水下机器人智能交互和服务系统
文献发布时间:2023-06-19 10:48:02
技术领域
本发明涉及智能机器人技术领域,尤其涉及一种水下机器人智能交互和服务系统。
背景技术
以智能机器人为代表的三元工具,是人类工具的最高形态。智能机器人是对信息的充分挖掘和利用,是具备犹如人类复杂意识般的真正意义的三元工具。随着海洋强国和人工智能等国家战略的提出和实施,水下机器人,面临越来越高的智能化需求。
目前的水下机器人,虽然已经具备一定的智能化水平,但仍与人们的期望有很大差距。尤其是在智能交互和服务方面,传统的水下机器人系统,缺乏完善的用户交互和服务系统,存在交互方式单一、大量机械性人工操作、用户获取信息量少、缺乏配套服务等缺点,已经无法充分满足用户的体验需求。而随着智能手机、智能家居等智能产品和服务的推广,人们在智能交互和服务等方面的需求正日益提高。
传统的水下机器人研究者,在设计方法方面,侧重于传统的工业设计方法,忽视用户体验设计方法;在用户与水下机器人关系方面,把用户看做单纯的控制者,把水下机器人看做单纯的自动工具,忽视用户服务与体验;在结构方面,侧重于水下机器人的水下本体结构,忽视用户控制器、服务器等与用户相关的结构;在功能方面,侧重于水下机器人自身的运动控制、图像处理等技术性功能,忽视用户交互、用户服务等与用户相关的服务性功能;在智能化方面,侧重于路径规划、故障诊断等智能控制,忽视智能交互、智能服务等与用户相关的智能化。
申请公布号为CN105564617A、CN106043631A和CN106143842A的发明专利,分别公开了一种水下机器人,都主要针对水下机器人的水下本体结构。申请公布号为CN105843248A的发明专利,公开了一种水下机器人,其中的用户操作系统只是作为用户的简单控制工具。申请公布号为CN105643626A、CN105676867A和CN105890589A的发明专利,分别公开了一种用于水下机器人的方法,都属于水下机器人自身的控制方法。这些专利文献,都没有涉及与智能交互或服务相关的内容。
发明内容
本发明的目的在于提供一种水下机器人智能交互和服务系统,提高水下机器人用户的交互体验,并按需向水下机器人用户提供个性化的智能服务,从而向水下机器人用户提供更加智能的产品和更加方便快捷人性化的服务体验。
本发明的目的通过以下技术方案予以实现:
一种水下机器人智能交互和服务系统,包括交互子系统和服务子系统等2个子系统;所述的交互子系统,实现水下机器人用户与水下机器人的智能交互;所述的服务子系统,按需向水下机器人用户提供个性化的智能服务;
所述的智能交互和服务系统,具有交互模式、服务模式和综合模式3种工作模式;所述的交互模式,由交互子系统独立实现智能交互功能;所述的服务模式,由服务子系统独立实现智能服务功能;所述的综合模式,由交互子系统和服务子系统共同完成智能交互和服务功能;
所述智能交互和服务系统,包括控制即服务、方案即服务、软件即服务、平台即服务、设施即服务5种服务模式,向水下机器人用户提供服务;所述的控制即服务,向水下机器人用户提供符合用户体验的控制系统和方法;所述的方案即服务,分析水下机器人用户的个性化需求,提供满足用户需求的个性化解决方案;所述的软件即服务,向水下机器人用户提供智能化的用户软件;所述的平台即服务,向水下机器人用户提供智能化的用户平台;所述的设施即服务,向水下机器人用户提供智能化的设施。
进一步地,所述的交互子系统,包括硬件支持层、软件支持层、用户交互层、系统交互层、交互管理层5个系统层;所述硬件支持层、软件支持层和用户交互层,是水下机器人用户直接参与的系统层;所述的系统交互层和交互管理层,无需水下机器人用户参与;所述的硬件支持层,向水下机器人用户提供满足用户需求的交互硬件;所述的软件支持层,向水下机器人用户提供满足用户需求的交互软件;所述的用户交互层,实现水下机器人用户与水下机器人之间的信息交互;所述的系统交互层,实现水下机器人内部的信息交互;所述的交互管理层,实现对交互子系统的智能管理;
