一种二自由度压电驱动深海推进系统及其工作方法
文献发布时间:2023-06-19 10:30:40
技术领域
本发明涉及超声电机领域,尤其涉及一种二自由度压电驱动深海推进系统及其工作方法。
背景技术
在过去的几十年里,一系列的战略和技术被用来研究海洋,其中无人潜航器作为现代海洋装备的“新角色”,必将帮助我国水下科研、作战体系取得跨越式发展,加快“海洋强国”的建设。现有的深海推进机构都需要考虑封密性和结构强度,传动机构复杂,不容易微型化。和传统推进器相比较,压电驱动的深海推进装置优势为:1.结构简单便于小型化;2.全开放式结构(无需考虑封密和强度问题);3.环境适应性强,电磁兼容性好;4.机动性强;5.体型小和划桨推进使其反侦察能力更强。
发明内容
本发明所要解决的技术问题是针对背景技术中所涉及到的缺陷,提供一种二自由度压电驱动深海推进系统及其工作方法。
本发明为解决上述技术问题采用以下技术方案:
一种二自由度压电驱动深海推进系统,包括桨叶、二自由度转子、超声电机和预紧模块;
所述桨叶包含桨叶本体、第一连接杆和第二连接杆,其中,所述第一连接杆的一端和所述桨叶根部同轴固连,所述第二连接杆的一端和所述桨叶根部固连且第二连接杆和所述第一连接杆相互垂直;
所述二自由度转子包含第一半圆环轨道、第二半圆环轨道、第一曲面连接轨道和第二曲面连接轨道,其中,所述第一半圆环轨道、第二半圆环轨道均呈半圆环状,其轴线垂直相交;第一半圆环轨道的两端分别通过第一曲面连接轨道、第二曲面连接轨道和所述第二半圆环轨道的两端对应平滑固连,形成接触轨道;所述接触轨道内壁的中部设有朝内的环形凸起;
所述桨叶的第一连接杆和所述第一半圆环轨道同轴、第二连接杆和所述第二半圆环轨道的同轴,且桨叶第一连接杆、第二连接杆的另一端均和所述接触轨道的环形凸起固连;
所述超声电机包括金属基体、第一至第四压电陶瓷片、以及第一至第四作动足,其中,所述金属基体为正方形薄板;所述第一至第四压电陶瓷片设置在所述金属基体的下端面;所述第一至第四作动足设置在所述金属基体的上端面;
所述金属基体的下端面还设有结构相同的第一至第三锥形槽,所述第一至第三锥形槽均位于节点处,其中,第一、第二锥形槽分别位于金属基体的两个底角,第三锥形槽位于金属基体中和第一、第二锥形槽连线平行的边的中点处;
所述预紧模块包含第一限位件、第二限位件、支板、底板、以及第一至第三调节单元;
所述第一限位件、第二限位件结构相同,均包含固定座、曲轴、渐变部、轴颈、轴承和接触部,其中,所述渐变部呈圆台状;所述曲轴呈L形,一端和所述固定座垂直固连,另一端和所述渐变部面积较大的一端同轴固连;所述轴颈的一端和所述渐变部的另一端同轴固连;所述轴承设置在轴颈上,其内圈和轴颈同轴固连;所述接触部呈半球状,其端面和所述轴颈的另一端同轴固连;
所述第一至第三调节单元结构相同,均包含顶锥和弹簧,其中,所述顶锥包含锥头、锥体和锥尾;所述椎体呈圆柱状,其上设有外螺纹;所述锥头呈圆柱状,一端设有和所述第一锥形槽相匹配的圆锥,另一端和所述椎体的一端同轴固连;所述锥尾为光杆,其一端和所述椎体的另一端同轴固连;
