一种全自动智能鞋柜
文献发布时间:2023-06-19 09:44:49
技术领域
本发明涉及鞋柜技术领域,具体属于一种全自动智能鞋柜。
背景技术
智能家居是近年来随着科技进步而带来的一个新生产业,随着智能家居的推广普及,消费者在家居装修时逐渐开始将智能家居作为首选。智能家居的市场潜力巨大,产业前景光明。数据显示,2017年中国智能家居市场规模达到3342.3亿元,到2020年市场规模将达到5800亿元。智能家居产品涉及家庭清洁、防盗、影音、饮食等各个方面,而针对家庭清洁,市面上常见的智能清洁产品为自动洗碗机、扫地机器人等。经过调查,家庭玄关区的鞋子摆放、归纳与异味是常见的问题,传统鞋柜中的各类鞋子需要人归纳整理,费时费力,有时候回家进门时双手拿满东西,无法放置鞋子,另鞋子堆积也容易滋生细菌产生异味。目前市面上只有传统鞋柜以及电子消毒鞋柜,并无自动归纳整理并兼具消毒功能的鞋柜,所以需要寻找一种能够解决上述问题的鞋柜。
发明内容
本发明的目的在于提供一种全自动智能鞋柜,该鞋柜能够全自动运行,无需任何人工操作,极大地提高了便利性与操作效率。
为了实现上述目的,本发明采用以下技术方案:
一种全自动智能鞋柜,包括鞋柜框架、鞋托支架、鞋托、连杆机构、磁吸机构、传送机构和控制系统,所述鞋柜框架为分隔成若干层的方形框架,所述鞋托支架设置在每一层的鞋柜框架上,所述鞋托放置在鞋托支架上,该鞋托的底部设有磁铁,所述连杆机构包括上连杆和下连杆,并设置在鞋柜框架的两侧上下方,所述每个上连杆和下连杆的两端通过设置固定杆连接,两个所述上连杆之间设置上滑杆连接,两个所述下连杆之间设置下滑杆连接,所述上滑杆和下滑杆的两端分别可滑动设置在固定杆上并能在固定杆上前后滑动,该上滑杆的一端设置有与上连杆连接的第一电机,用于带动上连杆的运动,所述下滑杆位于鞋柜最底层的下方,所述磁吸机构可滑动的设置在竖向滑杆上,该竖向滑杆竖向设置并分别与上滑杆、下滑杆滑动连接,该竖向滑杆的顶部设有第二电机带动竖向滑杆的运动,所述传送机构设置在鞋柜框架的前侧下方,该传送机构通过设置电动推杆与鞋柜框架后侧连接,且该电动推杆位于最底层鞋托支架的下方,所述控制系统设置在鞋柜框架上并与电源连接,且该控制系统分别与第一电机、第二电机、电动推杆、磁吸机构、传送机构连接并控制运动。
进一步地,所述鞋柜框架上还设有语音模块,该语音模块控制系统连接并通过语音模块触发控制系统控制整个鞋柜的运作。
进一步地,所述鞋柜框架为铝合金材质,鞋柜框架的左侧和后侧在每一层上设置竖梁和横梁,其中后侧的横梁上垂直设置有向前延伸的竖梁,所述鞋托支架水平设置在竖梁上。
进一步地,所述鞋托支架为在竖梁上设置两根横向的支轴而成。
进一步地,所述鞋托的边沿设有若干个挂件。
