车辆停车辅助装置
文献发布时间:2023-06-19 10:36:57
技术领域
本发明涉及一种车辆停车辅助装置。
背景技术
已知有一种车辆停车辅助装置,其使车辆自动地停车到未设置划分停车区划的白线等划分线的停车场(例如,私人住宅的停车场)。该车辆停车辅助装置被配置为,在车辆到停车场停车时,对与该停车场相关的信息(以下,称为“停车场信息”)进行注册,在下次要将车辆自动地停车到该停车场时,对那时取得的停车场信息与已注册的停车场信息进行对照,掌控车辆与停车场的位置关系,与此同时自动地将车辆停车到停车场。作为这样的车辆停车辅助装置,已知一种将通过摄像机拍摄停车场内的立体物体或停车场周边的立体物体而取得的图像(以下称为“拍摄图像”)中拍摄到的立体物体的特征点作为停车场信息进行注册的车辆停车辅助装置(例如,参照日本特开2017-138664号公报)。
发明内容
在进行立体物体的特征点的注册(以下,简称为“特征点注册”)时仅驾驶者搭乘于车辆,但在进行车辆向停车场的自动停车(以下,简称为“自动停车”)时除了驾驶者之外还有其他乘员搭乘于车辆的情况下,在特征点注册时和自动停车时车辆的倾斜情况可能不同。此外,在特征点注册时车辆行驶过的地面与自动停车时车辆行驶的地面不同,其结果为,在车辆行驶的地面的坡度不同的情况下,特征点注册时和自动停车时车辆的倾斜情况也有可能不同。在该情况下,即使相同的立体物体被拍摄到拍摄图像中,在拍摄图像中拍摄到的立体物体的形状在特征点注册时和自动停车时也有可能不同。在该情况下,即使在自动停车时取得注册了特征点的立体物体(以下称为“注册立体物体”)的特征点,也有可能不能够判断为这些取得的特征点是注册立体物体的特征点,其结果为,有可能不能够使车辆自动地停车到停车场。
另外,在上午进行了特征点注册但在下午进行了自动停车的情况下,在特征点注册时和自动停车时,太阳光对立体物体的照射方式以及从地面反射的太阳光对立体物体的照射方式也不同。此外,在特征点注册是在白天进行的但在夜间进行自动停车的情况下,在特征点注册时和自动停车时光对立体物体的照射方式以及从地面反射的光对立体物体的照射方式也不同。在这样的情况下,即使相同的立体物体被拍摄到拍摄图像中,在拍摄图像中呈现的立体物体的特征点也有可能在特征点注册时和自动停车时不同。该情况下,即使在自动停车时取得注册立体物体的特征点,也不能够判断为这些取得的特征点是注册立体物体的特征点,其结果为,有可能不能够使车辆自动地停车到停车场。
并且,在其他车辆、自行车以及花盆等可移动的立体物体的特征点被注册为停车场信息,这样的可移动的立体物体在自动停车时已从特征点注册时的处所位置移开的情况下,在自动停车时未取得注册了特征点的立体物体的特征点,其结果为,不能够使车辆自动地停车到停车场。
在以此方式将立体物体的特征点作为停车场信息进行注册的情况下,当特征点注册时和自动停车时围绕车辆、停车场的状况不同时,有可能不能够使车辆自动地停车到停车场。
本发明是为了应对所述问题而完成的。即,本发明的目的之一在于,提供一种在特征点注册时和自动停车时围绕车辆、停车场的状况不同的情况下也能够使车辆自动地停车到停车场的车辆停车辅助装置。
本发明的车辆停车辅助装置,具有:摄像机,其以能够拍摄车辆的周围的方式安装在所述车辆;控制单元,其能够执行停车辅助控制,所述停车辅助控制为利用与停车场相关的信息将所述车辆自动地停车到所述停车场,所述与停车场相关的信息是从由所述摄像机拍摄的图像中作为停车场信息而取得的。
所述控制单元配置为,取得在所述车辆停止在所述停车场的旁边时由所述摄像机拍摄的所述停车场的图像作为拍摄图像,从所述拍摄图像中取得所述停车场的入口的地面的特征点作为入口特征点,利用从本次取得的所述拍摄图像中取得的所述停车场信息执行所述停车辅助控制,对所述停车场信息进行注册,所述停车场信息包括与取得的所述入口特征点相关的信息作为入口特征点信息。
进一步地,所述控制单元被配置为,在注册了所述停车场信息之后所述车辆停止在未判断的停车场的旁边的情况下,取得所述拍摄图像,从本次取得的所述拍摄图像中取得所述未判断的停车场的入口的地面的特征点作为未对照的特征点,通过将与所述未对照的特征点相关的信息和所述入口特征点信息进行对照,判断所述未判断的停车场是否为注册了所述停车场信息的所述停车场即已注册的停车场,在判断为所述未判断的停车场是所述已注册的停车场的情况下,利用本次得到的所述停车场信息和注册了的所述停车场信息执行所述停车辅助控制。
由此,不是针对停车场内的立体物体、停车场周边的立体物体的特征点,而是将与停车场内的地面及停车场周边的地面的特征点相关的信息作为停车场信息进行注册。即使在特征点注册时和自动停车时围绕车辆、停车场的状况不同,由摄像机拍摄的停车场内的地面、停车场周边的地面的图像的变化也小。因此,即使在特征点注册时和自动停车时围绕车辆、停车场的状况不同,在自动停车时取得了与作为停车场信息而注册了的入口特征点(以下,称为“注册入口特征点”)对应的特征点的情况下,也能够判断为该特征点是注册入口特征点,其结果为,能够判断为未判断的停车场是已注册的停车场。因此,能够使车辆自动地停车到停车场。
在本发明的车辆停车辅助装置中,所述控制单元也可以被配置为,将所述拍摄图像分割为多个规定分割范围,从所述规定分割范围分别取得至少一个所述特征点。在该情况下,所述入口特征点是从所述规定分割范围分别取得的特征点。
由此,能够不偏向停车场的入口的一部分的范围的地面而取得入口特征点。因此,能够更可靠地判断未判断的停车场是已注册的停车场。
另外,在本发明的车辆停车辅助装置中,所述规定分割范围例如为相同大小。
此外,在本发明的车辆停车辅助装置中,所述规定分割范围例如被设定为相互不交叠。
另外,在本发明的车辆停车辅助装置中,所述控制单元也可以被配置为,与距所述停车场的入口的中央远的所述规定分割范围相比,从距所述停车场的入口的中央近的所述规定分割范围取得比较多的数量的所述特征点,作为所述入口特征点。
由此,能够大量取得距停车场的入口的中央近的地面的入口特征点。因此,能够更可靠地判断未判断的停车场是已注册的停车场。
另外,在本发明的车辆停车辅助装置中,所述控制单元也可以被配置为,从各所述规定分割范围分别取得规定数量的所述入口特征点,在存在不能够取得所述规定数量的所述入口特征点的所述规定分割范围的情况下,从不能够取得所述规定数量的所述入口特征点的所述规定分割范围以外的所述规定分割范围,取得比所述规定数量多的数量的所述入口特征点。
由此,即使在一部分的范围中未取得规定数量的入口特征点的情况下,也能取得与在所有的范围中取得规定数量的入口特征点时的入口特征点的总数相同或接近的数量的入口特征点。因此,能够更可靠地判断未判断的停车场是已注册的停车场。
另外,在本发明的车辆停车辅助装置中,所述入口特征点信息例如包括与所述入口特征点的图像的浓淡的图案相关的信息。
由此,入口特征点的图像中的浓淡的图案被注册为停车场信息。
另外,在本发明的车辆停车辅助装置中,所述入口特征点信息例如包括与以所述停车场内的规定位置作为基准的所述入口特征点的位置相关的信息。
由此,将以停车场内的规定位置作为基准的入口特征点的位置注册为停车场信息。
另外,在本发明的车辆停车辅助装置中,所述控制单元也可以被配置为,在判断为所述未判断的停车场不是所述已注册的停车场的情况下,利用本次得到的所述停车场信息执行所述停车辅助控制。
另外,在本发明的车辆停车辅助装置中,所述摄像机例如包括对所述车辆的前方进行拍摄的前方摄像机、对所述车辆的后方进行拍摄的后方摄像机、对所述车辆的左侧进行拍摄的左侧摄像机以及对所述车辆的右侧进行拍摄的右侧摄像机。
参照以下附图,对实施方式进行说明,本发明的各结构要素并不限定于所述的实施方式。本发明的其他的目的、其他特征以及附带的优点,根据参照以下的附图而记述的关于本发明的实施方式的说明,能够容易地被理解。
附图说明
图1是表示本发明的实施方式的车辆停车辅助装置以及应用该车辆停车辅助装置的车辆的图。
图2是表示声纳传感器装置的配置以及检测范围的图。
图3是示出摄像机传感器装置的配置和摄像范围的图。
图4是表示停车场的一例的图。
图5是表示前方范围及后方范围的图。
图6是表示左侧范围及右侧范围的图。
图7是示出特征点的图。
图8是表示停车区划的图。
图9的(A)至(D)是示出显示器的图。
图10的(A)至(C)是示出显示器的图。
图11是用于说明图1所示的车辆停车辅助装置的动作的图。
图12是用于说明图1所示的车辆停车辅助装置的动作的图。
图13是用于说明图1所示的车辆停车辅助装置的动作的图。
