气缸装置
文献发布时间:2023-06-19 11:55:48
技术领域
本发明涉及一种具备旋转机构的气缸装置。
背景技术
下述专利文献中公开有一种具备使收容于气缸本体内的轴构件旋转的机构的气缸装置。
在专利文献1中,公开有一种使轴构件旋转的旋转驱动马达(无刷直流马达)。
在专利文献2中,具备使轴构件以规定角度旋转的旋转驱动部。旋转驱动部具有步进马达或者伺服马达等旋转马达。
在专利文献3中,轴构件安装有旋转驱动部。旋转驱动部具有转子以及包围转子的周围的定子。转子配置有磁铁,定子配置有线圈。通过电磁的作用而旋转驱动轴构件。
现有技术文献
专利文献
专利文献1:日本特开2011-69384号公报
专利文献2:日本特开2017-133593号公报
专利文献3:日本特开2017-9068号公报
发明内容
(发明所要解决的技术问题)
但是,如现有技术所示,在通过马达等使轴构件旋转的构成中,存在电力消耗增大、无法适当地谋求小型化的问题。也就是说,由于使用马达而产生热,因此,电力消耗容易增大。此外,由于使轴构件机械性地旋转,因此,旋转机构复杂化,无法适当地谋求小型化。除此之外,还要求抑制旋转不均匀。
本发明是鉴于以上问题点而完成的,特别地,其目的在于提供一种能够减少电力消耗以及能够谋求小型化并且能够抑制旋转不均匀的气缸装置。
(用于解决技术问题的技术手段)
本发明为一种具有气缸本体和支承在所述气缸本体内的轴构件的气缸装置,其特征在于,所述气缸本体设置有旋转机构部,所述旋转机构部具备旋转室,所述旋转室用于根据流体的作用而使所述轴构件旋转,至少在所述旋转机构部的前端部以及后端部设置有旋转用端口,所述旋转用端口与所述旋转室连通。
在本发明中,优选的是,分别设置于所述旋转机构部的前端部以及后端部的所述旋转用端口用于供给所述流体,在所述旋转机构部的外周部设置有与所述旋转室连通的流体排出用的旋转用端口。此时,优选的是,所述轴构件连接有旋转体,所述旋转体配置于所述旋转室,所述旋转体具备第一旋转体和第二旋转体,所述第一旋转体接收从所述旋转机构部的前端部供给至所述旋转室的所述流体,同时,将所述流体输送至所述流体排出用的旋转用端口,所述第二旋转体接收从所述旋转机构部的后端部供给至所述旋转室的所述流体,同时,将所述流体输送至所述流体排出用的旋转用端口。
在本发明中,可以使设置于所述旋转机构部的前端部以及后端部的一个所述旋转用端口用于供给所述流体,另一个所述旋转用端口用于排出所述流体。此时,优选的是,所述轴构件连接有旋转体,所述旋转体配置于所述旋转室,所述旋转体为如下构造:能够接收从一个所述旋转用端口供给而来的所述流体,同时能够使所述流体流向另一个所述旋转用端口。
在本发明中,优选的是,所述轴构件能够进行冲程地被支承。
在本发明中,优选的是,在所述气缸本体内划分出具备气缸室的冲程机构部与所述旋转机构部,所述冲程机构部设置有冲程用端口,所述冲程用端口与所述气缸室连通,用于通过流体的供给/排出而使所述轴构件进行冲程。
在本发明中,优选的是,所述轴构件具备流体轴承,所述轴构件在所述气缸本体内以漂浮的状态被支承。
(发明的效果)
根据本发明的气缸装置,能够谋求减少电力消耗以及小型化,并且能够抑制旋转不均匀。
附图说明
图1是第一实施方式的气缸装置的正面侧外观立体图。
图2是第一实施方式的气缸装置的背面侧外观立体图。
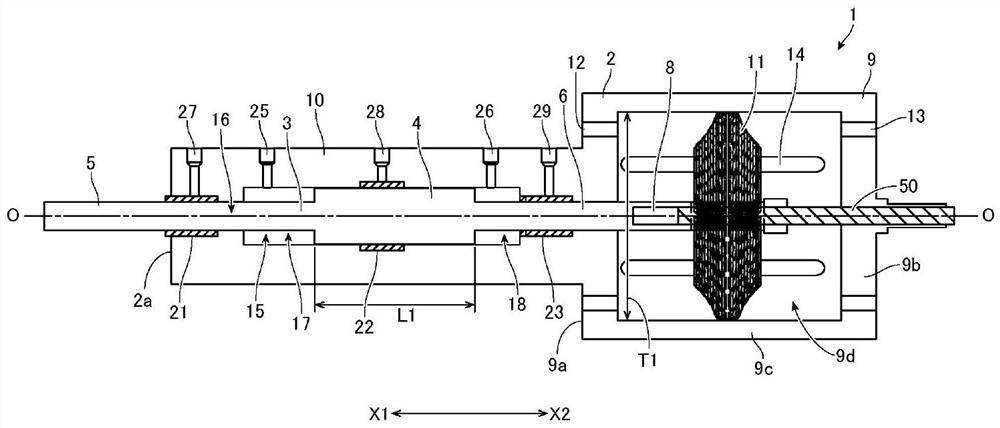
