压缩回光动态范围的同轴激光扫描雷达
文献发布时间:2023-06-19 11:11:32
技术领域
本发明属于激光雷达技术领域,尤其涉及一种压缩回光动态范围的同轴激光扫描雷达。
背景技术
激光扫描雷达利用主动发射的光的回波进行距离的探测,回波能量与探测距离的平方成反比,由最近测量距离和最远测量距离决定的测距范围越大,激光扫描雷达回光的动态范围也就越大。从信号探测角度,回光信号的动态范围越大,探测电路越复杂,并且电路的最大动态范围受电子器件技术水平限制,雷达测距的范围也就会受到限制。因此,有必要从光学系统角度探索压缩回光动态范围的方法。激光雷达分为同轴雷达和离轴雷达两类,中国专利CN104714221B中系统总结了到目前为止,人们对这两类雷达系统中的回光压缩问题的研究结果。从目前的结果看,这些已公开技术还没能很好的解决激光雷达中存在的问题。目前实际的激光扫描雷达系统还是在电路系统中解决大动态范围回光信号的测量问题。
发明内容
为了解决现有技术中存在的问题,本发明的目的在于提供一种压缩回光动态范围的同轴激光扫描雷达,通过在光学域中大幅压缩回光的动态范围,来降低对电子系统的技术要求,另外,在相同的电子系统动态范围下,有效增加激光扫描雷达的测距范围。
为了实现上述目的,本发明采用的技术方案是,一种压缩回光动态范围的同轴激光扫描雷达,包括激光测距模块和扫描系统,所述扫描系统位于所述激光测距模块的收发光路上;
所述激光测距模块包括激光发射窗口和光接收窗口,其中,每个所述光接收窗口至少包括一个光接收区,所述光接收区位于对应的所述激光发射窗口在所述扫描系统静止时由所述激光发射窗口被测量空间物体反射回的像光斑的旁边,使所述光接收区与所述激光发射窗口被最近测量距离处物体反射后成的像部分重叠,与最远测量距离处物体反射后成的像完全重叠。
进一步,所述激光测距模块包括分束镜和光学镜头、N个激光发射窗口、与激光发射窗口一一对应的N个光接收窗口,其中,N≥1;所述光接收窗口与对应的所述激光发射窗口位于所述分束镜两侧;所述光学镜头设置在所述分束镜与扫描系统之间,所述激光发射窗口位于所述光学镜头的前焦点处;或者,所述光学镜头分别设置在激光发射窗口与分束镜之间,以及所述光接收窗口与分束镜之间,且所述两光学镜头的光轴在空间交会,所述分束镜处在交会点处并使两光轴处于相对所述分束镜相互共轭的位置上;所述激光发射窗口位于与其对应的光学镜头的前焦点处。
优选的,所述分束镜中心部分开有通孔,非通孔区域镀有反射膜。
优选的,所述分束镜包括偏振分束镜和偏振旋转器;所述偏振分束镜用于依据输入光的偏转态,将入射光送到两个互相垂直的方向;所述偏振旋转器用于使通过它的线偏振光返回后偏振方向旋转90度。
优选的,所述偏振旋转器是四分之一波片,或者是45度法拉第旋转器。
进一步,所述激光测距模块包括N个激光发射窗口、与激光发射窗口一一对应的N个光接收窗口、及一个光学镜头,其中,N≥1;所述激光发射窗口设置在所述光学镜头的前焦点处,每个所述光接收窗口包括至少一个光接收区;当扫描系统静止时,所述激光发射窗口被测量空间物体反射回的像光斑与激光发射窗口重合,所述光接收区设置在与之对应的激光发射窗口旁。