图14是表示入口特征点的图。
图15是用于说明图1所示的车辆停车辅助装置的动作的图。
图16是用于说明图1所示的车辆停车辅助装置的动作的图。
图17是用于说明图1所示的车辆停车辅助装置的动作的图。
图18是用于说明图1所示的车辆停车辅助装置的动作的图。
图19的(A)至(C)是示出显示器的图。
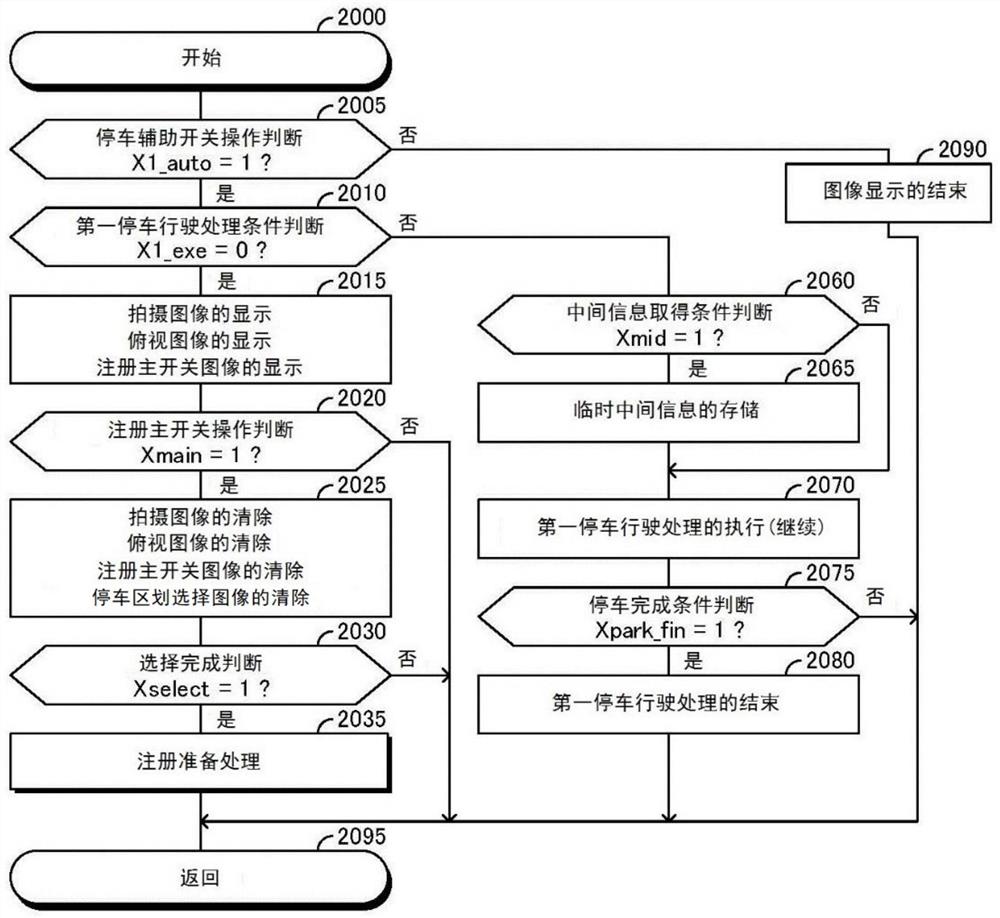
图20是示出图1所示的ECU的CPU执行的例程的流程图。
图21是示出图1所示的ECU的CPU执行的例程的流程图。
图22是示出图1所示的ECU的CPU执行的例程的流程图。
图23是示出图1所示的ECU的CPU执行的例程的流程图。
具体实施方式
以下,参照附图,对本发明的实施方式涉及的车辆停车辅助装置进行说明。图1示出了本发明的实施方式涉及的车辆停车辅助装置10以及应用了该车辆停车辅助装置10的车辆100。
如图1所示,车辆停车辅助装置10具有ECU 90。ECU是电子控制单元的简称。ECU 90具有微型计算机作为主要部分。微型计算机包括CPU、ROM、RAM、非易失性存储器以及接口等。CPU通过执行存储在ROM中的指令、程序或例程来实现各种功能。
在车辆100安装有车辆驱动力产生装置11、制动装置12和转向装置13。车辆驱动力产生装置11是用于产生用于使车辆100行驶的驱动力,并将该驱动力施加给车辆100的驱动轮的装置。车辆驱动力产生装置11例如是内燃机、电动机等。制动装置12是用于向车辆100的车轮施加用于制动车辆100的制动力的装置。转向装置13是用于将用于使车辆100转向的转向转矩施加于车辆100的转向轮的装置。
车辆驱动力产生装置11、制动装置12以及转向装置13与ECU 90电连接。ECU 90通过控制车辆驱动力产生装置11的动作,控制施加给车辆100的驱动轮的驱动力。此外,ECU90通过控制制动装置12的动作,控制施加给车辆100的车轮的制动力。另外,ECU 90通过控制转向装置13的动作,控制施加给车辆100的转向轮的转向转矩。
<传感器等>
车辆停车辅助装置10包括加速踏板操作量传感器21、制动踏板操作量传感器22、转向角传感器23、转向转矩传感器24、车速传感器25、横摆率传感器26、前后方向加速度传感器27、横向加速度传感器28、声纳传感器装置30、摄像机传感器装置40以及显示器50。
加速踏板操作量传感器21与ECU 90电连接。ECU 90经由加速踏板操作量传感器21检测并取得加速踏板14的操作量AP,作为加速踏板操作量AP。ECU 90控制车辆驱动力产生装置11的动作,以使与取得的加速踏板操作量AP对应的驱动力从车辆驱动力产生装置11施加到车辆100的驱动轮。
制动踏板操作量传感器22与ECU 90电连接。ECU 90经由制动踏板操作量传感器22检测并取得驾驶者对制动踏板15的操作量BP,作为制动踏板操作量BP。ECU 90根据取得的制动踏板操作量BP来控制制动装置12的动作,以使制动力从制动装置12施加给车辆100的车轮。
转向角传感器23与ECU 90电连接。ECU 90经由转向角传感器23检测并取得方向盘16相对于中立位置的旋转角度θst,作为转向角θst。
转向转矩传感器24与ECU 90电连接。ECU 90经由转向转矩传感器24检测并取得从驾驶者输入到转向轴17的转矩TQst,作为转向转矩TQst。
ECU 90控制转向装置13的动作,以使与取得的转向角θst及转向转矩TQst对应的转向转矩施加给车辆100的转向轮。
车速传感器25与ECU 90电连接。ECU 90经由车速传感器25检测并取得车辆100的各车轮的转速Vrot,作为各车轮的转速Vrot。ECU 90基于取得的各车轮的转速Vrot取得车辆100的行驶速度SPD作为车速SPD。
横摆率传感器26与ECU 90电连接。ECU 90经由横摆率传感器26检测并取得车辆100的横摆率YR,作为车辆横摆率YR。
前后方向加速度传感器27与ECU 90电连接。ECU 90经由前后方向加速度传感器27检测并取得车辆100的前后方向加速度Gx,作为车辆前后方向加速度Gx。
横向加速度传感器28与ECU 90电连接。ECU 90经由横向加速度传感器28检测并取得车辆100的横向加速度Gy,作为车辆横向加速度Gy。
声纳传感器装置30具有第一间隙声纳301至第十二间隙声纳312。
如图2所示,第一间隙声纳301以从车辆100的前方左端部向左前方发射声波的方式安装于车辆100。第二间隙声纳302以从车辆100的左侧前端向前方发射声波的方式安装于车辆100。第三间隙声纳303以从车辆100的前方右端部向右前方发射声波的方式安装于车辆100。第四间隙声纳304以从车辆100的右侧前端向前方发射声波的方式安装于车辆100。
另外,第五间隙声纳305以从车辆100的后方左端部向左后方发射声波的方式安装于车辆100。第六间隙声纳306以从车辆100的左侧后端向后方发射声波的方式安装于车辆100。第七间隙声纳307以从车辆100的后方右端部向右后方发射声波的方式安装于车辆100。第八间隙声纳308以从车辆100的右侧后端向后方发射声波的方式安装于车辆100。
另外,第九间隙声纳309以从车辆100的前方左侧部向左方发射声波的方式安装于车辆100。第十间隙声纳310以从车辆100的后方左侧部向左方发射声波的方式安装于车辆100。第十一间隙声纳311以从车辆100的前方右侧部向右方发射声波的方式安装于车辆100。第十二间隙声纳312以从车辆100的后方右侧部向右方发射声波的方式安装于车辆100。
第一间隙声纳301至第十二间隙声纳312接收由物体反射的声波。
声纳传感器装置30与ECU 90电连接。声纳传感器装置30将与“第一间隙声纳301至第十二间隙声纳312发出的声波”以及“第一间隙声纳301至第十二间隙声纳312接收的声波”等相关的信息发送至ECU 90。ECU 90基于从声纳传感器装置30接收的信息(以下称为“声纳信息SON”),取得与存在于车辆100周围的物体相关的信息作为物体信息OBJ。
在图2中,以符号Dx表示的方向是车辆100的前后方向,以下,将该方向称为“车辆前后方向Dx”,以符号Dy表示的方向是车辆100的宽度方向,以下,将该方向称为“车辆宽度方向Dy”。
摄像机传感器装置40具有前方摄像机41、后方摄像机42、左侧摄像机43以及右侧摄像机44。以下,根据需要,将前方摄像机41、后方摄像机42、左侧摄像机43以及右侧摄像机44统称为“摄像机45”。
如图3所示,前方摄像机41安装在车辆100的前端部的中央,以拍摄车辆100的前方的景物,其视场角41A约为180°。后方摄像机42安装在车辆100的后端部的中央,以拍摄车辆100的后方的景物,其视场角42A也约为180°。左侧摄像机43安装在车辆100的左侧部,以拍摄车辆100的左侧的景物,其视场角43A也约为180°。右侧摄像机44安装在车辆100的右侧部,以拍摄车辆100的右侧的景物,其视场角44A也大致为180°。
摄像机传感器装置40与ECU 90电连接。ECU 90能够经由摄像机传感器装置40取得与由各摄像机45拍摄的景物的图像相关的信息。
以下,根据需要,将与由前方摄像机41拍摄到的景物的图像有关的信息称为“前方图像信息IMG1”,将与由后方摄像机42拍摄的景物的图像有关的信息称为“后方图像信息IMG2”,将与由左侧摄像机43拍摄的景物的图像有关的信息称为“左侧图像信息IMG3”,将与由右侧摄像机44拍摄的景物的图像有关的信息称为“右侧图像信息IMG4”。此外,在下文中,根据需要,将前方图像信息IMG1、后方图像信息IMG2、左侧图像信息IMG3和右侧图像信息IMG4统称为“图像信息IMG”。
车辆停车辅助装置10在规定条件成立时,基于图像信息IMG来取得特征点F。特征点F是在由各摄像机45拍摄的图像中亮度变化大的规定范围的图像。
例如,在摄像机45拍摄图4所示的停车场62的情况下,取得混凝土制的砖块63B的角的部分、由草坪63L构成的地面63的角的部分以及由砖块63B构成的地面63与由草坪63L构成的地面63的边界部分等作为特征点F。
关于图4所示的停车场62的地面63,其由由混凝土63C构成的地面63和由草坪63L构成的地面63组成。另外,在停车场62的入口62ent并排设置有多个将侧沟盖住的混凝土制的砖块63B。因此,停车场62的入口62ent的地面63由砖块63B的表面组成。
