大臂机构
文献发布时间:2023-06-19 10:27:30
技术领域
本发明涉及机械传动技术领域,具体领域为大臂机构。
背景技术
随着我国城市化的迅速发展,城市排水系统的建造规模也在进一步扩大。而现有的城市排水主要靠地下管道、箱涵来疏通。这类排水方式在长时间的积累中必然会导致淤泥沉积,逐渐出现管道、箱涵堵塞、污水溢流等各种情况。尤其在汛期,城市排水不通,这种淤泥沉积所致的路面严重积水,甚至导致该路段的交通中断,严重影响市民的生活、生产、污染环境,给社会经济造成了巨大损失。一个城市发展快慢程度其主要还依赖于城市排水系统。因此必须定期清理城市的排水管道、箱涵,对于城市环境保护、避免污染、维护城市的市容、提高市民的生活质量有着十分重要的意义。然而,城市排水管道、箱涵中环境恶劣,其还含有一些有毒气体,采用人工清理易对人身安全造成危害。因此就有了清淤机器人。
现有的清淤机器人上的两侧大臂一般都通过单个油缸驱动,单个油缸不利于整体机器人的平衡,无法保证可靠的运行,从而在清理管道、箱涵中的淤泥时,费时费力。
发明内容
本发明的目的在于提供大臂机构,以解决上述背景技术中提出单个油缸不利于整体机器人的平衡,无法保证可靠的运行,从而在清理管道、箱涵中的淤泥时,费时费力的问题。
为实现上述目的,本发明提供如下技术方案:大臂机构,安装在清淤机器人的车身上,大臂机构包括连接方管和设置在连接方管两侧的大臂,所述连接方管的两端分别焊接在两所述大臂上,所述大臂的底面靠近方管的位置通过举升油缸活塞销轴转动连接有大臂举升油缸的活塞端,所述大臂举升油缸的缸体端位于大臂的下侧且通过举升油缸缸体销轴转动连接在车身上,所述大臂举升油缸用于驱动大臂位于车身上升降运动,所述大臂的靠近车身的一端通过大臂销轴转动连接在车身上,所述连接方管的中间位置通过调整油缸缸体销轴转动连接有耙吸头调整油缸,所述连接方管的顶面中间位置通过保护装置固定安装有大臂角度传感器,所述大臂角度传感器随着大臂同步运动,所述大臂角度传感器感知所产生的角度变化并输出电信号,传递以远程控制站。
优选的,所述大臂呈V型状,所述连接方管的两端分别焊接在大臂的V型状夹角位置。
优选的,所述大臂位于车身与连接方管之间的臂面宽度小于大臂位于螺旋驱动马达板座与连接方管之间的臂面宽度。
优选的,所述大臂远离车身的一端贯穿焊接有螺旋驱动马达板座。
优选的,所述大臂靠近车身的一端贯穿焊接有大臂轴套,所述大臂轴套的内部设有大臂铜套,所述大臂销轴贯穿大臂铜套且设置在车身上。
优选的,所述大臂靠近车身的一端壁上与大臂轴套上设有同心的黄油嘴安装螺纹孔。
优选的,所述大臂的底面靠近方管的位置设有举升油缸活塞端耳板,所述举升油缸活塞端耳板的侧壁上贯穿焊接有举升油缸活塞端轴套,所述举升油缸活塞销轴贯穿举升油缸活塞端轴套且通过举升油缸活塞销轴固定螺母设置在举升油缸活塞端耳板上。
优选的,所述连接方管的中间位置设有调整油缸活塞端耳板,所述调整油缸活塞端耳板的侧壁上贯穿焊接有调整油缸活塞端轴套,所述调整油缸活塞销轴贯穿调整油缸活塞端轴套且通过调整油缸缸体销轴固定螺母设置在调整油缸活塞端耳板上。
优选的,所述大臂采用钢板材料焊接而成并且其内部为空心结构。
优选的,所述保护装置包括座板,所述座板焊接在连接方管的顶面中间位置,所述卡槽通过传感器安装螺栓固定在座板上,所述大臂角度传感器和卡槽通过卡槽结构装配,所述保护罩采用保护罩安装螺栓固定在座板上,所述保护罩罩在大臂角度传感器上,所述大臂角度传感器和保护罩4194共用一个安装座板。
与现有技术相比,本发明的有益效果是:大臂机构,清淤机器人的大臂机构是连接在车身前侧壁上的重要设备,起到支撑和调整其耙吸螺旋机构的角度及高度的作用,从而使大臂总成同轴联动机构带动耙吸螺旋在不同的位置工作。
