一种轮式抛光机床及其控制系统
文献发布时间:2023-06-19 10:05:17
技术领域
本发明属于光学平面、球面、非球面抛光技术领域,尤其涉及一种轮式抛光机床及其控制系统。
背景技术
随着人工智能、智能汽车的发展以及大国竞争更趋于高科技竞赛,作为人类眼睛的延伸——镜头在向更高精度、更大视角发展。非球面镜片作为优秀的光学设计方案中不可或缺的重要组成部分在逐步被设计者们利用起来,但是制造光学非球面难度较大,因此可以制作光学非球面镜片的抛光设备成为了关键问题。为达到抛光光学非球面的目的,必须实现多轴联动功能,为达到加工精度必须利用准对心加工方法。
现有技术中,部分技术人员采用一种龙门式五轴超声抛光机床,该机床通过超声波进行光学镜片的加工,超声波的制造成本较高,并且去除效率极低,无法满足快速生产的目的。还有技术人员公开了一种利用电流变效应抛光人工晶状体的装置及方法,该技术方案将磁流变液喷在轮上作为抛光膜进行加工,由于磁流变液属于专利保护产品或者保密产品,被全球为数不多的几家公司持有,因此磁流变液的价格较高,并且其加工效率较低,无法满足快速抛光光学费球面镜片的需要。
发明内容
针对上述技术问题,本发明的目的在于提出一种轻量化、低成本的光学非球面镜片抛光机床。本发明可以通过三轴联动的方式实现任意光学非球面镜片抛光轨迹,用以快速抛光非球面镜片并达到较高加工精度。
本发明通过以下技术手段解决上述问题:
一种轮式抛光机床,其特征在于,包括底座、Y轴控制单元、X轴控制单元、Z轴控制单元和H轴控制单元,其中:所述Y轴控制单元安装在底座上、且用于完成Y轴方向的精确移动,Y轴控制单元包括Y轴运动台、Y轴丝杠、Y轴导轨和Y轴电机,所述Y轴运动台的中部安装有所述Y轴丝杠,Y轴运动台通过两侧的Y轴导轨可移动的安装在底座上,所述Y轴电机安装在底座的一侧且用于驱动Y轴丝杠运动;所述X轴控制单元安装在Y轴控制单元上、且用于完成X轴方向的精确移动,X轴控制单元包括XY连接塔、X轴运动台、X轴丝杠、X轴导轨和X轴电机,所述XY连接塔安装在Y轴运动台上,所述X轴运动台通过X轴导轨可移动的安装在XY连接塔上,X轴运动台的中部安装有所述X轴丝杠,所述X轴电机安装在XY连接塔的一侧、且用于驱动X轴丝杠运动;所述Z轴控制单元安装在X轴控制单元上、且用于完成Z轴方向的精确移动,Z轴控制单元包括XZ连接座、Z轴运动台、Z轴丝杠、Z轴导轨和Z轴电机,所述XZ连接座安装在X轴运动台上,所述Z轴运动台通过两侧的Z轴导轨可移动的安装在XZ连接座上,Z轴运动台的中部安装有Z轴丝杠,所述Z轴电机安装在XZ连接座的一侧,且用于驱动Z轴丝杠运动;所述H轴控制单元安装在Z轴控制单元上、且用于完成抛光轮的精确控制,H轴控制单元包括ZH连接板、H轴电机、H轴皮带轮、H轴抛光轮和皮带驱动轴,所述ZH连接板固定在Z轴运动台上,所述H轴电机安装在ZH连接板的中部,H轴电机的转轴上设置有H轴皮带轮,H轴抛光轮安装在ZH连接板的末端,H轴抛光轮的转轴上安装有皮带驱动轴,H轴皮带轮通过皮带依次带动皮带驱动轴、H轴抛光轮准确旋转。
优选的,还包括竖直安装在底座上的C轴控制单元,所述C轴控制单元包括电机安装座、C轴旋转座、旋转工装台、工作台皮带轮、C轴电机和C轴皮带轮,其中:所述电机安装座通过法兰固定在底座上,所述C轴旋转座设置在电机安装座的一侧;所述旋转工装台通过轴承可旋转的安装在C轴旋转座上,旋转工装台的顶部设置有用于夹持镜片的工装夹具,旋转工装台的底部套设有用于传动的工作台皮带轮;所述C轴电机倒设在电机安装座上,C轴电机的转动轴上套设有C轴皮带轮,C轴皮带轮通过皮带驱动工作台皮带轮运动。
优选的,所述Y轴控制单元、X轴控制单元和Z轴控制单元的运动方向相互垂直、以组成笛卡尔坐标系。