进一步地,硬件支持层包括硬件方案模块、硬件识别模块、硬件管理模块、用户硬件模块;所述的硬件方案模块,向不同的交互硬件提供解决方案,从而允许水下机器人用户选择不同的交互硬件;向不同的水下机器人提供适配方案,从而使交互子系统能够适合于不同的水下机器人;所述的硬件识别模块,根据硬件方案模块,识别和支持不同的硬件,同时,识别和处理与硬件相关的各种异常;所述的硬件管理模块,在没有用户参与的情况下,进行自动硬件管理,同时,帮助水下机器人用户进行人为硬件管理;所述的用户硬件模块,支持水下机器人用户使用自定义的用户硬件,同时,在硬件允许的情况下,支持水下机器人用户对硬件进行各方面的自定义配置。
进一步地,软件支持层包括操作系统模块、安全软件模块、交互软件模块、软件管理模块、用户软件模块;所述的操作系统模块,使交互子系统能够适应不同的操作系统,同时,尽可能智能地解决可能由操作系统引发的冲突;所述的安全软件模块,向水下机器人用户提供信息安全保障,同时,尽可能智能地解决可能由外部安全软件引发的冲突;所述的交互软件模块,按需向水下机器人用户提供个性化交互软件,同时,提供各类软件帮助;所述的软件管理模块,在没有用户参与的情况下,进行自动软件管理,同时,在软件支持的情况下,帮助用户进行软件件管理;所述的用户软件模块,支持用户使用自定义的用户软件,同时,在软件支持的情况下,支持用户对软件进行各方面的自定义配置。
进一步地,用户交互层包括信息安全模块、信息输入模块、信息输出模块和信息处理模块等;其中,所述的信息安全模块,识别和处理各类信息异常,保障信息在存储传输等过程中的安心;所述的信息输入模块,获取用户的输入信息,识别和处理各类输入异常;所述的信息输出模块,向用户输出信息,并通过用户反馈,确认输出结果正常;信息处理模块,对用户交互的输入输出信息进行处理,同时与信息交互层进行协作。
进一步地,系统交互层包括信息通信模块、信息识别模块、信息解释模块;所述的信息通信模块,与用户交互层进行协作,同时,实现交互子系统与水下机器人其它系统的通信;所述的信息识别模块,对来自水下机器人其它系统的信息进行处理,识别出有价值的信息,识别和处理异常信息;所述的信息解释模块,在水下机器人其它系统可理解的信息与用户可理解的信息之间进行相互解释。
进一步地,交互管理层,包括交互系统知识库、交互系统推理机、交互系统感知器和交互系统执行器,通过感知器、推理机、执行器的推理结构,对交互子系统进行管理;所述的交互系统知识库,存储用于交互系统推理机的各类事实和规则;所述的交互系统推理机,进行与交互相关的推理,包括以技术中心的推理和以用户为中心的推理;所述的交互系统感知器,感知各类交互软硬件的状态信息,感知交互过程中的各类信息;所述的交互系统执行器,根据交互系统推理级的推理结果,进行软硬件管理,或控制交互过程。
进一步地,服务子系统包括控制服务层、解决方案层、软件服务层、平台服务层、设施服务层和服务管理层;所述的控制服务层、解决方案层、软件服务层、平台服务层、设施服务层,分别对应控制即服务、方案即服务、软件即服务、平台即服务、设施即服务5种服务模式;所述的服务管理层,实现对服务子系统的智能管理;
所述解决方案层包括用户接口模块、需求分析模块、方案生成模块、开发接口模块、方案支持模块;所述的用户接口模块,通过交互获取水下机器人用户的体验需求,并传输给需求分析模块,同时,把方案生成模块提供的解决方案,提供给水下机器人用户;所述的需求分析模块,根据来自用户接口模块的用户体验需求,进行需求分析,并把分析结果传输给方案生成模块和开发接口模块;方案生成模块,根据来自需求分析模块的分析结果和存储于方案支持模块的生成方法,生成适合于水下机器人用户的解决方案,并传输给用户接口模块;开发接口模块,是为开发人员保留的开发接口,向开发人员提供反馈信息,并允许开发人员进行开发;方案支持模块,存储各类用于生成解决方案的生成方法;
