仿生蚂蚁机器人
文献发布时间:2023-06-19 11:24:21
技术领域
本发明涉及机械制造技术领域,特别涉及一种仿生蚂蚁机器人。
背景技术
随着科技的高速发展,智能设备被广泛应用于人们生活的各种情景,特别是在战场环境、雷场环境、山地火灾、高楼消防、污染现场等等大型装备及人力无法深入和完成的作业时,使用智能设备来处理尤为重要。但是,传统的智能机器狗,主要靠四肢爬行运动,通常可用于特殊地形特殊环境下的机械搬运,但全地形环境下仍然不能适应。若是使用六足爬行运动的蜘蛛机器人,虽然可以较好地适应全地形环境,但搭载的功能有限。目前,相关技术中的智能设备功能和用途仍然过于单一,使得技术拓展受限,给用户带来不便。
发明内容
本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明提出一种仿生蚂蚁机器人,能够适应全地形环境,从而优化该仿生蚂蚁机器人的功能和用途,给用户带来便利。
本发明实施例提供了一种仿生蚂蚁机器人,包括:头部机构,所述头部机构包括检测组件和执行组件,所述检测组件用于检测路面障碍物以使所述执行组件清除所述障碍物;身段机构,所述身段机构的一端连接所述头部机构,所述身段机构包括配载组件和多个行走组件,所述多个行走组件分别设置在所述身段机构的两侧,所述配载组件用于配载物品;尾部机构,所述尾部机构连接所述身段机构的另一端;控制机构,所述控制机构分别连接所述头部机构、所述身段机构和所述尾部机构,所述控制机构用于分别控制所述头部机构、所述尾部机构和所述身段机构工作。
根据本发明实施例的仿生蚂蚁机器人,至少具有如下有益效果:
使用该仿生蚂蚁机器人时,控制机构分别连接并控制头部机构、身段机构和尾部机构的工作,通过控制设置在头部机构的检测组件检测路面障碍物,然后控制执行组件清除运动方向上的障碍物以保障机器人通行顺利,再控制多个行走组件的配合以带动配载在身段机构的配载组件上的物品移动至待作业的工作环境中。通过使用该仿生蚂蚁机器人,能够在更多不同的工作环境下利用机器人处理人力无法深入和完成的作业,并使机器人能够适应全地形环境的同时保证较好的搭载功能,从而优化仿生蚂蚁机器人的功能和用途,给用户带来便利。
根据本发明的一些实施例,所述执行组件包括夹持件和/或切割件,所述夹持件和所述切割件分别连接至所述头部机构,所述夹持件用于夹持所述障碍物,所述切割件用于切割所述障碍物。
设置在头部机构的夹持件,能够将路面上运动方向的障碍物夹持并移走以保证通行顺利;设置头部机构的切割件,能够将路面上运动方向的障碍物切割分离以保证通行顺利。
根据本发明的一些实施例,所述身段机构包括第一身段组件和第二身段组件,所述第一身段组件连接所述头部机构,所述第二身段组件的两端连接分别连接所述第一身段组件和所述尾部机构,所述第一身段组件和所述第二身段组件的两侧设置有所述行走组件,所述配载组件设置在所述第一身段组件和/或所述第二身段组件上。
将身段机构分为第一身段组件和第二身段组件,可以更好地控制身段机构的两端的工作,并且将配载组件设置在所述第一身段组件和/或所述第二身段组件上,能够使位于身段机构两侧的行走组件实现更多不同的工作方式,使得仿生蚂蚁机器人的适应场景更广,从而提高用户的便利性。
根据本发明的一些实施例,所述行走组件包括第一行走组件和第二行走组件,所述第一行走组件包括多个分别设置在所述第一身段组件两侧的机械臂,所述机械臂的一端转动连接至所述第一身段组件,当所述机械臂的另一端转动至所述第一身段组件的下方,所述机械臂用于带动所述仿生蚂蚁机器人移动;当所述机械臂的另一端转动至所述第一身段组件的上方,所述机械臂用于夹持物品;所述第二行走组件连接所述第二身段组件。