所述支板上设有第一至第三螺纹通孔,所述第一至第三螺纹通孔和所述第一至第三锥形槽一一对应;
所述底板上设有第一至第三配合通孔,所述第一至第三配合和所述第一至第三锥形槽一一对应;
所述第一至第三调节单元中顶锥的椎体分别和所述第一至第三螺纹通孔一一对应螺纹相连,且第一至第三调节单元中顶锥的锥头分别一一对应顶在金属基体的第一至第三锥形槽中,第一至第三调节单元中顶锥的锥尾一一对应穿过底板的第一至第三配合通孔、和其间隙配合;
所述第一至第三调节单元中的弹簧分别套在其顶锥椎体外,一端和所述支板相抵、另一端和所述底板相抵;
所述第一限位件、第二限位件分别设在所述支板两侧,其固定座均和所述底板固连;
所述第一至第四作动足均和接触轨道的外壁相抵;
所述第一限位件、第二限位件的轴颈同轴,第一限位件、第二限位件的接触部分别和接触轨道环形凸起的两侧相抵,第一限位件、第二限位件的轴承的外圈均和接触轨道的内壁相抵;第一限位件、第二限位件和所述第一至第四作动足相配合将接触轨道夹在中间;
所述金属基体垂直于第二限位件轴颈轴线方向的二阶弯振的波峰、波谷所在直线分别为直线A、直线B,金属基体平行于第二限位件轴颈轴线方向的二阶弯振的波峰、波谷所在直线分别为直线C、直线D;
所述第一至第四作动足均为长方体,第一作动足、第四作动足下端面的中心位于直线A上,第二作动足、第三作动足下端面的中心位于直线B上;第一作动足、第四作动足均位于直线C、直线D之间,且第一作动足下端面的一条边位于直线C上、第四作动足下端面的一条边位于直线D上;第二作动足、第三作动足分别位于直线C、直线D两侧,且第二作动足下端面的一条边位于直线C上、第三作动足下端面的一条边位于直线D上;
所述第一至第四压电陶瓷片均为矩形片状,第一至第四压电陶瓷片沿长度方向的中轴线分别和直线C、直线B、直线D、直线A一一对应重合,且第一至第四压电陶瓷片的一条短边分别和金属基体的四条边一一对应重合;
所述第一至第四压电陶瓷片均沿厚度方向极化,其中,第一、第四压电陶瓷片极化方向相同,第二、第三压电陶瓷片极化方向均和第一压电陶瓷片的极化方向相反。
作为本发明一种二自由度压电驱动深海推进系统进一步的优化方案,所述顶锥锥尾远离椎体的一端设有开槽,以便于转动顶锥。
作为本发明一种二自由度压电驱动深海推进系统进一步的优化方案,所述顶锥锥头的圆椎为45°圆锥体。
本发明还公开了一种该二自由度压电驱动深海推进系统的工作方法,包含以下步骤:
对第一、第三压电陶瓷片施加第一简谐电压信号,对第二、第四压电陶瓷片施加第二简谐电压信号,调整第一、第二简谐电压信号使其在时间上具有π/2的相位差,使得第一至第四作动足产生椭圆运动,由于第一至第四作动足在接触轨道上相对于模态振型的位置不同,则其产生的椭圆运动之间都具有相位差,交替推动接触轨道转动,进而使得桨叶转动;
如果需要桨叶反向转动,调整第一、第二简谐电压信号使其在时间上的相位差为-π/2即可。
