一种水下淤泥厚度探测机器人及其系统
文献发布时间:2023-06-19 11:05:16
技术领域
本发明涉及水下淤泥探测设备技术领域,尤其涉及一种水下淤泥厚度探测机器人及其系统。
背景技术
目前淤泥探测技术都是在海洋、江河河道、人工湖等开阔水域内,由船或者无人船携带设备在水面航行执行探测,需要利用GPS定位导航。而对于建筑内水域、隧道内水域等非开阔水域,天线无法正常工作,无法利用GPS进行定位导航。另外,在现有技术中,由船或机器人携带多波束扫描系统,对水下淤泥进行扇形推进扫描,其扫描速度快,能输出3D淤泥表面地形效果图,但不能给出淤泥厚度和详细的淤泥分层结构图,即无法测量淤泥的厚度及其纵向分布情况。
特别是对于核电站取水泵房前池或泵房取水口等非开阔水域内,水的上表面离建筑物结构(如横梁)很近的情况下,无法保证有足够的空间使得船体携带天线浮在水面行进,同样导致导航定位无法执行。且核电站等非开阔水域设施复杂,具有距离长、水流速度快及海生物易生长等特点,需要定期停工清理海生物、沉沙及淤泥,由于淤泥厚度大时会影响水流量,核电水冷系统水流量不够,会影响冷却效果,容易出现冷却安全事故。但是目前没有能够长时间完成建筑内水域、隧道内水域、以及水域上表面离建筑物很近等情况下探测水下淤泥厚度的机器人设备,为水底淤泥清理工作提供决策依据。
发明内容
本发明的第一个目的在于提供一种水下淤泥厚度探测机器人,其旨在解决对建筑内水域、隧道内水域和水平面离建筑物结构较近的非开阔水域内对淤泥厚度及其结构进行探测的技术问题,还能有效解决人工水下操作受限制以及降低人员水下操作的安全风险。
本发明的第二个目的在于提供一种水下淤泥厚度探测系统,在非开阔水域内利用水下探测机器人与岸基平台通讯,探测水域内的淤泥的厚度及其纵向淤泥层结构分布情况,以便准确获取并评估淤泥结构可能对相关设备的安全运行带来的危害,为进一步清理淤泥提供决策依据。
为达到上述目的,本发明提供的方案是:
一种水下淤泥厚度探测机器人,用于非开阔水域内的水下淤泥厚度探测,所述机器人包括:
水下定位系统,用于对所述机器人进行实时水下定位;
浅地层剖面仪系统,用于探测水底淤泥的剖面结构,识别并获取不同分层结构相对于底床的深度;
推进器组件,用于控制所述机器人在水中的行进姿态的推进;
控制仓模块,用于实现所述机器人在水下工作状态的控制;
外壳,用于提供浮力和容置空间;
所述水下定位系统、所述浅地层剖面仪系统和所述推进器组件均与所述控制仓模块相连接;且所述水下定位系统、所述浅地层剖面仪系统、所述推进器组件和所述控制仓模块均设置于所述容置空间内。
进一步,所述水下定位系统包括惯性导航系统和辅助导航系统,所述惯性导航系统用于获取所述机器人在水下的实时速度、姿态、位置和航向的定位信息,所述辅助导航系统用于修正所述惯性导航系统的定位信息。
进一步,所述辅助导航系统包括多普勒计程仪、高精度压力传感器和表面声速传感器,所述多普勒计程仪用于对所述惯性导航系统的定位信息进行位置误差修正,所述高精度压力传感器用于对所述惯性导航系统的定位信息进行高度误差修正,所述表面声速传感器用于测量水中声速。
进一步,所述浅地层剖面仪系统包括控制单元和换能器阵列,所述控制单元设置在所述容置空间的密封舱内,所述换能器阵列设置于所述机器人的底部,且所述控制单元与所述换能器阵列相连接,所述换能器阵列用于发射并接收探测水下沉积物的声脉冲。