车辆停车辅助装置10基于前方图像信息IMG1来取得车辆100的前方的规定范围71(参照图5)的地面63上的特征点F(以下,称为“前方特征点F1”)。另外,车辆停车辅助装置10基于后方图像信息IMG2来取得车辆100的后方的规定范围72(参照图5)的地面63上的特征点F(以下,称为“后方特征点F2”)。另外,车辆停车辅助装置10基于左侧图像信息IMG3来取得车辆100的左侧的规定范围73(参照图6)的地面63上的特征点F(以下,称为“左侧特征点F3”)。车辆停车辅助装置10基于右侧图像信息IMG4来取得车辆100的右侧的规定范围74(参照图6)的地面63上的特征点F(以下,称为“右侧特征点F4”)。
如图5所示,规定范围71是由线L711、线L712、线L713和线L714划定的范围。线L711是从前方摄像机41向车辆100的前方离开规定距离Dset并在车辆宽度方向Dy上延伸的线L711。线L712是穿过前方摄像机41并在车辆宽度方向Dy上延伸的线L712。线L713是从前方摄像机41向车辆100的左方离开规定距离Dset并在车辆前后方向Dx上延伸的线。线L714是从前方摄像机41向车辆100的右方离开规定距离Dset并在车辆前后方向Dx上延伸的线。以下,将规定范围71称为“前方范围71”。
前方范围71被分割为在车辆宽度方向Dy上被四等分且在车辆前后方向Dx上被二等分的八个范围71D。即,前方范围71被分割成面积相等的多个范围71D。以下,将这些范围71D称为“前方分割范围71D”。将前方分割范围71D中的、在车宽方向Dy上设定于左端的两个前方分割范围71D称为“左端分割范围71D3”,在车宽方向Dy上设定于右端的两个前方分割范围71D称为“右端分割范围71D4”,在车宽方向Dy上设定于中间的四个前方分割范围71D称为“中间分割范围71D5”。
另外,如图5所示,规定范围72是由线L721、线L722、线L723和线L724划定的范围。线L721是穿过后方摄像机42并在车辆宽度方向Dy上延伸的线。线L722是从后方摄像机42向车辆100的后方离开规定距离Dset并在车辆宽度方向Dy上延伸的线。线L723是从后方摄像机42向车辆100的左方离开规定距离Dset并在车辆前后方向Dx上延伸的线。线L724是从后方摄像机42向车辆100的右方离开规定距离Dset并在车辆前后方向Dx上延伸的线。以下,将规定范围72称为“后方范围72”。
后方范围72被分割为在车辆宽度方向Dy上被四等分且在车辆前后方向Dx上被二等分的八个范围72D。即,后方范围72被分割成面积相等的多个范围72D。以下,将这些范围72D称为“后方分割范围72D”。此外,将在后方分割范围72D中的、在车宽方向Dy设定于左端的两个后方分割范围72D称为“左端分割范围72D3”,将在车宽方向Dy设定于右端的两个后方分割范围72D称为“右端分割范围72D4”,将在车宽方向Dy设定于中间的四个后方分割范围72D称为“中间分割范围72D5”。
此外,如图6所示,规定范围73是由线L731、线L732、线L733和线L734划定的范围。线L731是从左侧摄像机43向车辆100的前方离开规定距离Dset并在车辆宽度方向Dy上延伸的线。线L732是从左侧摄像机43向车辆100的后方离开规定距离Dset并在车辆宽度方向Dy上延伸的线。线L733是从左侧摄像机43向车辆100的左方离开规定距离Dset并在车辆前后方向Dx上延伸的线。线L734是穿过左侧摄像机43在车辆前后方向Dx上延伸的线。以下,将规定范围73称为“左侧范围73”。
左侧范围73被分割为在车辆前后方向Dx上被四等分且在车辆宽度方向Dy上被二等分的八个范围73D。即,左侧范围73被分割成面积相等的多个范围73D。以下,将这些范围73D称为“左侧分割范围73D”。此外,将左侧分割范围73D中的、在车辆前后方向Dx上设定于前端的两个左侧分割范围73D称为“前端分割范围73D1”,将在车辆前后方向Dx上设定于后端的两个左侧分割范围73D称为“后端分割范围73D2”,将在车辆前后方向Dx上设定于中间的四个左侧分割范围73D称为“中间分割范围73D5”。
另外,如图6所示,规定范围74是由线L741、线L742、线L743及线L744划定的范围。线L741是从右侧摄像机44向车辆100的前方离开规定距离Dset并在车辆宽度方向Dy上延伸的线。线L742是从右侧摄像机44向车辆100的后方离开规定距离Dset并在车辆宽度方向Dy上延伸的线。线L743是穿过右侧摄像机44在车辆前后方向Dx上延伸的线。线L744是从右侧摄像机44向车辆100的右方离开规定距离Dset并在车辆前后方向Dx上延伸的线。以下,将规定范围74称为“右侧范围74”。
右侧范围74被分割为在车辆前后方向Dx上被四等分且在车辆宽度方向Dy上被二等分的八个范围74D。即,右侧范围74被分割成面积相等的多个范围74D。以下,将这些范围74D称为“右侧分割范围74D”。将右分割范围74D中的、设置在车辆前后方向Dx上的前端的两个右侧分割范围74D称为“前端分割范围74D1”,将设置在车辆前后方向Dx上的后端的两个右分侧割范围74D称为“后端分割范围74D2”,将设置在车辆前后方向Dx上的中间的四个右侧分割范围74D称为“中间分割范围74D5”。
在将摄像机45拍摄的与特征点F对应的范围的图像转换成俯视的图像的情况下,与特征点F对应的范围的转换后的图像为,如图7所示地一边为规定长度Lset的正方形的范围75的图像。车辆停车辅助装置10在规定的条件成立的情况下,将特征点F分割为25个相同的正方形的范围75D,并取得各范围75D的亮度LUM。然后,车辆停车辅助装置10分别求出从所取得的各亮度LUM减去这些亮度LUM的平均值LUMave而得到的值ΔLUM(=LUM-LUMave),并基于这些值ΔLUM取得特征点F处的亮度LUM的高低的倾向作为浓淡信息CT。即,车辆停车辅助装置10在规定的条件成立的情况下,取得由摄像机45拍摄的特征点F的图像中的浓淡的图案作为浓淡信息CT。
显示器50配置在驾驶者能够视觉确认的车辆100的部位。在本例中,显示器50是所谓的导航装置的显示器。
显示器50与ECU 90电连接。ECU 90能够使各种图像显示于显示器50。在本例中,ECU 90能够将拍摄图像51C、俯视图像51P、停车辅助开关图像51M、注册主开关图像52M、停车区划选择图像52S、停车区划线图像52、设定按钮图像53、注册开始按钮图像54、注册按钮图像55、停车开始按钮图像56、移动按钮图像57及角度调整按钮图像58显示在显示器50上。
拍摄图像51C是由摄像机45拍摄的图像。
俯视图像51P是包括车辆俯视图像及车辆周围图像的图像。车辆俯视图像是显示从竖直方向上方观察车辆100时的车辆100的图像。车辆周围图像是显示从竖直方向上方观察车辆100的周围时的车辆100的周围的图像,至少包括显示停车场62的图像。这些车辆俯视图像及车辆周围图像由ECU 90基于图像信息IMG制作。
停车辅助开关图像51M是与为了使车辆停车辅助装置10开始后述的停车辅助控制而由驾驶者进行触摸操作的停车辅助开关相当的图像。此外,在本例中,停车辅助开关以停车辅助开关图像51M的形式显示在显示器50上,但是也可以不显示在显示器50上,而是作为能够进行物理操作的开关设置在驾驶者能够操作的车辆100内的部位。
注册主开关图像52M是与为了通过后述的停车辅助控制使停车场信息Ipark注册(即,存储)到车辆停车辅助装置10中而由驾驶者进行触摸操作的注册主开关相当的图像。
停车区划选择图像52S如图9的(C)所示地包括左侧横列停车区划选择图像52SLa、左侧纵列停车区划选择图像52SLb、右侧横列停车区划选择图像52SRa以及右侧纵列停车区划选择图像52SRb。
左侧横列停车区划选择图像52SLa是为了选择将车辆100的朝向改变90度而停车到车辆100的左侧的停车场62的停车区划61而由驾驶者进行触摸操作的图像。停车区划61是通过后述的停车辅助控制使车辆100停车的区划(或范围或区域)。如图8所示,停车区划61被设定在停车场62内。左侧纵列停车区划选择图像52SLb是为了选择不改变车辆100的朝向地使车辆100停车到车辆100的左侧的停车场62的停车区划61而由驾驶者进行触摸操作的图像。右侧横列停车区划选择图像52SRa是为了选择将车辆100的朝向改变90度而停车到车辆100的右侧的停车场62的停车区划61而由驾驶者进行触摸操作的图像。右侧纵列停车区划选择图像52SRb是为了选择不改变车辆100的朝向地使车辆100停车到车辆100的右侧的停车场62的停车区划61而由驾驶者进行触摸操作的图像。