整套结构采用对称式布置,并且通过大臂举升油缸和耙吸头调整油缸驱动的配合设置,使其力矩更大,运行更加可靠。
大臂角度传感器随着大臂同步运动,大臂角度传感器感知所产生的角度变化并输出电信号,传递以远程控制站,进而调节大臂举升油缸的伸缩量,达到调整大臂抬升量的目的。
本发明针对现有设备缺陷,设计出大臂和大臂举升油缸对称式布置,有利于获得平衡力矩,使运行更加可靠。其可以根据管道、箱涵中的实际情况,调节耙吸螺旋的高低,在保证清淤的效果下,大大提高了工作效率,且无液压油泄漏的风险,具有良好的使用效果,市场前景广阔。
附图说明
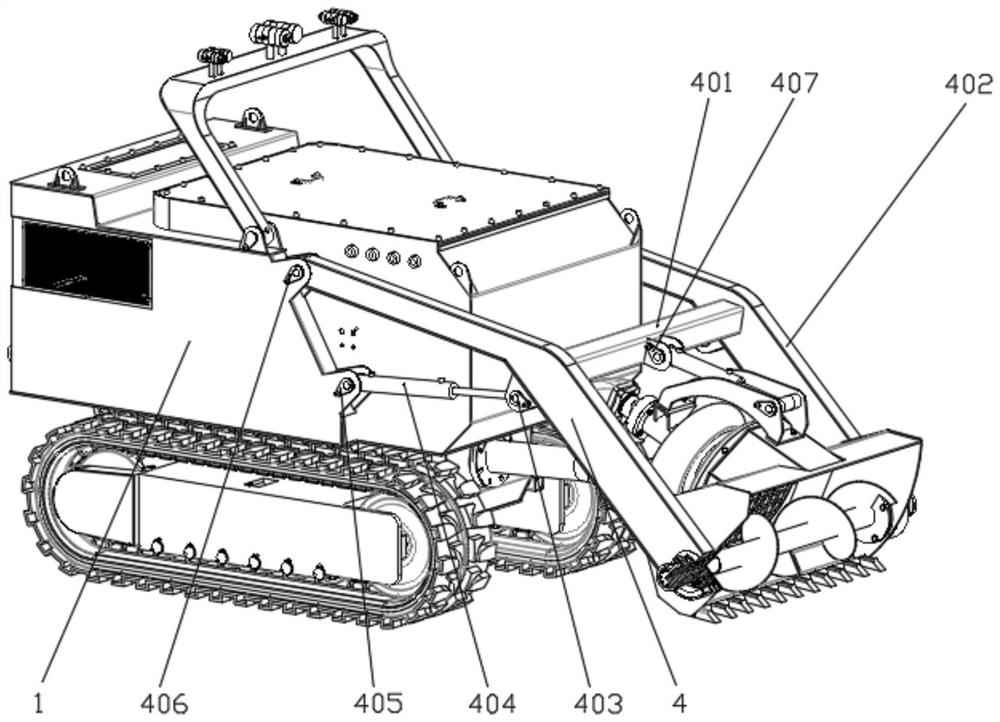
图1为本发明的清淤机器人整体结构示意图一;
图2为本发明大臂机构的结构示意图;
图3为图2中A处放大结构示意图;
图4为本发明的清淤机器人整体结构示意图二;
图5为图4中B处放大结构示意图;
图6为本发明的保护装置和大臂角度传感器爆炸结构示意图。
图中:1-车身、4-大臂机构、401-连接方管、402-大臂、403-举升油缸活塞销轴、404-大臂举升油缸、405-举升油缸缸体销轴、406-大臂销轴、407-调整油缸缸体销轴、408-螺旋驱动马达板座、409-大臂轴套、410-大臂铜套、411-黄油嘴安装螺纹孔、412-举升油缸活塞端耳板、413-举升油缸活塞端轴套、414-举升油缸活塞销轴固定螺母、415-调整油缸活塞端耳板、416-调整油缸活塞端轴套、417-调整油缸缸体销轴固定螺母,418-大臂角度传感器、419-保护装置、4191-座板、4192-卡槽、4193-传感器安装螺栓、4194-保护罩、4195-保护罩安装螺栓。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-6,本发明提供一种技术方案:图1和图2中,大臂机构,安装在清淤机器人的车身1上,起到支撑和调整其耙吸螺旋机构的角度及高度的作用,从而使大臂总成同轴联动机构带动耙吸螺旋在不同的位置工作,大臂机构4包括连接方管401和设置在连接方管401两侧的大臂402,连接方管401的两端分别焊接在两大臂402上,方管401对两侧的大臂402起到连接支撑作用,大臂402的底面靠近方管401的位置通过举升油缸活塞销轴403转动连接有大臂举升油缸404的活塞端,大臂举升油缸404的缸体端位于大臂402的下侧且通过举升油缸缸体销轴405转动连接在车身1上,大臂举升油缸404用于驱动大臂402位于车身1上升降运动,大臂举升油缸404通过液压作用推动活塞伸缩,同时大臂402在举升油缸缸体销轴405的约束下上下运动,大臂402靠近车身1的一端通过大臂销轴406转动连接在车身1上,所述连接方管401的中间位置通过调整油缸缸体销轴407转动连接有耙吸头调整油缸,耙吸头调整油缸通过液压作用推动活塞伸缩,同时耙吸单元总成在耙吸单元运转轴承的约束下上下翻转。连接方管401的顶面中间位置通过保护装置419固定安装有大臂角度传感器418,大臂角度传感器418随着大臂402同步运动,所述大臂角度传感器418感知所产生的角度变化并输出电信号,传递以远程控制站。
具体而言,大臂402呈V型状,连接方管401的两端分别焊接在大臂402的V型状夹角位置,两侧的大臂402要求有良好的平行度,同与连接方管401之间要有良好的垂直度。
具体而言,大臂402位于车身与连接方管402之间的臂面宽度小于大臂402位于螺旋驱动马达板座408与连接方管402之间的臂面宽度。