优选的,所述激光发射窗口与所述接收窗口组合成一段双包层光纤的端面;所述双包层光纤的芯部为激光发射区;所述双包层光纤的内包层为光接收区;所述双包层光纤外壁某个区域的外包层上开有窗口;发射光通过所述双包层光纤芯部射出;接收光从所述双包层光纤内包层注入,注入内包层的接收光从光纤外包层上开设的窗口射出;或者,所述激光光发射窗口与光接收窗口组合成一段点环状双芯光纤的端面;所述点环状双芯光纤的中心芯部是一个园波导,是激光的发射区,围绕芯部的环状波导是光的接收区;所述点环状双芯光纤外壁某区域上的包层上开有窗口,使注入的接收光从包层上开设的窗口射出;或者所述激光发射窗口与所述光接收窗口组合成一段三芯光纤的端面;所述三芯光纤的芯一字排列,中心芯是激光发射区,旁边两个芯是光接收区,所述三芯光纤外壁某区域上的包层上开有窗口,使注入的接收光从包层上开设的窗口射出。
进一步,所述激光发射窗口是激光发射芯片谐振腔的输出窗口,或者是光纤的端面;所述光接收窗口是探测器的光敏面,或者是光纤器件的端面。
进一步,所述扫描系统为一维扫描系统,或者为两维扫描系统;所述一维扫描系统为单轴扫描振镜,或者为单轴旋转多棱反射镜,或者为单轴旋转平台;所述两维扫描系统由单轴器件按技术要求组合而成,所述单轴器件包括单轴旋转平台、单轴旋转多棱反射镜及单轴扫描振镜;或者所述两维扫描系统为双轴MEMS扫描振镜;或者所述两维扫描系统为排列在同一个平面上的、可同步工作的多个双轴MEMS扫描振镜组成的阵列。
进一步,当所述激光测距模块为两个及两个以上时,所述诸激光测距模块的收发光路以一定的夹角在空间交会。
与现有技术相比,本发明至少具有以下有益效果:本发明提出的雷达结构在光学域中大幅压缩近处测量区光回波的能量,同时保持远处测量区回波的能量不变,可以极大的压缩测量范围内回波能量的动态范围,在进行雷达设计过程中,可以极大的简化电路设计,降低电路系统的成本;本发明在光学域中的压缩光动态范围的方法简单可靠,有效增加雷达测量范围的同时保证了工作稳定性;远优于目前电域中采用的各种技术;另外,本发明的方案能够实现在现有电子器件技术水平下,大幅扩展扫描雷达的测距范围,在机载、车载雷达等应用中有非常重要的价值。
附图说明
图1A、图1B及图1C为本发明提出的激光测距头的光接收窗口的几种光接收区结构示意图。
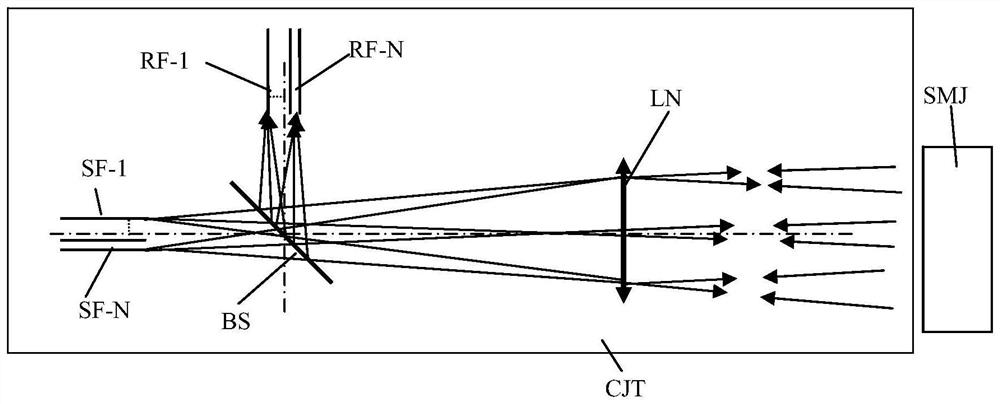
图2为本发明提出的激光扫描雷达的一种实施结构示意图。
图3为本发明提出的激光扫描雷达的第二种实施结构示意图。
图4为本发明提出的含有多个激光测距头的激光扫描雷达的一种实施结构示意图。
图5为本发明提出的激光扫描雷达的第三种实施结构示意图。
图6为本发明提出的激光扫描雷达的第四种实施结构示意图。
图7为本发明提出的激光扫描雷达的第五种实施结构示意图。
图8为本发明提出的激光扫描雷达的第六种实施结构示意图。
其中:S-1、S-N分别表示激光发射芯片谐振腔式发射窗口;SF-1、SF-N分别表示光纤发射窗口;R-1、R-2分别表示探测器光敏面式接收窗口;RF-1、RF-N分别表示光纤器件式接收窗口;LN、LN-1、LN-2分别表示光学镜头、第一光学镜头和第二光学镜头;BS表示分束镜,PBS为偏振分束镜;QWP为四分之一波片;SMJ表示扫描系统;CJT、CJT-1、CJT-M分别表示测距头;DCF-1、DCF-N表示双包层光纤。
具体实施方式