此外,在车辆100的左侧的停车场62不存在将车辆100的朝向改变90度而停车的停车区划61的情况下,左侧横列停车区划选择图像52SLa不显示于显示器50或者减小亮度(所谓的降低色调)地显示于显示器50。同样地,在车辆100的左侧的停车场62不存在不改变车辆100的朝向地停车的停车区划61的情况下,左侧纵列停车区划选择图像52SLb不显示于显示器50或者减小亮度(所谓的降低色调)地显示于显示器50。同样地,在车辆100的右侧的停车场62不存在将车辆100的朝向改变90度地停车的停车区划61的情况下,右侧横列停车区划选择图像52SRa不显示于显示器50或者减小亮度(所谓的降低色调)地显示在显示器50上。同样地,在车辆100的右侧的停车场62不存在不改变车辆100的朝向地停车的停车区划61的情况下,右侧纵列停车区划选择图像52SRb不显示于显示器50或者减小亮度(所谓的降低色调)而显示于显示器50。
另外,在由驾驶者触摸操作了被降低色调地显示在显示器50上的停车区划选择图像52S的情况下,ECU 90不判断为与被触摸操作的停车区划选择图像52S对应的停车区划61被选择。
停车区划线图像52是显示停车区划61的图像。
设定按钮图像53是与为了在后述的停车辅助控制中设定(或确定或决定)使车辆100停车的停车区划61而由驾驶者进行触摸操作的设定按钮相当的图像。
注册开始按钮图像54是与为了开始后述的停车辅助控制的第一停车行驶处理而由驾驶者进行触摸操作的注册开始按钮相当的图像。
注册按钮图像55是为了将通过后述的停车辅助控制取得的停车场信息Ipark注册在车辆停车辅助装置10(特别是ECU 90的RAM)中而由驾驶者进行触摸操作的注册按钮相当的图像。停车场信息Ipark是用于车辆停车辅助装置10使车辆100自动地停车到停车场62的与停车场62相关的信息。
停车开始按钮图像56是与为了使车辆100停车到车辆停车辅助装置10中注册了的停车区划61而开始后述的停车辅助控制的、由驾驶者进行触摸操作的停车开始按钮相当的图像。
移动按钮图像57包括上方移动按钮图像57U、下方移动按钮图像57D、左方移动按钮图像57L及右方移动按钮图像57R。上方移动按钮图像57U是为了使停车区划线图像52在显示器50上向上方移动而由驾驶者进行操作的图像。下方移动按钮图像57D是为了使停车区划线图像52在显示器50上向下方移动而由驾驶者进行操作的图像。左方移动按钮图像57L是为了使停车区划线图像52在显示器50上向左方移动而由驾驶者进行操作的图像。右方移动按钮图像57R是为了使停车区划线图像52在显示器50上向右方移动而由驾驶者进行操作的图像。
角度调整按钮图像58包括左旋角度调整按钮图像58A及右旋角度调整按钮图像58B。左旋角度调整按钮图像58A是为了使停车区划线图像52在显示器50上向左旋转方向旋转而由驾驶者进行操作的图像。右旋角度调整按钮图像58B是为了使停车区划线图像52在显示器50上向右旋转方向旋转而由驾驶者进行操作的图像。
<车辆停车辅助装置的动作概要>
下面,对车辆停车辅助装置10的动作概要进行说明。车辆停车辅助装置10被配置为能够执行停车辅助控制。停车辅助控制是在不需要驾驶者操作加速踏板14、操作制动踏板15以及操作方向盘16的情况下将车辆100停车到停车区划61的控制。
存在通过白线等线(以下,称为“区划线”)划分了停车区划的停车场。在这样的停车场对车辆进行自动停车时,能够将由摄像机拍摄的区划线作为标记而使车辆自动行驶并停车到停车区划。
另一方面,也存在私人住宅的停车场等没有划分停车区划的区划线的停车场。在这样的停车场对车辆进行自动停车时,没有作为标记的区划线。车辆停车辅助装置10实施的停车辅助控制是包括如下控制的控制,即,包括使车辆自动地停车到该停车场并且注册关于该停车场的停车场信息的控制、以及使车辆自动地停车到注册了停车场信息的停车场的控制。
车辆停车辅助装置10在车速SPD为规定车速SPDth以下时进行搜索处理,所述搜索处理为在拍摄图像CMR中搜索具有与多个注册入口特征点Fent_reg的浓淡图案分别一致的浓淡图案的图像部分。车辆停车辅助装置10利用左侧图像信息IMG3和右侧图像信息IMG4进行该搜索处理。注册入口特征点Fent_reg是注册入口浓淡信息CTent_reg已通过停车辅助控制被注册(即,存储)在车辆停车辅助装置10中的入口特征点Fent,后面将进行详述。入口特征点Fent是通过停车辅助控制而取得的停车场62的入口62ent的特征点F。另外,注册入口浓淡信息CTent_reg是注册入口特征点Fent_reg的浓淡信息CT。另外,拍摄图像CMR是由摄像机45拍摄而取得的图像。
车辆停车辅助装置10在从拍摄图像CMR中提取到具有与多个注册入口特征点Fent_reg的浓淡图案分别一致的浓淡图案的图像部分的情况下,对这些提取到的多个图像部分的彼此的位置关系、和具有与这些多个图像部分的浓淡图案一致的浓淡图案的多个注册入口特征点Fent_reg的彼此的位置关系进行对照(或匹配)。
车辆停车辅助装置10在提取到的多个图像部分彼此的位置关系、和具有与这些多个图像部分的浓淡图案一致的浓淡图案的多个注册入口特征点Fent_reg彼此的位置关系一致的情况下,判断为在车辆100的附近存在已注册的停车场62。已注册的停车场62是停车场信息Ipark已通过停车辅助控制被注册(即,存储)在车辆停车辅助装置10中的停车场。
更具体而言,在基于左侧图像信息IMG3而提取的多个图像部分彼此的位置关系、和具有与这些多个图像部分的浓淡图案一致的浓淡图案的多个注册入口特征点Fent_reg彼此的位置关系为一致的情况下,车辆停车辅助装置10判断为在车辆100的左侧存在已注册的停车场62。
另一方面,在基于右侧图像信息IMG4而提取的多个图像部分彼此的位置关系、和具有与这些多个图像部分的浓淡图案一致的浓淡图案的多个注册入口特征点Fent_reg彼此的位置关系一致的情况下,车辆停车辅助装置10判断为在车辆100的右侧存在已注册的停车场62。
并且,车辆停车辅助装置10在从拍摄图像CMR中未提取到具有与多个注册入口特征点Fent_reg的浓淡图案一致的浓淡图案的图像部分的情况下,判断为在车辆100的附近不存在已注册的停车场62。或者,车辆停车辅助装置10在提取到的多个图像部分彼此的位置关系、和具有与这些多个图像部分的浓淡图案一致的浓淡图案的多个注册入口特征点Fent_reg彼此的位置关系不一致的情况下,也判断为在车辆100的附近不存在已注册的停车场62。
<停车场的注册>
在判断为车辆100停止在停车场62的入口62ent附近并且停车辅助开关图像51M被执行了触摸操作之后,注册开始按钮图像54被执行触摸操作从而停车场信息Ipark的注册开始时,车辆停车辅助装置10以如下方式取得临时入口信息Ient_pre和临时中间信息Imid_pre。此外,车辆停车辅助装置10如后述地将注册入口信息Ient_reg、注册场内信息Iin_reg和注册区划信息Iarea_reg注册(即,存储)为停车场信息Ipark。
在判断为车辆100停止在停车场62的入口62ent附近且判断为该停车场62不是已注册的停车场,且如图9的(A)所示地由驾驶者触摸操作显示在显示器50上的停车辅助开关图像51M时,车辆停车辅助装置10从显示器50清除停车辅助开关图像51M,如图9的(B)所示,将拍摄图像51C、俯视图像51P以及注册主开关图像52M显示在显示器50上。
当由驾驶者触摸操作了注册主开关图像52M时,车辆停车辅助装置10从显示器50中清除拍摄图像51C、俯视图像51P及注册主开关图像52M,如图9的(C)所示,将停车区划选择图像52S显示在显示器50上。
在由驾驶者触摸操作在显示器50上显示或者未降低色调地在显示器50上显示的停车区划选择图像52S的某一个时,车辆停车辅助装置10从显示器50清除停车区划选择图像52S,如图9的(D)所示,在显示器50上显示俯视图像51P、停车区划线图像52、设定按钮图像53、移动按钮图像57和角度调整按钮图像58。此时,车辆停车辅助装置10在车辆100的左侧存在未注册的停车场62的情况下,以在车辆图像的左侧显示停车场图像的方式将俯视图像51P显示于显示器50,在车辆100的右侧存在未注册的停车场62的情况下,以在车辆图像的右侧显示停车场图像的方式将俯视图像51P显示于显示器50。
另外,车辆停车辅助装置10基于图像信息IMG以及声纳信息SON,将在停车场62内可以让车辆100停车的范围设定为停车区划61,并将所述停车区划线图像52作为表示该设定的停车区划61的图像显示于显示器50。车辆停车辅助装置10例如为了取得停车场62的入口62ent的宽度等而使用声纳信息SON。
