一种车载式道路光照度采集方法
文献发布时间:2023-06-19 10:38:35
技术领域
本发明涉及光照度采集领域,尤其涉及一种车载式道路光照度采集方法。
背景技术
近年来,随着城镇化发展迅速,道路作为城镇建设不可缺少的一部分,也随之快速的发展起来,而在道路上设置的道路照明设施,主要是为了给行人以及车辆驾驶人员提供良好的视觉环境,保障交通安全,提高交通的运输效率,利民生活,而路面光照度是评测道路照明设施的照明质量的主要提现,因此路面光照度快速、准确的测量显得至关重要。
目前,传统的路面光照度测量采用四点法以及中心法的方式,不仅布点繁琐麻烦,且要人工点对点去测量计算,效率低误差大,而城市道路交通压力大,这种测量方法的工作量大,占用道路时间过长,影响交通运输,虽然现有技术中也出现了车载式照度检测设备,大大提高了测量的效率以及安全性,但是目前的车载式照度检测设备采用间隔相同时间采集数据,从而在使用过程中对测量车辆的行驶速度要求苛刻,目前的城市道路车流量大,且到处都是红绿灯,测试车辆的行驶速度必然忽快忽慢,甚至停止等红灯,因此目前的道路光照度测试方法容易受到道路实际环境限制,所测数据无法准确的反映真实路面照度。
因此,有必要提供一种车载式道路光照度采集方法解决上述技术问题。
发明内容
本发明提供一种车载式道路光照度采集方法,解决了现有的道路光照度采集方容易受到道路车实际环境限制,使得在测试时工作量大,占用道路时间过长,最终导致所测数据无法准确的反映真实路面照度的问题。
为解决上述技术问题,本发明提供的车载式道路光照度采集方法,包括以下操作步骤:
S1、将配备测试设备的测试车辆停放在待测路段的起始位置;
S2、准备测试前,将设备上电后,等待初始化完成,各个模块开始工作时,通过服务器设置设备现场参数初始化设置;
S3、当电源模块工作后,ARM处理器首先从获取GPS模块获取测试起始位置以及此位置光照度采集单元数据,打包保存在Flash存储器中,以及将此位置作为惯性导航模块的起始位置;
S4、测试车辆进入行驶状态进行测试时,利用惯导模块内三轴加速度传感器采集设备加速度,经过频域积分或时域积分得到相对测试设备起始位置的位移△S;
S5、ARM处理器实时采集S4中惯导模块得到的数据△S,与设定的参考位移S作比较,当△S=S时,此时ARM处理器发送采集信号,采集GPS模块的位置信息,以及此位置光照采集单元采集的光照度值,并打包保存在Flash存储器中,同时将此时位置信息设置为惯导模块下一段位移起始位置,最后将△S清零;
S6、ARM处理器将S5中打包的数据通过无线或者有线的方式传输到服务器处理显示。
优选的,所述S2中设备现场参数包括采集密度、车道数、灯杆高度和灯杆间距等,需根据实际的道路情况调整。
优选的,所述S3中通过GPS模块的定位功能,并借助电子地图信息的支持,提供准备的位置信息,以及为惯导模块测量采集间距提供起始位置信息。
优选的,用于所述S1中进行测试的测试设备,所述测试设备包括防护箱,所述防护箱的内部设置有测试机本体,所述防护箱的内部设置有调节结构,所述调节结构包括微型电机、转动杆和两个螺纹转轴,所述转动杆的外表面与所述微型电机的输出端均固定连接有转动齿轮,两个所述转动齿轮的外部相互啮合,所述螺纹转轴的外表面与所述转动杆的两端均固定连接有锥形齿轮,两个所述锥形齿轮的外部相互啮合。