下面结合附图和具体实施例,对本发明提出激光扫描雷达进行详细说明。
在同轴激光扫描雷达中,扫描系统使不同测量距离上的回光的成像位置相对光发射时的位置发生成比例的偏移,本发明进行合理的结构设计,通过创造性的调节光接收窗口的位置和大小,在实现了抑制近处测量回波的能量的同时保持远处测量回波接收的能量不变,从而大幅抑制整个测量范围上的回波的动态范围,采用本发明所提出的技术方案,可使回波的动态范围实现成百上千倍的压缩,提升了激光扫描雷达应用场景。
本发明的压缩回光动态范围的同轴激光扫描雷达的第一种技术方案是:由至少一个激光测距模块和一个扫描系统组成。其中:激光测距模块由N(N大于等于1)个激光发射窗口、N个与激光发射窗口一一对应的光接收窗口、一个光学镜头及一个分束镜组成;N个激光发射窗口按设计要求排列,位于光学镜头的前焦点处。需要说明的是,激光发射窗口位于光学镜头的前焦点处,即激光发射窗口位于所述光学镜头的焦点附近,在具体实际操作中,对本领域技术人员来说,技术方案是清楚唯一的。
每个光接收窗口至少含一个光接收区;分束镜位于诸激光发射窗口与光学镜头之间;扫描系统位于激光测距模块的收发光路上;当激光扫描雷达含有两个或两个以上激光测距模块时,诸激光测距模块的收发光路以一定的夹角在扫描系统中交会;光接收窗口与对应的激光发射窗口位于分束镜两侧,并使光接收窗口的光接收区与激光发射窗口被最近测量距离处物体反射后成的像部分重叠,与最远测量距离处物体反射后成的像完全重叠;激光发射窗口被最近测量距离处物体反射后成的像偏离激光发射窗口由所述分束镜成的共轭像的距离为:2d
在这里需要指出,激光发射窗口由分束镜成的共轭像,就是扫描系统静止时由探测区返回光成的像。
本发明的压缩回光动态范围的同轴激光扫描雷达的第二种技术方案是:由至少一个激光测距模块和一个扫描系统组成。其中:激光测距模块由N(N大于等于1)个激光发射窗口、N个与激光发射窗口一一对应的光接收窗口、第一光学镜头、第二光学镜头及一个分束镜组成;N个激光发射窗口按设计要求排列,位于第一光学镜头的前焦点处;每个光接收窗口至少含一个光接收区;第一光学镜头和第二光学镜头的光轴在空间交会,分束镜设置在交会点处并使两光轴处于相对分束镜相互共轭的位置上;扫描系统位于激光测距模块后面的收发光路上;当扫描雷达含有两个或两个以上激光测距模块时,诸激光测距模块的收发光路以一定的夹角在空间交会;N个光接收窗口按一定规律排列,并使光接收窗口的光接收区与对应的激光发射窗口被最近测量距离处物体反射后成的像部分重叠,与最远测量距离处物体反射后成的像完全重叠;激光发射窗口被最近测量距离处物体反射后成的像偏离激光发射窗口由所述分束镜成的共轭像的距离为:2d
上述第二种方案比第一种方案多用了一个光学镜头,可以使光接收系统和发射系统采用不同的焦距和孔径,带来设计上的灵活性。
在上述两种方案中,激光发射窗口可以是激光发射芯片谐振腔的输出窗口,也可以是光纤的端面。
在上述两种技术中,光接收窗口可以是探测器的光敏面;也可以是光纤器件的端面。光接收窗口可以包括一个光接收区;也可以包括两个光接收区;还可以包括四个呈矩形排列的光接收区。图1A、图1B和图1C分布给出了光接收窗口包括一个、二个和四个光接收区的示意图。
