一种基于Ethercat总线式电液伺服阀
文献发布时间:2023-06-19 09:49:27
技术领域
本发明涉及一种基于Ethercat总线式电液伺服阀,属于高端液压元件领域。
背景技术
电液伺服阀是电液伺服控制中的关键元件,它是一将电流信号转化为液压流量或压力的液压控制阀。电液伺服阀具有动态响应快、控制精度高、使用寿命长等优点,已广泛应用于航空、航天、舰船、冶金、化工等领域的电液伺服控制系统中。电液伺服阀作为液压伺服机构的核心控制元件,目前传统的电液伺服阀还是接受模拟电流驱动,使用时每个伺服阀需要配备一个专门的驱动电路板,驱动电路板与电液伺服阀通常距离较长,且在多缸协同的应用场景,存在布线困难、系统结构复杂、抗干扰能力差、信息化程度低,无法联网监控等一系列问题。即使传统现场总线方案能够解决上述问题,但其实时性和高延时性还是不能满足工业控制要求。
发明内容
本发明的目的在于克服现有技术中的不足,提供了一种基于Ethercat总线式电液伺服阀,解决现有技术中布线困难、监控能力不足、实时性低、高延时性等问题。
为解决上述技术问题,本发明是采用下述技术方案实现的:
一种基于Ethercat总线式电液伺服阀,包括壳体、设于壳体内的电路板、前置级喷嘴挡板阀、功率级滑阀和力矩马达;
所述电路板上集成有现场Ethercat从站控制器、MCU、伺服阀驱动单元以及支持POE功能的入口RJ45接口和出口RJ45接口;
所述伺服阀驱动单元通过力矩马达驱动前置级喷嘴挡板阀和功率级滑阀运动;
所述现场Ethercat从站控制器内部集成有至少两个用于处理Ethercat数据帧的PHY接口;所述其中一PHY接口通过入口RJ45接口与Ethercat主站双向通信连接,另一PHY接口通过出口RJ45接口与下一级Ethercat从站双向通信连接;
所述MCU用于监测阀内状态,并实现Ethercat通讯协议,根据现场Ethercat从站控制器下发的控制信息,向伺服阀驱动单元下发控制指令。
进一步的,所述MCU通过内部集成的SPI接口与所述现场Ethercat从站控制器双向通信连接。
进一步的,所述MCU内部集成有模数转换器,所述MCU通过模数转换器实现阀内状态信息采集。
进一步的,所述MCU内部集成有数模转换器,所述MCU通过数模转换器实现所述控制指令的下发。
进一步的,所述壳体包括阀主壳体和设于阀主壳体上的阀罩,所述电路板、力矩马达设于所述阀罩内,所述前置级喷嘴挡板阀和功率级滑阀设于所述阀主壳体内;所述阀罩上设有与入口RJ45接口和出口RJ45接口相适配的接口安装孔。
进一步的,还包括用于监测阀内状态信息的传感器,所述传感器包括阀芯位移传感器、阀内温度传感器及力矩马达线圈电流传感器。
与现有技术相比,本发明所达到的有益效果:现场Ethercat从站控制器、MCU、伺服阀驱动单元以及支持POE功能的入口RJ45接口和出口RJ45接口均集成于电路板上,相比传统的电液伺服阀,无需配备额外的供电、驱动器、控制器,电液伺服阀仅通过一根通用的网线,就完成了供电、监测、通信和驱动等功能,缩短了电液伺服阀的布线距离、使布线结构更加紧凑,本发明提供的电液伺服阀适用于特殊多缸协同场合,例如:四足液压机器人、液压调平系统等;并且由于Ethercat总线具有低延迟、高响应、高可靠性、通用互联性等特点,从而本发明还进一步保证了伺服阀的实时性和可靠性,也可以非常低成本地组建高性能的分散式运动控制系统;
MCU内部集成有模数转换器,将采集的模拟信号转换成数字信号传输EtherCAT从站控制器,相比传统的输出为模拟信号的位移传感器,本发明具有更高的控制精度、抗干扰性,从而改善了所应用系统中的控制性能和稳定性;
电液伺服阀内的阀芯位移传感器、阀内温度传感器及力矩马达线圈电流传感器,能够及时采集伺服阀内的阀芯位移、阀内温度、力矩马达线圈电流等状态信息传输给MCU处理,从而实现电液伺服阀自我故障诊断和预测维护。
附图说明
此处所说明的附图用来提供对本发明的进一步理解,构成本申请的一部分,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。
图1是根据本发明实施例提供的一种基于Ethercat总线式电液伺服阀的原理图;
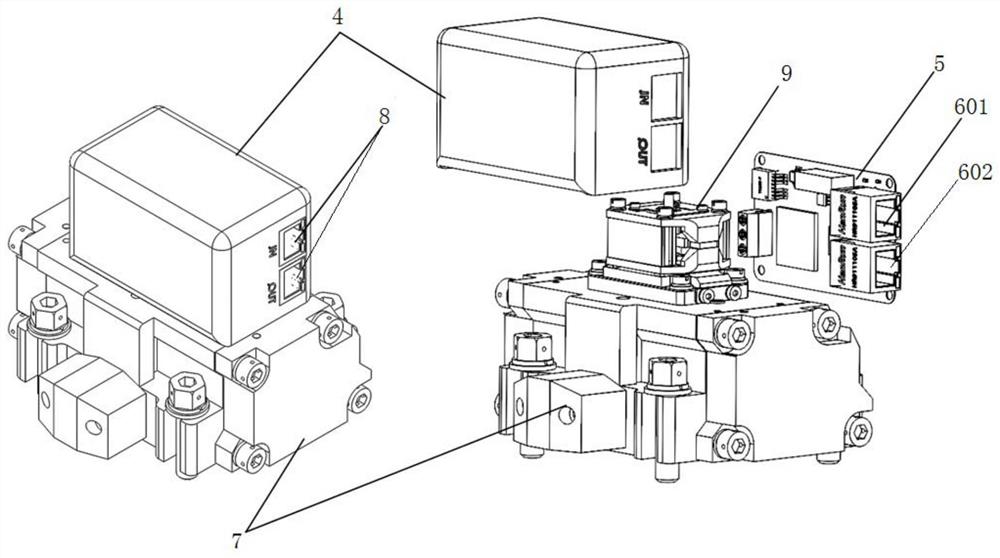
图2是根据本发明实施例提供的一种基于Ethercat总线式电液伺服阀的结构示意图;