在第一行走组件中设置相对第一身段组件可转动的机械臂,能够方便仿生蚂蚁机器人将物品放置到配载组件上,使得仿生蚂蚁机器人的工作更加自动化,从而方便用户的使用。
根据本发明的一些实施例,所述行走组件设置有可活动的驱动轮,当所述驱动轮处于第一位置,所述行走组件用于爬行;当所述驱动轮处于第二位置,所述行走组件用于滚动行驶。
在行走组件上设置可活动的驱动轮,使得驱动轮处于第一位置时,可以用于爬行,从而更好地适应全地形环境;处于第二位置时,可以用于滚动行驶,从而加快仿生蚂蚁机器人的运动速度,使其适应场景更多样。
根据本发明的一些实施例,所述仿生蚂蚁机器人还包括第一转向连接器和第二转向连接器,所述第一转向连接器连接所述头部机构和所述身段机构,所述第二转向连接器连接所述身段机构和所述尾部机构,所述第一转向连接器和所述第二转向连接器用于调整运动方向。
使用第一转向连接器连接头部机构和身段机构,以及使用第二转向连接器连接身段机构和尾部机构,使得头部机构和身段机构相对可转动、身段机构和尾部机构相对可转动,使得仿生蚂蚁机器人的各个机构间的灵活性更强,从而有利于机器人在不同地形中移动,使得机器人的适应性更强。
根据本发明的一些实施例,所述控制机构包括总线,所述头部机构设置有第一主控板,所述身段机构设置有第二主控板,所述尾部机构设置有第三主控板,所述第一主控板、所述第二主控板和所述第三主控板分别连接至所述总线。
设置第一主控板、第二主控板和第三主控板分别控制头部机构、身段机构和尾部机构,并设置第一主控板、第二主控板和第三主控板之间通过总线连接,使得仿生蚂蚁机器人实现分段独立控制,从而使头部机构、身段机构和尾部机构各部分功能可以相互拆分和组合。同时,头部机构、身段机构和尾部机构之间可以通过总线实现通讯以相互配合工作,使得仿生蚂蚁机器人的实用性更强,功能和用途更多样化。
根据本发明的一些实施例,所述尾部机构还包括消防灭火剂、后视传感控制器和载重传感器,所述消防灭火剂、所述后视传感控制器和所述载重传感器分别连接至所述第三主控板。
在尾部机构设置消防灭火剂、后视传感控制器和载重传感器,使得尾部机构可以通过后视传感控制器检测路面的障碍物,从而更好地适应全地形的工作环境。另外,消防灭火剂可用于火灾灭火,使得仿生蚂蚁机器人可用于山地火灾、高楼消防等工作情景,从而提高装置的实用性。而载重传感器,则可在机器人装载物品时检测物品的重量,从而实现更准确的配载,提高机器人使用的便利性。
根据本发明的一些实施例,所述尾部机构还包括支撑组件,所述支撑组件用于平衡所述身段机构。
由于配载物品时,仿生蚂蚁机器人可能出现不平稳的状况而导致物品掉落,设置支撑组件有利于保持机器人的平稳状态,从而避免物品掉落,使得机器人的使用更加便利。
根据本发明的一些实施例,所述控制机构还包括电源组件,所述电源组件连接所述尾部机构,所述电源组件包括分布式能量块、充供电管理控制器、外设充电接口和储能模块,所述充供电管理控制器分别连接至所述外设充电接口和所述分布式能量块,所述储能模块连接至所述分布式能量块。
在控制机构中设置电源组件可以为仿生蚂蚁机器人提供电源,并且设置外设充电接口能够方便地为其充电,从而提高机器人使用的便利性。
本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
本发明的附加方面和优点结合下面附图对实施例的描述中将变得明显和容易理解,其中:
图1为本发明的一实施例的仿生蚂蚁机器人的结构示意图;
图2为本发明的一实施例的仿生蚂蚁机器人另一视角的结构示意图;