进一步地,所述传送机构包括舵机、下层架和上层架,所述舵机与电动推杆连接,所述下层架设置在舵机上方,所述上层架通过铰接杆连接下层架形成等角速度铰链四杆机构,所述上层架的上表面设有与挂件适配的挂槽。
进一步地,所述上连杆和下连杆的结构一致,所述上连杆包括前杆、后杆、滑动件,所述后杆的一端可转动连接在鞋柜框架上,另一端与前杆铰接,该前杆的前度则铰接在滑动件上,所述滑动件的下部设有穿孔,所述固定杆穿过该穿孔设置,所述第一电机设置在上连杆的滑动件上。
进一步地,所述上滑杆和下滑杆上均设有所述滑动件,并通过滑动件竖向固定竖向滑杆,所述第二电机设置在上滑杆的滑动件上并与竖向滑杆连接,该第二电机驱动滑动件的运动。
进一步地,所述磁吸机构包括夹持部、第三电机、直角支架、电磁铁和紫外灯,所述夹持部夹持在竖向滑杆上,所述第三电机设置在夹持部内控制夹持部在竖向滑杆上移动,所述直角支架水平设置在夹持部上,并使自由端与竖向滑杆垂直,直角支架的自由端呈圆形端部,所述电磁铁设置在圆形端部的上表面,所述紫外灯设置在圆形端部的下表面。
综上所述,由于本发明采用了上述技术方案,本发明具有以下技术效果:
(1)本发明通过该智能鞋柜全自动智能收集归纳鞋子,无需人工摆放,无需操控任何遥控器或按钮,提高了家庭生活的便利性;
(2)通过将传送机构设置成平行四边形的连杆鞋架使鞋盒贴紧地面,任意体重的使用者均可踩在鞋盒上进行脱鞋动作;
(3)通过在磁吸机构设置取鞋电磁铁的设计免除复杂的抓取机构;
(4)通过设置紫外灯能够对鞋子进行紫外消毒,紫外线消毒设置于抓取机构处,实现一对多式扫描消毒。
附图说明
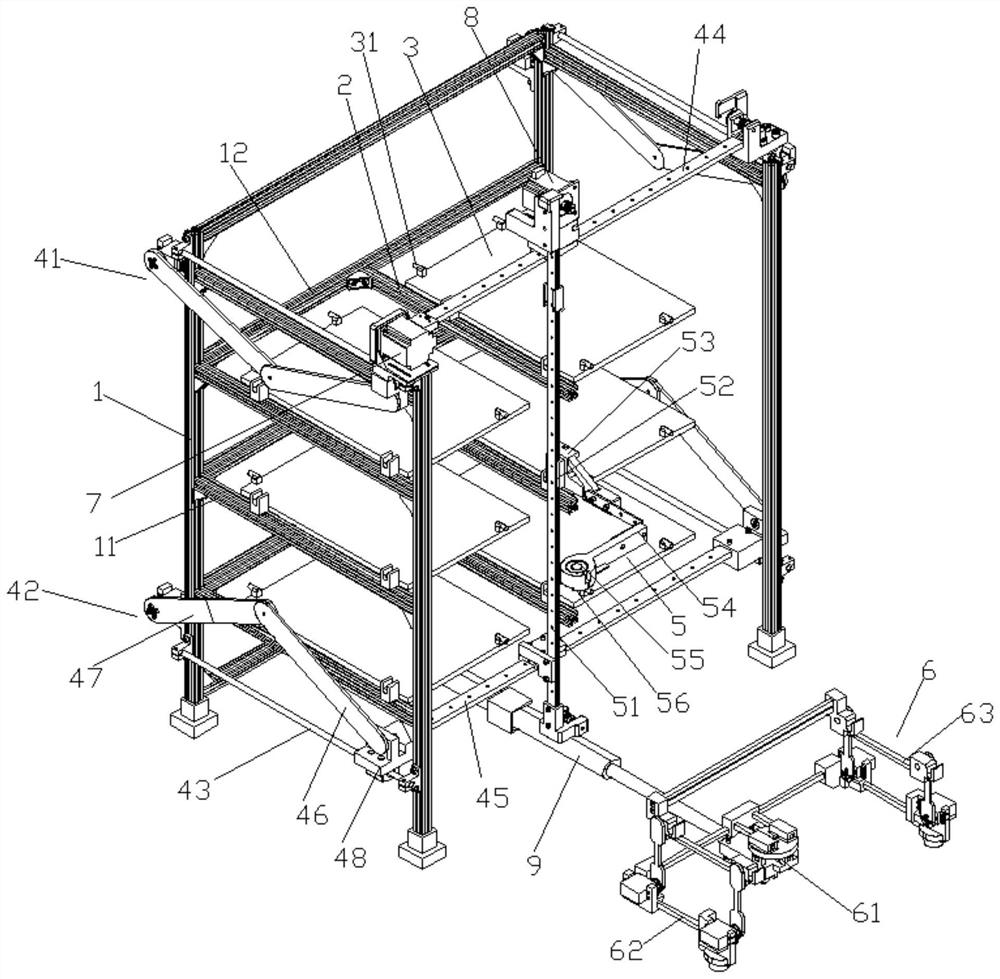
图1是本发明的结构示意图;
图2是本发明的电控系统的控制示意图。
附图中,鞋柜框架1、竖梁11、横梁12、鞋托支架2、鞋托3、挂件31、上连杆41、下连杆42、固定杆43、上滑杆44、下滑杆45、前杆46、后杆47、滑动件48、磁吸机构5、竖向滑杆51、夹持部52、第三电机53、直角支架54、电磁铁55、紫外灯56、传送机构6、舵机61、下层架62、上层架63、第一电机7、第二电机8、电动推杆9。
具体实施方式
为使本发明的目的、技术方案及优点更加清楚明白,以下参照附图并举出优选实施例,对本发明进一步详细说明。然而,需要说明的是,说明书中列出的许多细节仅仅是为了使读者对本发明的一个或多个方面有一个透彻的理解,即便没有这些特定的细节也可以实现本发明的这些方面。
实施例1
