六相永磁同步发电机占空比合成矢量低复杂度模型预测直接功率控制方法
文献发布时间:2023-06-19 11:27:38
技术领域
本发明涉及电机控制技术,具体涉及一种占空比合成矢量低复杂度模型预测直接功率控制的六相永磁同步发电机控制方法。
背景技术
与三相电机相比,多相电机因其输出功率大、转矩脉动小、容错性能好等诸多优点,在电动汽车、风力发电、航空航天、船舶推进等领域受到关注。其中,双三相永磁同步电机结合了永磁电机与多相电机的优势,是目前多相电机领域研究的热点。将双三相电机与PWM变流器相结合的永磁同步发电系统可以改善单机容量受变流器限制的情况,进一步拓宽了多相电机的应用。但是双三相电机是一个非线性、强耦合的系统,且PWM变流器开关状态较多,需要对其进行空间矢量解耦,然后分析不同电压矢量对发电机控制的影响,从而减少发电机的定子电流谐波,降低功率脉动。
模型预测控制凭借其优越的控制性能逐渐成为国内外学者研究的热点。根据空间矢量解耦原理,对于双三相电机,需要同时对基波子平面和谐波子平面进行控制,在保证系统控制性能的同时减小谐波电流造成的损耗。将模型预测引入双三相发电系统可以减少PI调节器的数量,同时减小控制器参数整定的复杂度。在双三相发电系统中采用模型预测直接功率控制,可以有效降低发电机定子电流谐波,并使PWM整流系统运行于高功率因数状态,在保证系统运行稳定性的情况下有效拓宽PWM整流器的容量。
在每个采样周期内,模型预测直接功率控制需要预测每一种开关状态或者开关序列作用下的有功功率和无功功率的值,然后通过价值函数优化来选择出最优的开关状态或者开关序列,因此导致计算量较大。尤其在多电平逆变器、多相电机、扩展电压矢量集以及多步模型预测等情况下,计算量大这一问题尤为明显。
发明内容
本发明针对双三相发电系统模型预测直接功率控制谐波电流大、计算量大的问题,提出了一种六相永磁同步发电机占空比合成矢量低复杂度模型预测直接功率控制策略,不仅减少了算法的计算量,而且减小了电流谐波和功率脉动,实现了有功功率和无功功率的快速控制,使双三相永磁同步发电系统运行于高功率因数状态。
为实现上述发明目的,本发明采用如下技术方案:
一种六相永磁同步发电机占空比合成矢量低复杂度模型预测直接功率控制方法,包括以下步骤:
步骤1:通过控制器A/D采样获得永磁同步发电机的定子电压e
步骤2:电压外环控制器由比例积分控制器构成,生成q轴电流参考值,乘以外环电压,得到有功功率参考值;
步骤3:对发电系统进行空间矢量解耦,然后根据基波子平面和谐波子平面矢量对应关系,得到十二个合成矢量,并对合成矢量重新划分扇区;
步骤4:计算出零矢量作用时复功率的负共轭(-S
步骤5:计算出零矢量作用时复功率的负共轭差值△(-S*)
步骤6:根据期望电压角度θ求取期望电压矢量所在的扇区号N;
步骤7:根据无差拍原理计算期望电压矢量的作用时间t
进一步,步骤3中的十二个合成矢量为:
根据幅值不同,将α-β子空间的电压矢量分为4组,由外到内分别为大矢量D
为了减少谐波电流在z
式中,M为合成矢量的幅值;
根据伏秒平衡原则,在z
式中,T
在α-β子空间组成了十二个合成矢量,并对其扇区进行重新划分。
进一步,步骤4中的零矢量作用时复功率的负共轭(-S*)
在k+1时刻,可得在d-q坐标系下预测的复功率S为:
其中,S
将上式变为d-q坐标系下的(-S
其中,(-S
零矢量的负共轭复功率(-S
进一步,步骤5中计算零矢量作用时复功率的负共轭差值△(-S*)
在一个采样周期内,由电压矢量u
其中,(-S
零矢量作用时复功率的负共轭差值△(-S*)
其中,(-S
期望电压角度θ为:
其中,
进一步,所述步骤6中的根据期望电压角度θ求取期望电压矢量所在的扇区号N表示为:
N=mod[θ/(2π)]
其中,θ为期望电压角度,mod表示为求取余数。
进一步,步骤7中计算期望电压矢量的作用时间t
P
将上文的复功率分解可以得到:
其中,S
为了得到合成矢量作用时间,构建使有功功率和无功功率误差最小化的价值函数:
J=(P
对上式求偏导,解得合成矢量的作用时间为
如果t
本发明的有益效果是:
1、本发明采用占空比合成矢量的模型预测直接功率控制方法,不同于传统的单矢量预测,可以有效减小发电机定子电流谐波。同时在一个采样周期内在线优化选择矢量作用时间,减少了发电机系统的功率脉动。采用模型预测直接功率控制的方式,省略了两个PI控制器,便于参数的调试和整定。