所述软件服务层包括交互软件、美化软件、教学软件、媒体软件;所述的交互软件,实现用户与水下机器人的交互,并且,在用户许可的前提下,主动向用户进行智能交互,满足用户的交互需求;所述的美化软件,提供皮肤主题、布局调整界面美化功能,满足用户的美化要求;所述的教学软件,向用户提供操纵教学功能,满足用户的学习需求;所述的媒体软件,允许用户对来自水下机器人摄像系统、声呐系统的多媒体信息,进行多媒体处理,满足用户的后期媒体处理需求;
所述平台服务层包括开发平台、实验平台、协作平台、仿真平台;所述的开发平台,提供用户二次开发的平台,满足用户的自由定制、二次开发需求;所述的实验平台,提供算法实验、仿真实验的平台,满足用户的实验需求;所述的协作平台,提供多水下机器人协作的平台,满足用户的多机协作需求;所述的仿真平台,提供水下机器人的仿真环境,用于用户在真实使用前的仿真体验,或检验用户二次开发的软件;
所述设施服务层包括云服务器和各类可替代设施;所述的云服务器,是服务软件、服务平台的载体;所述的各类可替代设施,向用户提供更多的设施选择,满足用户的个性化需求;
所述服务管理层,包括用户体验设计模块、解决方案管理模块和服务资源管理模块;用户体验设计模块面向设计人员;设计人员通过用户体验设计模块,进行用户体验设计;解决方案管理模块针对解决方案层,对解决方案进行管理;服务资源管理模块,对用于软件服务、平台服务、设施服务的各类资源进行管理。
与现有技术相比,本发明的有益效果是:
从用户角度出发,提出面向水下机器人用户的智能交互和服务系统。从交互硬件、交互软件、交互过程等方面,提高了水下机器人的智能交互水平。从控制即服务、方案即服务、软件即服务、平台即服务和设施即服务等方面,提高了水下机器人的智能服务水平。在一定程度上改善了传统水下机器人在用户交互和服务方面的缺点,向用户提供更加智能的产品和更加方便快捷人性化的服务体验。
附图说明
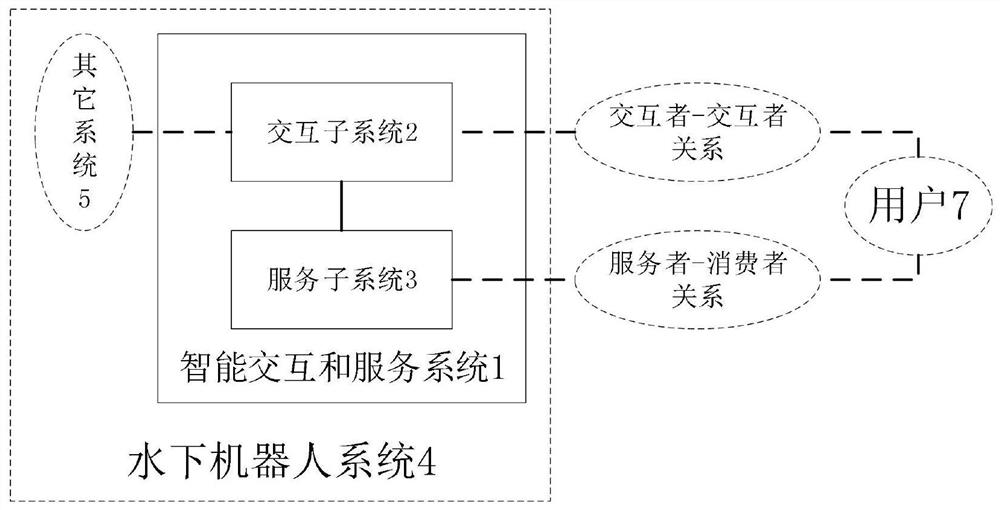
图1是本发明实施例的智能交互和服务系统示意图;
图2是本发明实施例的智能交互和服务系统工作模式示意图;
图3是本发明实施例的交互子系统示意图;
图4是本发明实施例的硬件支持层示意图;
图5是本发明实施例的软件支持层示意图;
图6是本发明实施例的用户交互层示意图;
图7是本发明实施例的系统交互层示意图;
图8是本发明实施例的交互管理层示意图;
图9是本发明实施例的服务子系统示意图;
图10是本发明实施例的解决方案层示意图;
图11是本发明实施例的软件服务层示意图;
图12是本发明实施例的平台服务层示意图;
图13是本发明实施例的设施服务层示意图;
图14是本发明实施例的服务管理层示意图。
具体实施方式
下面结合附图和具体实施例对本发明作进一步说明。
如图1所示,在本发明的实施例中,智能交互和服务系统1,是水下机器人系统4中与用户直接相关的部分,包括交互子系统2和服务子系统3。智能交互和服务子系统1和其它系统5,共同组成了完整的水下机器人系统4。交互子系统2与用户7,是交互者与交互者的平等关系。服务子系统3与用户7,是服务者与消费者的服务关系。智能交互和服务系统1,通过交互子系统2与用户7进行平等的信息交互,通过服务子系统3按需向用户7提供服务。
如图2所示,在本发明的实施例中,智能交互和服务系统具备交互模式81、服务模式82和综合模式83等3种工作模式。在交互模式81中,只包含交互子系统2。在服务模式82中,只包含服务子系统3。在综合模式83中,同时包含交互子系统2和服务子系统3。
如图3所示,在本发明的实施例中,交互子系统2,包括硬件支持层21、软件支持层22、用户交互层23、系统交互层24和交互管理层25等。硬件支持层21,向用户7提供交互硬件支持。软件支持层22,向用户7提供交互软件支持。用户交互层23,在硬件支持层21和软件支持层22的支持下,实现用户7与交互子系统2的交互过程。系统交互层24,实现交互子系统2和服务子系统3、其它系统5之间的信息交互。交互管理层25,实现对交互子系统2的智能管理。
