网络连接。本地主机包含一环境情况传感器,并且配置成经由该网络提供环境情况信息至远程处理器。该远程处理器配置成接收影像数据,经网络接收来自该本地主机的环境情况信息,呈现用于在该经接收环境情况下显示于该显示器上的影像数据,由此产生经呈现影像数据,并传输该经呈现影像数据。在一些实施例中,该影像呈现系统包含配置于第一与第二电极间的一层电泳显示材料,该等电极的至少一者可透光。在一些实施例中,该本地主机亦可传送影像数据至远程处理器。 亦如前述,本发明包含一插接站,其包括用于与电光显示器耦合的接口。该插接站配置成经由网络接收经呈现影像数据并以该经呈现影像数据更新显示器上的影像。一般而言,插接站包含用以提供多个电压至电子纸显示器的电源。在一些实施例中,电源配置成除了零电压外,提供三种不同大小的正与负电压。 因此,本发明提供一种用于在一显示器上呈现的呈现影像数据系统。由于影像呈现运算是在远程执行(例如经由例如在云端中的处理器或服务器),故影响呈现所需电子仪器数量降低。因此,系统用显示器仅需成像介质、包含像素的一背板、一前板、少量高速缓存、一些电力储存器及一网络连接。在一些实例中,显示器可经一实体连接如插接站或连接插件(dongle)作为接口。远程处理器将接收电子纸环境如温度相关信息。接着将环境信息输入一序列中以产生显示用原色组。接着将远程处理器接收的影像呈现供最佳观看之用,亦即经呈现影像数据。接着将该经呈现影像数据传送至显示器以在其上产生影像。 在一较佳实施例中,成像介质将是美国专利公开第2016/0085132号与第2016/0091770号中所述类型的彩色电泳显示器,其中描述一种四粒子系统,一般包括白色、黄色、青色及洋红色颜料。各颜料具有电极性与电量的一独特组合,例如+高、+低、-低及-高。如图14所示,可进行颜料组合以呈现白色、黄色、红色、洋红色、蓝色、青色、绿色及黑色予观看者。显示器的观看表面在上方(如例示),亦即使用者自此方向观看显示器且光是自此方向入射。在较佳实施例中,电泳介质中采用的四粒子中仅一者会实质散射光,及在图14,假设此粒子是白色颜料。基本上,光散射白色粒子构成白色反射器,按此可看到白色粒子上的任何粒子(如图14所示)。经过这些粒子进入显示器观看表面的光自白色粒子反射,传回经过这些粒子并自显示器聚集。因此,该等白色粒子上的粒子可吸收各种颜色且呈现给使用者的颜色是自白色粒子上的粒子组合而成。配置在白色粒子下的任何粒子(在使用者观点后方)均被白色粒子屏蔽,且不影响所显示的颜色。由于第二、第三及第四粒子是实质上不光散射,故其相对于彼此的顺序或配置并不重要,但由于上述原因,其相对于白色(光散射)粒子的顺序或配置至关重要。 具体地,当青色、洋红色及黄色粒子位于白色粒子下时(图14的情境[A]),并无粒子在白色粒子上且像素仅显示白色。当单一粒子在白色粒子上时,显示该单一例子的颜色,如图14中情境[B]、[D]与[F]中的黄色、洋红色与青色。当两粒子位于白色粒子上时,所显示的颜色是这两例子的组合;在图14中的情境[C]中,洋红色与黄色粒子显示红色,在情境[E]中,青色与洋红色粒子显示蓝色,及在情境[G]中,黄色与青色粒子显示绿色。最终,当三色粒子均位在白色粒子上时(图14中情境[H]),所有的入射光均被这三种相消性原色粒子吸收且像素显示黑色。 可能一种减法三原色可由散射光的一粒子呈现,使得显示可包括两类光散射粒子,一者是白色而另一者彩色。但在此情况下,光散射彩色粒子与覆盖白色粒子的其他彩色粒子的相对位置是重要的。例如在呈现黑色中(当三种彩色粒子均位于白色粒子上时),散射彩色粒子不能位于非散射彩色粒子上(否则其等将部分或完全隐藏在散射粒子之后且经呈现颜色将是散射彩色粒子的颜色而非黑色)。 图14显示一理想情境,其中的颜色未受污染(即光散射白色粒子完全屏蔽位于白色粒子后的任何粒子)。