煤矿无轨辅助运输机器人高冗余度多级安全保护装置
文献发布时间:2023-06-19 09:58:59
技术领域
本发明属于煤矿井下运输机器人设计制造技术领域,具体涉及一种煤矿无轨辅助运输机器人高冗余度多级安全保护装置。
背景技术
随着我国煤炭产业综采自动化技术、综掘系列装备等领域接连实现重大突破,建设全生产过程智能化、信息化、机器人化的智慧矿井已成为煤炭产业的发展方向。辅助运输系统是整个煤炭生产体系中的关键环节,其技术水平和作业效率直接关系到煤矿生产减人增效目标的达成。实现井下物料标准化装载、智能化配送、自动化转运和无人化运输的连续型辅助运输工艺是智慧矿井建设的必要条件和技术支撑。而当前现有的煤矿辅助运输系统难以适应智能综采工作面、无人掘进工作面等的发展需求,亟需发展结合清洁动力、物联网和自动驾驶等技术的智能辅助运输系统,弥补智慧矿山建设的辅运短板。煤矿无轨辅助运输机器人是矿井智能辅助运输系统的配套装备。在煤矿井下深部受限空间内,通过机器视觉、无线通信、惯性导航、人工智能等技术,实现可靠的环境感知、精确的定位导航和快速的路径规划等功能,以完成矿井下物料运输的自动化和无人化。煤矿无轨辅助运输机器人需要在煤矿井下完成长距离物料运输工作,与其它井下设备相比,行驶速度相对较快,作业范围广,对安全性和可靠性要求较高。根据煤矿井下的安全要求,井下运输设备和车辆必须设置安全保护系统,现有的车载安全保护装置主要针对有人驾驶车辆设计,其保护功能的涵盖范围和信息化水平难以满足无轨辅助运输机器人的使用需求。将煤矿井下设备的保护系统和智能化传感技术相结合,针对无轨辅助运输机器人的结构特点和使用工况,设计一款安全冗余度高,智能化水平先进的保护装置,对煤矿无轨辅助运输机器人的实际应用,推动矿井智能辅助运输系统的建设具有重要意义。
发明内容
本发明克服现有技术存在的不足,为了保障机器人在井下进行运输作业时的安全性,提供了一种煤矿无轨辅助运输机器人高冗余度多级安全保护装置。
为了解决上述技术问题,本发明采用的技术方案为:一种煤矿无轨辅助运输机器人高冗余度多级安全保护装置,其通过生成不同优先级的安全指令,实现保护措施的分级响应,所述安全指令包括:预测监控级、报警降速级、紧急制动级、整机断电级四个优先级;所述多级安全保护装置包括:
状态监测保护系统:包括本安型保护主机和多个本安型状态监测传感器,所述本安型保护主机用于接收并处理所述状态监测传感器得到的辅助运输机器人的运行状态参数,然后发送给所述整机控制器;
防碰撞实时监控系统:包括防爆毫米波雷达组和激光测距探头组,用于监控辅助运输机器人与巷道壁和障碍物的距离数据,并发送给整机控制器;
感知融合预警系统:包括激光雷达、深度相机和高性能图形处理器,所述激光雷达和深度相机用于实时获取巷道环境的点云信息、视频图像和深度数据并发送给所述高性能图形处理器,高性能图形处理器用于根据接收的数据进行计算分析和数据融合,确定机器人行驶路线上可探测范围内的障碍物信息,提取出关键距离数据后发送给所述整机控制器;
整机控制器:用于接收所述状态监测保护系统和感知融合预警系统实时发送的数据,生成预测监控级或报警降速级的安全指令;还用于根据所述防碰撞实时监控系统发送的距离数据,生成紧急制动级的安全指令,并下发至对应的执行部件执行制动停车和紧急避障动作;以及用于在巷道瓦斯浓度数据超过安全阈值时,生成整机断电级的安全指令,控制运输机器人的电池管理单元切断整机供电,同时实施制动抱死动作。
所述辅助运输机器人底盘四角分别设置有一个隔爆型传感器箱,底盘前后分别设置有一个位于中线上的隔爆控制箱;