具体而言,大臂402远离车身的一端贯穿焊接有螺旋驱动马达板座408,耙吸螺旋驱动马达固定安装在螺旋驱动马达板座408上。
具体而言,图3中,大臂402靠近车身的一端贯穿焊接有大臂轴套409,大臂轴套409的内部设有大臂铜套410,大臂销轴406贯穿大臂铜套410且设置在车身1上,大臂铜套410和大臂轴套409均采用液压顶升压配,属于过盈配合,并且两侧大臂402上的大臂铜套410和螺旋驱动马达板座408要有良好的同轴度。
具体而言,大臂402靠近车身1的一端壁上与大臂轴套409上设有同心的黄油嘴安装螺纹孔411,黄油嘴安装螺纹孔411用于安装黄油嘴。
具体而言,大臂402的底面靠近方管402的位置设有举升油缸活塞端耳板412,举升油缸活塞端耳板412的侧壁上贯穿焊接有举升油缸活塞端轴套413,举升油缸活塞销轴405贯穿举升油缸活塞端轴套413且通过举升油缸活塞销轴固定螺母414设置在举升油缸活塞端耳板412上,为保证举升油缸活塞销轴405安装的可靠性,举升油缸活塞销轴405采用举升油缸活塞销轴固定螺母414固定于焊接在耳板上。
具体而言,连接方管401的中间位置设有调整油缸活塞端耳板415,调整油缸活塞端耳板415的侧壁上贯穿焊接有调整油缸活塞端轴套416,调整油缸活塞销轴407贯穿调整油缸活塞端轴套416且通过调整油缸缸体销轴固定螺母417设置在调整油缸活塞端耳板415上,为保证调整油缸活塞销轴407安装的可靠性,调整油缸活塞销轴407采用调整油缸缸体销轴固定螺母417固定于焊接在耳板上。
具体而言,大臂412采用钢板材料焊接而成并且其内部为空心结构。
具体而言,保护装置419包括座板4191,座板4191焊接在连接方管401的顶面中间位置,卡槽4192通过传感器安装螺栓4193固定在座板4191上,大臂角度传感器418和卡槽4192通过卡槽结构装配,保护罩4194采用保护罩安装螺栓4195固定在座板4191上,保护罩4194罩在大臂角度传感器418上,大臂角度传感器418和保护罩4194共用一个安装座板5013。
工作原理:本发明中清淤机器人的大臂机构4是连接在车身1前侧壁上的重要设备,起到支撑和调整其耙吸螺旋机构的角度及高度的作用,从而使大臂总成同轴联动机构带动耙吸螺旋在不同的位置工作。
整套结构采用对称式布置,并且通过大臂举升油缸404和耙吸头调整油缸驱动的配合设置,使其力矩更大,运行更加可靠。
大臂角度传感器418随着大臂402同步运动,大臂角度传感器418感知所产生的角度变化并输出电信号,传递以远程控制站,进而调节大臂举升油缸402的伸缩量,达到调整大臂402抬升量的目的。
本发明针对现有设备缺陷,设计出大臂402和大臂举升油缸404对称式布置,有利于获得平衡力矩,使运行更加可靠。其可以根据管道、箱涵中的实际情况,调节耙吸螺旋的高低,在保证清淤的效果下,大大提高了工作效率,且无液压油泄漏的风险,具有良好的使用效果,市场前景广阔。
在本发明的描述中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
本发明使用到的标准零件均可以从市场上购买,异形件根据说明书的和附图的记载均可以进行订制,各个零件的具体连接方式均采用现有技术中成熟的螺栓、铆钉、焊接等常规手段,机械、零件和设备均采用现有技术中,常规的型号,加上电路连接采用现有技术中常规的连接方式,在此不再详述。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种含4R-5R大臂摆动机构的双变胞多闭链连杆可控挖掘机构
- 一种大臂座上装有探测钻机的挖掘工作机构