在上述同轴激光扫描雷达种,由于扫描系统一直在运动,每个探测光脉冲从由发射器发出到照射被测物体再到反射回光进入探测器需要时间,这将造成接收光的相对发射光的共轭位置产生横向位移,位移量与探测距离、扫描系统的扫描速度有关。因此光接收窗口上光接收区的中心位置配置十分重要。当激光雷达只做单向扫描时,探测窗口可以只采用一个图1所示的光接收区,其中心位置对激光发射光共轭位置的偏离量及光接收区大小可以根据对回波光动态范围的压缩量要求、最近探测距离、最远探测距离及激光扫描系统扫描速度进行优化设计。
当激光雷达双向扫描时,光接收窗口可以采用图1B所示两个光接收区结构,这时其对称中心位于激光发射窗口在扫描系统静止时返回光形成的共轭像的位置处,每个光接收区的中心位置对发射光共轭位置的偏离量及大小可以根据对回波光动态范围的压缩量、最近探测距离、最远探测距离及激光扫描系统扫描速度进行优化设计。
当激光雷达的扫描方向多变时,光接收窗口可采用图1C所示的结构,光接收窗口包含4个光接收区,这时,其对称中心位于激光发射窗口在扫描系统静止时返回光形成的共轭像位置处,各光接收区中心位置及大小可以根据对回波光动态范围的压缩量、最近探测距离、最远探测距离及激光扫描系统扫描速度进行优化设计。
在上述两种同轴激光扫描雷达技术方案中,分束镜中心可以开有通孔。这种结构用在激光发射孔径远小于激光接收口径的场合,可以提高信噪比。
比如在一个实施例中,用于接收激光信号的第二光学镜头LN-2的孔径是用于发射激光镜头孔径的2.1倍,在反射镜中心开有使发射光信号通过的通孔,其它区域镀反射膜,回光信号的强度将大约是半透半反分束镜方式的3倍。
在上述两种同轴激光扫描雷达技术方案中,一种优选的方案是,分束镜由一个偏振分束镜和一个偏振旋转器组成;偏振分束镜依据输入光的偏转态,将入射光送到两个互相垂直的方向;偏振旋转器使通过它的线偏振光返回后偏振方向旋转90度。其中,偏振旋转器可以是四分之一波片,也可以是45度法拉第旋转器。这种结构通常用于光源是线偏振光的系统,它可以使发射光基本无损失的通过光分束镜,还可以使接收光基本无损失的通过光分束镜。这就可以大幅提升能量的利用率,增加探测光信号的信噪比。
参见图2中的同轴激光扫描雷达,这是依据本发明第一种技术方案的一种具体实施结构。其中:SF-1、SF-N为光纤发射窗口器件,RF-1、RF-N为光纤器件式接收窗口器件,BS为分束镜,LN为光学镜头。SF-1输出端面与RF-1的输入端面、SF-N的输出端面与RF-N的输入端面相对于分束镜BS的分光面基本处于物像共轭的位置上;SF-1、SF-N的输出端面按设计规律排列,位于光学透镜LN的前焦点处。在该激光测距头中,由激光发射窗口,比如SF-1,发出的光,通过分束镜BS、光学镜头LN后射向探测区域,由探测路径上某物体反射回的光通过光学镜头LN、分束镜BS后进入RF-1的输入端面。
在某个实施例中,SF-1、SF-N为单模光纤,RF-1、RF-2为大芯径多模光纤,接收光纤芯中心的位置及芯径由回波动态范围抑制要求、扫描速度和最近、最远测量距离决定。接收光纤器件获取的信号送到探测器获后供激光雷达的电子信息系统分析。