图3是第一实施方式的气缸装置的截面图。
图4是示出使旋转构件从图3的状态向前方进行冲程后的状态的截面图。
图5是示出使轴构件从图3的状态向后方进行冲程后的状态的截面图。
图6A至图6C是第一实施方式中使用的旋转体的图。
图7是第二实施方式的气缸装置的正面侧外观立体图。
图8是第二实施方式的气缸装置的背面侧外观立体图。
图9是第二实施方式的气缸装置的截面图。
图10是示出使轴构件从图9的状态向前方进行冲程后的状态的截面图。
图11是示出使轴构件从图9的状态向后方进行冲程后的状态的截面图。
图12A至图12C是第二实施方式中使用的旋转体的图。
具体实施方式
以下,对本发明的一个实施方式(以下,简称为“实施方式”。)进行详细说明。
<第一实施方式>
图1是第一实施方式的气缸装置的正面侧外观立体图。图2是第一实施方式的气缸装置的背面侧外观立体图。图3是第一实施方式的气缸装置的截面图。图4是示出使轴构件从图3的状态向前方进行冲程后的状态的截面图。图5是示出使轴构件从图3的状态向后方进行冲程后的状态的截面图。图6A至图6C是第一实施方式中使用的旋转体的图。
气缸装置1具有如下部分而构成:气缸本体2和支承于气缸本体2的轴构件3。
(轴构件)
在第一实施方式中,轴构件3能够旋转地被支承。另一方面,轴构件3的冲程是任意的。也就是说,第一实施方式的气缸装置1既可以为仅轴构件3能够旋转的构成,也可以为能够进行轴构件3的旋转与冲程两者的构成。后述的第二实施方式中也是如此。但是,以下对能够使轴构件3旋转的同时能够使其向轴向进行冲程的气缸装置1进行说明。
此外,所谓的“旋转”是指以轴构件3的轴中心O(参照图3)作为旋转中心进行旋转。所谓的“冲程”是指轴构件3向轴向(X1-X2方向)移动。X1方向是气缸装置1的前方侧,X2方向是气缸装置1的后方侧。
如图3所示,本实施方式的轴构件3以规定的直径形成,并且具有活塞4、第一活塞杆5和第二活塞杆6而构成,所述活塞4在轴向(X1-X2方向)上以规定的长度尺寸L1形成,所述第一活塞杆5设置于活塞4的前端面,且直径小于活塞4的直径,所述第二活塞杆6设置于活塞4的后端面,且直径小于活塞4的直径。
另外,如图3所示,活塞4、第一活塞杆5以及第二活塞杆6优选为一体化形成。如图3所示,活塞4、第一活塞杆5以及第二活塞杆6的轴中心O聚集在一条直线上。
如图3所示,在第二活塞杆6的后端部,朝向第一活塞杆5的方向形成有沿着轴中心O的孔8。
另外,如图3所示,在第二活塞杆6的后端部的外周连接有旋转体11。
(气缸本体)
如图1至图3所示,气缸本体2具备旋转机构部9和冲程机构部10。在气缸本体2的前方侧(X1方向)划分出冲程机构部10,在气缸本体2的后方侧(X2方向)划分出旋转机构部9。
如图1至图3所示,旋转机构部9以直径大于冲程机构部10的方式形成。旋转机构部9具有如下部分而构成:前端部9a;后端部9b;以及连接前端部9a与后端部9b之间的外周部9c,在被前端部9a、后端部9b以及外周部9c包围的内部具备旋转室(空间)9d。连接于轴构件3的旋转体11配置在旋转室9d内。如图3所示,旋转室9d向前后方向(X1-X2方向)的长度如图4、图5所示确保了当轴构件3在前后方向上进行冲程时的旋转体11的最大移动量。
此外,如图3所示,旋转室9d的直径T1(与前后方向(X1-X2方向)正交的方向的宽度)稍微大于旋转体11的直径T2(参照图6B)。