图3为本发明的一实施例的仿生蚂蚁机器人的头部机构的结构示意图;
图4为本发明的一实施例的仿生蚂蚁机器人的第一身段组件的结构示意图;
图5为本发明的一实施例的仿生蚂蚁机器人的第二身段组件的结构示意图;
图6为本发明的一实施例的仿生蚂蚁机器人的行走组件的结构示意图;
图7为本发明的一实施例的仿生蚂蚁机器人的控制机构的模块示意图;
图8为本发明的一实施例的仿生蚂蚁机器人的控制机构的程序流程图。
具体实施方式
下面详细描述本发明的实施例,实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
在本发明的描述中,需要理解的是,涉及到方位描述,例如上、下、前、后、左、右等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
在本发明的描述中,如果有描述到第一、第二只是用于区分技术特征为目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量或者隐含指明所指示的技术特征的先后关系。
本发明的描述中,除非另有明确的限定,设置、安装、连接等词语应做广义理解,所属技术领域技术人员可以结合技术方案的具体内容合理确定上述词语在本发明中的具体含义。
下面结合附图,对本发明实施例作进一步阐述。
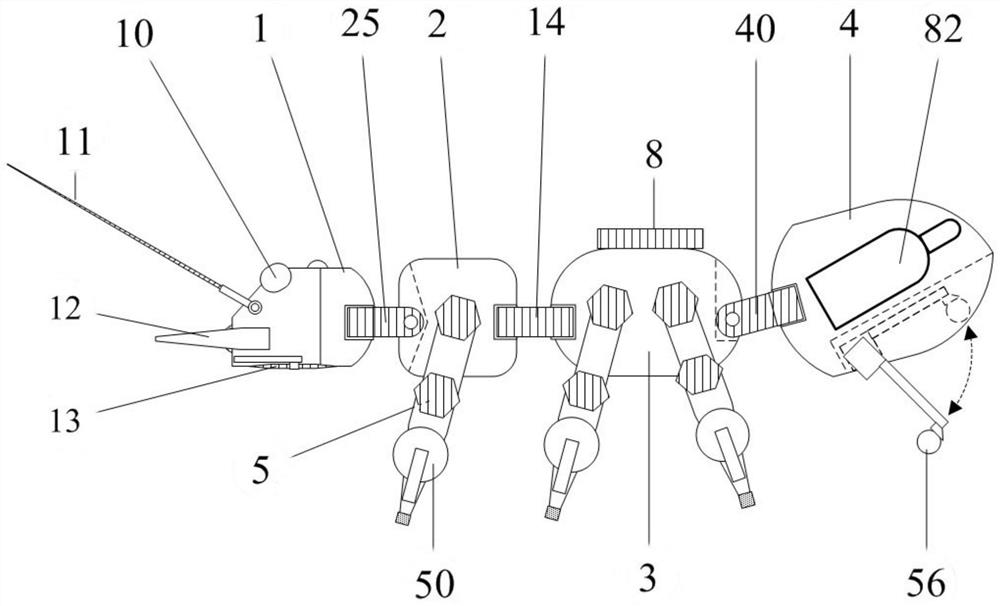
参照图1,仿生蚂蚁机器人包括但不限于有头部机构1、身段机构、尾部机构4和控制机构(图中未示出)。具体地,头部机构1包括检测组件和执行组件,检测组件用于检测路面障碍物以使执行组件清除障碍物;身段机构的一端连接头部机构1,身段机构包括配载组件8和多个行走组件5,多个行走组件5分别设置在身段机构的两侧,配载组件8用于配载物品;尾部机构4连接身段机构的另一端;控制机构分别连接头部机构1、身段机构和尾部机构4,控制机构用于分别控制头部机构1、尾部机构4和身段机构工作。
可以理解的是,使用该仿生蚂蚁机器人时,控制机构分别连接并控制头部机构1、身段机构和尾部机构4的工作,通过控制设置在头部机构1的检测组件检测路面障碍物,然后控制执行组件清除运动方向上的障碍物以保障机器人通行顺利,再控制多个行走组件5的配合以带动配载在身段机构的配载组件8上的物品移动至待作业的工作环境中。通过使用该仿生蚂蚁机器人,能够在更多不同的工作环境下利用机器人处理人力无法深入和完成的作业,并使机器人能够适应全地形环境的同时保证较好的搭载功能,从而优化仿生蚂蚁机器人的功能和用途,给用户带来便利。
需要说明的是,检测组件可以为红外传感器、视觉传感器等,只要能够实现仿生蚂蚁机器人的机器视觉功能即可,本实施例并不对其做限制;执行组件可以为电锯、剪刀等,只要能够清除路面障碍物即可,本实施例并不对其做限制;配载组件8可以为搭载平台、集装箱等,本实施例并不对其做限制;行走组件5可以为机械腿、弹跳机构等,只要能够使得仿生蚂蚁机器人运动即可,本实施例并不对其做限制。
参照图1和图3,执行组件包括夹持件和/或切割件,夹持件和切割件分别连接至头部机构1,夹持件用于夹持障碍物,切割件用于切割障碍物。
可以理解的是,设置在头部机构1的夹持件,能够将路面上运动方向的障碍物夹持并移走以保证通行顺利;设置头部机构1的切割件,能够将路面上运动方向的障碍物切割分离以保证通行顺利。
需要说明的是,执行组件可以只包括夹持件或切割件,也可以同时设有夹持件和切割件,本实施例并不对其做限制。另外,夹持件可以为虎钳、卡盘、吸盘等,本实施例并不对其做限制;切割件可以为电锯、镰刀等,本实施例并不对其做限制。