实际上,白色粒子屏蔽可能不完整,使得可能有未完全被屏蔽粒子的少量光吸收。此类污染一般会降低被呈现的颜色的亮度与色度。在本发明的呈现系统中采用的电泳介质中,应将此类颜色污染最小化至形成颜色的点与颜色呈现的业界标准相当。一种特别受欢迎的标准是SNAP(报纸广告产生用标准),其指定上述八原色的各者的L*、a*与b*值。(以下将用“原色”指代八种颜色,黑色、白色、三减色原色及三加色原色),如图14所示。) 图14所示用于电泳配置多个不同彩色粒子于“数层”的方法已在先前技术中描述过。此等方法中最简单的是包括具不同电泳移动率的“竞争”颜料;见于例如美国专利第8,040,594号。这种竞争比最初可能理解的情况更为复杂,因为带电颜料本身的移动会改变电泳流体内局部经历的电场。例如随着带正电粒子移向阴极且带负电粒子移向阳极,其电荷屏蔽在两电极中间的带电粒子经历的电场。考虑到虽然在本发明的系统中采用的电泳介质中涉及颜料竞争,但其并非造成图14中所示粒子配置相关的仅有现象。 可用以控制多个粒子移动的第二现象是不同颜料类型间的异质累积;见于例如美国2014/0092465。此累积可为电荷介导的(库伦性(Coulombic))或可是例如氢键或范德瓦尔斯力(van der Waals)交互作用所致。交互作用强度可受颜料粒子表面处理的选择影响。例如库伦性交互作用可在相反电荷粒子接近的最近距离因空间屏障(一般是被接引或吸收至一或两粒子表面的聚合物)最大化时弱化。在本发明的系统中采用的介质中,此类聚合物屏障是用于第一与第二型粒子上,并可用或可不用于第三与第四型粒子上。 可用以控制多个粒子移动的第三现象是电压或电流相依迁移率,如前述第14/277,107号申请中所详述。 在各个像素产生颜色的驱动机制并非简单明了,一般涉及如图15所示的复杂电压脉冲系列(a.k.a.波形)。现将描述利用施加于本发明的显示器的此第二驱动机制的用以产生八原色(白色、黑色、青色、洋红色、黄色、红色、绿色与蓝色)的一般原则(诸如图14所示)。将假设第一颜料为白色,第二青色,第三黄色及第四洋红色。熟悉此技术的一般技术人员将清楚,显示器展现的颜色将随指定颜料颜色的改变而变化。 施加于像素电极的最大正与负电压(在图15中标示为±Vmax)分别产生由第二与第四粒子混合或第三粒子独自形成的颜色。这些蓝色与黄色无需是显示器可达成的最佳蓝色与黄色。施加于像素电极的中度正与负电压(在图15中标示为±Vmid)分别产生黑色与白色。 自这些蓝色、黄色、黑色或白色光学状态,可通过仅相对于第一粒子(在此情况下为白色粒子)移动第二粒子(在此情况下为青色粒子)而获得其他四原色,这是利用最小施加电压(在图15中标示为±Vmin)达成。因此,将青色移出蓝色之外(通过施加-Vmin至像素电极)产生洋红色(比照图14,情境[E]与[D]分别是蓝色与洋红色);将青色移入黄色内(通过施加+Vmin至像素电极)提供绿色(比照图14,情境[B]与[G]分别是黄色与绿色);将青色移出黑色之外(通过施加-Vmin至像素电极)提供红色(比照图14,情境[H]与[C]分别是黑色与红色);及将青色移入白色内(通过施加+Vmin至像素电极)提供青色(比照图14,情境[A]与[F]分别是白色与青色)。 虽然这些一般原则可用于建构用以产生本发明的显示器中特定颜色的波形,实际上,可能观察不到上述理想行为,并希望采用对基本机制的修改。 蕴实现上述基本原则修改的通用波形例示如图15,其中横坐标代表时间(任意单位)及纵坐标代表一像素电极与共同前电极间的电压差。在图15中所示驱动机制中采用的三个正电压的大小可介于约+3V与+30V间,三个负电压的大小则可介于约-3V与-30V间。在一经验上较佳实施例中,最高正电压+Vmax是+24V,中间正电压+Vmid是12V,及最低正电压+Vmin是5V。