如图1和图2所示,一种全自动智能鞋柜,包括鞋柜框架1、鞋托支架2、鞋托3、连杆机构4、磁吸机构5、传送机构6和控制系统(图中未示出),所述鞋柜框架1为分隔成若干层的方形框架,所述鞋托支架2设置在每一层的鞋柜框架1上,所述鞋托3放置在鞋托支架2上,该鞋托3的底部设有磁铁,所述连杆机构包括上连杆41和下连杆42,并设置在鞋柜框架1的两侧上下方,所述每个上连杆41和下连杆42的两端通过设置固定杆43连接,两个所述上连杆41之间设置上滑杆44连接,两个所述下连杆42之间设置下滑杆45连接,所述上滑杆44和下滑杆45的两端分别可滑动设置在固定杆43上并能在固定杆43上前后滑动,该上滑杆44的一端设置有与上连杆41连接的第一电机7,用于带动上连杆41的运动,所述下滑杆45位于鞋柜最底层的下方,所述磁吸机构5可滑动的设置在竖向滑杆51上,该竖向滑杆51竖向设置并分别与上滑杆44、下滑杆45滑动连接,该竖向滑杆51的顶部设有第二电机8带动竖向滑杆51的运动,所述传送机构6设置在鞋柜框架1的前侧下方,该传送机构6通过设置电动推杆9与鞋柜框架1后侧连接,且该电动推杆9位于最底层鞋托支架的下方,所述控制系统设置在鞋柜框架1上并与电源连接,且该控制系统分别与第一电机7、第二电机8、电动推杆9、磁吸机构5、传送机构6连接并控制运动。本发明的鞋柜设置摆放区域与传送机构,将鞋子从鞋柜上取出或者从使用者脚下送回鞋柜,也可以将鞋子从鞋托上运送至使用者脚下,该鞋柜还能让鞋子从鞋柜上自动放置在使用者脚下并摆好鞋的方向,使得使用者能够快速穿上,满足对空间利用效率高、执行机构能在鞋柜当中顺利运行的要求,鞋柜还要满足易于拆装,稳定可靠的要求;而且无需设置任何按钮与遥控对鞋柜进行操控,提高使用者在使用过程中的效率,若使用者操作鞋柜时还需要寻找鞋子与按钮或者其他控制装置,将会大大增加使用时间。
如图2所示,为鞋柜电控系统的原理图,该鞋柜上还设有语音模块,该语音模块控制系统连接并通过语音模块触发控制系统控制整个鞋柜的运作,其中控制系统采用Arduino Mega 2560作为控制核心,取用了板载IIC、两路PWM输出端口、串口通信与9路普通I/O口控制;采用16路PCA9685舵机控制板为连杆滑块机构、平行四边形机构舵机提供信号,每路舵机配备一个XL4005大功率电源模块;总电源为220V 180W开关电源,控制系统和语音模块均为现有技术。
在鞋柜框架1上还可设置红外人体感应模块,红外人体感应模块设置在鞋柜上方,感应范围为探头方2m半圆周内。当使用者开门或者出门进入感应区时,驱动电源开启,语音模块发出“您好主人,请叫我鞋宝”的提示音。当人离开家门或进入室内后,驱动电源断开,减小待机功率,节省电能。
语音模块设置在机架中部,功能为与使用者进行信息交互,向中控系统发送取鞋送鞋消毒等各种指令。语音模块的词条设置方式为通过电脑上位机软件对模块发送指令设置。