所述防碰撞实时监控系统中,激光测距探头组包括八个激光测距探头,两两布置在其中一个隔爆型传感器箱中,用于监控机器人与巷道壁或其他障碍物的安全距离,防爆毫米波雷达组包括四个防爆毫米波雷达,分别布置在辅助运输机器人底盘四个侧面的中心位置,分别用于监控前、后、左、右四个方向上障碍物与机器人的安全距离;
所述感知融合预警系统包括十个深度相机和两个激光雷达;其中八个深度相机分别两两布置在其中一个隔爆型传感器箱中,另外两个深度相机分别布置在一个隔爆控制箱中,并位于辅助机器人底盘的前端和后端中线上;所述两个激光雷达分别设置一个隔爆控制箱中,其激光点阵透过位于隔爆控制箱上表面的环形隔爆玻璃面进行探测工作,用于获取辅助运输机器人上方的环境点云图像。
所述隔爆型传感器箱的截面为对称五边形结构,位于对称线上的第一条边对应的侧面用于将隔爆型传感器箱固定在辅助运输机器人的底盘上,其余四条边所对应的侧面均设置有防爆玻璃,靠近第一条边的两条第二条边对应的侧面设置的防爆玻璃用于设置深度相机,远离第一条边的两条第三条边对应的侧面互相垂直,其上设置的防爆玻璃用于设置激光测距探头,且两条第三条边分别与机器人行走方向垂直和平行。
所述整机控制器、本安型保护主机和高性能图形处理器均设置在所述隔爆控制箱中。
所述本安型状态监测传感器包括本安型甲烷传感器、本安型压力传感器、本安型液位传感器、本安型温度传感器、本安型转速传感器,所述本安型甲烷传感器用于采集巷道瓦斯浓度数据;本安型压力传感器用于采集机器人液压系统工作压力;本安型液位传感器用于采集油箱和水箱的液位数据;本安型温度传感器用于采集制动、冷却和动力部件的温度数据;本安型转速传感器用于采集电机转速数据和车轮转速数据。
所述本安型保护主机还用于对所述本安型状态监测传感器的采集数据进行计算处理,并对故障进行预判。
感知融合预警系统还包括设置在所述隔爆控制箱中的数据交换机和高速以太网LAN总线;所述深度相机和激光雷达通过高速以太网LAN总线与数据交换机连接,所述数据交换机与所述高性能图形处理器连接。
本发明与现有技术相比具有以下有益效果:本发明实施例提供了一种煤矿无轨辅助运输机器人高冗余度多级安全保护装置,该装置包括状态监测保护系统、防碰撞实时监控系统、融合感知预警系统和整机控制器,可实现环境瓦斯浓度监测、巷道行驶环境感知、障碍物距离信息反馈、人员及车辆接近预警、系统运行状态诊断等功能,可为煤矿无轨辅助运输机器人提供高冗余度的安全保护功能,并利用保护措施的分级响应功能,具备在一般情况下对系统安全的感知预警能力和在紧急情况下快速有效执行避险动作的能力,为煤矿辅助运输机器人在井下的实际应用提供了一种有效的安全保护装置。在执行安全保护功能时,该保护装置将采集信息进行计算处理,根据安全威胁程度,将保护动作指令划分为四个层级:预测监控级、报警降速级、紧急制动级和整机断电级,实施保护措施的分级响应,实现在一般情况下对系统安全的感知预警,以及在紧急情况下避险动作的快速执行。本发明对保障煤矿无轨辅助运输机器人作业安全、实现智能无人运输装备在煤矿井下应用、推动煤矿辅助运输系统智能化和无人化建设具有重要意义。
附图说明
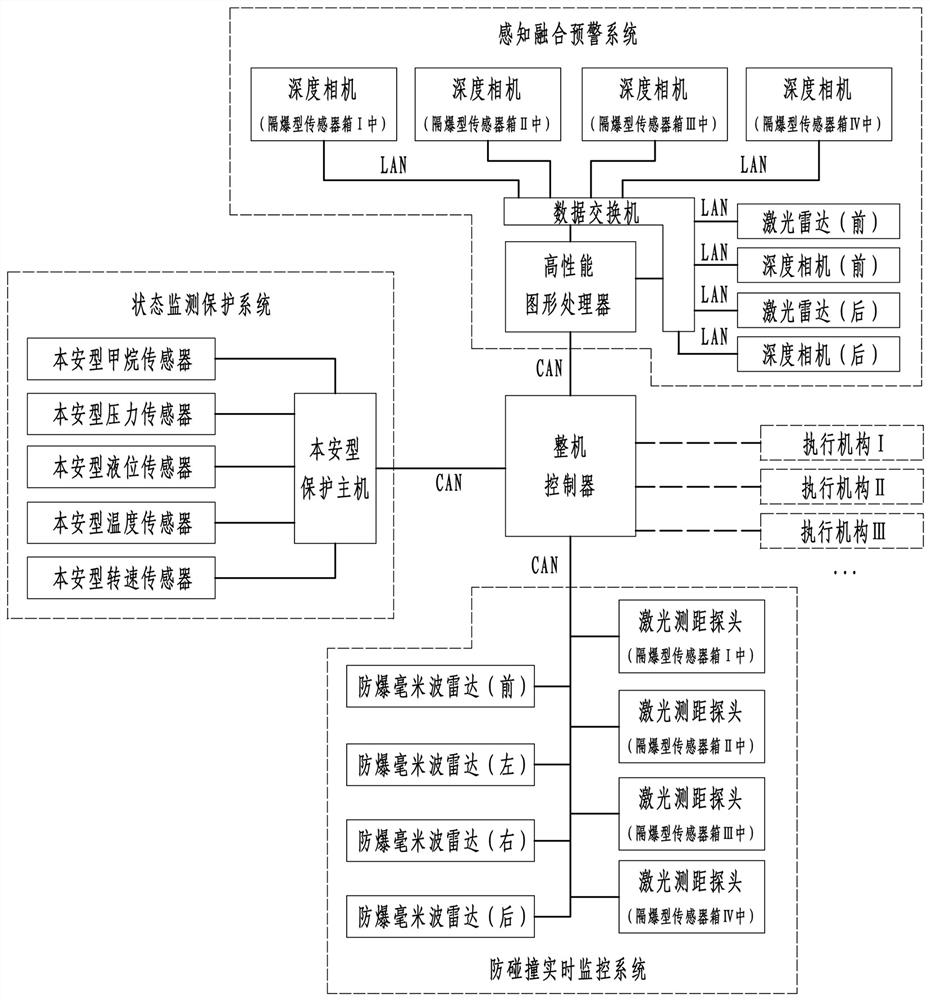
图1为本发明实施例提供的一种无轨辅助运输机器人高冗余度安全保护装置结构框图;
图2为本发明实施例中冗余度安全保护装置在辅助运输机器人底盘上的布置图;
图3为本发明实施例主要安全探测传感器的分布图;