2、本发明采用的低复杂度算法,以d-q坐标下下的复功率的负共轭为控制变量,通过计算可以直接获得目标矢量所在的扇区位置,无需遍历所有的电压矢量,减小了算法的复杂度。
3、本发明所提出的控制方法,可以满足电动汽车、风力发电、电动飞机、船舶推进等高新技术领域高精度运行的要求,提高发电机运行的效率。
4、本发明有利于减少发电机定子电流谐波和功率脉动,同时减轻了模型预测算法控制的复杂度,使发电机系统可以运行于高功率因数状态,提高变流器的利用率,改善发电机系统的控制性能。
附图说明
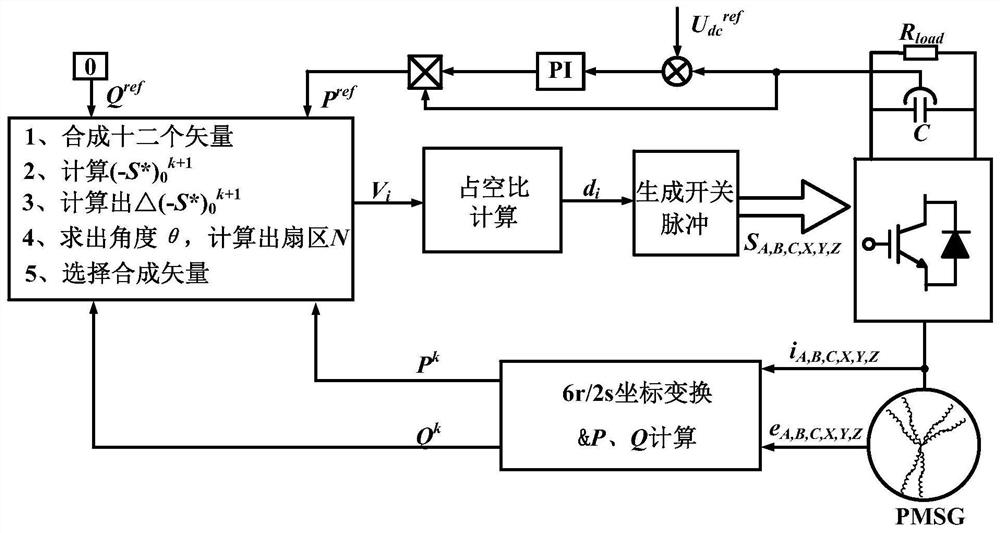
图1为六相永磁同步发电机占空比合成矢量低复杂度模型预测直接功率控制框图;
图2为空间电压矢量在α-β子空间的分布图;
图3空间电压矢量在z
图4为合成电压矢量在α-β子空间的分布图;
图5为合成矢量占空比低复杂度算法流程图;
图6为单位周期内有功无功波形图;
图7为发电机定子电压电流相位关系图;
图8为发电机有功功率和无功功率波形图;
图9为直流母线电压波形图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
如图1结构框图所示,本发明是六相永磁同步发电机占空比合成矢量低复杂度模型预测直接功率控制方法,主要包括矢量合成、占空比计算、低复杂度控制,其具体措施如下:
1、构建被控系统:被控系统由六相永磁同步发电机与PWM整流器组成。
本发明控制对象为双三相永磁同步发电机,双三相发电机由原动机经过连接器拖动,发电机连接整流器为负载供电。
2、通过控制器A/D采样获得永磁同步发电机六相电压e
将电机六相电压e
其中,矩阵第一行和第二行对应α-β子空间;矩阵第三行和第四行对应z
有功和无功功率P
P
Q
3、如图1所示,采集电容器组电压,与电容电压给定值比较,将差值送入电容PI控制器,生成q轴电流参考值,乘以外环电压,得到有功功率参考值。
如图2和图3所示,对双三相发电系统进行空间矢量解耦,根据幅值不同,将α-β子空间的电压矢量分为4组,由外到内分别为大矢量(D
4、根据幅值不同,将α-β子空间的电压矢量分为4组,由外到内分别为大矢量(D
为了减少谐波电流在z
式中,M为合成矢量的幅值。
根据伏秒平衡原则,在z
式中,T
在α-β子空间组成了十二个合成矢量,合成矢量如图4所示。
5、如图5所示,将α-β子空间的电流和电压转化为d-q坐标下的反电动势e
在k+1时刻,可得在d-q坐标系下预测的复功率S为:
其中,S为发电机侧的复功率,e
将上式变为d-q坐标系下的(-S
其中,E为发电机反电动势峰值。
零矢量的负共轭复功率(-S
在一个采样周期内,由电压矢量u
零矢量的作用误差
期望电压角度θ为:
其中,θ
扇区号N可以表示为:
N=mod[θ/(2π)]
其中,mod表示为求取余数。
6、在单位周期内同时作用合成矢量和零矢量的作用效果如图5所示。图中,P
可将k+1时刻的有功功率和无功功率表示为:
其中S
为了得到合成矢量作用时间,构建使有功和无功功率误差最小化的价值函数:
J=(P
对上式求偏导,解得合成矢量的作用时间为
需要注意的是,如果t
图7为发电机系统运行是的A相定子电压和电流波形,给定发电机速度750r/min,发电机定子电压大小为35V,定子电流大小为5A,定子电压和电流保持同相位,且定子电流谐波畸变率小,实现了双三相发电系统的高功率因数控制。
图8为发电机有功无功功率波形图,有功功率在500W上下波动,无功功率在零上下波动,且有功功率和无功功率脉动较小。图9为整流器直流母线电压,直流母线电压稳定在100V,且纹波较小。表明所提出的合成矢量低复杂度算法具有很好的控制效果,既减小了发电机定子电流谐波和有功无功功率脉动,也能减少算法的复杂度,使发电机运行于高功率因数状态。
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示意性实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
尽管已经示出和描述了本发明的实施例,本领域的普通技术人员可以理解:在不脱离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由权利要求及其等同物限定。
- 六相永磁同步发电机占空比合成矢量低复杂度模型预测直接功率控制方法
- 一种基于三矢量的低复杂度模型预测直接功率控制方法