优选的,所述防护箱内壁的两侧均连通有移动槽,所述防护箱的内部开设有装置槽,所述防护箱内部的两侧均开设有转动槽,所述螺纹转轴的顶端与所述移动槽内表面的顶部转动连接,所述螺纹转轴的底端贯穿所述防护箱的内部并延伸至所述转动槽的内部。
优选的,所述微型电机设置在所述装置槽的内部,所述转动杆的外部与所述防护箱的内部转动连接,所述测试机本体的两侧分别与两个所述螺纹转轴的外部螺纹连接。
优选的,所述防护箱底部的两侧均设置有缓冲结构,所述缓冲结构包括连接柱,所述连接柱的外部套接有支撑座,所述连接柱的外部且位于所述支撑座的顶部套接有支撑弹簧,所述支撑座的底部设置有防护垫。
优选的,所述防护箱底部的两侧均开设有活动槽,所述连接柱的顶端与所述活动槽内表面的顶部固定连接,所述支撑座的外部与所述活动槽的内部滑动连接。
优选的,所述防护箱的两侧均滑动连接有支撑柱,所述支撑柱的底端固定连接有安装件。
与相关技术相比较,本发明提供的车载式道路光照度采集方法具有如下有益效果:
本发明提供一种车载式道路光照度采集方法,该采集方法主要通过GPS模块定位功能,并借助电子地图信息的支持,提供准备的位置信息,以及为惯导模块测量采集间距提供起始位置信息,通过惯导模块测算出车辆实际位移△S,并同时预设的位移S比较,若两者相等时,则启动光照度采集单元,使其开始采集实时的道路光照度值,并传送给ARM处理器进行处理,使得车载式道路光照度采集设备可以根据测试设备移动的位移来采集数据,相较于传统的四点法、中心法或是间隔相同的时间采集方式,在测试过程中,不会受到道路车流量、红绿灯以及车速等外部因素影响,以相同位移值作为测量指标,实现等间距采集路面光照度,使得采集工作量大大减少,实际的操作难度降低,并有效的提升工作效率,最终使得所采集的数据可靠性强,更好的帮助工作人员对道路的光照度进行精准的数据采集。
附图说明
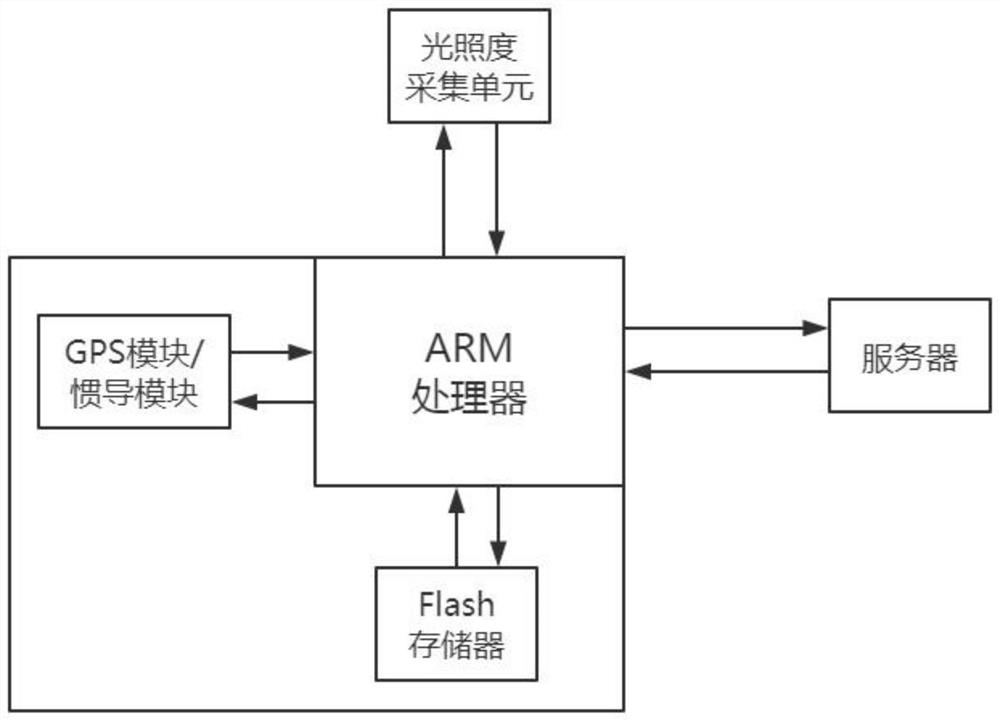
图1为本发明提供的车载式道路光照度采集方法采用的系统框图;
图2为本发明提供的车载式道路光照度采集方法实际采集过程的示意图;
图3为本发明中测试设备和测试车辆的结构示意图;
图4为图3所示的测试设备内部的结构示意图;
图5为图3所示的A部放大示意图。
图中标号:1、防护箱,2、测试机本体,3、调节结构,31、微型电机,32、转动杆,33、螺纹转轴,34、转动齿轮,35、锥形齿轮,4、移动槽,5、装置槽,6、转动槽,7、缓冲结构,71、连接柱,72、支撑座,73、支撑弹簧,74、防护垫,8、活动槽,9、支撑柱,10、安装件。
具体实施方式
下面结合附图和实施方式对本发明作进一步说明。
请结合参阅图1、图2、图3、图4和图5,其中,图1为本发明提供的车载式道路光照度采集方法采用的系统框图;图2为本发明提供的车载式道路光照度采集方法实际采集过程的示意图;图3为本发明中测试设备和测试车辆的结构示意图;图4为图3所示的测试设备内部的结构示意图;图5为图3所示的A部放大示意图。车载式道路光照度采集方法,包括以下操作步骤:
S1、将配备测试设备的测试车辆停放在待测路段的起始位置;
S2、准备测试前,将设备上电后,等待初始化完成,各个模块开始工作时,通过服务器设置设备现场参数初始化设置;
S3、当电源模块工作后,ARM处理器首先从获取GPS模块获取测试起始位置以及此位置光照度采集单元数据,打包保存在Flash存储器中,以及将此位置作为惯性导航模块的起始位置;
