一种条形物体伸缩仿形系统
文献发布时间:2023-06-19 11:19:16
技术领域
本发明涉及一种条形物体伸缩仿形系统。
背景技术
在生物医学的肌肉细胞培育实验中,需要通过条形物体来模拟生物的肌肉活动,现有的仿生模拟方法不能够对条形物体的伸缩进行很好的控制,导致培育环境不稳定,进而导致培育失败。
发明内容
针对上述存在的技术问题,本发明的目的是:提出了一种条形物体伸缩仿形系统。
本发明的技术解决方案是这样实现的:一种条形物体伸缩仿形系统,包含流体通路,流体通路上设置有条形物体、往复机构和压力比例阀,往复机构由流体通路的流体控制,往复机构与条形物体的一端配合,条形物体的另一端固定;
所述条形物体的长度为D,条形物体的厚度为d,压力比例阀对流体通路调整后的压力为P,条形物体的伸缩伸缩量为S;
S=k2P*k3d*k4D;
其中,k2为压力比例阀的系数,k3为条形物体的厚度系数,k4为条形物体的长度系数;
通过控制压力比例阀,即可对条形物体的伸缩量进行动态控制。
优选的,所述流体通路上还设置有流量比例阀,流量比例阀对流体通路调整后的流量为F;
S=k1F*k2P*k3d*k4D;
k1为流量比例阀的系数。
优选的,所述压力比例阀对流体通路调整后的压力P的范围为0-10bar。
优选的,所述条形物体的伸缩量S为±50%。
优选的,所述流量比例阀对流体通路调整后的流量F的范围为0-200LPM。
由于上述技术方案的运用,本发明与现有技术相比具有下列优点:
本发明的条形物体伸缩仿形系统,由压力比例阀通过流体通路对往复机构进行压力控制,进而对条形物体进行动态的PWM或频率控制,使条形物体动态伸缩变化,可以有效模拟生物肌肉的活动状态,保证细胞培育效果;对于较为复杂的动态模拟要求,还可以在流体通路上设置流量比例阀来控制流体的流量,对条形物体进一步控制。
附图说明
下面结合附图对本发明技术方案作进一步说明:
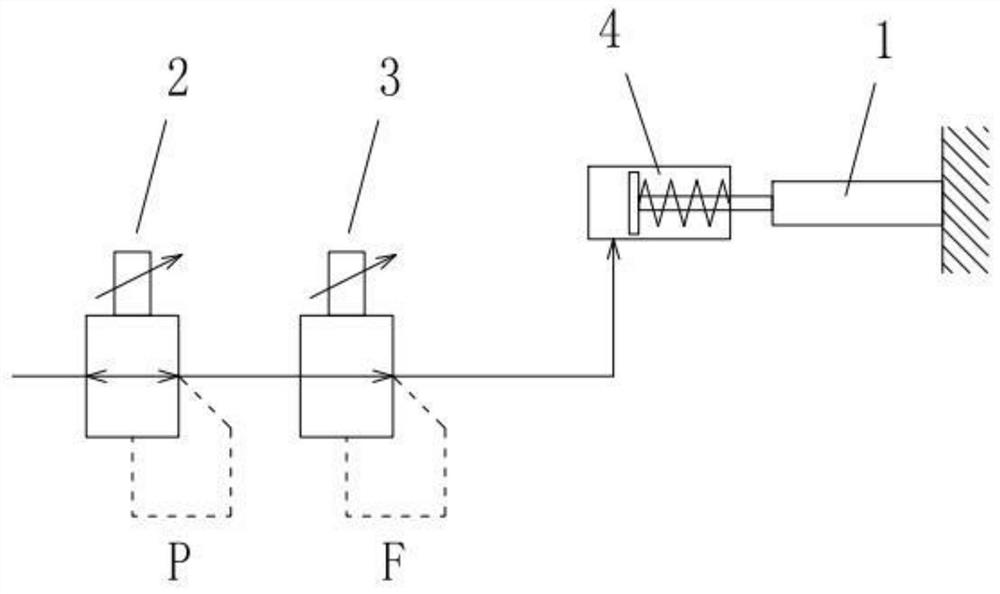
附图1为本发明所述的本发明所述的一种条形物体伸缩仿形系统的示意图。
具体实施方式
下面结合附图来说明本发明。
如附图1所示,本发明所述的一种条形物体伸缩仿形系统,包含流体通路,流体通路上设置有条形物体1、往复机构4、压力比例阀2和流量比例阀3;往复机构4由流体通路的流体控制,往复机构4可以是气缸或者液压缸等装置,气缸或液压缸可采用单通或双通形式;往复机构4的伸缩工作端与条形物体1的一端配合,条形物体1的另一端固定。
所述条形物体1的长度为D,条形物体1的厚度为d,压力比例阀2对流体通路调整后的压力为P,流量比例阀3对流体通路调整后的流量为F,条形物体1的伸缩伸缩量为S。
S=k1F*k2P*k3d*k4D。
其中,k1为流量比例阀3的系数,k2为压力比例阀2的系数,k3为条形物体1的厚度系数,k4为条形物体1的长度系数;在实验过程中,各个系数的范围一般定在0.01-100之间的常数,但不排除特殊的模拟环境会突破这个数值。
通过控制压力比例阀2和流量比例阀3,即可通过往复机构4对条形物体1的伸缩量进行动态控制;对于一些相对简单的模拟环境,也可以仅设置压力比例阀2,不要流量比例阀3。
所述压力比例阀2对流体通路调整后的压力P的范围为0-10bar,流量比例阀3对流体通路调整后的流量F的范围为0-200LPM,条形物体1的伸缩伸缩量S为±50%,流体介质一般为气体,往复机构4一般选用气缸。
上述实施例只为说明本发明的技术构思及特点,其目的在于让熟悉此项技术的人士能够了解本发明的内容并加以实施,并不能以此限制本发明的保护范围,凡根据本发明精神实质所作的等效变化或修饰,都应涵盖在本发明的保护范围内。
- 一种条形物体伸缩仿形系统
- 一种超挖刀液压系统及使用该系统减少仿形刀伸缩误差的方法