优选的,还包括皮带轮张紧机构,所述皮带轮张紧机构设置在H轴皮带轮和H轴抛光轮之间。
根据上述轮式抛光机床的控制系统,其特征在于,包括上位机、下位机、Y轴驱动器、 X轴驱动器、Z轴驱动器、 H轴驱动器和C轴驱动器,其中:所述下位机一方面与上位机互连,下位机另一方面分别与Y轴驱动器、 X轴驱动器、Z轴驱动器、 H轴驱动器和C轴驱动器互连,所述Y轴驱动器用于驱动Y轴电机精准运动,所述X轴驱动器用于驱动X轴电机精准运动、所述Z轴驱动器用于驱动Z轴电机精准运动;所述H轴驱动器用于驱动H轴电机精准运动;所述C轴驱动器用于驱动C轴电机精准运动。
具体的,包括如下控制步骤:1)上位机生成X、Y、Z轴运动位置以及运动速度数据、并将X、Y、Z轴运动位置以及运动速度数据发送给下位机;
2)下位机接收X、Y、Z轴运动位置以及运动速度数据后、并对X、Y、Z轴运动位置以及运动速度数据进行数据插补,下位机生成完整的插补数据后向上位机发送完成状态信号;
3)上位机接收到完成状态信号后,向下位机发送加工信号;
4)下位机收到加工信号后,下位机将插补数据转换为PWM信号、并将PWM信号发送给对应的驱动器,驱动器分别控制各电机运动,下位机实时采集各电机的位置信息和转速信号以形成脱离上位机的闭环控制。
优选的,所述闭环控制采用PID控制方法,所述下位机采用STM32系列控制器。
本发明的一种轮式抛光机床及其控制系统具有以下有益效果:
本发明采用三个线性轴加载抛光轮的方式,只需要精确控制YZ或着XZ两个线性轴位置即可实现任意面型的光学非球面镜片的准对心抛光,减少了位置控制轴的数量、降低了机床制造成本。同时,采用抛光轮模块设计,可以通过更换不同抛光轮的模块,实现抛光工具快速更换,满足不同光学非球面镜片的加工需求,大幅提高加工效率。此外,还可以通过更换不同皮带轮的方法可以改变抛光轮以及C轴的最大转速,进而实现不同抛光效率的需求。最后,本发明可以通过脱离上位机的闭环控制方式进行加工,避免了上位机发生故障或死机导致的加工过程中光学非球面镜片损坏等风险,提高机床可靠性,同时闭环控制提高了加工的精度。
附图说明
为了更清楚地说明本发明的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
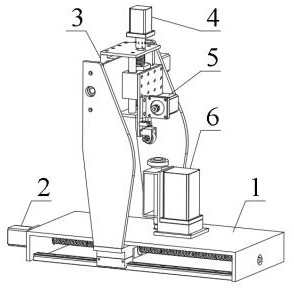
图1是本发明整体结构示意图;
图2是本发明Y轴控制单元结构示意图;
图3是本发明X轴控制单元结构示意图;
图4是本发明Z轴控制单元和H轴控制单元结构示意图;
图5是本发明C轴控制单元外部结构示意图;
图6是本发明C轴控制单元内部结构示意图;
图7是本发明控制系统结构示意图;
图8是本发明控制流程示意图;
图9是本发明可实现的双拐点非球面实例曲线。
其中,1-底座、2-Y轴控制单元、201-Y轴运动台、202-Y轴丝杠、203-Y轴导轨、204-Y轴电机、3-X轴控制单元、301-XY连接塔、302-X轴运动台、303-X轴丝杠、304-X轴导轨、305-X轴电机、4-Z轴控制单元、401-XZ连接座、402-Z轴运动台、403-Z轴丝杠、404-Z轴导轨、405-Z轴电机、5-H轴控制单元、501-ZH连接板、502-H轴电机、503-H轴皮带轮、504-H轴抛光轮、505-皮带驱动轴、506-皮带轮张紧机构、6-C轴控制单元、601-电机安装座、602-C轴旋转座、603-旋转工装台、604-工作台皮带轮、605-C轴电机、606-C轴皮带轮、7-上位机、8-下位机、9-Y轴驱动器、10-X轴驱动器、11-Z轴驱动器、12-H轴驱动器、13-C轴驱动器。
具体实施方式
在本发明的描述中,需要理解的是,术语“中心”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