在一类似方式中,负电压-Vmax、-Vmid与-Vmin在一较佳实施例中是-24V、-12V与-9V。对三种电压位准中的任一种均无需电压大小|+V|=|-V|,但在一些情况下按此可较佳。 在图15中所示通用波形有四个不同阶段。在第一阶段中(图15中的“A”),具有+Vmax与-Vmax的供应脉冲(其中“脉冲”是指单极方波,亦即在一预定时间内施加一恒定电压),用以清除在显示器上呈现的先前影像(亦即“重置”该显示器)。可选择这些脉冲(t 图15中所示波形仅供例示通用波形结构之用,而不是以任何方式来限制本发明的范畴。因此,在图15中,在阶段A中所示的一负脉冲前是一正脉冲,但此非本发明的要求。亦未要求在阶段A中仅具单一负与单一正脉冲。 如上述,该通用波形本质上是直流平衡的,且此在本发明的特定实施例中可较佳。或者,在阶段A中的脉冲可提供直流平衡至一系列颜色过渡而非单一过渡,此方式与先前技术中某些黑白显示器中提供的方式类似,见于例如美国专利第7,453,445号。 在波形的第二阶段中(图15中的阶段B),具有采用最大与中间电压大小的供应脉冲。在此阶段中,白色、黑色、洋红色、红色与黄色经较佳呈现。更一般言之,在波形的此阶段中,形成的颜色对应于类型1粒子(假设白色粒子带负电),类型2、3与4粒子的组合(黑色),类型4粒子(洋红色),类型3与4粒子的组合(红色)及类型3粒子(黄色)。 如上述,白色可由-Vmid的一脉冲或多个脉冲呈现而成。但在一些情况中,以此方式产生的白色可受黄色颜料污染而呈浅黄色。为修正此颜色污染,可能须导入一些正极性脉冲。因此,例如可由单一实例或一序列的脉冲的重复实例获得白色,该序列的脉冲包括具长度T 如上述,可通过+Vmid的一脉冲或多个脉冲(由数个周期的零电压间隔开)呈现获得黑色。 如上述,可由单一实例或一序列的脉冲的重复实例获得洋红色,该序列的脉冲包括具长度T 如上述,可由单一实例或一序列的脉冲的重复实例获得红色,该序列的脉冲包括具长度T 可由单一实例或一序列的脉冲的重复实例获得黄色,该序列的脉冲包括具长度T 在波形的第三阶段中(图15中的阶段C),具有采用中间与最小电压大小的供应脉冲。在波形的此阶段中,蓝色与青色是在波形的第二阶段后向白色的驱动产生,及绿色是在波形的第二阶段后向黄色的驱动产生。因此,当观察到本发明的显示的波形瞬时时,蓝色与青色之前将是其中b*较最终青色或蓝色的b*值更正的颜色,及绿色之前将是其中L*较高且a*与b*较最终绿色的a*与b*更正的更黄色。更一般言之,当本发明的显示正呈现对应于第一与第二粒子的一显色粒子的颜色时,该状态之前将是本质上为白色的状态(亦即具有约小于5的C*)。当本发明的显示正呈现对应于第一与第二粒子的一显色粒子及第三与第四粒子中所带电荷与此粒子相反的粒子的组合的颜色时,该显示本质上将先呈现第三与第四粒子中所带电荷与第一与第二粒子的该显色粒子相反的该粒子的颜色。 一般而言,青色与绿色将由其中须使用+Vmin的一脉冲序列产生。这是因仅有在此最小正电压下,青色颜料可相对于白色颜料而独立于洋红色与黄色颜料移动。青色颜料的此移动需呈现始于白色的青色或始于黄色的绿色。 最终,在波形的第四阶段中(图15中的阶段D),供应零电压。 虽然以描述图14所示显示为产生八原色,实际上,较佳的是尽可能在像素层级处产生更多颜色。接着可通过这些颜色间的抖动呈现全彩灰阶影像,这是利用熟悉成像技术者所熟知的技术为之。例如,除了如上述产生的八原色外,该显示可配置成呈现额外八色。在一实施例中,这额外八色是:浅红色、浅绿色、浅蓝色、深青色、深洋红色、深黄色,及黑色与白色间的两个灰阶。本文中所用术语“浅”与“深”是指在颜色空间中具有实质上相同色相角,诸如CIE L*a*b*为参考色,但分别具较高或较低L*。 