鞋柜框架1为铝合金材质,鞋柜框架1的左侧和后侧在每一层上设置竖梁11和横梁12,其中后侧的横梁12上垂直设置有向前延伸的竖梁11,所述鞋托支架水平设置在竖梁11上;鞋托支架2为在竖梁11上设置两根横向的支轴而成;鞋托3的边沿设有若干个挂件31。鞋托3为设置挂件31的木板,该木板为桐木,厚度为10mm,长度为360mm,宽度为260mm,长度设计依据是国标GB/T3294-1998中44的内部尺码(270mm)加上平均厚度(90mm),宽度设计依据是一双鞋子平均宽度(220mm)加上鞋间空隙(40mm);鞋托的底面中部设有引磁片,引磁片材质为不锈铁,厚度为0.9mm,长度为65mm,宽度为45mm,考虑到鞋盒放上鞋子后重心分布,引磁片将贴在木板的几何中心处,作用是与2.2.4中的磁吸机构相互作用,完成吸附动作;挂件31为杆状,其材质为PLA。
传送机构6包括舵机61、下层架62和上层架63,所述舵机61与电动推杆9连接,所述下层架63设置在舵机61上方,所述上层架62通过铰接杆连接下层架形成等角速度铰链四杆机构,所述上层架62的上表面设有与挂件适配的挂槽,挂槽为U型槽,将杆状的挂件恰好放入挂槽中。该传送机构上采用了5个舵机,型号为MG99515KG(1.5N■M),利用等角速度铰链四杆机构保持鞋盒始终与地面平行并能实现升降功能,连架杆长度为110mm,连杆长度为172mm,升降高度为150.779mm。另外位于底部的舵机完成调整鞋的方向的功能,使得使用者能够快速穿上。
电动推杆的参数为行程500mm,整体完全缩回长度为655mm,完全伸出中心距为1155mm,在12V电压下的运行速度为100mm/s,此速度运行下的最大推力为50N。
上连杆41和下连杆42的结构一致,所述上连杆41包括前杆46、后杆47、滑动件48,所述后杆的一端可转动连接在鞋柜框架上,另一端与前杆46铰接,该前杆46的前度则铰接在滑动件48上,所述滑动件48的下部设有穿孔,所述固定杆43穿过该穿孔设置,所述第一电机7设置在上连杆41的滑动件上。第一电机7、第二电机8和第三电机53可以是直线电机,能够驱动所在的滑动件48直线前后运动。
其中连杆机构还可设置成Y轴连杆滑块驱动系统,Y轴连杆滑块驱动系统由MG99520KG(2N■M)舵机与金属舵盘组成,为保证四根固定杆上滑动件的同步运行,系统采用四组连杆滑动件驱动而成。Y轴连杆滑块机构采用四组连杆滑块机构驱动Y轴,连架杆与连杆长度均为270mm,由销钉连接,输出轴与滑块中心位于同一平面。
上滑杆44和下滑杆45上均设有所述滑动件48,并通过滑动件48竖向固定竖向滑杆51,所述第二电机8设置在上滑杆44的滑动件48上并与竖向滑杆51连接,该第二电机8驱动滑动件48的运动,在控制系统的控制下,第二电机带动竖向滑杆51左右移动,从而带动磁吸机构5在横向方向上的位移。