驾驶者通过触摸操作移动按钮图像57能够使停车区划线图像52在显示器50上移动,直至触摸操作设定按钮图像53为止。驾驶者通过在显示器50上移动停车区划线图像52,能够改变使车辆100停车的停车区划61的位置。而且,驾驶者通过触摸操作角度调整按钮图像58能够使停车区划线图像52在显示器50上转动,直至触摸操作设定按钮图像53为止。驾驶者通过在显示器50上旋转停车区划线图像52,能够改变使车辆100停车的停车区划61的位置。
在由驾驶者触摸操作了设定按钮图像53的情况下,车辆停车辅助装置10从显示器50上清除设定按钮图像53、移动按钮图像57以及角度调整按钮图像58,并如图10的(A)所示那样地显示拍摄图像51C、俯视图像51P以及注册开始按钮图像54。
而且,在由驾驶者触摸操作了设定按钮图像53的情况下,车辆停车辅助装置10将与显示器50中显示的停车区划线图像52对应的位置的停车区划61设定为注册对象停车区划61set。
并且,在由驾驶者触摸操作了设定按钮图像53的情况下,车辆停车辅助装置10设定为了将车辆100停车到注册对象停车区划61set而使车辆100行驶的目标行驶路线Rtgt。例如,如图11所示,在车辆100在未注册的停车场62的右侧停止的情况下,车辆停车辅助装置10如图12所示那样地设定目标行驶路线Rtgt。
此外,在车辆100停止在停车场62的右侧时由驾驶者触摸操作了设定按钮图像53的情况下,车辆停车辅助装置10针对左侧范围73的中间分割范围73D5、前端分割范围73D1和后端分割范围73D2分别取得一个以上的规定数量的新增左侧特征点F3new作为入口特征点Fent。另一方面,在车辆100停止在停车场62的左侧时由驾驶者触摸操作了设定按钮图像53的情况下,车辆停车辅助装置10针对右侧范围74的中间分割范围74D5、前端分割范围74D1以及后端分割范围74D2分别取得一个以上的规定数量的新增右侧特征点F4new作为入口特征点Fent。
在本例中,在车辆100停止在停车场62的右侧时驾驶者触摸操作了设定按钮图像53的情况下,车辆停车辅助装置10针对各个中间分割范围73D5,分别取得与前端分割范围73D1以及后端分割范围73D2相比数量更多的入口特征点Fent。即,在多个范围73D5、73D1及73D2中距停车场62的入口62ent的中央近的范围73D5,与所述多个范围中距停车场62的入口62ent的中央远的范围73D1及73D2相比,车辆停车辅助装置10取得更多数量的入口特征点Fent。
另一方面,在车辆100停止在停车场62的左侧时驾驶者触摸操作了设定按钮图像53的情况下,车辆停车辅助装置10针对各个中间分割范围74D5,分别取得与前端分割范围74D1以及后端分割范围74D2相比数量更多的入口特征点Fent。即,在多个范围74D5、74D1及74D2中距停车场62的入口62ent的中央近的范围74D5,与所述多个范围中距停车场62的入口62ent的中央远的范围74D1及74D2相比,车辆停车辅助装置10取得更多数量的入口特征点Fent。
例如,在车辆100如图11所示地停止在停车场62的右侧的情况下,车辆停车辅助装置10如图13和图14所示地针对左侧范围73的四个中间分割范围73D5分别取得两个新增左侧特征点F3new,作为入口特征点Fent,针对两个前端分割范围73D1分别取得一个新增左侧特征点F3new作为入口特征点Fent,针对两个后端分割范围73D2分别取得一个新增左侧特征点F3new作为入口特征点Fent。另外,在车辆100停止在停车场62的左侧的情况下,车辆停车辅助装置10针对右侧范围74的四个中间分割范围74D5分别取得两个新增右侧特征点F4new作为入口特征点Fent,针对两个前端分割范围74D1分别取得一个新增右侧特征点F4new作为入口特征点Fent,针对两个后端分割范围74D2分别取得一个新增右侧特征点F4new作为入口特征点Fent。
此外,车辆停车辅助装置10也可以被配置为,在驾驶者使车辆100在停车场62的入口62ent的右侧停止时,若使车辆100在略微未至停车场62的入口62ent的正侧方的位置停止的情况较多,则与各后端分割范围73D2以及与其相邻的两个中间分割范围73D5相比,针对各前端分割范围73D1以及与其相邻的两个中间分割范围73D5取得更多数量的入口特征点Fent。同样地,车辆停车辅助装置10也可以被配置为,在驾驶者使车辆100在停车场62的入口62ent的左侧停止时,若使车辆100在略微未至停车场62的入口62ent的正侧方的位置停止的情况较多,则与后端分割范围74D2及与其相邻的两个中间分割范围74D5相比,针对前端分割范围74D1及与其相邻的两个中间分割范围74D5取得更多数量的入口特征点Fent。
另外,车辆停车辅助装置10在左侧范围73的中间分割范围73D5、前端分割范围73D1和后端分割范围73D2的一部分的范围内不能够取得规定数量的新增左侧特征点F3new的情况下,在剩余的范围73D5、73D1和73D2中取得数量与不能够取得的新增左侧特征点F3new的数量相等的新增左侧特征点F3new,作为入口特征点Fent。同样地,车辆停车辅助装置10在右侧范围74的中间分割范围74D5、前端分割范围74D1和后端分割范围74D2的一部分的范围内不能够取得规定数量的新增右侧特征点F4new的情况下,在剩余的范围74D5、74D1和74D2中取得数量与不能够取得的新增右侧特征点F4new的数量相等的新增右侧特征点F4new,作为入口特征点Fent。
车辆停车辅助装置10在取得入口特征点Fent之后,将取得的入口特征点Fent在临时坐标系Cpre中的坐标XY作为临时入口坐标XYent_pre取得并存储,并且将取得的入口特征点Fent的浓淡信息CT作为临时入口浓淡信息CTent_pre取得并存储。临时坐标系Cpre是以注册对象停车区划61set内的规定位置Ppre为原点的坐标系。因此,临时入口坐标XYent_pre是以规定位置Ppre为基准的入口特征点Fent的位置。此外,临时入口信息Ient_pre包括临时入口坐标XYent_pre和临时入口浓淡信息CTent_pre。
在驾驶者触摸操作了注册开始按钮图像54的情况下,车辆停车辅助装置10从显示器50清除注册开始按钮图像54,如图10的(B)所示,在显示器50上继续显示拍摄图像51C及俯视图像51P。此时,在车辆100的左侧存在未注册的停车场62的情况下,车辆停车辅助装置10将作为由左侧摄像机43拍摄的图像的、包括未注册的停车场62的图像,作为拍摄图像51C显示于显示器50,并且以在车辆图像的左侧显示停车场图像的方式将俯视图像51P显示于显示器50。另一方面,在车辆100的右侧存在未注册的停车场62的情况下,车辆停车辅助装置10将作为由右侧摄像机44拍摄的图像的、包括未注册的停车场62的图像,作为拍摄图像51C显示于显示器50,并且以在车辆图像的右侧显示停车场图像的方式将俯视图像51P显示于显示器50。
并且,在驾驶者触摸操作了注册开始按钮图像54的情况下,车辆停车辅助装置10实施使车辆100沿着目标行驶路线Rtgt行驶至注册对象停车区划61set的第一停车行驶处理。第一停车行驶处理是基于“图像信息IMG、物体信息OBJ、转向角θst、转向转矩TQst、车速SPD、车辆横摆率YR、车辆前后方向加速度Gx及车辆横向加速度Gy”来控制车辆驱动力产生装置11的动作、制动装置12的动作及转向装置13的动作,以使车辆100沿目标行驶路线Rtgt行驶的处理。
例如,在车辆100如图11所示那样地在未注册的停车场62的右侧停止的情况下,车辆停车辅助装置10开始第一停车行驶处理时,首先如图15所示地使车辆100右转弯的同时前进然后停止。接着,如图16所示,车辆停车辅助装置10使车辆100左转弯的同时后退。
车辆停车辅助装置10在到车辆100向停车场62的停车完成为止的期间内至少一次地取得特征点F,并取得该特征点F在临时坐标系Cpre中的坐标XY以及该特征点F的浓淡信息CT。特别地,在为了使车辆100停车到停车场62而开始了车辆100的行驶之后,在预测为车辆100在此以后不转弯而笔直地行驶时,车辆停车辅助装置10至少一次地取得特征点F,并取得该特征点F在临时坐标系Cpre中的坐标XY以及该特征点F的浓淡信息CT。