示例性的,如图3和图7所示,头部机构1设有活动的眼睛总成10、触角总成11、钳嘴总成12、电锯总成13和视觉识别探测器700。其中,触角总成11为检测组件,包括鞭状天线段、伸缩天线段、球头调向机构112、无线通讯收发控制器703和触觉传感器704,该触角总成11还可作为电磁探雷传感器705。钳嘴总成12为执行组件中的夹持件,包括一种剪刀式夹具,用于夹持和清除路面的障碍物。电锯总成13为执行组件中的切割件,包括锯盘130、电动摇臂装置131和驱动电机132,使得切割件可以180度方位进行切割,并与钳嘴总成12配合清除路面障碍物,从而使得仿生蚂蚁机器人能够更好地适应不同地形的工作环境。
参照图1和图5,身段机构包括第一身段组件2和第二身段组件3,第一身段组件2连接头部机构1,第二身段组件3的两端连接分别连接第一身段组件2和尾部机构4,第一身段组件2和第二身段组件3的两侧设置有行走组件5,配载组件8设置在第一身段组件2和/或第二身段组件3上。
可以理解的是,将身段机构分为第一身段组件2和第二身段组件3,可以更好地控制身段机构的两端的工作,并且将配载组件8设置在第一身段组件2和/或第二身段组件3上,能够使位于身段机构两侧的行走组件5更多种的工作方式,使得仿生蚂蚁机器人的适应场景更广,从而提高用户的便利性。
需要说明的是,配载组件8可以仅设置在第一身段组件2或第二身段组件3上,也可以同时设置在第一身段组件2和第二身段组件3上,本实施例并不对其做限制。
示例性的,如图2所示,第一身段组件2的两侧设置有第一左肢体总成21和第一右肢体总成22,第二身段组件3的两侧设置有第二左肢体总成31、第二右肢体总成30、第三左肢体总成33和第三右肢体总成32。第一左肢体总成21和第一右肢体总成22,第二左肢体总成31、第二右肢体总成30、第三左肢体总成33和第三右肢体总成32相互配合构成四肢以支撑身段机构。其中,第二身段机构3上还设置有用于搬运物品的配载组件8。
参照图2、图4和图5,行走组件5包括第一行走组件和第二行走组件,第一行走组件包括多个分别设置在第一身段组件2两侧的机械臂,机械臂的一端转动连接至第一身段组件2,当机械臂的另一端转动至第一身段组件2的下方,机械臂用于带动仿生蚂蚁机器人移动;当机械臂的另一端转动至第一身段组件2的上方,机械臂用于夹持物品;第二行走组件连接第二身段组件3。
可以理解的是,在第一行走组件中设置相对第一身段组件2可转动的机械臂,能够方便仿生蚂蚁机器人将物品放置到配载组件8上,使得仿生蚂蚁机器人的工作更加自动化,从而方便用户的使用。
示例性的,第一身段组件2包括第一左肢体总成21、第一右肢体总成22、第一万向节23和第二万向节24,还内装有第一身段主控板71,从而控制第一左肢体总成21、第一右肢体总成22充当机械腿,以与第二身段组件3的行走组件5配合爬行;还控制第一左肢体总成21、第一右肢体总成22充当机械手,以与钳嘴总成12配合抓取和搬运物品。其中,第一万向节23与第一右肢体总成22连接以使第一右肢体总成22相对第一身段组件2可转动,第二万向节24与第一左肢体总成21连接以使第一左肢体总成21相对第一身段组件2可转动。第二身段组件3包括第二左肢体总成31、第二右肢体总成30、第三左肢体总成33和第三右肢体总成32,还内装有第二身段主控板72、姿态传感器、运动控制器及内舱等。此外,尾部机构4上还安装有诸如激光器、消防枪、枪械等外设装备82以使仿生蚂蚁机器人适应全地形的工作环境需求。
示例性的,配载组件8包括安装在第二身段组件3上的搭载平台、特种装备等,本实施例并不对其做限制。