通常,浅色获得方式与深色相同,但在阶段B与C中采用具有些微差异净脉冲的波形。因此,例如在阶段B与C中,浅红色、浅绿色与浅蓝色波形与对应的红色、绿色与蓝色波形相较具有较负的净脉冲,而在阶段B与C中,深青色、深洋红色与深黄色与对应的青色、洋红色与黄色波形相较具有较正的净脉冲。在净脉冲中的变化可通过改变在阶段B与C中的脉冲长度、脉冲数或脉冲大小达成。 灰色一般是由在低或中电压间振荡的一序列的脉冲实现。 熟悉此技术者将清楚在利用薄膜晶体管(TFT)数组驱动的本发明的显示器中,在图15的横坐标上可用的时间增量一般将由显示器的帧形(frame)率量化。类似地,将清楚可通过改变像素电极相对于前电极的电位而寻址显示器,且此可通过改变像素电极或前电极或两者的电位而达成。在最新技术中,像素电极矩阵一般呈现在背板上,而前电极是所有像素共享。因此,当改变前电极电位时,所有像素的寻址受到影响。参考图15的上述波形的基本结构相同,与是否改变施加至前电极的电压无关。 图15中所示通用波形需要驱动电子器件在显示器的所选列更新期间提供多达七个不同电压至数据线。虽可获得可传送七个不同电压的多阶源驱动器,许多电泳显示器用的市售源驱动器在单一帧形期间仅允许传送三个不同电压(一般为一正电压、零及一负电压)。此处所用术语“帧形”是指在显示器中所有行的单一更新。可修改图15的通用波形以容纳三阶源驱动器架构,其中可自一帧形至次一帧形改变供应至面板的三个电压(亦即使得例如可在帧形n中供应电压(+Vmax,0,-Vmin),而在帧形n+1中可供应电压(+Vmid,0,-Vmax))。 由于供应至源驱动器的电压改变会影响所有像素,故需按此修改波形,使得用以产生各色的波形须与所供应电压对齐。抖动与灰阶的添加使得为产生所要影像须产生的影像数据组更为复杂。 前已参考图11描述用于呈现影像数据(例如位图文件)的示例序列。此序列包括五步骤:去伽玛操作;HDR型处理;色相修正;色域映射及空间抖动操作,及这五步骤整体代表大量运算负载。本发明的RIRS提供将这些复杂计算自实际整合于显示器中的处理器移除的解决方式,,例如一彩色照片图框。因此,可削减显示器的成本与体积,其可允许例如轻质柔性显示器。图16中显示简单实施例,其中显示器可经无线因特网连接与远程处理器直接通讯。如图16所示,显示器传送环境数据至远程处理器,其使用环境资料作为例如去伽玛修正的输入。接着远程处理器回传经呈现影像数据,其可为波形指令形式。 如图17与图18可证,可获得多种替代架构。在图17中,本地主机充作电子纸与远程处理器间的中介者。本地主机可另为原始影像数据源,例如移动电话摄影机拍摄的照片。本地主机可自显示器接收环境数据,或者本地主机可利用其传感器提供环境数据。显示器与本地主机两者将视需要与远程处理器直接通讯。本地主机亦可并入插接站中,如图18所示。插接站可具有到显示器的有线因特网连接或一物理连接。插接站亦可具有电源,以提供为提供与图15所示类似波形所需的各种电压。通过将电源移出显示器外,显示器价格降低且几乎没有针对外部电源的需求。显示器亦可经线状或带状电缆耦合至插接站。 图19显示“实境”实施例,其中各显示器被称为“客户”。各“客户”具有专属ID并较佳利用低功率/微功率通讯协议报告有关其性能的元数据(诸如温度、打印状态、电泳墨水版本等)至“主机”。在此实施例中,“主机”是执行软件应用程序的个人移动设备(智能型手机、平板、AR耳机或笔记本电脑)。“主机”可与“打印服务器”及“客户”通讯。在一实施例中,“打印服务器”是一基于云端的解决方式,其可与“主机”通讯并提供“主机”多种服务如鉴认、图像检索及呈现。 当使用者决定在“客户”(显示器)上显示影像时,会开启在其“主机”(移动设备)上的应用程序,并取出欲显示的影像及所欲显示影像的特定“客户”。“主机”接着轮询“客户”的专属装置ID与元数据。