进一步,所述机器人还包括与所述控制仓模块相连接的可视系统,所述可视系统包括环扫声呐、摄像头和LED灯,所述环扫声呐设置于所述机器人的顶部,所述摄像头和LED灯对应设置于所述机器人的一侧。
进一步,所述控制仓模块内设有安全监测组件,所述安全监测组件包括温度传感器、湿度传感器和压力传感器,所述安全监测组件用于实时监测所述控制仓模块的工作环境。
进一步,所述机器人还包括与所述控制仓模块相连接的供电仓,所述供电仓包括电源系统和电池组,所述电源系统用于与岸基平台相连接并为所述机器人的工作供电,所述电池组用于当所述电源系统断供时继续为所述机器人供电。
进一步,所述外壳包括浮力上壳和框架下壳,所述浮力上壳和所述框架下壳围合形成所述容置空间。
进一步,所述浮力上壳顶部的四周开设有安装孔,且所述安装孔从所述浮力上壳的顶部至侧边倾斜式设置,所述安装孔用于容纳所述推进器组件。
进一步,所述推进器组件包括若干个第一推进器和第二推进器,所述第一推进器用于控制所述机器人在竖直方向的推进,所述第二推进器用于控制所述机器人在水平方向的推进,且所述第一推进器设置于所述安装孔内,所述第二推进器设置于所述框架下壳的四周。
再进一步,所述机器人的顶部设置有吊装挂钩,所述吊装挂钩用于将所述机器人吊装下水或回收。
一种水下淤泥厚度探测系统,所述探测系统包括岸基平台和上述任一种所述的机器人,所述岸基平台与所述机器人通过脐带缆连接实现供电和信息传输。
本申请的优势在于,在非开阔水域内利用水下探测机器人与岸基平台通讯,机器人通过惯性导航系统定位导航,在推进器的控制下实现水下姿态、速度和方向调整,可按照预设的走航方式移动,再利用浅地层剖面仪系统探测扫描水底淤泥厚度,以便获取并评估淤泥结构可能对相关设备的安全运行带来的危害,为进一步清理淤泥提供决策依据。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图示出的结构获得其他的附图。
图1是实施例中提供的一种水下淤泥厚度探测机器人的结构示意图;
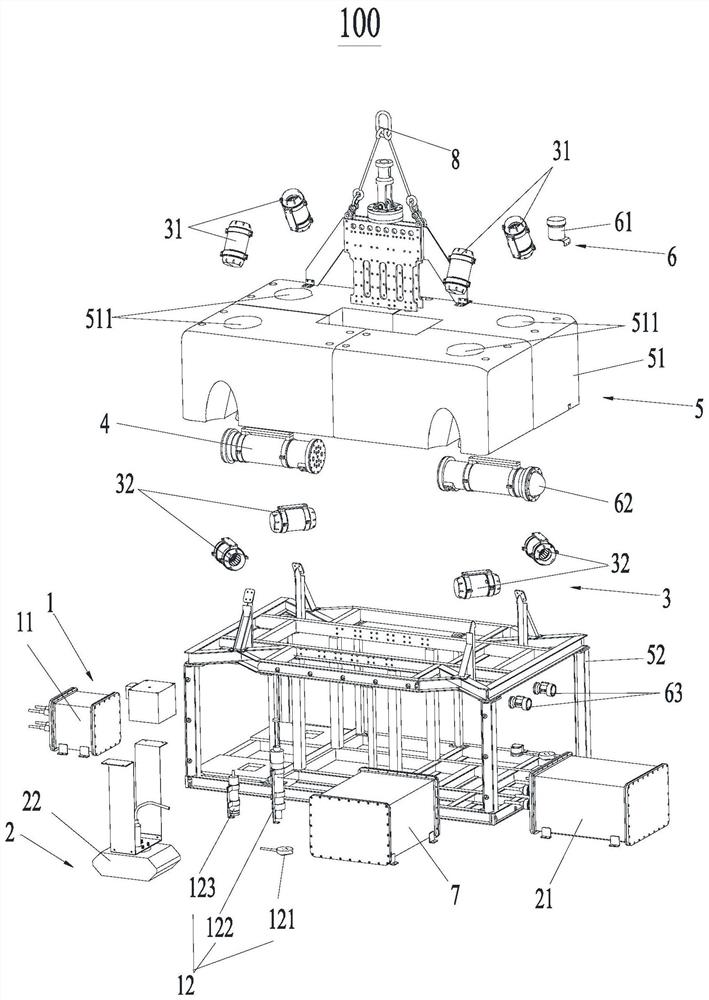
图2是图1的爆炸图。
附图标记:
100-机器人;
1-水下定位系统;11-惯性导航系统;12-辅助导航系统;121-多普勒计程仪;122-高精度压力传感器;123-表面声速传感器;
2-浅地层剖面仪系统;21-控制单元21;22-换能器阵列;
3-推进器组件;31-第一推进器;32-第二推进器;
4-控制仓模块;
5-外壳;51-浮力上壳;511-安装孔;52-框架下壳;
6-可视系统;61-环扫声呐;62-摄像头;63-LED灯;
7-供电仓;
8-吊装挂钩。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
需要说明,本发明实施例中所有方向性指示(诸如上、下、左、右、前、后……)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
还需要说明的是,当元件被称为“固定于”或“设置于”另一个元件上时,它可以直接在另一个元件上或者可能同时存在居中元件。当一个元件被称为是“连接”另一个元件,它可以是直接连接另一个元件或者可能同时存在居中元件。
另外,在本发明中涉及“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。