参照图5和图6,行走组件5设置有可活动的驱动轮50,当驱动轮50处于第一位置,行走组件5用于爬行;当驱动轮50处于第二位置,行走组件5用于滚动行驶。
可以理解的是,在行走组件5上设置可活动的驱动轮50,使得驱动轮50处于第一位置时,可以用于爬行,从而更好地适应全地形环境;处于第二位置时,可以用于滚动行驶,从而加快仿生蚂蚁机器人的运动速度,使其适应场景更多样。
示例性的,如图4至图6所示,驱动轮50包括第一舵机500、轮臂装置501、电动轮子502和驱动器503。驱动轮50安装在第一左肢体总成21和第一右肢体总成22,第二左肢体总成31、第二右肢体总成30、第三左肢体总成33和第三右肢体总成32的外壁上,可受控垂直方向180度调整以使驱动轮50处于第一位置或第二位置,从而调整仿生蚂蚁机器人的运动方式。此外,第一左肢体总成21和第一右肢体总成22的驱动轮50可用于调整运动方向,第二左肢体总成31、第二右肢体总成30、第三左肢体总成33和第三右肢体总成32的驱动轮50用于动力驱动。
示例性的,如图2所示,第一左肢体总成21通过第一万向节23和第一身段组件2连接,第一右肢体总成22通过第二万向节24和第一身段组件2连接,使得第一左肢体总成21和第一右肢体总成22在万向节驱动器62的驱动下可实现270度控制肢体转动,从而实现支撑躯体及行走的作用。
示例性的,如图2所示,第一左肢体总成21安装有第一驱动轮53,第一右肢体总成22安装有驱动轮50,第二左肢体总成31安装有第三驱动轮54、第二右肢体总成30安装有第四驱动轮51、第三左肢体总成33安装有第五驱动轮55,第三右肢体总成32安装有第六驱动轮52。
参照图2,仿生蚂蚁机器人还包括第一转向连接器25和第二转向连接器40,第一转向连接器25连接头部机构1和身段机构,第二转向连接器40连接身段机构和尾部机构4,第一转向连接器25和第二转向连接器40用于调整运动方向。
可以理解的是,使用第一转向连接器25连接头部机构1和身段机构,以及使用第二转向连接器40连接身段机构和尾部机构4,使得头部机构1和身段机构相对可转动、身段机构和尾部机构4相对可转动,使得仿生蚂蚁机器人的各个机构间的灵活性更强,从而有利于机器人在不同地形中移动,使得机器人的适应性更强。
示例性的,头部机构1与身段机构的连接处为第一转向连接器25,该第一转向连接器25可用于调整仿生蚂蚁机器人运动的前进方向。尾部机构4与身段机构的连接处为第二转向连接器40,使得尾部机构4可配合头部机构1左右摆动、上翘等以调整仿生蚂蚁机器人的中心位置。
示例性的,仿生蚂蚁机器人还包括第三转向连接器14,第三转向连接器14连接第一身段组件2和第二身段组件3,使得第一身段组件2和第二身段组件3相对可转动,从而提高仿生蚂蚁机器人的各个机构间的灵活性。
参照图7,控制机构包括总线,头部机构1设置有第一主控板70,身段机构设置有第二主控板,尾部机构4设置有第三主控板73,第一主控板70、第二主控板和第三主控板73分别连接至总线。其中,第二主控板包括第一身段主控板71和第二身段主控板72。
可以理解的是,设置第一主控板70、第二主控板和第三主控板73分别控制头部机构1、身段机构和尾部机构4,并设置第一主控板70、第二主控板和第三主控板73之间通过总线连接,使得仿生蚂蚁机器人实现分段独立控制,从而使头部机构1、身段机构和尾部机构4各部分功能可以相互拆分和组合。同时,头部机构1、身段机构和尾部机构4之间可以通过总线实现通讯以相互配合工作,使得仿生蚂蚁机器人的实用性更强,功能和用途更多样化。