其中上滑杆、下滑杆和竖向滑杆的连接还可以通过设置X-Z轴进步电机驱动系统控制,X-Z轴步进电机驱动系统由57步进电机、MXL/2GT同步带、同步轮与常开式机械限位开关组成。X-Z步进电机采用1.2N■M 57步进电机,步距角为1.8°。在驱动器1600细分设置下,单片机发送1600个脉冲电机转动一圈;同步轮为型号为GT2,齿数为20齿;同步带型号为2GT,X轴安装长度为649mm,Z轴安装长度为740mm;限位开关作用是设置X-Z轴零点。步进电机输出轴转动360°时,同步带移动40mm,距离公式为:S/40=P。其中S为移动距离,P为主控发送给步进电机控制器的脉冲数。
在匀速模式下实测启动时整个系统瞬间加速度为8m/s
磁吸机构5包括夹持部52、第三电机53、直角支架54、电磁铁55和紫外灯56,所述夹持部52夹持在竖向滑杆51上,所述第三电机53设置在夹持部内控制夹持部52在竖向滑杆51上移动,所述直角支架54水平设置在夹持部52上,并使自由端与竖向滑杆51垂直,直角支架54的自由端呈圆形端部,所述电磁铁55设置在圆形端部的上表面,电磁铁55的吸力为20kg,所述紫外灯56设置在圆形端部的下表面。紫外灯上连接有继电器,因紫外线对人体具有一定的伤害,在机器调试过程中采用蓝紫色0.5W LED灯模拟紫外线灯管。为了利用一个灯管对所有的鞋子进行扫描消毒,灯管安装在磁吸机构下方,利用磁吸机构的空间移动性对所有鞋子进行消毒。
工作原理:当使用者需要放鞋的时候,走进鞋柜,红外感应系统感应到人员靠近,进行通电反应,使用者通过语音出发语音模块,已经设定好的某个鞋托已经确定好的识别语音,通过语音模块出发控制系统控制各个部件运作,先是第三电机53控制磁吸机构在竖向滑杆51上移动,移动至该鞋托的那一层后停止,然后由第二电机8控制整个竖向滑杆51水平移动至对应鞋柜的那一列,由第一电机7运转,带动连杆机构4的缩回,使上滑杆44和下滑杆45同时向鞋柜内侧移动,并带动磁吸机构5向里运动,当运动到磁吸机构5上的电磁铁位于鞋托中部下方时停止,通过控制系统出发电磁铁通电产生磁性,第三电机53带动整个磁吸机构向上运动,电磁铁接触鞋托底部的引磁片吸住后,第一电机7运转带动整个磁吸机构5向外运动,并水平移动到中部,磁吸机构5带动鞋托下滑,使鞋托恰好位于传送机构6上,传送机构6中的电动推杆9受控制系统的控制推出后,舵机运转使上层架向前移动,上层架通过等角速度铰链四杆机构向前方滑下,使鞋托的底部与地面接触,使用者直接站上去脱鞋后,上层架向上滑动,电动推杆回收,磁吸机构将鞋托带着鞋子重新运送回该鞋托原来的位置。当需要取鞋时,同样的运转原理。
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以作出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
- 一种全自动智能鞋柜
- 一种全自动智能存取鞋柜