顺岸式码头全封闭自动化作业方法
文献发布时间:2023-06-19 10:29:05
技术领域
本发明涉及码头自动化作业技术领域,尤其涉及一种顺岸式码头全封闭自动化作业方法。
背景技术
在智慧港口浪潮下,自动化作业作为代替传统人工方式,实现对集装箱运输作业的一种新型自动化作业方案,目前正在许多港口如火如荼的进行中。由于自动化作业作为智慧港口浪潮下诞生的新式作业方案,使用港口较少。而自动化作业流程方案需要依照码头平面布置的形式来进行设计,目前缺乏能够根据顺岸式码头船舶作业情况,并结合封闭区域内的岸桥、场地内轨道桥、自动锁站、无人集卡等设备统筹考虑并进行全封闭式自动化作业的港口。所以说利用好顺岸式码头平面布局,在全封闭场景下进行自动化作业,是助推智慧港口建设、加快港口自动化转型升级的当务之急。
发明内容
为了解决上述问题,本申请的目的在于提供一种顺岸式码头全封闭自动化作业方法。
为实现本发明的目的,本发明提供的一种顺岸式码头全封闭自动化作业方法,
在全封闭式作业区域内,将自动化岸桥、场地内轨道桥、无人集卡、无人地面锁站进行联调统一,实现所有设备的全自动化作业,
其中,自动化岸桥以及场地内轨道桥均通过远控方式实现了作业区域内无人化作业;无人集卡通过场地内地图规划以及线路优化实现了作业区域内的无人驾驶作业;无人地面锁站通过光纤与自动化系统相连接,通过接收船舶实时进入锁站的集装箱信息,实现对于集装箱底锁的拆、装作业。
其中,
所述全封闭式作业区域内包括:自动化岸桥、场地内轨道桥、无人地面锁站、无人集卡、01E堆场、02E堆场、外部集卡以及三个闸口:闸口1、闸口2、闸口3,其中闸口1用于维修使用,闸口2、闸口3用于外部集卡管控;
作业不同阶段下的作业方法如下:
(1)集港作业时,闸口2、闸口3开启,此时全封闭作业区域内自动化岸桥、场地内轨道桥、无人地面锁站、外部集卡进行作业;
(2)装卸船作业时,闸口2、闸口3封闭,此时全封闭作业区域内自动化岸桥、场地内轨道桥、无人地面锁站、无人集卡作业;
(3)提箱作业时,闸口2、闸口3开启,此时区域内自动化岸桥、场地内轨道桥、无人地面锁站、外部集卡进行作业;
(4)当无人集卡作业过程中出现故障需要应急处理时,闸口1开启,可将故障无人集卡车辆驶出现场,进行维修。
与现有技术相比,本发明的有益效果为,本申请提供了一套行之有效的全封闭式自动化作业流程,将自动化岸桥、场地内轨道桥、无人集卡、自动锁站实现统一运转,能够实现全封闭作业区域内的全自动化作业,并根据船舶集装箱作业时的不同作业阶段进行功能切换,实现在不同作业场景下的自动化作业需求。
附图说明
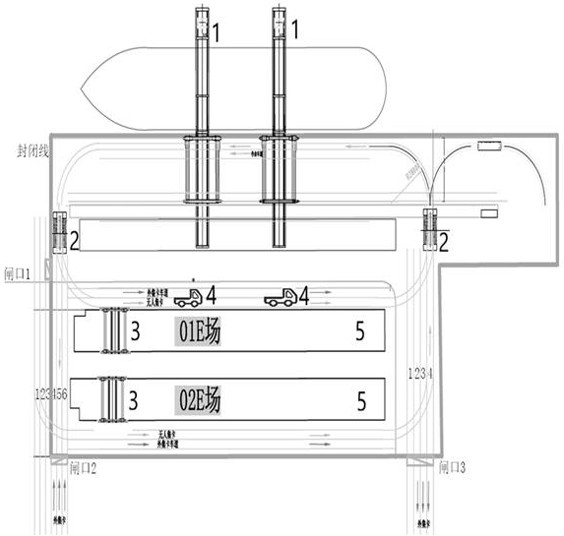
图1所示为本申请的结构示意图。
具体实施方式
需要说明的是,在不冲突的情况下,本申请中的实施例及实施例中的特征可以相互组合。
以下结合附图和具体实施例对本发明作进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
如图1所示,顺岸式码头全封闭式作业区域,包括自动化岸桥1、无人地面锁站2、场地内轨道桥3、无人集卡4、作业堆场5。
具体地:将作业区域通过围栏进行全部封闭处理,见图中的封闭线。作业资源:自动化岸桥1、无人地面锁站2、无人集卡、01E堆场、02E堆场、外部集卡。在图中所示位置设置三个闸口:其中闸口1用于维修使用,闸口2、闸口3用于外部集卡管控。
作业不同阶段下的流程方案:
(1)集港作业时,闸口2、闸口3开启,此时区域内自动化远控岸桥、场地内轨道桥、自动锁站、外部集卡进行作业。
(2)装卸船作业时,闸口2、闸口3封闭,此时区域内自动化远控岸桥、场地内轨道桥、自动锁站、无人集卡作业。
(3)提箱作业时,闸口2、闸口3开启,此时区域内自动化远控岸桥、场地内轨道桥、自动锁站、外部集卡进行作业。
(4)当无人集卡作业过程中出现故障需要应急处理时,闸口1开启,可将故障无人集卡车辆驶出现场,进行维修。
通过本专利,实现了全封闭式自动化作业流程,通过场地封闭、闸口管控的方式最大程度的避免了作业人员、外部车辆、内部车辆交叉作业所造成的安全隐患问题,助推智慧港口自动化升级,并为顺岸式码头自动化改造升级提供了流程化的作业理念以及方案。
需要说明的是,本申请中未详述的技术方案,采用公知技术。
以上所述仅是本发明的优选实施方式,应当指出的是,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
- 顺岸式码头全封闭自动化作业方法
- 一种顺岸式边装卸自动化码头ART动态调度方法