如上述,此事务可透过短距微功率协议如蓝牙4完成。一旦“主机”取得装置ID及元数据,即将之与用户鉴认及影像ID组合,并透过无线连接将之传送至“打印服务器”。 “打印服务器”接收到鉴认、影像ID、客户ID与元数据后,接着自数据库获取影像。此数据库可为分布式存储器(类似另一云端)或可在“打印服务器”内部。影像可能已先由用户上载至影像数据库,或可是库存影像或供购置影像。“打印服务器”已自储存器获取用户所选影像后,即执行呈现操作,其修改所获取影像以正确显示于“客户”端。可于“打印服务器”上执行呈现操作或可经由一独立软件协议在基于专属云的呈现服务器(提供“呈现服务”)上进入呈现操作。其亦可事先有效率地呈现所有用户影像并将之储存于其影像数据库中的资源。在该情况中,“打印服务器”将仅通过客户元数据索引LUT并获取正确的经预呈现影像。“打印服务器”已取得经呈现影像后,将此数据回传至“主机”,且该“主机”将此信息经由前述相同的微功率通讯协议传送至“客户”。 在参考图14与图15所述四色电泳系统的情况中(可称为先进彩色电子纸或ACeP),此影像呈现采用与特定电泳介质相关的颜色信息作为利用特定波形(可已预加载ACeP模块或自服务器传输)并同用户所选影像本身驱动时的输入。用户所选影像可为数种标准RGB格式(JPG、TIFF等)的任一种。输出的经处理影像是被索引的影像,其具有例如ACeP显示模块的每像素5位。此影像可是专属格式并可压缩。 在“客户”处的影像控制器将取得经处理影像数据,并可储存,置入显示串行,或直接在ACeP屏幕上显示。在完成显示“打印”后,“客户”将适当元数据传送至“主机”,且该“主机”将其中继至“打印服务器”。所有的元数据均将被记录于储存影像的数据体中。 图19显示一数据流,其中的“主机”可为电话、平板、PC等,客户是ACeP模块,打印服务器存在云端中。打印服务器与主机亦可为同一机器,例如一PC。如前述,本地主机亦可整合于插接站中。主机亦可与客户及云端通讯以要求呈现影像,后续打印服务器将经处理影像直接传送至客户端而无主机介入, 此实施例的一种更适于电子标牌或货架标签应用的变体考虑将“主机”自交易中移除。在此实施例中,“打印服务器”将通过因特网直接与“客户”通讯。 现将描述某些特定实施例,在其中的一个实施例中,被输入至图像处理的特定波形相关颜色信息(如上述)将会变化,因为所选择的波形可能取决于ACeP模块的温度。因此,用户所选的同一个影像可造成数个不同的经处理影像,每一个均适于特定温度范围。一种选择是主机向打印服务器传送关于客户端温度的信息,客户端则仅接收适当影像。或者,客户可接收数个经处理影像,每一个均与可能的温度范围相关联。另外一种可能性是移动主机可利用其主板上的温度传感器及/或光传感器取得的信息估计邻近客户的温度。 在另一实施例中,波形模式或影像呈现模式可视用户偏好而变。例如用户可选择高对比度波形/呈现选项,或高速、低对比选项。甚至可在已安装ACeP模块后取得新的波形模式。在这些情况中,波形及/或呈现模式相关元数据会自主机传送至打印服务器,且可能伴随波形经适当处理的影像会被传送至客户端。 可通过云端服务器就可得波形模式及呈现模式更新主机。 储存ACeP模块特定信息的位置可变。此信息可驻存于打印服务器中,由例如并同自主机要求的影像传送的序号索引。或者,此信息可驻存于ACeP模块中。 自主机传输到打印服务器的信息可被加密,自服务器中继至呈现服务的信息亦可被加密。元数据可包含用以促进加密与解密的加密秘钥。 自前述可知,本发明可提供对受限调色板显示中的颜色改善,其所具假影少于利用已知误差扩散技术所得假影。本发明本质上不同于先前技术之处在于在量化前调整原色,然而先前技术(如以上参考图1所述)会先实现阈值处理且在待扩散误差的后续计算期间仅导入点重迭或其他像素间交互作用的效应。