如图1、图3所示,在圆环状的前端部9a上,沿着周方向形成有多个第一旋转用端口12。第一旋转用端口12与旋转室9d内连通。各第一旋转用端口12优选以等间隔形成。
如图2、图3所示,在后端部9b上,沿着周方向形成有多个第二旋转用端口13。第二旋转用端口13与旋转室9d内连通。各第二旋转用端口13优选以等间隔形成。
此外,各第一旋转用端口12与各第二旋转用端口13优选形成于在前后方向(X1-X2方向)相对向的位置,不过,即使在周方向上错开也无妨。
在图1至图3中,第一旋转用端口12以及第二旋转用端口13以圆状形成,但并未限定其形状。也可以为多边形或者长孔形状等。另外,第一旋转用端口12与第二旋转用端口13优选为相同形状,不过,即使为不同形状也无妨。
如图1至图3所示,在旋转机构部9的外周部9c,沿着外周方向形成有在前后方向(X1-X2方向)上长的长孔状的多个第三旋转用端口14。各第三旋转用端口14优选以等间隔形成。第三旋转用端口14可以为长孔状以外的形状,例如可以为与第一旋转用端口12以及第二旋转用端口13相同的圆状,不过,由于第三旋转用端口14用于排出流体,因此,优选的是,第三旋转用端口14的总面积大于第一旋转用端口12以及第二旋转用端口13的总面积,能够促进流体排出。
第一旋转用端口12以及第二旋转用端口13用于供给空气或者水等流体。另一方面,第三旋转用端口14用于排出流体。在本实施方式中,经由第一旋转用端口12以及第二旋转用端口13从旋转室9d的前后供给流体。例如,流体为压缩空气,旋转体11从前方以及后方两个方向接收压缩空气而旋转。接触到旋转体11的压缩空气向侧方扩散,并从第三旋转用端口14排出至外部。通过旋转体11的旋转,能够使连接于旋转体11的轴构件3以轴中心O为旋转中心而旋转。
如图3所示,在冲程机构部10的内部设置有气缸室15。另外,设置有插通部16,所述插通部16从气缸室15贯通至气缸本体2的前端面2a,并与气缸室15接续。
如图3所示,轴构件3的活塞4收容于气缸室15。另外,轴构件3的第一活塞杆5插通于插通部16。
此外,气缸室15为具有比活塞4的直径稍大的直径的大致圆筒空间。此外,气缸室15的前后方向(X1-X2方向)上的长度尺寸形成得比活塞4的长度尺寸L1长。因此,活塞4在轴向(X1-X2方向)上移动自如地收容于气缸室15。
在图3的状态下,活塞4收纳于气缸室15的前后方向(X1-X2方向)的中央附近。因而,在活塞4的前方(X1侧)以及后方(X2侧)分别留出空间。此处,将前方侧的空间称为“第一流体室17”,并将后方侧的空间称为“第二流体室18”。分别划分出第一流体室17与第二流体室18而彼此不会干扰。
如图3所示,冲程机构部10形成有冲程用端口25、26,所述冲程用端口25、26连通于第一流体室17以及第二流体室18。
本实施方式的气缸装置1例如为空气轴承式,并且设置有多个空气轴承21、22、23。如图3所示,空气轴承21以包围第一活塞杆5的外周的方式配置。另外,空气轴承22为以包围活塞4的外周的方式配置。另外,空气轴承23以包围第二活塞杆6的外周的方式配置。
并未对各空气轴承21~23进行限定,例如可以使用将使用烧结金属或者碳的多孔质材料形成环状的空气轴承,或者是小孔节流型的空气轴承等。
如图3所示,冲程机构部10设置有空气轴承加压端口27、28、29,所述空气轴承加压端口27、28、29从外周面连通于各空气轴承21、22、23。