图中:1.阀芯位移传感器、2、阀内温度传感器、3、力矩马达线圈电流传感器、4、阀罩、5、电液伺服阀控制电路、601、入口RJ45接口、602、出口RJ45接口、7、阀主壳体、8、接口安装孔、9、力矩马达、10、前置级喷嘴挡板阀、11、功率级滑阀。
具体实施方式
下面结合附图对本发明作进一步描述。以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本发明的保护范围。
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、 “底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”等的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以通过具体情况理解上述术语在本发明中的具体含义。
如图1、2所示,本发明实施例提供的一种基于Ethercat总线式电液伺服阀,包包括壳体、设于壳体内的电路板5、前置级喷嘴挡板阀10、功率级滑阀11和力矩马达9;
电路板上集成有现场Ethercat从站控制器、MCU、伺服阀驱动单元以及支持POE功能的入口RJ45接口601和出口RJ45接口602;当Ethercat主站通过POE功能的交换机和本发明中的入口RJ45接口601连接时,POE功能可以为本发明中的电路板5直接提供电源,同时也能传输Ethercat数据帧;当需要组网时,本发明的电路板5也可以通过出口RJ45接口602连接下一级设备的RJ45接口,这样选择性地也为下一级设备提供电源;
伺服阀驱动单元通过力矩马达9驱动前置级喷嘴挡板阀10和功率级滑阀运动11;伺服阀驱动单元能实现压流转换和功率转换,因此MCU输出的电压指令信号能通过服阀驱动单元转化为驱动力矩马达线圈的电流值,从而驱动前置级喷嘴挡板阀10和功率级滑阀11运动,实现电液转化;
现场Ethercat从站控制器内部集成有至少两个用于处理Ethercat数据帧的PHY接口;其中一PHY接口通过入口RJ45接口601与Ethercat主站双向通信连接,另一PHY接口通过出口RJ45接口602与下一级Ethercat从站双向通信连接;PHY接口负责处理Ethercat数据帧,并使用双端存储区实现Ethercat主站与从站本地应用的数据交换;
MCU用于监测阀内状态,并实现Ethercat通讯协议,根据现场Ethercat从站控制器下发的控制信息,向伺服阀驱动单元下发控制指令。
本发明实施例提供的基于Ethercat总线式电液伺服阀,MCU通过内部集成的SPI接口与现场Ethercat从站控制器双向通信连接。MCU通过SPI接口以串行或并行总线形式读取控制数据或传输状态信息。
本发明实施例提供的基于Ethercat总线式电液伺服阀,MCU内部集成有模数转换器, MCU通过模数转换器实现阀内状态信息采集。模数转换器接收传感器采集的模拟信号并转换成数字信号,通过SPI接口写入现场Ethercat从站控制器中的双端存储区,供Ethercat主站读取。
本发明实施例提供的基于Ethercat总线式电液伺服阀, MCU内部集成有数模转换器, MCU通过数模转换器实现所述控制指令的下发。数模转换器接收现场Ethercat从站控制器的数字控制信号并转换成模拟控制信号,再传输给伺服阀驱动单元,从而实现对力矩马达9的控制。
本发明实施例提供的基于Ethercat总线式电液伺服阀,壳体包括阀主壳体7和设于阀主壳体7上的阀罩4,所述电路板5、力矩马达9设于所述阀罩4内,所述前置级喷嘴挡板阀10和功率级滑阀11设于所述阀主壳体7内;所述阀罩4上设有与入口RJ45接口601和出口RJ45接口602相适配的接口安装孔8。在传统的电液伺服阀的阀罩4内部,嵌入了电路板5,只需一根通用的网线,就能构建总线式网络,在一些特殊多缸协同场合,采用本发明后的布线和结构更加紧凑,例如:四足液压机器人、液压调平系统等。
本发明实施例提供的基于Ethercat总线式电液伺服阀,还包括用于监测阀内状态信息的传感器,传感器包括阀芯位移传感器1、阀内温度传感器2及力矩马达线圈电流传感器3。但不限于此,本实施例中的传感器还可以包括流量传感器、压力传感器等,监测阀内进油量或回油量、压力等。
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种基于Ethercat总线式电液伺服阀
- 一种基于EtherCAT总线的工业嵌入式控制装置