如图4所示,在本发明的实施例中,硬件支持层21,包括硬件方案模块211、硬件识别模块212、硬件管理模块213、用户硬件管理模块214等。硬件方案模块211,提供针对不同交互硬件的解决方案和针对不同水下机器人的适配方案,从而使交互子系统2能够支持不同的交互硬件和水下机器人。硬件识别模块212,能够识别和支持不同硬件,如用户使用的外部显示器;能够识别和处理硬件异常,如明显的按键失灵。硬件管理模块213,能够实现自动硬件管理,如硬件驱动的自动更新;能够实现用户的人为硬件管理,如用户强制使用独立显卡。用户硬件模块214,支持用户使用自定义硬件,如由用户提供的键盘鼠标;支持用户对硬件的自定义配置,如对按键功能的用户自定义。
如图5所示,在本发明的实施例中,软件支持层22,包括操作系统模块221、安全软件模块222、交互软件模块223、软件管理模块224、用户软件模块225等。操作系统模块221,支持不同的操作系统,如Win7 32和Win 10 64位,并进行优化;识别和解决可能由操作系统引起的冲突,如操作系统自动更新引起的系统自动重启。安全软件模块222,提供信息安全保障,如对不同的用户设置不同的权限并进行权限审核;识别和解决可能由外部安全软件引起的冲突,如外部安全软件对文件访问权限和网络访问权限的限制。交互软件模块223,满足用户对交互软件的不同需求,如中英文语言;提供软件帮助,尤其是面向新用户的软件帮助。软件管理模块224,能够实现自动软件管理,如软件自动更新;能够支持用户的人为管理,如用户手动执行的软件更新。用户软件模块225,支持用户使用自定义软件;在软件许可的情况下,支持用户对软件的自定义配置,如主题皮肤等界面美化。
如图6所示,在本发明的实施例中,用户交互层23,包括信息安全模块231、信息输入模块232、信息输出模块233和信息处理模块234等。信息安全模块231,识别和处理信息异常,并保障信息在存储与传输过程中的安全。信息输入模块232,获取用户输入信息,识别和处理输入异常。信息输出模块,向用户输出信息,并通过用户反馈,确认输出结果正常。信息处理模块233,实现对用户交互信息的处理,同时,实现用户交互层23与系统交互层24的协作。
如图7所示,在本发明的实施例中,系统交互层24,包括信息通信模块241、信息识别模块242、信息解释模块243等。信息通信模块241,实现系统交互层24与用户交互层23的协作,同时,实现交互子系统2和服务子系统3、其它系统5的通信。信息识别模块242,从所有的通信信息中识别出有价值的信息,同时,识别和处理各类异常的信息。信息解释模块243,把来自其它系统的信息解释为用户可理解的信息,或者把来自用户的信息解释为其它系统可理解的信息。
如图8所示,在本发明的实施例中,交互管理层25,包括交互系统知识库251、交互系统推理机252、交互系统感知器253和交互系统执行器254等。交互系统感知器253,获取交互软件和交互硬件的状态信息,获取交互过程中的信息特征,并把获取的信息传递给交互系统推理机252。交互系统推理252,接收来自交互系统感知器253的信息,根据存储于交互系统知识库251的事实和规则,进行以技术为中心的推理和以用户为中心的推理,并把推理结果传递给交互系统执行器254。交互系统知识库251,存储用于交互系统推理机的各类事实和规则。交互系统执行器254,根据交互系统推理机252的推理结果,管理交互软件和交互硬件,或者控制交互过程。
如图9所示,在本发明的实施例中,服务子系统3,包括控制服务层31、解决方案层32、软件服务层33、平台服务层34、设施服务层35和服务管理层36等。在控制服务层31中,用户7和水下机器人,同时存在控制者与被控者之间的控制关系和消费者与服务者之间的服务关系。在解决方案层32、软件服务层33、平台服务层34、设施服务层35中,用户7和水下机器人的关系,以消费者与服务者之间的服务关系为主。