通过将压缩空气供给至各空气轴承加压端口27~29,压缩空气经由各空气轴承21~23而均匀地喷出到活塞4、第一活塞杆5以及第二活塞杆6的表面。由此,活塞4、第一活塞杆5以及第二活塞杆6分别在气缸室15内以及插通部16内以漂浮的状态被支承。
在本实施方式的气缸装置1中,如上所述,通过从旋转体11的前后供给流体,并从侧方排出,能够使旋转体11以及轴构件3以轴中心O作为旋转中心而旋转。旋转角度不受限制,能够根据流体量来调节旋转数和旋转速度。
在本实施方式中,通过空气轴承式使轴构件3的活塞4在气缸本体2的气缸室5内以漂浮的状态被支承。因此,在本实施方式中,能够使轴构件3在气缸本体2内保持漂浮的状态而旋转。由于轴构件3与气缸本体2不接触,因此,能够减少旋转阻力,且能够进行高精度的旋转。进一步,在使轴构件3于气缸本体2内漂浮的状态下,利用来自与气缸室15连通的冲程用端口25、26的压缩空气的供给/排出,而在第一流体室17与第二流体室18之间产生压差。由此,能够使活塞4在轴向(X1-X2方向)上进行冲程。虽然并未图示,但是通过与各冲程用端口25、26连通的伺服阀能够适当地调整气缸控制压。
从图3的状态,通过伺服阀并经由冲程用端口25而吸引第一流体室17的压缩空气。另一方面,通过伺服阀并经由冲程用端口26而将压缩空气供给至第二流体室18内。由此,在第一流体室17与第二流体室18之间产生压差,如图4所示,能够使活塞4向前方(X1)移动。由此,能够使第一活塞杆5从气缸本体2的前端面2a向前方突出。
在气缸室15与插通部16之间设置有前方壁40,限制活塞4以使其无法向前方壁40的更前方移动。另外,虽然并未图示,但是优选在前方壁40上设置弹性环。弹性环作为活塞4与前方壁40接触时的缓冲材料而发挥作用。
或者,从图3的状态,通过伺服阀并经由冲程用端口26而吸引第二流体室18的压缩空气。另一方面,通过伺服阀并经由冲程用端口25而将压缩空气供给至第一流体室17中。由此,在第一流体室17与第二流体室18之间产生压差,如图5所示,能够使活塞4向后方(X2)移动。由此,能够将第一活塞杆5从气缸本体2的前端面2a拉入后方。
气缸室15的后方壁42为限制活塞4向后方(X2)移动的限制面,活塞4无法向后方壁42的更后方移动。另外,虽然并未图示,但是优选在后方壁42上设置弹性环。弹性环作为活塞4与后方壁42接触时的缓冲材料而发挥作用。
(旋转体)
对第一实施方式的旋转体11进行说明。如图6A至图6C所示,第一实施方式的旋转体11具备第一旋转体11a和第二旋转体11b,所述第一旋转体11a接收来自第一旋转用端口12的流体,所述第二旋转体11b接收来自第二旋转用端口13的流体。如图6C所示,在第一旋转体11a与第二旋转体11b之间设置有支承体30。在支承体30的中央部形成有贯通孔30a。设置有筒状部31,所述筒状部31与该贯通孔30a的前后连通。支承体30以及筒状部31优选以一体的形式形成。
如图6A至图6C所示,第一旋转体11a由配置于支承体30的表面30b的多个叶片32而构成。各叶片32为大致相同形状的板材。叶片32具备第一连接部32a和第二连接部32b,所述第一连接部32a与设置于支承体30的表面30b的筒状部31的外周面连接,所述第二连接部32b与支承体30的表面30b的周缘部连接。叶片32的第一连接部32a抵接于比支承体30的表面30b向更前方离开的筒状部31的外周面,且叶片32以从第一连接部32a朝向第二连接部32b逐渐倾斜的状态被支承(也参照图6C)。另外,如图6A或者图6B所示,邻接的叶片32彼此之间以从正面观察时一部分重叠的方式配置。