本发明采用以上技术方案与现有技术相比,具有以下技术效果:
本发明一种压电驱动二自由度转子深海推进系统及其工作方式,省去了复杂的传动机构,具有体积小、重量轻、功率密度大、响应快、低噪声、环境适应能力强、生产成本低以及易于微型化等优点。
附图说明
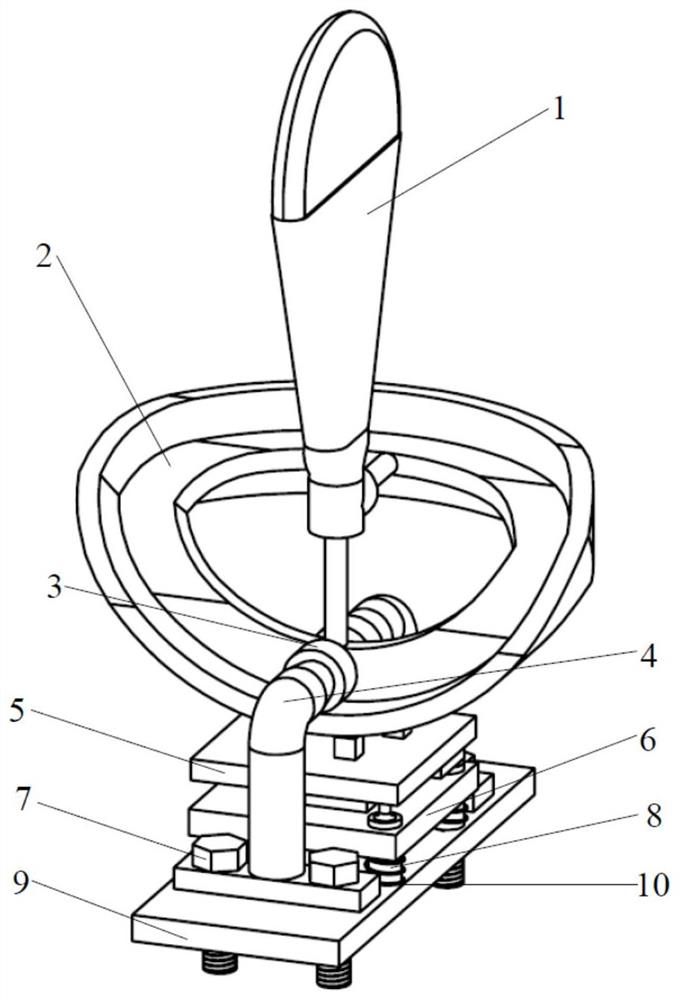
图1是本发明的结构示意图;
图2是本发明的桨叶结构示意图;
图3是本发明的二自由度转子结构示意图;
图4是本发明中超声电机的结构示意图;
图5(a)、图5(b)分别是本发明中第一至第四作动足、第一至第四压电陶瓷片在金属基体上分布的结构示意图;
图6是本发明中限位件的结构示意图;
图7是本发明中顶锥的结构示意图;
图8是本发明中支板的结构示意图;
图9是本发明中底板的结构示意图;
图10是超声电机的第一二阶弯振工作原理示意图;
图11是超声电机的第二二阶弯振工作原理示意图;
图12是本发明工作时的状态变化示意图。
图中1-桨,2-二自由度转子,3-轴承,4-第一限位件,5-超声电机,6-支板,7-螺栓,8-顶锥,9-底板,10-弹簧,1.1-桨叶,1.2-第二连接杆,1.3-第一连接杆,2.1-接触轨道,2.2-挡板,2.3-第一半圆环轨道,2.4-第一曲面连接轨道,2.5-第二半圆环轨道,2.6-第二曲面连接轨道,4.1-轴颈,4.2-接触部,4.3-底座,5.1-金属基体,5.2-第一压电陶瓷片,6.1-支板上的螺纹孔,8.1-锥头,8.2-锥体,8.3-锥尾,9.1-底板上和顶锥配合的通孔,9.2-底板上用于固定第一限位件的通孔。
具体实施方式
下面结合附图对本发明的技术方案做进一步的详细说明:
本发明可以以许多不同的形式实现,而不应当认为限于这里所述的实施例。相反,提供这些实施例以便使本公开透彻且完整,并且将向本领域技术人员充分表达本发明的范围。在附图中,为了清楚起见放大了组件。
如图1所示,本发明公开了一种二自由度压电驱动深海推进系统,包括桨叶、二自由度转子、超声电机和预紧模块;
如图2所示,所述桨叶包含桨叶本体、第一连接杆和第二连接杆,其中,所述第一连接杆的一端和所述桨叶根部同轴固连,所述第二连接杆的一端和所述桨叶根部固连且第二连接杆和所述第一连接杆相互垂直;
如图3所示,所述二自由度转子包含第一半圆环轨道、第二半圆环轨道、第一曲面连接轨道和第二曲面连接轨道,其中,所述第一半圆环轨道、第二半圆环轨道均呈半圆环状,其轴线垂直相交;第一半圆环轨道的两端分别通过第一曲面连接轨道、第二曲面连接轨道和所述第二半圆环轨道的两端对应平滑固连,形成接触轨道;所述接触轨道内壁的中部设有朝内的环形凸起;
所述桨叶的第一连接杆和所述第一半圆环轨道同轴、第二连接杆和所述第二半圆环轨道的同轴,且桨叶第一连接杆、第二连接杆的另一端均和所述接触轨道的环形凸起固连;
如图4所示,所述超声电机包括金属基体、第一至第四压电陶瓷片、以及第一至第四作动足,其中,所述金属基体为正方形薄板;所述第一至第四压电陶瓷片设置在所述金属基体的下端面;所述第一至第四作动足设置在所述金属基体的上端面;