S4、测试车辆进入行驶状态进行测试时,利用惯导模块内三轴加速度传感器采集设备加速度,经过频域积分或时域积分得到相对测试设备起始位置的位移△S;
S5、ARM处理器实时采集S4中惯导模块得到的数据△S,与设定的参考位移S作比较,当△S=S时,此时ARM处理器发送采集信号,采集GPS模块的位置信息,以及此位置光照采集单元采集的光照度值,并打包保存在Flash存储器中,同时将此时位置信息设置为惯导模块下一段位移起始位置,最后将△S清零;
S6、ARM处理器将S5中打包的数据通过无线或者有线的方式传输到服务器处理显示。
所述S2中设备现场参数包括采集密度、车道数、灯杆高度和灯杆间距等,需根据实际的道路情况调整。
所述S3中通过GPS模块的定位功能,并借助电子地图信息的支持,提供准备的位置信息,以及为惯导模块测量采集间距提供起始位置信息。
用于所述S1中进行测试的测试设备,所述测试设备包括防护箱1,所述防护箱1的内部设置有测试机本体2,所述防护箱1的内部设置有调节结构3,所述调节结构3包括微型电机31、转动杆32和两个螺纹转轴33,所述转动杆32的外表面与所述微型电机31的输出端均固定连接有转动齿轮34,两个所述转动齿轮34的外部相互啮合,所述螺纹转轴33的外表面与所述转动杆32的两端均固定连接有锥形齿轮35,两个所述锥形齿轮35的外部相互啮合。
所述防护箱1内壁的两侧均连通有移动槽4,所述防护箱1的内部开设有装置槽5,所述防护箱1内部的两侧均开设有转动槽6,所述螺纹转轴33的顶端与所述移动槽4内表面的顶部转动连接,所述螺纹转轴33的底端贯穿所述防护箱1的内部并延伸至所述转动槽6的内部。
所述微型电机31设置在所述装置槽5的内部,所述转动杆32的外部与所述防护箱1的内部转动连接,所述测试机本体2的两侧分别与两个所述螺纹转轴33的外部螺纹连接。
防护箱1安装在测试测量的车顶位置,测试机本体2可以在防护箱1内部竖直方向上伸缩,微型电机31外接有电源,为正反转电机,通过外部的开关控制其运转,转动杆32位于防护箱1内部的底部位置,可以在防护箱1的内部转动,两个螺纹转轴33分别位于防护箱1内部的左右两侧,通过两个转动齿轮34啮合,使得微型电机31转动时可以带动转动杆32转动,两个锥形齿轮35适配设置,通过两个锥形齿轮35转动,可以使得两个螺纹转轴33转动,通过设置调节结构3,主要用于对测试机本体2的高度进行调节,在需要调节时,通过启动微型电机31,使得两个转动齿轮34可以转动,进而使得转动杆32可以转动,进而使得锥形齿轮35可以联动,通过锥形齿轮35转动,可以带动螺纹转轴33转动,最终使得测试机本体2可以在竖直方向上移动,实现测试机本体2的位置调节,能够实际的使用需求对其位置进行调节,在不需要使用时可以将其调节至最低状态,使其完全收缩至防护箱1内部,通过防护箱1对其起到防护效果,避免外部因素对其造成损伤,该调节结构3能够实现测试机本体2的高度调节,以满足人们不同的使用需求,使得测试机本体2在使用时更加灵活。
所述防护箱1底部的两侧均设置有缓冲结构7,所述缓冲结构7包括连接柱71,所述连接柱71的外部套接有支撑座72,所述连接柱71的外部且位于所述支撑座72的顶部套接有支撑弹簧73,所述支撑座72的底部设置有防护垫74。