第二旋转体11b由配置于支承体30的背面30c的多个叶片33而构成。虽然并未图示,但是各叶片33与构成第一旋转体11a的叶片32同样地,从筒状部31的外周面朝向支承体30的背面30c倾斜,同时,相邻的各叶片33以一部分重叠的方式配置。
在图6A至图6C所示的旋转体11中,构成第一旋转体11a的多个叶片32与构成第二旋转体11b的多个叶片33以支承体30作为对称面而面对称地配置。
旋转体11在第二活塞杆6穿过筒状部31的状态下固定支承于第二活塞杆6的外周面。
从第一旋转用端口12供给至旋转室9d内的流体接触到第一旋转体11a的叶片32。另外,从第二旋转用端口13供给至旋转室9d内的流体接触到第二旋转体11b的叶片33。此时,由于第一旋转体11a与第二旋转体11b的各叶片32、33面对称地配置,因此,分别在相同方向上产生旋转力,能够使旋转体11高精度地旋转。此时,如果各第一旋转用端口12与各第二旋转用端口13形成于在前后方向(X1-X2方向)上相对向的位置的话,则当流体经由各旋转用端口12、13而作用于第一旋转体11a以及第二旋转体11b时,能够使施加于第一旋转体11a与第二旋转体11b的轴向的力相互抵消,同时有效地产生旋转力,不易在轴向上施加多余的力。
此外,将图3所示的旋转室9d的直径T1(与前后方向正交的方向的宽度)形成与旋转体11的直径T2(参照图6B)大致相同。由此,能够尽量减少从各旋转用端口12、13供给至旋转室9d内的流体经由旋转体11而通过至相反侧的量。因此,能够抑制从各旋转用端口12、13供给的流体在旋转室9d内混合在一起,并能够高精度地旋转。此外,通过使旋转体11的直径T2稍微小于旋转室9d的直径T1,能够使旋转体11在不接触旋转室9d的壁面的情况下旋转。
在本实施方式中,分别接触到第一旋转体11a以及第二旋转体11b的流体向侧方扩散,并通过第三旋转用端口14排出至外部。通过旋转体11产生的离心力以及构成第一旋转体11a以及第二旋转体11b的各叶片32、33的倾斜,能够适当地使流体向侧方扩散。
这样,在本实施方式中,例如通过使用图6A至图6B所示的旋转体11的构造,能够实现从前后方向(X1-X2方向)对旋转体11供给流体,并能够实现从侧方(与前后方向正交的方向)向外部放出的流体的流动,能够使旋转体11连接的轴构件3以轴中心O作为旋转中心而高精度地旋转。
(传感器)
如图3至图5所示,在形成于第二活塞杆6的后端部的孔8内,传感器(冲程传感器)50以不与第二活塞杆6接触的方式设置。传感器50在气缸本体2的后端部侧被固定支承。
在本实施方式中,能够利用配置在孔8内的传感器50来测定活塞4的位置。传感器50能够应用现有的传感器,例如能够使用磁性传感器、过电流传感器、光学传感器等。
将通过传感器50测定得到的位置信息发送至未图示的控制部。能够基于通过传感器50测定得到的位置信息来调整第一流体室17以及第二流体室18的气缸控制压力,且能够控制第一活塞杆5从前端面2a的突出量。
此外,也能够通过传感器50测定轴构件3的旋转数以及旋转速度。能够基于传感器50的旋转信息来调整旋转压力,且能够控制旋转体11的旋转数以及旋转速度。