本方法中采用的“前置”或“预调整”技术所具重要优点在于模糊现象或其他像素间交互作用强且非单调,有助于稳定本方法的输出及动态减少输出变动。本发明也提供独立考虑相邻像素的像素间交互作用的简单模型。此允许因果关联的及快速的处理,并减少估计所需的模型参数量,其对高数量(如32或更高)原色是重要的。先前技术未考虑独立相邻交互作用,因为物理点重迭经常涵盖一像素的绝大部分(然而在ECD显示中,其是沿着像素边缘的窄而密集带),且未考虑高数量原色,因为一般打印机的原色数不高。 对于适用本发明的彩色显示系统的进一步细节,读者可针对前述ECD专利(其也提供电泳显示的详细讨论)及下列专利与公开案:美国专利第6,017,584号;第6,545,797号;第6,664,944号;第6,788,452号;第6,864,875号;第6,914,714号;第6,972,893号;第7,038,656号;第7,038,670号;第7,046,228号;第7,052,571号;第7,075,502号;第7,167,155号;第7,385,751号;第7,492,505号;第7,667,684号;第7,684,108号;第7,791,789号;第7,800,813号;第7,821,702号;第7,839,564号;第7,910,175号;第7,952,790号;第7,956,841号;第7,982,941号;第8,040,594号;第8,054,526号;第8,098,418号;第8,159,636号;第8,213,076号;第8,363,299号;第8,422,116号;第8,441,714号;第8,441,716号;第8,466,852号;第8,503,063号;第8,576,470号;第8,576,475号;第8,593,721号;第8,605,354号;第8,649,084号;第8,670,174号;第8,704,756号;第8,717,664号;第8,786,935号;第8,797,634号;第8,810,899号;第8,830,559号;第8,873,129号;第8,902,153号;第8,902,491号;第8,917,439号;第8,964,282号;第9,013,783号;第9,116,412号;第9,146,439号;第9,164,207号;第9,170,467号;第9,182,646号;第9,195,111号;第9,199,441号;第9,268,191号;第9,285,649号;第9,293,511号;第9,341,916号;第9,360,733号;第9,361,836号;及第9,423,666号;及美国专利申请公开第2008/0043318号;第2008/0048970号;第2009/0225398号;第2010/0156780号;第2011/0043543号;第2012/0326957号;第2013/0242378号;第2013/0278995号;第2014/0055840号;第2014/0078576号;第2014/0340736号;第2014/0362213号;第2015/0103394号;第2015/0118390号;第2015/0124345号;第2015/0198858号;第2015/0234250号;第2015/0268531号;第2015/0301246号;第2016/0011484号;第2016/0026062号;第2016/0048054号;第2016/0116816号;第2016/0116818号;及第2016/0140909号。 本领域的普通技术人员将显而易见可在不背离本发明的范围下,对上述本发明的特定实施例进行多种改变与修改。因此,所有前述均应被视为例示而无限制之意。
- 用于呈现彩色影像的方法和设备
- 用于呈现彩色影像的方法和设备