示例性的,如图7所示,控制机构设置有智能仿生控制系统7,该智能仿生控制系统7包括但不限于有第一主控板70,第二主控板(包括第一身段主控板71和第二身段主控板72)、第三主控板73并通过总线链接,其中第一主控板70连接并控制视觉识别探测器700,红外传感器701、超声波探测器702、无线通讯收发控制器703、触觉传感器704、电磁探雷传感器705、温度传感器706、足压力传感器707等传感器。
示例性的,尾部机构4还包括消防灭火剂、后视传感控制器和载重传感器,消防灭火剂、后视传感控制器和载重传感器分别连接至第三主控板73。
可以理解的是,在尾部机构4设置消防灭火剂、后视传感控制器和载重传感器,使得尾部机构4可以通过后视传感控制器检测路面的障碍物,从而更好地适应全地形的工作环境。另外,消防灭火剂可用于火灾灭火,使得仿生蚂蚁机器人可用于山地火灾、高楼消防等工作情景,从而提高装置的实用性。而载重传感器,则可在机器人装载物品时检测物品的重量,从而实现更准确的配载,提高机器人使用的便利性。
示例性的,尾部机构4包括第二转向连接器40、尾腔体和辅助支撑总成,还内装有第三主控板73,在尾腔体内装备消防灭火剂、后视传感控制器,载重传感器,并通过第三主控板73控制消防灭火剂、后视传感控制器和载重传感器的使用。
参照图1,尾部机构4还包括支撑组件,支撑组件用于平衡身段机构。
可以理解的是,由于配载物品时,仿生蚂蚁机器人可能出现不平稳的状况而导致物品掉落,设置支撑组件有利于保持机器人的平稳状态,从而避免物品掉落,使得机器人的使用更加便利。
示例性的,支撑组件包括全向支撑轮56,该全向支撑轮56由第二舵机、轮臂装置、万向轮构成整体,安装在尾部机构4的尾腔体中。
参照图7,示例性的,控制机构还包括电源组件,电源组件连接尾部机构4,电源组件包括分布式能量块90、充供电管理控制器91、外设充电接口92和储能模块93,充供电管理控制器91分别连接至外设充电接口92和分布式能量块90,储能模块93连接至分布式能量块90。
可以理解的是,在控制机构中设置电源组件可以为仿生蚂蚁机器人提供电源,并将电力分配到各个驱动器和电动装置上,而且,设置外设充电接口92能够方便地为其充电,从而提高机器人使用的便利性。
参照图8,示例性的,控制机构的设置有智能仿生控制系统7,该智能仿生控制系统7主程序如图8所示,主要包括A手动控制程序、B自动控制程序和C自主进程控制程序三个程序模块。其中,手动控制程序A为最高优先级别的控制,它包括A0准备、A1初始化、A2人工指令、A3多传感器检测及A13中断、A4手动进程、A8提取、A9数据库、A10选取、A11循环、A14判定、A15输出、A18执行的主线图。而自动控制程序B为优先级别控制,它包括A2人工指令、B5判断、B6自动进程、B7提取、A9数据库、A10选取、A11循环、A14判定、A15输出、A18执行的主线图。自主进程控制程序C为深度学习控制,它只有在自动控制程序B的控制下同时获取多传感器请求A3发出请求A13中断指令有效,并检索数据库A9有无与之相匹配的数据的条件下开启自主进程C19,进入C20可变起点、C21分段进程、A15输出、A18执行构成的主线图。以上三种程序模块A、B、C的运行数据结果都通过A16传递、A17存储、A9数据库的主线图进行数据筛选并存储,从而完成智能仿生控制系统7的核心控制。
上面结合附图对本发明实施例作了详细说明,但是本发明不限于上述实施例,在所属技术领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下,作出各种变化。
- 一种仿生蚂蚁机器人及基于仿生蚂蚁机器人的信息系统
- 一种仿生蚂蚁六足探测机器人