参见图5中的同轴激光扫描雷达,这是依据本发明第一种技术方案的另一种具体实施结构。其中:S-1、S-N表示激光发射芯片,R-1、R-N表示探测器,BS为分束镜,LN为光学镜头,CJT表示由前述部件组成的测距头,SMJ表示激光扫描系统;S-1的谐振腔的输出面与R-1的光敏面、S-N的谐振腔的输出面与R-N的光敏面相对于分束镜BS的分光面基本处于物像共轭的位置上;S-1、S-N的谐振腔的输出面按设计规律排列,位于光学透镜LN的前焦点处。在该激光测距头中,由某个激光器的发射芯片,比如S-1,发出的光,通过分束镜BS、光学镜头LN后射向探测区域,由探测路径上物体反射回的光通过光学镜头LN、分束镜BS后进入R-1光敏面。
在某个实施例中,每个接收窗口采用图1C所示结构,为一四象限光敏面,该四个光接收区的对称中心与发射区在扫描系统静止时返回光形成的共轭像重合,每个接收区中心的位置及光敏面大小根据回波抑制动态范围抑制要求、在该方向上的扫描速度、最近测量距离、和最远测量距离决定。输出的4个信号用于雷达电子信息系统分析。
参见图3中的同轴激光扫描雷达,这是依据本发明第二种技术方案的一种具体实施结构。其中:SF-1、SF-N为光纤发射窗口器件,RF-1、RF-N为光纤器件式的接收窗口器件,BS为分束镜,LN-1、LN-2分别表示第一光学镜头和第二光学镜头,CJT表示由前述部件组成的测距头,SMJ表示激光扫描系统;LN-1的光轴与LN-2的光轴互相垂直并相交,在两者的交点处设置分束镜BS,使LN-1和LN-2的光轴相对BS的分光面互为共轭;SF-1、SF-N的输出端面按设计要求的规律排列并位于LN-1的焦点处,RF-1、RF-N的输入端面位于LN-2的焦点处与SF-1、SF-N的输出光纤端面基本处于物像共轭的位置。在该激光测距头中,由光发射器件,比如SF-1,发出的光,通过光学镜头LN-1、分束镜BS、后射向探测区域,由探测路径上某物体反射回的光通过分束镜BS、光学镜头LN-2后进入RF-1的输入端面。
在某个实施例中,SF-1、SF-N为单模光纤,每个光接收窗口器件RF-1、RF-2都由两根大芯径多模光纤组成,结构如图1B所示,两个接收光纤芯的对称中心与对应的激光发射窗口在扫描系统静止时返回光形成的共轭位置重合,两根光纤中心位置和芯径根据回波抑制动态范围抑制要求、在该方向上的扫描速度、最近测量距离、和最远测量距离决定。接收光纤器件获取的信号送到探测器获后供激光雷达的电子信息系统分析。
参见图6中的同轴激光扫描雷达,这是依据本发明第二种技术方案的另一种具体实施结构。其中:S-1、S-N为激光发射芯片,R-1、R-N为探测器,BS为分束镜,LN-1、LN-2分别表示第一光学镜头和第二光学镜头,CJT表示由前述部件组成的测距头,SMJ表示激光扫描系统;第一光学镜头LN-1的光轴与第二光学镜头LN-2的光轴互相垂直并相交,在两者的交点处设置分束镜BS,使第一光学镜头LN-1的光轴与第二光学镜头LN-2的光轴相对BS的分光面互为共轭;激光发射芯片S-1、S-N的谐振腔输出面按设计要求的规律排列并位于第一光学镜头LN-1的焦点处,探测器R-1、R-N的光敏面位于第二光学镜头LN-2的焦点处与激光发射芯片S-1、S-N的输出面基本处于物像共轭的位置。在该激光测距头中,由某个激光器,比如激光发射芯片S-1发出的光,通过第一光学镜头LN-1、分束镜BS后射向探测区域,由探测路径上某物体反射回的光通过分束镜BS、第二光学镜头LN-2后进入探测器R-1的光敏面。