如图5(b)所示,所述金属基体的下端面还设有结构相同的第一至第三锥形槽,所述第一至第三锥形槽均位于节点处,其中,第一、第二锥形槽分别位于金属基体的两个底角,第三锥形槽位于金属基体中和第一、第二锥形槽连线平行的边的中点处;
所述金属基体的下端面还设有结构相同的第一至第三锥形槽,所述第一至第三锥形槽均位于节点处,其中,第一、第二锥形槽分别位于金属基体的两个底角,第三锥形槽位于金属基体中和第一、第二锥形槽连线平行的边的中点处;
所述预紧模块包含第一限位件、第二限位件、支板、底板、以及第一至第三调节单元;
如图6所示,所述第一限位件、第二限位件结构相同,均包含固定座、曲轴、渐变部、轴颈、轴承和接触部,其中,所述渐变部呈圆台状;所述曲轴呈L形,一端和所述固定座垂直固连,另一端和所述渐变部面积较大的一端同轴固连;所述轴颈的一端和所述渐变部的另一端同轴固连;所述轴承设置在轴颈上,其内圈和轴颈同轴固连;所述接触部呈半球状,其端面和所述轴颈的另一端同轴固连;
如图7所示,所述第一至第三调节单元结构相同,均包含顶锥和弹簧,其中,所述顶锥包含锥头、锥体和锥尾;所述椎体呈圆柱状,其上设有外螺纹;所述锥头呈圆柱状,一端设有和所述第一锥形槽相匹配的圆锥,另一端和所述椎体的一端同轴固连;所述锥尾为光杆,其一端和所述椎体的另一端同轴固连;
如图8所示,所述支板上设有第一至第三螺纹通孔,所述第一至第三螺纹通孔和所述第一至第三锥形槽一一对应;
如图9所示,所述底板上设有第一至第三配合通孔,所述第一至第三配合和所述第一至第三锥形槽一一对应;
所述第一至第三调节单元中顶锥的椎体分别和所述第一至第三螺纹通孔一一对应螺纹相连,且第一至第三调节单元中顶锥的锥头分别一一对应顶在金属基体的第一至第三锥形槽中,第一至第三调节单元中顶锥的锥尾一一对应穿过底板的第一至第三配合通孔、和其间隙配合;
所述第一至第三调节单元中的弹簧分别套在其顶锥椎体外,一端和所述支板相抵、另一端和所述底板相抵;
所述第一限位件、第二限位件分别设在所述支板两侧,其固定座均和所述底板固连;
所述第一至第四作动足均和接触轨道的外壁相抵;
所述第一限位件、第二限位件的轴颈同轴,第一限位件、第二限位件的接触部分别和接触轨道环形凸起的两侧相抵,第一限位件、第二限位件的轴承的外圈均和接触轨道的内壁相抵;第一限位件、第二限位件和所述第一至第四作动足相配合将接触轨道夹在中间。
如图5(a)、图5(b)所示,所述金属基体垂直于第二限位件轴颈轴线方向的二阶弯振的波峰、波谷所在直线分别为直线A、直线B,金属基体平行于第二限位件轴颈轴线方向的二阶弯振的波峰、波谷所在直线分别为直线C、直线D;
如图5(a)所示,所述第一至第四作动足均为长方体,第一作动足、第四作动足下端面的中心位于直线A上,第二作动足、第三作动足下端面的中心位于直线B上;第一作动足、第四作动足均位于直线C、直线D之间,且第一作动足下端面的一条边位于直线C上、第四作动足下端面的一条边位于直线D上;第二作动足、第三作动足分别位于直线C、直线D两侧,且第二作动足下端面的一条边位于直线C上、第三作动足下端面的一条边位于直线D上;