图4为本发明实施例中隔爆型传感器箱的结构示意图;其中a为其剖面示意图,b为其立体示意图;
图5为本发明实施例中防碰撞实时监控系统工作情况示意图;
图6感知融合预警系统中激光雷达工作情况示意图;
图7感知融合预警系统中深度相机群探测工作示意图。
图中:15为隔爆型控制箱,16为辅助运输机器人底盘,17为隔爆型传感器箱,18为数据交换机,19为高性能处理器,20为整车控制器,21为本安型保护主机,22为安全型防爆线控制动装置,23为防爆玻璃,24为深度相机,25为激光测距探头,26为防爆玻璃安装座,27为照明补光灯,28为深度相机调整底座(可沿中心旋转),29为激光雷达,30为防爆毫米波雷达,31为本安型甲烷传感器, 37为高性能图形处理器,38为数据交换机,39为本安型保护主机,84为隔爆箱盖,85为连接螺栓,86为出线喇叭嘴。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例;基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
如图1~6所示,本发明实施例提供了一种煤矿无轨辅助运输机器人高冗余度多级安全保护装置,其通过整机控制器生成不同优先级的安全指令,实现保护措施的分级响应,所述安全指令包括:预测监控级、报警降速级、紧急制动级、整机断电级四个优先级;如图1所示,所述多级安全保护装置包括:状态监测保护系统,防碰撞实时监控系统,感知融合预警系统和整机控制器。上述三个子系统在工作时相互配合、互相支撑、互为补充,为煤矿无轨辅助运输机器人在井下作业提供可靠的安全保障,同时若保护装置中某一传感器或一个子系统功能失效,其余子系统具备独立提供安全保护的能力,仍然可以通过各自的安全机制执行保护动作,保障作业安全 ,实现高冗余度的安全保护功能,可满足煤矿无轨辅助运输机器人对高可靠性和安全性的要求。
本实施例中,状态监测保护系统、防碰撞实时监控系统和融合感知预警系统三个子系统分别对所采集信息进行计算处理后发送给整机控制器,整机控制器根据安全威胁程度,生成不同优先级的安全指令,实现保护措施的分级响应功能,因此,本发明具备在一般情况下对系统安全的感知预警能力和在紧急情况下快速有效执行避险动作的能力。所述的安全指令划分为四个层级:(1)预测监控级;(2)报警降速级;(3)紧急制动级;(4)整机断电级,其优先级依次升高。预测监控级和报警降速级的安全指令由整机控制器生成后,下发给各个对应的执行单元,以实现状态监测、安全预警和整机降速等功能;防爆毫米波雷达和激光测距探头实时采集的安全距离信息并通过专用的系统总线发送整机控制器,当数值低于设定的安全阈值时,整机控制器直接生成紧急制动级的安全指令,下发给对应的执行单元,立即执行制动停车和紧急避障动作,保障人员和设备安全;整机断电级的安全指令同样由整机控制器直接生成,主要根据本安型甲烷传感器采集的巷道瓦斯浓度数据,在数值超过设定的安全阈值,系统工作可能引燃环境瓦斯的情况下,直接控制电池管理单元切断整机供电,实施制动抱死等动作,具备最高的执行优先权。
如图2~3所示,本发明实施例中,所述辅助运输机器人底盘16四角分别设置有一个隔爆型传感器箱17,底盘前后分别设置有一个位于中线上的隔爆控制箱15。
具体地,如图1所示,本实施例中,状态监测保护系统包括本安型保护主机和多个本安型状态监测传感器,所述本安型保护主机用于接收并处理所述状态监测传感器得到的辅助运输机器人的运行状态参数,然后发送给所述整机控制器。具体地,所述本安型保护主机还用于对所述本安型状态监测传感器的采集数据进行计算处理,并对故障进行预判,得到关键的运行状态参数后发送给所述整机控制器。