在某个实施例中,每个光接收窗口器件R-1、R-2都由两个光敏面组成,结构如图1B所示,两个光敏的对称中心与对应的激光发射窗口在扫描系统静止时返回光形成的共轭位置重合,光敏区中心位置及直径根据回波抑制动态范围抑制要求、在该方向上的扫描速度、最近测量距离、和最远测量距离决定。光接收窗口光敏区获取的信号送到探测器获后供激光雷达的电子信息系统分析。
本发明的压缩回光动态范围的同轴激光扫描雷达的第三种技术方案是:由至少一个激光测距模块和一个扫描系统组成。其中:激光测距模块由N(N大于等于1)个激光发射接收窗口、与发射窗口一一对应的N个接收窗口及一个光学镜头组成;N个激光发射接收窗口按设计要求排列,设置在光学镜头的前焦点处;每个光接收窗口包括一个激光发射区及至少一个光接收区,设置在对应的激光发射区旁,在这里需要指出,在扫描系统静止时,激光发射区返回光成的像与激光发射区重合;光接收区与激光发射窗区被最近测量距离处物体反射后成的像部分重叠,与最远测量距离处物体反射后成的像完全重叠;激光发射窗口被最近测量距离处物体反射后成的像偏离激光发射窗口的距离为:2d
在第三种雷达结构中,优选的,激光发射窗口和光接收窗口组合成一段双包层光纤的端面。其中:双包层光纤的芯部为激光发射区;双包层光纤的内包层为光接收区;双包层光纤外壁某个区域的外包层上开有窗口。发射光通过所述双包层光纤芯部射出;接收光从所述双包层光纤内包层注入,注入内包层的接收光从光纤外包层上开设的窗口射出。该激光发射窗口和光接收窗口组合可以适应各种扫描方向的雷达,光纤内包层的直径根据最远探测距离及激光扫描系统扫描速度进行优化设计。
在第三种雷达结构中,优选的,激光发射窗口和光接收窗口组合成一段点环状双芯光纤的端面;或者是一段三芯光纤的端面。点环状双芯光纤的中心芯部是一个圆波导,是激光的发射区,围绕芯部的环状波导是光的接收区;点环状双芯光纤外壁某区域上的包层上开有窗口,使注入的接收光射出。三芯光纤的芯一字排列,中心芯是激光发射区,旁边两个芯是光接收区。点环状双芯光纤可以满足各种扫描方向的雷达需求,其环状波导的宽度根据回波抑制动态范围抑制要求、扫描速度、最近测量距离、和最远测量距离决定。三芯光纤可以满足双向扫描雷达的需求,它的两个边缘芯的中心位置和芯径根据回波抑制动态范围抑制要求、扫描速度、最近测量距离、和最远测量距离决定。
参见图7中的同轴激光扫描雷达,这是依据本发明第三技术方案的一种具体实施结构示意图。其中:DCF-1、DCF-N为双包层光纤,用作激光发射窗口和光接收窗口,其端面按设计要求排列,位于光学镜头LN的焦点处。在该系统中,双包层光纤芯部为激光发射区,内包层为光接收区,光纤的外包层上开有窗口,可以将内包层中的光泄漏出来,用于探测。
在本发明的所有的同轴激光扫描雷达技术方案中:当激光扫描雷达含有两个或两个以上激光测距模块时,诸激光测距模块的收发光路以一定的夹角在扫描系统内交会。图4给出了一个采用多个激光测距头的激光扫描雷达的结构示意图,即采用M(M大于等于2)个多光束测距模块和一个激光扫描系统组合结构。其中,CJT-1、CJT-M为多光束测距头,它们的收发光路有一定的夹角在扫描系统SMJ中交会,共用激光扫描系统SMJ。