如图5(b)所示,所述第一至第四压电陶瓷片均为矩形片状,第一至第四压电陶瓷片沿长度方向的中轴线分别和直线C、直线B、直线D、直线A一一对应重合,且第一至第四压电陶瓷片的一条短边分别和金属基体的四条边一一对应重合;
所述第一至第四压电陶瓷片均沿厚度方向极化,其中,第一、第四压电陶瓷片极化方向相同,第二、第三压电陶瓷片极化方向均和第一压电陶瓷片的极化方向相反。
所述顶锥锥尾远离椎体的一端还能够进一步设有开槽,以便于转动顶锥;所述顶锥锥头的圆椎为45°圆锥体。
本发明还公开了一种该二自由度压电驱动深海推进系统的工作方法,包含以下步骤:
如图11所示,对第一、第三压电陶瓷片施加第一简谐电压信号,超声电机被激发出第二二阶弯振模态;如图10所示,对第二、第四压电陶瓷片施加第二简谐电压信号,超声电机被激发出第一二阶弯振模态;调整第一、第二简谐电压信号使其在时间上具有π/2的相位差,使得第一至第四作动足产生椭圆运动,由于第一至第四作动足在接触轨道上相对于模态振型的位置不同,则其产生的椭圆运动之间都具有相位差,交替推动接触轨道转动,进而使得桨叶转动;
如果需要桨叶反向转动,调整第一、第二简谐电压信号使其在时间上的相位差为-π/2即可。
如图1所示,所述底板和第一、第二限位件上轴承的距离为固定距离,转动第一至第三调节单元中顶锥,就能够通过调整支板和金属基体之间的距离进而调整支板和底板之间的距离,那么就能够改变第一至第三调节单元中弹簧的形变量,进而调整3个顶锥给超声电机的预压力。
如图11所示,给超声电机通电后,转子在整个周期的运动中被分成四个阶段:阶段一,转子从姿态1沿着接触轨道的半圆环一逆时针方向旋转到姿态2位置,桨叶在这个过程中进行有效推进;阶段二,转子从姿态2沿着第一曲面连接轨道运动到姿态3位置,在这个过程中桨作无用功,并没有起到推进作用;阶段三,转子从姿态3沿着半圆环二逆时针旋转到姿态4位置,这个过程中桨叶具有一定的推进作用;阶段四,转子从姿态4沿着第一曲面连接轨道运动到姿态1位置,在这个过程中桨作无用功,并没有起到推进作用;阶段四之后又开始了下一个重复循环的周期。
本技术领域技术人员可以理解的是,除非另外定义,这里使用的所有术语(包括技术术语和科学术语)具有与本发明所属领域中的普通技术人员的一般理解相同的意义。还应该理解的是,诸如通用字典中定义的那些术语应该被理解为具有与现有技术的上下文中的意义一致的意义,并且除非像这里一样定义,不会用理想化或过于正式的含义来解释。
以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式而已,并不用于限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种二自由度压电驱动深海推进系统及其工作方法
- 一种压电驱动深海推进装置及其工作方法