具体地,本实施例中,所述本安型状态监测传感器包括本安型甲烷传感器、本安型压力传感器、本安型液位传感器、本安型温度传感器、本安型转速传感器,所述本安型甲烷传感器用于采集巷道瓦斯浓度数据;本安型压力传感器用于采集机器人液压系统工作压力;本安型液位传感器用于采集油箱和水箱的液位数据;本安型温度传感器用于采集制动、冷却和动力部件的温度数据;本安型转速传感器用于采集电机转速数据和车轮转速数据。
具体地,如图1所示,本实施例中,防碰撞实时监控系统包括防爆毫米波雷达组和激光测距探头组,用于监控辅助运输机器人与巷道壁和障碍物的距离数据,并发送给整机控制器。
进一步地,本实施例中,所述防碰撞实时监控系统中,激光测距探头组包括八个激光测距探头,两两布置在其中一个隔爆型传感器箱中,用于监控机器人与巷道壁或其他障碍物的安全距离,防爆毫米波雷达组包括四个防爆毫米波雷达,分别布置在辅助运输机器人底盘四个侧面的中心位置,分别用于监控前、后、左、右四个方向上障碍物与机器人的安全距离。所述整机控制器、本安型保护主机和高性能图形处理器均设置在所述隔爆控制箱中。同时为满足防爆要求,整机控制器放置于隔爆型控制箱15中。
具体地,如图1所示,本实施例中,感知融合预警系统包括激光雷达、深度相机和高性能图形处理器,所述激光雷达和深度相机用于实时获取巷道环境的点云信息、视频图像和深度数据并发送给所述高性能图形处理器,高性能图形处理器用于根据接收的数据进行计算分析和数据融合,确定机器人行驶路线上可探测范围内的障碍物信息,对行驶路径的安全性进行评估,并根据评估结果提取出关键距离数据后发送给所述整机控制器。
进一步地,如图2~3所示,所述感知融合预警系统包括十个深度相机和两个激光雷达;其中八个深度相机分别两两布置在其中一个隔爆型传感器箱17中,另外两个深度相机分别布置在一个隔爆控制箱15中,并位于辅助机器人底盘16的前端和后端中线上;所述两个激光雷达分别设置一个隔爆控制箱中,其激光点阵透过位于隔爆控制箱上表面的环形隔爆玻璃面进行探测工作,用于获取辅助运输机器人上方的环境点云图像。
进一步地,感知融合预警系统还包括设置在所述隔爆控制箱中的数据交换机和高速以太网LAN总线;所述深度相机和激光雷达通过高速以太网LAN总线与数据交换机连接,所述数据交换机与所述高性能图形处理器连接。
进一步地,如图4所示,本实施例中,所述隔爆型传感器箱17的水平截面为对称五边形结构,位于对称线上的第一条边对应的侧面用于将隔爆型传感器箱17固定在辅助运输机器人底盘16上,其余四条边所对应的侧面均设置有防爆玻璃23,靠近第一条边的两条第二条边对应的侧面设置的防爆玻璃23用于设置深度相机,远离第一条边的两条第三条边对应的侧面互相垂直,其上设置的防爆玻璃23用于设置激光测距探头25,且两条第三条边分别与辅助运输机器人行走方向垂直和平行。
此外,隔爆型传感器箱17内还设置有防爆玻璃安装座26、照明补光灯27和深度相机调整底座,防爆玻璃安装座26用于设置防爆玻璃,照明补光灯27用于为深度相机24提供照明补光,深度相机调整底座28用于安装深度相机,该底座可沿中心旋转,以调整深度相机的拍摄角度。此外,隔爆型传感器箱17上方外部设置有出线喇叭嘴86,用于将箱中信号隔爆输出。隔爆型传感器箱17上方通过隔爆箱盖84封闭,隔爆箱盖84通过连接螺栓85与箱体固定连接。