以下将结合附图对本发明进行详细说明。
实施例一
如图1至图4所示,该轮式抛光机床包括底座1、Y轴控制单元2、X轴控制单元3、Z轴控制单元4和H轴控制单元5,图中,Y轴控制单元2安装在底座1上、且用于完成Y轴方向的精确移动,Y轴控制单元2包括Y轴运动台201、Y轴丝杠202、Y轴导轨203和Y轴电机204,,底座1底部设置有安装孔,用于安装Y轴导轨203和Y轴丝杠202,Y轴运动台201的中部安装有Y轴丝杠202,Y轴运动台201通过两侧的Y轴导轨203可移动的安装在底座1上,Y轴电机204安装在底座1的一侧且用于驱动Y轴丝杠202运动。
图3中,X轴控制单元3安装在Y轴控制单元2上、且用于完成X轴方向的精确移动,X轴控制单元3包括XY连接塔301、X轴运动台302、X轴丝杠303、X轴导轨304和X轴电机305,XY连接塔301安装在Y轴运动台201上,XY连接塔301上设置有安装孔和安装座用于固定X轴丝杠303和X轴导轨304,X轴运动台302通过X轴导轨304可移动的安装在XY连接塔301上,X轴运动台302的中部安装有X轴丝杠303,X轴电机305安装在XY连接塔301的一侧、且用于驱动X轴丝杠303运动。
图4中,Z轴控制单元4安装在X轴控制单元3上、且用于完成Z轴方向的精确移动,Z轴控制单元4包括XZ连接座401、Z轴运动台402、Z轴丝杠403、Z轴导轨404和Z轴电机405,XZ连接座401上设置用安装Z轴丝杠403和Z轴导轨404的开孔和孔座,XZ连接座401安装在X轴运动台302上,Z轴运动台402通过两侧的Z轴导轨404可移动的安装在XZ连接座401上,Z轴运动台402的中部安装有Z轴丝杠403,Z轴电机405安装在XZ连接座401的一侧,且用于驱动Z轴丝杠403运动。H轴控制单元5安装在Z轴控制单元4上、且用于完成抛光轮的精确控制,H轴控制单元5包括ZH连接板501、H轴电机502、H轴皮带轮503、H轴抛光轮504和皮带驱动轴505,ZH连接板501固定在Z轴运动台402上,H轴电机502安装在ZH连接板501的中部,H轴电机502的转轴上设置有H轴皮带轮503,H轴抛光轮504安装在ZH连接板501的末端,H轴抛光轮504的转轴上安装有皮带驱动轴505,H轴皮带轮503通过皮带依次带动皮带驱动轴505、H轴抛光轮504准确旋转。
具体的,Y轴控制单元2、X轴控制单元3和Z轴控制单元4的运动方向相互垂直、以组成笛卡尔坐标系。H轴控制单元5还包括皮带轮张紧机构506,皮带轮张紧机构506设置在H轴皮带轮503和H轴抛光轮504之间。
需要说明的是,本实施例共有X、Y、Z三个线性轴以及C转轴,将Y轴电机和Y轴导轨固定于机床床身上,Y轴丝杠与YX连接塔连接,通过控制Y轴电机实现控制YX连接塔沿Y轴运动。X轴导轨与X轴丝杠固定于YX连接塔上。X轴丝杠与XZ连接塔连接,通过控制X轴电机实现控制ZX连接塔沿X轴移动。Z轴导轨与Z轴丝杠固定于XZ连接塔上。Z轴丝杠与ZH连接塔连接,通过控制Z轴电机实现控制ZH连接塔沿Z轴方向移动。H轴电机与抛光轮模块固定于ZH连接塔上,抛光轮固定于抛光轮模块上,可以绕抛光轮轴转动,抛光轮轴向与X轴平行。抛光轮上沾附抛光聚氨酯(或其他材质)抛光膜。抛光轮通过皮带轮与H轴电机连接,实现径向转动,皮带张紧机构固定于ZH连接塔上,通过控制XYZ电机可以实现抛光轮沿XYZ方向移动实现光学非球面镜片加工。
实施例二