在本发明所有的同轴激光扫描雷达技术方案中,扫描系统可以为一维扫描系统,也可以为两维扫描系统。一维扫描系统可以是单轴扫描振镜,也可以是单轴旋转多棱反射镜,还可以是单轴旋转平台。两维扫描系统由单轴旋转平台、单轴旋转多棱反射镜及单轴扫描振镜等单轴器件按技术要求组合而成;或者,两维扫描系统为一个双轴MEMS扫描振镜;或者,两维扫描系统是排列在同一个平面上的、可以同步工作的多个双轴MEMS扫描振镜组成的阵列。
在某个具体实施例中,依据图8所示同轴扫描雷达结构研制了一种雷达。在该雷达系统中,分束器为偏振分束器PBS和四分之一波片QWP的组合,适当设置激光源的偏振方向、偏振分束器PBS和四分之一波片QWP快轴的相对方向,可以使光源SF-1发出的通过第一镜头准直的偏振光直接通过PBS,然后通过四分之一波片QWP后变成圆偏振光,再由扫描系统射向雷达探测空间,由被探测物体返回的光再次通过扫描系统和四分之一波片QWP后变成线偏振光,偏振方向相对光源发出的光旋转90度,被偏振分束器PBS反射到第二镜头汇聚到光接收窗口上。该雷达的主要技术要求:水平扫描角60度,垂直扫描角40度,最小测量距离1米,最大测量距离280米,帧频率20Hz,每帧扫描120线,每帧采样数不低于2.4万,采用一个发射窗口。根据上述指标以及本发明的方案,可以选用的扫描系统为双轴MEMS振镜,工作方式为双向扫描,其主要技术指标:快轴扫描角30度,慢轴扫描角20度;快轴谐振频率1.2KHz,慢轴扫描频率0到100Hz,可以满足扫描视场、扫描线数和帧频率的要求;选用的激光器为线偏振输出激光器,其发光区域直径0.01毫米,数值孔径0.1;选用的两个光学镜头焦距为15毫米。根据本发明的方案,可以将采样率设定为每线200个点,对应的采用角度为0.3度,将激光脉冲的发射周期设定为2微秒,采样点在接收面上的间距为0.0785毫米。根据双向扫描的工作方式,光接收窗口采用两个光接收区,分别位于发射窗口的共轭像的两边。根据上述参数,最近测距点返回光斑相对激光发射窗口共轭像的偏离量为0.25微米,最远测距点返回光斑相对激光发射窗口共轭像的偏离距离为73.27微米,不考虑光学镜头像差,返回光斑直径10微米,接收光纤的直径设定为74微米,数值孔径为0.1,光纤中心距发射窗口在扫描系统静止时返回光形成的共轭像中心的距离为42微米,这时最近处返回光斑与光接收区的重叠区域只有0.25微米,所接收的光斑能量约为总光斑能量的0.62%,显然,该雷达近处回波能量被极大的抑制,返回光的动态范围被压缩160倍。
在某个实施例中,需要将上述实施例中雷达的每帧的采样率增加一倍,由于激光发射频率受到最远测量距离限制,激光发射频率不能提高,本发明可以采用下述方案进行改造:
(1)增加一个激光发射窗口,这时两个发射窗口的光可以来自同一个激光器,也可以来自两个激光器,沿水平方向排列;(2)两个激光发射窗口之间的距离是探测面采样间距的(X+0.5)倍,X≥1,在该系统中,采用间距在接收面上的距离是0.0785毫米,该间距取为0.196毫米;(3)每个激光发射窗口对应两个光接收区,两个光接收区分布位于相对应的激光发射窗口的共轭像的两边,距共轭像中心的距离是42微米,接收光纤的芯径是74微米,数值孔径0.1。经过这种改造,系统每帧的采样率增加了一倍。
在某个实施例中,需要将上述实施例中雷达的水平市场角增加到120度,本发明在雷达中增加一个收发一体式激光测距头,两测距头输出光路夹角为30度,采用图4所示结构,两个光路在两轴扫描镜的镜面上交会。