所述防护箱1底部的两侧均开设有活动槽8,所述连接柱71的顶端与所述活动槽8内表面的顶部固定连接,所述支撑座72的外部与所述活动槽8的内部滑动连接。
缓冲结构7共设置有四个,分别位于支撑座72底部的左右两侧,在支撑座72的内部设置有与连接柱71适配的槽,使得连接柱71能够向支撑座72的内部延伸,支撑弹簧73为连接柱71提供弹力支持,防护垫74为防护垫74,在支撑座72的底部与车顶接触时,起到隔离防护作用,避免两侧直接接触,造成相互磨损,通过设置缓冲结构7,主要为防护箱1提供缓冲减震作用,在车辆行驶,通过连接柱71向支撑座72内部延伸,并同时挤压支撑弹簧73收缩,对车辆行驶时产生的震动进行消减,进而使得防护箱1以及内部的测试机本体2能够保持稳定状态,避免长时间处于震动环境中对其造成损伤,影响测试机本体2正常使用。
所述防护箱1的两侧均滑动连接有支撑柱9,所述支撑柱9的底端固定连接有安装件10。
支撑柱9共设置有四个,且分别位于防护箱1的左右两侧,与防护箱1的左右两侧滑动连接,对防护箱1起到限位作用,安装件10上设置有固定螺丝,与车顶螺纹连接,使得防护箱1能够稳定的安装在车顶上。
本发明提供的车载式道路光照度采集方法的工作原理如下:
S1、将配备测试设备的测试车辆停放在待测路段的起始位置;
S2、准备测试前,将设备上电后,等待初始化完成,各个模块开始工作时,通过服务器设置设备现场参数初始化设置;
S3、当电源模块工作后,ARM处理器首先从获取GPS模块获取测试起始位置以及此位置光照度采集单元数据,打包保存在Flash存储器中,以及将此位置作为惯性导航模块的起始位置;
S4、测试车辆进入行驶状态进行测试时,利用惯导模块内三轴加速度传感器采集设备加速度,经过频域积分或时域积分得到相对测试设备起始位置的位移△S;
S5、ARM处理器实时采集S4中惯导模块得到的数据△S,与设定的参考位移S作比较,当△S=S时,此时ARM处理器发送采集信号,采集GPS模块的位置信息,以及此位置光照采集单元采集的光照度值,并打包保存在Flash存储器中,同时将此时位置信息设置为惯导模块下一段位移起始位置,最后将△S清零;
S6、ARM处理器将S5中打包的数据通过无线或者有线的方式传输到服务器处理显示。
与相关技术相比较,本发明提供的车载式道路光照度采集方法具有如下有益效果:
该采集方法主要通过GPS模块定位功能,并借助电子地图信息的支持,提供准备的位置信息,以及为惯导模块测量采集间距提供起始位置信息,通过惯导模块测算出车辆实际位移△S,并同时预设的位移S比较,若两者相等时,则启动光照度采集单元,使其开始采集实时的道路光照度值,并传送给ARM处理器进行处理,使得车载式道路光照度采集设备可以根据测试设备移动的位移来采集数据,相较于传统的四点法、中心法或是间隔相同的时间采集方式,在测试过程中,不会受到道路车流量、红绿灯以及车速等外部因素影响,以相同位移值作为测量指标,实现等间距采集路面光照度,使得采集工作量大大减少,实际的操作难度降低,并有效的提升工作效率,最终使得所采集的数据可靠性强,更好的帮助工作人员对道路的光照度进行精准的数据采集。
以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本发明的专利保护范围内。
- 一种车载式道路光照度采集方法
- 一种空间频域成像中复杂组织体表面光照度的采集方法