如图1-2所示,本发明实施例提供的一种水下淤泥厚度探测机器人100,主要是用于对建筑内水域、隧道内水域和水平面离建筑物结构(如横梁)较近的非开阔水域内的水下淤泥厚度探测,该机器人100包括:
水下定位系统1,用于对机器人进行实时水下定位;
浅地层剖面仪系统2,用于探测水底淤泥的剖面结构,识别并获取不同分层结构相对于底床的深度;
推进器组件3,用于控制机器人在水中的行进姿态的推进;
控制仓模块4,用于实现机器人在水下工作状态的控制;
外壳5,用于提供浮力和容置空间;
水下定位系统1、浅地层剖面仪系统2和推进器组件3均与控制仓模块4相连接,以实现信息的传输和工作状态的控制;且水下定位系统1、浅地层剖面仪系统2、推进器组件3和控制仓模块4均设置于容置空间内。
在本实施例中,水下定位系统1包括惯性导航系统11和辅助导航系统12,惯性导航系统11为光纤惯性导航系统装载于防水密封舱内,能适用于工作环境具有辐射性和磁场干扰状况,惯性导航系统11可根据人工或自动(卫星信号有效时)装订的起始点位置、经度、纬度、高度,获得机器人100的实时速度、位置、姿态和航向等数据信息。
在本实施例中,惯性导航系统11为自主导航系统,为了防止自主导航随时间增长而出现误差发散现象,利用辅助导航系统12的数据对自主导航系统进行修正,辅助导航系统12包括多普勒计程仪121、高精度压力传感器122和表面声速传感器123。多普勒计程仪121是一种测量相对于水底速度的声呐设备,用来测量机器人在水中运动速度和航程的水声导航设备,适合于水下探测机器人100的精确导航和定位,用于对惯性导航系统11的定位信息进行位置误差修正;高精度压力传感器122可采用MiniIPS进行水深度测量,用于对惯性导航系统的定位信息进行高度误差修正;表面声速传感器123用于测量水中声速。
在本实施例中,浅地层剖面仪系统2可采用具有出色的穿透能力,还可提供高分辨率地层分层图像的全频谱宽带调频(FM)浅地层剖面仪,其包括控制单元21和换能器阵列22,控制单元21设置于防水的密封舱内,换能器阵列22设置于机器人的底部且正对水底,控制单元21与换能器阵列22相连接,换能器阵列用于发射声脉冲,并接收探测水下沉积物的反射回声脉冲。浅地层剖面仪系统2利用声波在水下地层中的传播和反射特性来探明水底地层构造状况,对水下地层或目标物发射声脉冲,利用声脉冲传播时所遇界面声阻抗不同的规律,通过换能器阵列22接收记录反射回来的部分,经过处理形成波形图,输出为能够反映地层声学特征的浅地层声学记录剖面,既可用于标准的浅地层剖面分层,还可测量掩埋管线的定位及埋深,穿透剖面深度最大可达20米,垂直分辨率可达厘米级别。
在本实施例中,为避免机器人100在行进过程中碰到设备或障碍物,如核电站前池细格栅、粗格珊和前池池壁,该机器人100还包括与控制仓模块4相连接的可视系统6。可视系统包括环扫声呐61、摄像头62和LED灯63,环扫声呐61设置于机器人100的顶部,摄像头和LED灯对应设置于机器人的一侧。针对较为混浊的水质,在水下直接靠摄像头62和高流明的LED灯63无法做到远距离可视,选用Ping360环扫声呐测距,保证了在混浊水中的可视距最高可达到50米,运用声频“镜头”在昏暗的浑浊水体中生成几乎等同影像质量图像的高清晰度声呐。考虑到水下低照度情形,配置摄像头62和两个大流明LED灯63,通过与机器人100相连接的岸基平台(图未示),可实时监测机器人100与设备或障碍物的相对距离,保障机器人100工作的安全距离。