在某个具体实施例中,采用图7所示扫描激光雷达结构研制了一种雷达,主要技术要求:水平扫描角60度,垂直扫描角40度,最近测量距离1米,最远测量距离280米,帧频率20Hz,每帧扫描120线,每帧采样数不低于2.4万。根据上述指标,本发明选用的扫描系统采用了双轴MEMS振镜,工作模式为双向扫描,其主要技术指标:快轴扫描角30度,慢轴扫描角20度;快轴谐振频率1.2KHz,慢轴扫描频率0到100Hz;选用的激光器随机偏振输出激光器,其发光区域直径0.01毫米,数值孔径0.1;选用的光学镜头焦距为15毫米;设定的激光脉冲的发射间隔为2微秒,将采样率设定为每线200个点,对应的采用角度为0.3度。根据上述指标,在该系统中,采样间距在接收面上的距离是0.0785毫米。复合光发射接收窗口为双包层光纤,光纤芯径10微米,数值孔径0.1;最远测距点返回光斑相对激光发射窗口的偏离距离为73.27微米,不考虑光学镜头像差,返回光斑直径10微米,接收光纤内包层的直径设定为158微米,数值孔径为0.1。最近测距点返回光斑相对激光发射窗口的偏离量为0.25微米,光纤内包层接收的光约为返回光斑能量的3.2%,显然,该雷达近处回波能量被较大的抑制,返回光的动态范围被压缩31倍。
在某个实施例中,需要将上述实施例中雷达的每帧的水平采样率增加一倍,由于激光发射频率受到最远测量距离限制,激光发射频率不能提高,根据本发明的方案,可以采用下述方案进行改造:(1)增加一个激光发射窗口,这时两个复合光发射接收窗口的光可以来自同一个激光器,也可以来自两个激光器,沿水平方向排列;(2)两个复合光发射接收窗口之间的距离是探测面采样间距的(X+0.5)倍,X≥1,在该系统中,采用间距在接收面上的距离是0.0785毫米,该间距取为0.196毫米。
在某个实施例中,需要将上述实施例中雷达的每帧的扫描线数增加一倍,由于激光发射频率收到最远测量距离限制,激光发射频率不能提高,根据本发明的方案,可以采用下述方案进行改造:(1)采用四个复合光发射接收窗口,排成两行,这时四个复合光发射接收窗口的光可以来自同一个激光器,也可以来自两个或四个激光器;(2)每行的两个复合发射接收窗之间的距离是探测面采样间距的(X+0.5)倍,X≥1,在该系统中,采用间距在接收面上的距离是0.0785毫米,该间距取为0.196毫米;(3)处于两行的发射窗口的角间距设置为0.1667度,线间距为0.043毫米;两行中的双包层光纤在水平方向错位0.56毫米安装。
在某个实施例中,需要将上述实施例中雷达的水平市场角增加到120度,根据本发明的方案,在雷达中增加一个收发一体式激光测距头,两测距头输出光路夹角为30度,采用图4所示结构,两个光路在两轴扫描镜的镜面上交会。
本发明提供的技术方案,在光学域中极大的压缩了返回光信号的动态范围,可以简化电子系统设计、减低系统成本。本发明提供的技术方案,可以使雷达的最高采样率成倍提高,有利同时提高帧频及每帧的采样率,为雷达的设计提供了极大的灵活性。本发明提出的第三雷达技术方案,可以使雷达的体积小型化,还可以使雷达调试极大简化,同时,光信号的利用率高,探测信号的信噪比也比现有其它技术方案高。
- 压缩回光动态范围的同轴激光扫描雷达
- 压缩回光动态范围的同轴激光扫描雷达