本实施例中,激光雷达29和深度相机24实时获取巷道环境的点云信息、视频图像和深度数据,通过高速以太网LAN总线实时传输给数据交换机后在传输给高性能图形处理器进行计算分析和数据融合,确定辅助运输机器人行驶路线上可探测范围内的障碍物信息,对行驶路径的安全性进行评估,然后提取出关键距离数据后发送给所述整机控制器,进而实现环境感知、路径规划、主动避障和紧急制动等功能。同时为满足煤矿防爆要求,四个防爆毫米波雷达设置在辅助运输机器人车身的前后左右四个侧面的中心处,分别用于监控前、后、左、右四个方向上障碍物与机器人的安全距离,其探测范围如图5所示,八个激光测距探头两两设置在位于四角的隔爆型传感器箱17中,用于测量车身四角位置处垂直以及平行于行走方向上的障碍物,两个激光雷达设置在隔爆控制箱15中,用于测量车身前后位置处上方的障碍物,激光测距探头和激光雷达的探测范围如图6所示,利用激光雷达探测范围广的特点,实现探测范围环车身全覆盖。八个深度相机24布置于隔爆型传感器箱17中,并根据煤矿无轨辅助运输机器人的外形特点将隔爆型传感器箱布置于底盘四角位置,每个箱体中设置有两个深度相机,隔爆型传感器箱17的箱体结构根据相机的视野角度进行设计,实现深度相机群对机器人需探测区域的覆盖,避免出现视野盲区、保障作业安全;此外,还有两个深度相机安装在位于机器人底盘前后两端的隔爆型主控制箱中,如图7所示,为这些深度相机组成的深度相机群的视野范围。结合图5~7可知,本实施例中,激光雷达29、深度相机24和防爆毫米波雷达实现了探测范围环车身全覆盖。
具体地,本实施例中,整机控制器用于接收所述状态监测保护系统和感知融合预警系统实时发送的关键运行状态参数和关键距离数据,并根据这些数据生成预测监控级或报警降速级的安全指令;还用于结合所述防碰撞实时监控系统发送的距离数据,生成紧急制动级的安全指令,并下发至对应的执行部件执行制动停车和紧急避障动作;以及用于在巷道瓦斯浓度数据超过安全阈值时,生成整机断电级的安全指令,控制运输机器人的电池管理单元切断整机供电,同时实施制动抱死动作。其中,这四个安全指令的优先级依次升高,若优先级级别低的安全指令与优先级高的安全指令同时出现,则执行优先级较高的安全指令。本发明实施例中,通过设置本安型保护主机和高性能图形处理器,可以对状态监测保护系统和感知融合预警系统中的传感数据进行提前处理,提取出其中的关键数据和有用数据后发送至整机控制器,降低了整机控制器的运算量,提高了系统的相应速度,整机控制器可以通过PLC实现整机控制。整机控制器通过专用的高速以太网LAN总线接收安全防撞监控系统提供的距离数据,根据提前设定的安全阈值,分级发布安全指令, 执行接近提醒、碰撞警告、主动降速和主动制动等保护动作。
综上所述,本发明实施例提供了一种煤矿无轨辅助运输机器人高冗余度多级安全保护装置,该装置包括状态监测保护系统、防碰撞实时监控系统、融合感知预警系统和整机控制器,可实现环境瓦斯浓度监测、巷道行驶环境感知、障碍物距离信息反馈、人员及车辆接近预警、系统运行状态诊断等功能,可为煤矿无轨辅助运输机器人提供高冗余度的安全保护功能,并利用保护措施的分级响应功能,具备在一般情况下对系统安全的感知预警能力和在紧急情况下快速有效执行避险动作的能力,为煤矿辅助运输机器人在井下的实际应用提供了一种有效的安全保护装置。
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
- 煤矿无轨辅助运输机器人高冗余度多级安全保护装置
- 基于煤矿无轨辅助运输机器人的传感器检测装置和系统