在本例中,在使车辆100后退的期间内,在预测为车辆100在此以后不转弯而笔直地行驶的时间点(参照图17),车辆停车辅助装置10取得后方特征点F2,作为新增后方特征点F2new。此外,车辆停车辅助装置10也可以在使车辆100后退的期间内,在预测为车辆100在此以后不转弯而笔直地行驶之后车辆100后退了规定距离Dtravel_th的时间点,取得后方特征点F2。或者,车辆停车辅助装置10也可以在使车辆100后退的期间内,在预测为车辆100在此以后不转弯而笔直地行驶的时点、以及此后车辆100后退了规定距离Dtravel_th的时间点,取得后方特征点F2。另外,车辆停车辅助装置10也可以在使车辆100后退的期间内,在预测为车辆100在此以后不转弯而笔直地行驶的时间点、以及此后车辆100每后退规定距离Dtravel_th时,取得后方特征点F2。另外,车辆停车辅助装置10也可以在使车辆100后退的期间内,在预测为车辆100在此以后不转弯而笔直地行驶之后车辆100每后退规定距离Dtravel_th时,取得后方特征点F2。另外,车辆停车辅助装置10除了取得后方特征点F2之外,还可以取得前方特征点F1、左侧特征点F3以及右侧特征点F4中的至少一个。
在本示例中,所述规定距离Dtravel_th被设置为此前最近一次取得后方特征点F2时的后方范围72不与本次取得后方特征点F2时的后方范围72重叠的距离。
而且,车辆停车辅助装置10取得分别存在于各后方分割范围72D的至少一个以上的新增后方特征点F2new作为中间特征点Fmid。车辆停车辅助装置10将取得的中间特征点Fmid在临时坐标系Cpre中的坐标XY作为临时中间坐标XYmid_pre取得并存储,并且将取得的中间特征点Fmid的浓淡信息CT作为临时中间浓淡信息CTmid_pre取得并存储。临时中间坐标XYmid_pre是以规定位置Ppre作为基准的中间特征点Fmid的位置。临时中间信息Imid_pre包括临时中间坐标XYmid_pre和临时中间浓淡信息CTmid_pre。
车辆停车辅助装置10在第一停车行驶处理的执行过程中实施安全判断处理,所述安全判断处理为,判断在使车辆100沿着目标行驶路线Rtgt行驶时是否能够使车辆100不与停车场62中存在的立体物体接触地安全地行驶至注册对象停车区划61set。车辆停车辅助装置10在判断为不能够使车辆100安全地行驶至注册对象停车区划61set的情况下,对目标行驶路线Rtgt进行校正,以使车辆100能够安全地行驶至注册对象停车区划61set。车辆停车辅助装置10利用在第一停车行驶处理的执行过程中取得的图像信息IMG和物体信息OBJ来进行所述安全判断处理。
另外,车辆停车辅助装置10在第一停车行驶处理的执行过程中进行路线判断处理,所述路线判断处理为,判断在使车辆100沿着目标行驶路线Rtgt行驶时是否能够使车辆100停车在注册对象停车区划61set内。车辆停车辅助装置10在判断为不能够使车辆100停车在注册对象停车区划61set内的情况下,校正目标行驶路线Rtgt,以使车辆100能够停车在注册对象停车区划61set内。车辆停车辅助装置10使用在第一停车行驶处理的执行过程中取得的图像信息IMG(特别是特征点F)来进行所述路线判断处理。
车辆停车辅助装置10在车辆100整体进入了注册对象停车区划61set内时(参照图18),使车辆100停止并结束第一停车行驶处理。由此,车辆100向停车场62的停车结束。此时,车辆停车辅助装置10分别取得前方特征点F1、左侧特征点F3以及右侧特征点F4作为新增前方特征点F1new、新增左侧特征点F3new以及新增右侧特征点F4new。此时,车辆停车辅助装置10也可以取得后方特征点F2作为新增后方特征点F2new。
然后,车辆停车辅助装置10取得存在于各前方分割范围71D的至少一个以上的新增前方特征点F1new作为最终特征点Ffin,取得存在于各左侧分割范围73D的至少一个以上的新增左侧特征点F3new作为最终特征点Ffin,取得存在于各右侧分割范围74D的至少一个以上的新增右侧特征点F4new作为最终特征点Ffin。此时,车辆停车辅助装置10在取得了新增后方特征点F2new的情况下,也可以将存在于各后方分割范围72D的至少一个以上的新增后方特征点F2new作为最终特征点Ffin来取得。
<停车场信息的注册>
另外,车辆停车辅助装置10在车辆100向停车场62的停车结束的情况下,从显示器50清除拍摄图像51C,如图10的(C)所示,将俯视图像51P、注册按钮图像55、移动按钮图像57以及角度调整按钮图像58显示在显示器50上。
驾驶者通过触摸操作移动按钮图像57而能够使停车区划线图像52在显示器50上移动,直至触摸操作了注册按钮图像55为止。驾驶者通过在显示器50上移动停车区划线图像52,能够改变使车辆100停车的停车区划61的位置。而且,驾驶者通过触摸操作角度调整按钮图像58而能够使停车区划线图像52在显示器50上转动,直至触摸操作了注册按钮图像55为止。驾驶者通过在显示器50上旋转停车区划线图像52,能够改变使车辆100停车的停车区划61的位置。
车辆停车辅助装置10在驾驶者触摸操作了注册按钮图像55的情况下,将取得的最终特征点Ffin在注册坐标系Creg中的坐标XY作为注册场内坐标XYin_reg来取得并注册(即存储),并且将取得的最终特征点Ffin的浓淡信息CT作为注册场内浓淡信息CTin_reg来取得并注册(即存储)。注册坐标系Creg是将连接车辆100向注册对象停车区域61set的停车结束时的车辆100的左后轮和右后轮的车轴的车辆宽度方向Dy的中央的规定位置Preg作为原点的坐标系(参照图18)。因此,注册场内坐标XYin_reg是以规定位置Preg为基准的最终特征点Ffin的位置。
此外,车辆停车辅助装置10将临时中间坐标XYmid_pre转换为注册坐标系Creg中的坐标XY,取得并注册(即,存储)为注册场内坐标XYin_reg,并且将临时中间浓淡信息CTmid_pre注册(即,存储)为注册场内浓淡信息CTin_reg。因此,注册场内坐标XYin_reg是以规定位置Preg为基准的中间特征点Fmid的位置。
注册场内信息Iin_reg包括注册场内坐标XYin_reg和注册场内浓淡信息CTin_reg。
并且,车辆停车辅助装置10将注册坐标系Creg中的注册对象停车区划61set的坐标XY注册(即,存储)为注册区划坐标XYarea_reg。注册区划坐标XYarea_reg是以规定位置Preg为基准的停车区划61的位置。注册区划信息Iarea_reg包括注册区划坐标XYarea_reg。
此外,车辆停车辅助装置10将临时入口坐标XYent_pre转换成注册坐标系Creg中的坐标XY,取得并注册(即,存储)为注册入口坐标XYent_reg,并且将临时入口浓淡信息CTent_pre注册(即,存储)为注册入口浓淡信息CTent_reg。因此,注册入口坐标XYent_reg是以规定位置Preg为基准的入口特征点Fent的位置。注册入口信息Ient_reg包括注册入口坐标XYent_reg及注册入口浓淡信息CTent_reg。
如上所述,停车场信息Ipark包括注册入口信息Ient_reg、注册场内信息Iin_reg和注册区划信息Iarea_reg。
<车辆向已注册的停车场的停车>
在车辆停车辅助装置10判断为车辆100在停车场62的入口62ent附近停止并且判断为该停车场62是已注册的停车场时,如图10的(A)所示那样由驾驶者触摸操作了显示于显示器50的停车辅助开关图像51M,则车辆停车辅助装置10从显示器50清除停车辅助开关图像51M,如图19的(B)所示那样将拍摄图像51C、俯视图像51P、注册主开关图像52M以及停车开始按钮图像56显示于显示器50。此时,在车辆100的左侧存在已注册的停车场62的情况下,车辆停车辅助装置10将作为由左侧摄像机43拍摄的图像的、包括已注册的停车场62的图像作为拍摄图像51C显示在显示器50上,并且以在车辆图像的左侧显示停车场图像的方式将俯视图像51P显示在显示器50上。另一方面,在车辆100的右侧存在已注册的停车场62的情况下,车辆停车辅助装置10将作为由右侧摄像机44拍摄的图像的、包括已注册的停车场62的图像作为拍摄图像51C显示在显示器50上,并且以在车辆图像的右侧显示停车场图像的方式将俯视图像51P显示在显示器50上。
此外,车辆停车辅助装置10基于在与本次使车辆100停车的已注册的停车场62相关的停车场信息Ipark中包含的注册区划坐标XYarea_reg,确定停车区划61的位置。