如图5和图6所示,还包括竖直安装在底座1上的C轴控制单元6,C轴控制单元6包括电机安装座601、C轴旋转座602、旋转工装台603、工作台皮带轮604、C轴电机605和C轴皮带轮606,其中:电机安装座601通过法兰固定在底座1上,C轴旋转座602设置在电机安装座601的一侧;旋转工装台603通过轴承可旋转的安装在C轴旋转座602上,旋转工装台603的顶部设置有用于夹持镜片的工装夹具,旋转工装台603的底部套设有用于传动的工作台皮带轮604;C轴电机605倒设在电机安装座601上,C轴电机605的转动轴上套设有C轴皮带轮606,C轴皮带轮606通过皮带驱动工作台皮带轮604运动。
具体的,C轴控制单元6也可以配置皮带张紧机构。
需要说明的是,C轴电机与C轴通过皮带轮连接,C轴电机转动带动C轴转动,C轴上连接工装夹具,用以夹持非球面镜片。C轴电机与C轴固定于机床床身上。
实施例三
如图7所示,轮式抛光机床的控制系统包括上位机7、下位机8、Y轴驱动器9、 X轴驱动器10、Z轴驱动器11、 H轴驱动器12和C轴驱动器13,其中:下位机8一方面与上位机7互连,下位机8另一方面分别与Y轴驱动器9、 X轴驱动器10、Z轴驱动器11、 H轴驱动器12和C轴驱动器13互连,Y轴驱动器9用于驱动Y轴电机204精准运动,X轴驱动器10用于驱动X轴电机305精准运动、Z轴驱动器11用于驱动Z轴电机405精准运动;H轴驱动器12用于驱动H轴电机502精准运动;C轴驱动器13用于驱动C轴电机605精准运动。
具体的,下位机8采用STM32系列控制器,驱动器采用TMC系列芯片控制。
需要说明的是,控制系统通过上位机计算抛光轨迹以及驻留时间,并生成数据。将“数据”发送到下位机控制器上,控制器会自动生成插补后的“数据”,当插补后的“数据”生成完成后,下位机会返回“完成状态信号”到上位机。上位机收到“完成状态信号”后,可以控制下位机开始加工。当下位机收到“加工信号”后会判断是否已经向上位机发送“完成状态信号”,如果已经发送“完成状态信号”则进行加工,否则等待。当下位机开始加工时,会将“数据”转换为pwm信号并发送到驱动器,驱动器将“位置信号”返回给下位机,从而形成脱离上位机闭环控的加工,驱动器驱动XYZH电机运动实现光学非球面镜片加工。
实施例四
如图8所示,抛光机床的控制系统包括如下控制步骤:1)上位机7生成X、Y、Z轴运动位置以及运动速度数据、并将X、Y、Z轴运动位置以及运动速度数据发送给下位机8;
2)下位机8接收X、Y、Z轴运动位置以及运动速度数据后、并对X、Y、Z轴运动位置以及运动速度数据进行数据插补,下位机8生成完整的插补数据后向上位机35发送完成状态信号;
3)上位机7接收到完成状态信号后,向下位机8发送加工信号;
4)下位机8收到加工信号后,下位机8将插补数据转换为PWM信号、并将PWM信号发送给对应的驱动器,驱动器分别控制各电机运动,下位机实时采集各电机的位置信息和转速信号以形成脱离上位机35的闭环控制。
具体的,闭环控制采用PID控制方法。
需要说明的是,上位机生成X、Y、Z轴运动位置以及运动速度数据,并将数据发送给下位机产生插补后的数据(机床的数据插补,直线插补或者圆弧插补),插补数据生成后会向上位机发送完成状态信号。当上位机向下位机发送加工信号时(一个高电平或者低电平),下位机)判断是否向上位机发送了完成状态信号,如果发送过完成状态信号,上位机向下位机发送加工信号,将插补后的数据转换为PWM信号发送给各轴的驱动器,驱动器分别控制各电机运动;否则等待完成状态信号发送完成。X,Y,Z三个运动轴的驱动器会向下位机发送位置信号从而形成脱离上位机的闭环控制。
实施例五
如图9所示,本抛光机床具有加工双拐点非球面的能力,抛光轮的位置可以根据抛光非球面面型不同而灵活调整,以保证抛光轮与非球面抛光点的法向量与抛光轮径向方向始终一致,以达到抛光多拐点非球面精确面形修正的技术目的。
最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
- 一种轮式抛光机床及其控制系统
- 一种轮式抛光机床及其控制系统