控制服务层31、解决方案层32、软件服务层33、平台服务层34、设施服务层35,分别实现服务子系统3的控制即服务、方案即服务、软件即服务、平台即服务、设施即服务等服务模式。服务管理层36,实现对服务子系统3的智能管理。
如图10所示,在本发明的实施例中,解决方案层32,包括用户接口模块321、需求分析模块322、方案生成模块323、方案支持模块324、开发接口模块325。用户71,通过计算机326访问用户接口模块321。用户72,通过手机327访问用户接口模块321。用户接口模块321,接收用户71和用户72的访问请求,并获取用户71和用户72的需求信息,把需求信息传递给需求分析模块322。需求分析模块322,根据来自用户接口321的需求信息,进行用户需求分析,把分析结果传递给方案生成模块323和开发接口模块325。方案生成模块323,接收来自需求分析模块322的分析结果,根据方案支持模块324的方案生成方法,生成针对用户71和用户72的用户服务解决方案,并把解决方案传递给用户接口321。用户接口模块321,接收来自方案生成模块323的解决方案,并分别提供给用户71和用户72。用户71和用户72,获取满足各自需求的解决方案。开发接口模块325,用于向开发人员73提供反馈信息,或者向开发人员73提供开发接口。方案支持模块324,存储用于生成解决方案的方法和相关信息。
如图11所示,在本发明的实施例中,软件服务层33,包括交互软件331、教学软件332、美化软件333和媒体软件334等。用户74,认为水下机器人太死板,具有主动交互的需求。用户75,不熟悉水下机器人的操纵,具有操纵教学的需求。用户76,认为界面不美观,并且想把水下录像进行美化后分享给好友,具有界面美化和媒体处理的需求。交互软件331,满足用户74的需求;教学软件332,满足用户75的需求。美化软件333和媒体软件334,满足用户76的需求。
如图12所示,在本发明的实施例中,平台服务层34,包括开发平台341、实验平台342、协作平台343、仿真平台344等。用户77,想进行水下机器人的二次开发。用户78,想验证某个水下机器人控制算法的控制效果。用户79,拥有两个水下机器人,并且想进行两个水下机器人的协作。用户710,作为儿童教师,想让儿童体验水下机器人,但担心儿童安全问题。开发平台341,满足用户77的二次开发需求。实验平台342,可以满足用户78的算法验证需求。协作平台343,可以满足用户79的协作需求。仿真平台344,可以满足用户710的儿童体验需求。
如图13所示,在本发明的实施例中,设施服务层35,包括云服务器351和各类可替代设施352等。可替代设施352,包括新样式操纵摇杆353、虚拟现实眼镜354、便携无线控制器355等。用户711,想建立私有的水下机器人云服务器。用户712,认为已有的操纵摇杆样式不美观,想更换样式。用户713,想在水下机器人中获得虚拟现实的体验。用户714,认为已有的控制器不利于携带,想更换为轻巧便携的控制器。云服务器351,能够满足用户711的私有云服务需求。新样式的操纵摇杆353,能够慢用用户712的样式需求。虚拟现实眼镜354,能够满足用户713的虚拟现实体验需求。便携无线控制器325,能够满足用户714的轻巧便携需求。
如图14所示,在本发明的实施例中,服务管理层36,包括用户体验设计模块361、解决方案管理模块362、服务资源管理模块363等。用户体验设计模块361,主要面向设计人员715。设计人员715,通过用户体验设计模块361,对服务子系统3进行用户体验设计。解决方案管理模块362,主要针对解决方案层32,对解决方案进行管理。服务资源管理模块363,对用于软件服务、平台服务、设施服务等服务的各类资源进行管理。
除上述实施例外,本发明还可以有其他实施方式,凡采用等同替换或等效变换形成的技术方案,均落在本发明要求的保护范围内。
- 水下机器人智能交互和服务系统
- 智能交互及心理慰藉机器人服务系统