在驾驶者触摸操作了停车开始按钮图像56的情况下,车辆停车辅助装置10从显示器50清除注册主开关图像52M以及停车开始按钮图像56,如图19的(C)所示地在显示器50上继续显示拍摄图像51C以及俯视图像51P。
此外,在驾驶者触摸操作了停车开始按钮图像56时,车辆停车辅助装置10将被注册为停车场信息Ipark的停车区划61设定为目标停车区划61tgt。
并且,在驾驶者触摸操作了停车开始按钮图像56的情况下,车辆停车辅助装置10设定为了使车辆100停车到目标停车区划61tgt而使车辆100行驶的目标行驶路线Rtgt。
然后,车辆停车辅助装置10实施使车辆100沿着目标行驶路线Rtgt行驶至目标停车区划61tgt的第二停车行驶处理。第二停车行驶处理是基于“图像信息IMG、物体信息OBJ、转向角θst、转向转矩TQst、车速SPD、车辆横摆率YR、车辆前后方向加速度Gx及车辆横向加速度Gy”来控制车辆驱动力产生装置11的动作、制动装置12的动作及转向装置13的动作,以使车辆100沿目标行驶路线Rtgt行驶的处理。
另外,车辆停车辅助装置10在第二停车行驶处理的执行过程中进行安全判断处理,所述安全判断处理为,判断在使车辆100沿着目标行驶路线Rtgt行驶时是否能够使车辆100不与存在于停车场62的立体物体接触地安全地行驶至目标停车区划61tgt。在判断为不能够使车辆100安全地行驶至目标停车区划61tgt的情况下,车辆停车辅助装置10对目标行驶路线Rtgt进行校正,以使车辆100能够安全地行驶至目标停车区划61tgt。车辆停车辅助装置10利用在第二停车行驶处理的执行过程中取得的图像信息IMG和物体信息OBJ来进行所述安全判断处理。
车辆停车辅助装置10在第二停车行驶处理的执行过程中进行搜索处理,所述搜索处理在拍摄图像CMR中搜索具有与多个注册特征点Freg的浓淡图案分别一致的浓淡图案的图像部分。车辆停车辅助装置10利用后方图像信息IMG2、左侧图像信息IMG3和右侧图像信息IMG4进行该搜索处理。注册特征点Freg是通过停车辅助控制而注册了注册场内浓淡信息CTin_reg的特征点F。
在从拍摄图像CMR中提取到具有与多个注册特征点Freg的浓淡图案分别一致的浓淡图案的图像部分的情况下,车辆停车辅助装置10对这些被提取的多个图像部分彼此的位置关系、和具有与这些多个图像部分的浓淡图案一致的浓淡图案的多个注册特征点Freg彼此的位置关系进行对照(或者匹配)。
车辆停车辅助装置10在提取的多个图像部分彼此的位置关系、和具有与这些多个图像部分的浓淡图案一致的浓淡图案的多个注册特征点Freg彼此的位置关系一致的情况下,进行停车位置判断处理,所述停车位置判断处理为,基于具有与提取到的图像部分的浓淡图案一致的浓淡图案的注册特征点Freg的坐标XY与注册区划坐标XYarea_reg之间的位置关系,判断停车场62内的目标停车区划61tgt的位置是否与注册区划坐标XYarea_reg所示的位置为一致。在判断为停车场62中的目标停车区域61tgt的位置与注册区划坐标XYarea_reg所示的位置不一致的情况下,车辆停车辅助装置10对目标停车区划61tgt的位置进行校正,以使停车场62中的目标停车区划61tgt的位置与注册区划坐标XYarea_reg所示的位置一致,并且对目标行驶路线Rtgt进行校正,以使车辆100能够停车到位置校正后的目标停车区划61tgt。
车辆停车辅助装置10在车辆100整体进入了目标停车区划61tgt内时,使车辆100停止并结束第二停车行驶处理。由此,车辆100向停车场62的停车结束。
以上是车辆停车辅助装置10的动作概要。由此,不是针对停车场62内的立体物体、停车场62周边的立体物体的特征点,而是将与停车场62内的地面63及停车场62周边的地面63的特征点F相关的信息作为注册入口信息Ient_reg进行注册。即使在注册了注册入口信息Ient_reg时和此后车辆100到达已注册的停车场62的入口62ent时围绕车辆100、停车场62的状况不同,由摄像机45拍摄的停车场62内的地面63、停车场62周边的地面63的图像的变化也小。因此,即使在注册了注册入口信息Ient_reg时和此后车辆100到达已注册的停车场62的入口62ent时围绕车辆100、停车场62的状况不同,在到达已注册的停车场62的入口62ent时取得了与注册了注册入口信息Ient_reg的入口特征点Fent对应的入口特征点Fent的情况下,也能够判断为该入口特征点Fent是注册了注册入口信息Ient_reg的入口特征点Fent,其结果为,能够判断停车场62是已注册的停车场62。因此,能够使车辆100自动地停车到已注册的停车场62。
<车辆停车辅助装置的具体动作>
接着,对车辆停车辅助装置10的具体动作进行说明。车辆停车辅助装置10的ECU 90的CPU被配置为每经过规定时间就执行图20所示的例程。
因此,在到达规定的时刻时,CPU从步骤2000开始进行处理,使该处理进入步骤2005,判断停车辅助开关操作标识X1_auto的值是否为“1”。在判断为车辆100在停车场62的入口62ent附近停止且判断为该停车场62不是已注册的停车场且停车辅助开关图像51M被进行了触摸操作时,停车辅助开关操作标识X1_auto的值被设定为“1”,在车辆100向停车场62的停车结束时被设定为“0”。
CPU在步骤2005中判断为“是”的情况下,使处理进入步骤2010,判断第一停车行驶处理标识X1_exe的值是否为“0”。第一停车行驶处理标识X1_exe的值在开始第一停车行驶处理时被设定为“1”,在结束第一停车行驶处理时被设定为“0”。
CPU在步骤2010中判断为“是”的情况下,使处理进入步骤2015,将拍摄图像51C、俯视图像51P以及注册主开关图像52M显示于显示器50(参照图9的(B))。接着,CPU使处理进入步骤2020,判断注册主开关操作标识Xmain的值是否为“1”。注册主开关操作标识Xmain的值在注册主开关图像52M被触摸操作时被设定为“1”,在车辆100向停车场62的停车结束时被设定为“0”。
CPU在步骤2020中判断为“是”的情况下,使处理进入步骤2025,从显示器50清除拍摄图像51C、俯视图像51P及注册主开关图像52M,并将停车区划选择图像52S显示于显示器50(参照图9的(C))。然后,CPU使处理进入步骤2030,判断选择完成标识Xselect的值是否是“1”。选择完成标识Xselect的值在停车区划选择图像52S的任一个被触摸操作时被设定为“1”,在车辆100向停车区划62的停车完成时被设定为“0”。
CPU在步骤2030中判断为“是”的情况下,使处理进入步骤2035,并且执行图21所示的例程。因此,CPU在使处理进入到步骤2035后,即从图21的步骤2100开始处理,使该处理进入到步骤2105,清除停车区划选择图像52S,将俯视图像51P、停车区划线图像52、设定按钮图像53、移动按钮图像57和角度调整按钮图像58显示在显示器50上(参照图9的(D))。
接着,CPU使处理进入步骤2110,判断设定完成标识Xset的值是否为“1”。设定完成标识Xset的值在设定按钮图像53被触摸操作时被设定为“1”,在开始了第一停车行驶处理时被设定为“0”。
CPU在步骤2110中确定为“是”的情况下,使处理进入步骤2115,从显示器50清除设定按钮图像53、移动按钮图像57和角度调整按钮图像58,并且在显示器50上显示拍摄图像51C、俯视图像51P和注册开始按钮图像54(参见图10A)。接着,CPU使处理进入到步骤2120,将与停车区划线图像52对应的停车区划61设定为注册对象停车区划61set。接着,CPU使处理进入步骤2125,将到注册对象停车区划61set为止的车辆100的行驶路线设定为目标行驶路线Rtgt。接着,CPU使处理进入到步骤2130,并如上所述地取得临时入口信息Ient_pre,并将其存储在RAM中。
接着,CPU使处理进入到步骤2135,判断注册开始标识Xreg_start的值是否是“1”。注册开始标识Xreg_start的值在注册开始按钮图像54被触摸操作时被设定为“1”,在第一停车行驶处理开始时被设定为“0”。
CPU在步骤2135中判断为“是”时,使处理进入步骤2140,从显示器50清除注册开始按钮图像54,在显示器50上显示拍摄图像51C及俯视图像51P(参照图10(B))。接着,CPU使处理进入步骤2145,开始使车辆100沿着目标行驶路线Rtgt行驶至注册对象停车区划61set的第一停车行驶处理。之后,CPU使处理经由步骤2195进入图20的步骤2095,暂时结束本例程。
