一种融合HOG-LBP函数的交通信号灯检测方法
文献发布时间:2023-06-19 09:40:06
技术领域
本发明属于目标检测领域,具体涉及一种融合HOG-LBP的交通信号灯检测方法。
背景技术
在实际生活中,交通信号灯及其倒计时数字检测易受到外界光线、天气的变化的影响,例如逆光情况或者交通信号灯多种多样、遮挡、污损和背景噪声等不可抗的因素都为检测和识别增加了难度。HOG特征在目标检测和跟踪领域用于描述物体的关键点特征,而LBP特征在纹理分析领域也取得成功应用,这2种特征的表述能力都很强,但不能适用较多复杂的交通灯周围环境。在复杂的交通信号灯环境中,单一特征的表述能力有限,因此需要多个不同的特征进行融合,期望得到准确的交通信号灯特征表示。
针对上述问题,本文提出基于HOG和LBP特征融合的交通信号灯识别方法,首先分别提取HOG特征和LBP特征,然后利用PCA-LDA方法进行降维,最终采用特征融合策略采用进行识别。
发明内容
本发明的目的是提供一种融合HOG-LBP函数的交通信号灯检测方法,在保证算法速度的前提下,提高了算法的鲁棒性和识别准确率。
本发明所采用的技术方案是,一种融合HOG-LBP的信号交通灯检测方法,具体按以下步骤实施:
步骤1,输入训练样本交通信号灯图像;
步骤2,分别提取步骤1中训练样本图像的HOG特征和LBP特征;
步骤3,对经过步骤2后提取的图像的HOG特征和LBP特征进行PCA+LDA降维;
步骤4,对经过步骤3得到的降维后的HOG特征和LBP特征进行特征融合,得到HOG-LBP特征;
步骤5,根据经步骤4得到的图像的HOG-LBP特征放入支持向量机SVM算法中训练,获得SVM交通信号灯分类器;
步骤6,通过步骤5得到的SVM分类器对图像进行检测。
本发明的特点还在于:
其中步骤1中,输入训练样本交通信号灯图像后,需判断样本图片是否是灰度图像,若不是,将图像转化为灰度图像;
其中步骤2中HOG特征提取过程主要包括:
图像归一化、计算梯度、基于梯度幅度的方向权重投影和特征向量归一化几个部分,具体计算过程如下:
假定候选区域的大小为80×64,设置block块的大小8×8,则候选区域共包含80个不重叠的block块;
首先在每个block块上计算其梯度方向和幅值,采用简单的中心对称算子[-1,0,1]计算梯度,如下式所示:
式中,I(x,y)是图像点(x,y)的像素值,θ(x,y)为该点的梯度方向,m(x,y)对应为该点的幅度值;
然后设置cell大小为4×4,在每个block内按cell大小统计梯度直方图,应用梯度的幅值进行规定权重投影;
对于每个重叠block内的cell进行对比度归一化;
最后将所有block内的直方图向量组合得到最终的HOG特征向量;
其中步骤2中LBP特征提取过程主要包括:
LBP算子通常由(P,R)来表示,其中,P表示领域内包含的像素个数;R表示领域半径,基本的LBP算子是(8,1)领域;
首先将3×3领域像素值pi(i=1,2,…,8)与中心像素值p0进行比较,进行阈值化处理,其计算公式为:
将bi(i=1,2,…,8)按顺时针方向排列得到一个8位的二进制编码,再转换为十进制数,则得到LBP算子对中心像素计算得到后的结果;
交通信号灯图像经过LBP算子运算后,对图像中每个像素点f
式中,n为LBP算子产生不同标记的数据,采用3×3领域的一致模式算子,即n=256,另外,当x为真时,I(x)=1;当x为假时,I(x)=0;
将图像分为区域R
i=0,1,…,n-1;j=0,1,…,m-1 (5)
其中步骤3中对HOG特征和LBP特征进行PCA+LDA降维具体包括:
首先进行PCA降维:
假定有N个交通信号灯样本{x
其中,μ是样本的均值;
并寻找一个最优投影矩阵W
W
其中,W是协方差矩阵S
接着进行LDA降维:
类间散度矩阵S
其中,μ
式(10)可以用下式来计算:
其中,i=1,2,…,m;W
其中步骤4中对降维后的HOG特征和LBP特征进行特征融合的具体过程是:
采用加权的方式进行特征融合,融合公式如下:
式中,m表示分类器的数目;w
式中,E
假定有m个不同的分类器,其交通信号灯图像特征为x,在对真实分类判别函数进行估计时,有m个不同的判别函数:
g
式中,h(x)表示真实的分类判别函数;表g
在进行特征融合之后,整个特征融合系统的均方差可以表示为:
式中,α
其中步骤6具体包括:经上述步骤训练好的SVM交通信号灯分类器对图像进行检测,若分类结果为真,则认为图像中的目标是交通信号灯,若分类结果若其他,则认为图像中的目标不是交通信号灯。
本发明的有益效果是:
本发明的一种融合HOG-LBP的信号交通灯检测方法使用的基于HOG-LPB融合特征来及进行交通信号灯识别。此方法尺度恒定,能够在复杂的交通信号灯场景中进行可靠的交通信号灯检测,便于下一步的识别。本方法结合了HOG特征和LPB特征,在描述性能上比单一特征要丰富,能够弥补单一特征的局限性从而提高识别率。在采用融合特征提高识别率的同时,采用PCA和LDA相结合的方法进行特征降维,不仅大大缩短了识别的时间,同时也提高了系统的鲁棒性。
附图说明
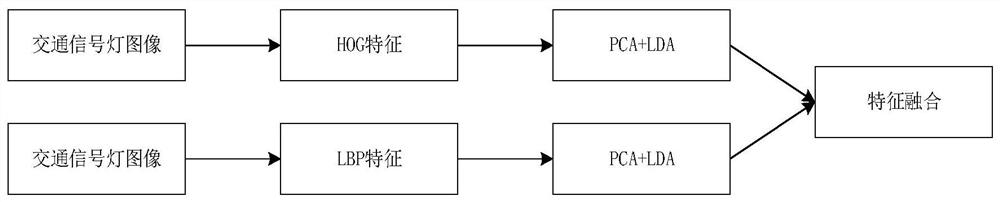
图1为本发明的一种融合HOG-LBP的交通信号灯检测方法中HOG-LBP融合框架图。
具体实施方式
下面结合附图和具体实施方式对本发明进行详细说明。
本发明提供了一种融合HOG-LBP的信号交通灯检测方法,如图1所示,具体按以下步骤实施:
步骤1,输入训练样本交通信号灯图像,并且判断样本图片是否是灰度图像,若不是,将图像转化为灰度图像;
步骤2,特征提取主要分为两步HOG特征提取和LBP特征提取。
获取图像HOG特征提取,步骤主要包括图像归一化、计算梯度、基于梯度幅度的方向权重投影、特征向量归一化几个部分,具体计算过程如下:
假定候选区域的大小为80×64,设置block块的大小8×8,则候选区域共包含80个不重叠的block块;
首先在每个block块上计算其梯度方向和幅值,采用简单的中心对称算子[-1,0,1]计算梯度,如下式所示:
式中,I(x,y)是图像点(x,y)的像素值,θ(x,y)为该点的梯度方向,m(x,y)对应为该点的幅度值;
然后设置cell大小为4×4,在每个block内按cell大小统计梯度直方图,应用梯度的幅值进行规定权重投影;
然后对于每个重叠block内的cell进行对比度归一化,以消除光照的影响;
最后将所有block内的直方图向量组合得到最终的HOG特征向量。
接着获取图像LBP特征:
LBP基本思想是根据中心像素点与其圆形域内的像素点比较得到的二进制码来描述局部纹理特征,LBP算子通常由(P,R)来表示,其中,P表示领域内包含的像素个数;R表示领域半径,基本的LBP算子是(8,1)领域;
首先将3×3领域像素值pi(i=1,2,…,8)与中心像素值p0进行比较,进行阈值化处理,其计算公式为:
将bi(i=1,2,…,8)按顺时针方向排列得到一个8位的二进制编码,再转换为十进制数,则得到LBP算子对中心像素计算得到后的结果;
交通信号灯图像经过LBP算子运算后,对图像中每个像素点f
式中,n为LBP算子产生不同标记的数据,本文采用3×3领域的一致模式算子,即n=256,另外,当x为真时,I(x)=1;当x为假时,I(x)=0;
为了更好地表示交通信号灯特征,将图像分为区域R
i=0,1,…,n-1;j=0,1,…,m-1 (5)
步骤3,对HOG特征和LBP特征进行PCA+LDA降维:
首先进行PCA降维:
假定有N个交通信号灯样本{x
其中,μ是样本的均值。
并寻找一个最优投影矩阵W
W
其中,W是协方差矩阵S
接着进行LDA降维:
类间散度矩阵S
其中,μ
式(10)可以用下式来计算:
其中,i=1,2,…,m;W
步骤4,融合HOG-LBP特征:
采用加权的方式进行特征融合,融合公式如下:
式中,m表示分类器的数目;w
式中,E
假定有m个不同的分类器,其交通信号灯图像特征为x,在对真实分类判别函数进行估计时,有m个不同的判别函数:
g
式中,h(x)表示真实的分类判别函数;g
在进行特征融合之后,整个特征融合系统的均方差可以表示为:
式中,α
步骤5,采用线性支持向量机SVM(Support Vector Machine)算法对HOG-LBP融合特征向量进行训练,获得SVM交通信号灯分类器;
步骤6,使用已经训练好的SVM交通信号灯分类器对图像进行检测,若分类结果为真,则认为图像中的目标是交通信号灯,若分类结果若其他,则认为图像中的目标不是交通信号灯。
- 一种融合HOG-LBP函数的交通信号灯检测方法
- 一种融合HOG-LBP和KCF的行人跟踪方法