在本实施例中,控制仓模块4内设有安全监测组件(图未示),安全监测组件包括温度传感器(图未示)、湿度传感器(图未示)和压力传感器(图未示),温度传感器用于实时监测控制舱内工作温度、湿度传感器用于实时监测控制舱内的湿度、压力传感器用于实时监测机器人工作的水深度,安全监测组件实时监测控制仓模块4的工作环境,保证机器人100在安全的环境中工作。
在本实施例中,机器人还包括与控制仓模块4相连接的供电仓7,供电仓7包括电源系统(图未示)和电池组(图未示),电源系统可通过脐带缆与岸基平台相连接供电,在电源系统中经过降压处理为机器人100内所需的各级低压直流电,保证机器人连续不间断工作;电池组作为备用电池能在外供电掉电的情况下,保证机器人100与岸基平台的正常通信,并维持机器人100继续稳定安全的悬浮回归到水面。
在本实施例中,外壳5包括浮力上壳51和框架下壳52,浮力上壳51和框架下壳52相扣合且围合形成容置空间。浮力上壳51采用浮力材料制备为机器人100在水中提供浮力,浮力上壳51和框架下壳52组成开架式结构,机器人100内部的水下定位系统1、浅地层剖面仪系统2、控制仓模块等可搭载在框架下壳52中,结构简单,利于各个模块的设计和安装。
在本实施例中,推进器组件3包括四个第一推进器31和四个第二推进器32,第一推进器用于控制机器人在竖直方向的推进,第二推进器用于控制机器人在水平方向的推进,通过八个推进器可精准控制机器人100完成上浮、下潜、前进、后退、平移、旋转等动作姿态的调整。具体的,浮力上壳51顶部的四周开设有安装孔511,且安装孔511从浮力上壳51的顶部至侧边倾斜式设置,四个第一推进器31分别设置与四个安装孔51内,四个第二推进器32分别设置于框架下壳52顶部的四周,且第二推进器32呈两两中心对称式设置。
在本实施例中,机器人100的顶部设置有吊装挂钩8,吊装挂钩8用于将机器人100吊装下水至目标位置或回收。
一种水下淤泥厚度探测系统,探测系统包括岸基平台和上述实施例中任一种的机器人100,岸基平台与机器人100通过脐带缆连接实现供电和信息传输。机器人100按照预设的航线航行,对水域内进行水底淤泥厚度及其结构进行探测,可通过岸基平台实时监测机器人100在水下的状态,岸基平台通过对机器人100所获取的数据进行后期处理后,即可得出完整的水底淤泥厚度及其结构分布图。
本发明的优势在于:
1、该机器人能用于建筑内水域、隧道内水域、水域上表面离建筑物很近等非开阔水域内的水下淤泥厚度及其结构的探测工作;
2、采用浅地层剖面仪测量系统探测水域内的淤泥的厚度及其纵向分布情况,穿透剖面深度最大可达20m,面垂直分辨率可达厘米级;
3、采用水下惯性导航系统实时定位导航,机器人可在推进器的控制下实现水下姿态、速度、方向调整;
4、该机器人采用开架式结构,结构简单,机体小、运动灵活,能适应复杂的水下环境。
以上所述仅为本发明的优选实施例,并非因此限制本发明的专利范围,凡是在本发明的发明构思下,利用本发明说明书及附图内容所作的等效结构变换,或直接/间接运用在其他相关的技术领域均包括在本发明的专利保护范围内。
- 一种水下淤泥厚度探测机器人及其系统
- 一种仿泥鳅的水下淤泥探测机器人