另一方面,CPU在步骤2135中判断为“否”时,使处理经由步骤2195进入图20的步骤2095,暂时结束本例程。
另外,CPU在步骤2120中判断为“否”的情况下,也使处理经由步骤2195进入图20的步骤2095,暂时结束本例程。
CPU在图20的步骤2030中判断为“否”的情况下,使处理直接进入到步骤2095,暂时结束本例程。
另外,CPU在步骤2020中判断为“否”的情况下,也使处理直接进入到步骤2095,暂时结束本例程。
此外,CPU在步骤2010中判断为“否”的情况下,使处理进入到步骤2060,判断中间信息取得标识Xmid的值是否是“1”。中间信息取得标识Xmid的值,在车辆100在后退的期间内预测为车辆100在此以后不转弯而笔直行驶时被设定为“1”,在进行了步骤2065的处理时被设定为“0”。
CPU在步骤2060中判断为“是”的情况下,使处理进入到步骤2065,如前所述那样取得临时中间信息Imid_pre并存储于RAM。接着,CPU使处理进入到步骤2070。
另一方面,CPU在步骤2060中判断为“否”的情况下,使处理直接进入步骤2070。
CPU在使处理进入到步骤2070后,继续执行第一停车行驶处理。接着,CPU使处理进入步骤2075,判断停车完成标识Xpark_fin的值是否为“1”。停车完成标识Xpark_fin的值在车辆100整体进入了注册对象停车区划61set内时被设定为“1”,在第一停车行驶处理结束时被设定为“0”。
CPU在步骤2075中判断为“是”的情况下,使处理进入到步骤2080,结束第一停车行驶处理。接着,CPU使处理进入到步骤2095,暂时结束本例程。
另一方面,CPU在步骤2075中判断为“否”的情况下,使处理直接进入到步骤2095,暂时结束本例程。
另外,CPU在步骤2005中判断为“否”的情况下,使处理进入步骤2090,结束向显示器50显示俯视图像51P等图像。接着,CPU使处理进入到步骤2095,暂时结束本例程。
进而,CPU每经过规定时间就执行图22所示的例程。因此,在到达规定的时刻时,CPU从图22的步骤2200开始处理,使该处理进入步骤2205,判断信息注册请求标识Xreg_req的值是否为“1”。信息注册请求标识Xreg_req的值在通过第一停车行驶处理使车辆100向停车场62的停车完成时被设定为“1”,在停车场信息Ipark被注册到RAM时被设定为“0”。
CPU在步骤2205中判断为“是”的情况下,使处理进入步骤2210,从显示器50中清除拍摄图像51C,并在显示器50上显示俯视图像51P、移动按钮图像57、角度调整按钮图像58以及注册按钮图像55(参照图10的(C))。接着,CPU使处理进入到步骤2215,判断注册确定标识Xreg_det的值是否为“1”。注册确定标识Xreg_det的值在注册按钮图像55被触摸操作时被设定为“1”,在进行了步骤2120的处理时被设定为“0”。
CPU在步骤2215中确定为“是”的情况下,使处理进入步骤2220,如上所述地将注册入口信息Ient_reg、注册场内信息Iin_reg和注册区划信息Iarea_reg作为停车场信息Ipark注册在RAM中。然后,CPU使处理进入到步骤2295,暂时结束本例程。
另一方面,CPU在步骤2215中判断为“否”的情况下,使处理直接进入到步骤2295,暂时结束本例程。
此外,CPU在步骤2205中判断为“否”的情况下,使处理直接进入到步骤2295,暂时结束该例程。
进而,CPU每经过规定时间就执行图23所示的例程。因此,在到达规定的时刻时,CPU从图23的步骤2300开始处理,使该处理进入步骤2305,判断停车辅助开关操作标识X2_auto的值是否为“1”。在判断为车辆100在停车场62的附近停止、且判断为该停车场62是已注册的停车场、且停车辅助开关图像51M被触摸操作时,停车辅助开关操作标识X2_auto的值设定为“1”,在车辆100向停车场62的停车结束时被设定为“0”。
CPU在步骤2305中判断为“是”的情况下,使处理进入步骤2310,判断第二停车行驶处理标识X2_exe的值是否为“0”。第二停车行驶处理标识X2_exe的值在开始第二停车行驶处理时被设定为“1”,在结束第二停车行驶处理时被设定为“0”。
CPU在步骤2310中判断为“是”的情况下,使处理进入步骤2315,从显示器50清除停车辅助开关图像51M,将拍摄图像51C、俯视图像51P、注册主开关图像52M以及停车开始按钮图像56显示在显示器50上(参照图19的(B))。
接着,CPU使处理进入步骤2317,判断注册主开关操作标识Xmain的值是否是“0”。注册主开关操作标识Xmain的值在注册主开关图像52M被触摸操作时被设定为“1”,在车辆100向停车场62的停车结束时被设定为“0”。
CPU在步骤2317中判断为“是”的情况下,使处理进入步骤2320,判断停车开始标识Xpark_start的值是否为“1”。停车开始标识Xpark_start的值在停车开始按钮图像56被触摸操作时被设定为“1”,在开始了第二停车行驶处理时被设定为“0”。
CPU在步骤2320中判断为“是”的情况下,使处理进入到步骤2325,从显示器50清除注册主开关图像52M和停车开始按钮图像56。此时,CPU继续在显示器50上显示拍摄图像51C以及俯视图像51P(参照图19C)然后,CPU使处理进入步骤2330,将作为停车场信息Ipark而注册了的停车区划61设定为目标停车区划61tgt。接着,CPU使处理进入步骤2335,将使车辆100行驶至目标停车区划61tgt的行驶路线设定为目标行驶路线Rtgt。接着,CPU使处理进入步骤2340,开始第二停车行驶处理。之后,CPU使处理进入步骤2395,暂时结束本例程。
另一方面,CPU在步骤2320中判断为“否”的情况下,使处理直接进入步骤2395,暂时结束本例程。
另外,CPU在步骤2317中判断为“否”的情况下,使处理进入步骤2342,将停车辅助开关操作标识X1_auto的值设定为“1”。接着,CPU使处理进入步骤2395,暂时结束本例程。由此,在图20的步骤2005中判断为“是”。
另外,CPU在步骤2310中判断为“否”的情况下,使处理进入步骤2345,继续执行第二停车行驶处理。之后,CPU使处理进入步骤2350,判断停车完成标识Xpark_fin的值是否为“1”。停车完成标识Xpark_fin的值在车辆100整体进入了目标停车区划61tgt内时被设定为“1”,在第二停车行驶处理结束时被设定为“0”。
CPU在步骤2350中判断为“是”的情况下,使处理进入到步骤2355,结束第二停车行驶处理。接着,CPU使处理进入步骤2395,暂时结束本例程。
另一方面,CPU在步骤2350中判断为“否”时,使处理直接进入步骤2395,暂时结束本例程。
另外,CPU在步骤2305判断为“否”的情况下,使处理进入步骤2360,结束向显示器50的俯视图像51P等图像的显示。接着,CPU使处理进入步骤2395,暂时结束本例程。
以上是车辆停车辅助装置10的具体动作。由此,不是针对停车场62内的立体物体、停车场62周边的立体物体的特征点,而是将与停车场62内的地面63及停车场62周边的地面63的特征点F相关的信息作为注册入口信息Ient_reg进行注册(参照图22的步骤2220)。因此,即使在注册了注册入口信息Ient_reg时和此后车辆100到达已注册的停车场62的入口62ent时围绕车辆100、停车场62的状况不同,在到达已注册的停车场62的入口62ent时取得了与注册了注册入口信息Ient_reg的入口特征点Fent对应的入口特征点Fent的情况下,也能够判断为该入口特征点Fent是注册了注册入口信息Ient_reg的入口特征点Fent,其结果为,能够判断为停车场62是已注册的停车场62。因此,能够使车辆100自动地停车到已注册的停车场62。
另外,本发明不限于所述实施方式,在本发明的范围内可以采用各种变形例。
附图标记说明
10…车辆停车辅助装置;
11…车辆驱动力产生装置;
12…制动装置;
13…转向装置;
30…声纳传感器装置;
40…摄像机装置;
51C…拍摄图像;
51P…俯视图像;
52…停车区划线图像;
61…停车区划;
62…停车场;
63…地面;
73…左侧范围;
74…右侧范围;
90…ECU;
100…车辆;
F…特征点。
- 停车辅助装置、停车辅助装置的车辆侧装置、停车辅助方法及停车辅助程序
- 停车辅助装置,停车辅助方法以及车辆辅助控制程序