〈第二实施方式〉
图7是第二实施方式的气缸装置的正面侧外观立体图。图8是第二实施方式的气缸装置的背面侧外观立体图。图9是第二实施方式的气缸装置的截面图。图10是示出使轴构件从图9的状态向前方进行冲程后的状态的截面图。图11是示出使轴构件从图9的状态向后方进行冲程后的状态的截面图。图12A至图12C是在第二实施方式中使用的旋转体的图。
以下,主要说明与第一实施方式的气缸装置1的不同之处。另外,对与第一实施方式的气缸装置1相同构造的构件标注相同的符号。如图7、图8所示,气缸装置61具有如下部分而构成:气缸本体62、支承在气缸本体62内的轴构件3。
气缸本体62划分出旋转机构部69与冲程机构部10。如图9等所示,旋转机构部69具有如下部分而构成:前端部69a、后端部69b、和连接前端部69a与后端部69b之间的外周部69c,在被前端部69a、后端部69b以及外周部69c包围的内部具备旋转室(空间)69d。
如图7至图9所示,第二实施方式的旋转机构部69也与第一实施方式的旋转机构部9同样地,在前端部69a以及后端部69b上分别设置有第一旋转用端口72以及第二旋转用端口73,但是,与第一实施方式不同,在外周部69c上并未设置旋转用端口。
在第二实施方式中,第一旋转用端口72以及第二旋转用端口73中的任意一者用于供给流体,而另一者用于排出流体。
如图12A至图12B所示,与轴构件3的第二活塞杆6的后端部连接的旋转体71例如具有如下部分而构成:环部83;位于环部83的中心的圆筒部81;和放射线状连接圆筒部81与环部83之间的多个叶片82。各叶片82以等角度配置,各叶片82之间为贯通的空间A。如图12B等所示,各叶片82以从前端侧朝向后端侧倾斜的状态被支承。也可以不配置环部83,但是为了增强,优选配置环部83。
旋转体71在第二活塞杆6穿过圆筒部81的状态下固定支承于第二活塞杆6的后端部。
在本实施方式中,将图9所示的旋转室69d的直径T3(与前后方向正交的方向的宽度)形成得与旋转体71的直径T4(参照图12B)大致相同,但是优选直径T3稍微大于直径T4。
在第二实施方式中,例如经由第二旋转用端口73将压缩空气送入旋转室69d内。压缩空气接触到叶片82,从而旋转体71旋转。压缩空气经由叶片82之间的空间A而从第一旋转用端口72排出至外部。
如上所述,由于将旋转室69d的直径T3形成得与旋转体71的直径T4大致相同大小,因此,能够将供给至旋转室69d内的流体的大部分应用于旋转体71的旋转,能够提高相对于流体供给量的旋转效率。此外,通过将旋转体71的直径T4形成得稍微小于旋转室69d的直径T3,旋转体71不会在旋转室69d的壁面滑动,能够使其以漂浮的状态旋转。
在第二实施方式的气缸装置61中,也与第一实施方式的气缸装置1同样地,能够通过空气轴承式在气缸本体2的内部对轴构件3在其漂浮的状态下进行支承。并且,在轴构件3于气缸本体2内漂浮的状态下,利用来自与气缸室15连通的冲程用端口25、26的压缩空气的供给/排出,在气缸室15内产生压差,由此,能够使活塞4在轴向(X1-X2方向)上进行冲程。由此,能够在尽量减少滑动阻力的状态下,从图9的状态而如图10所示,实现使第一活塞杆5从前端面2a朝向前方(X1方向)突出,或者是从图9的状态而如图11所示,实现将第一活塞杆5朝向后方(X2方向)拉入。在本实施方式中,能够使轴构件3一边旋转一边进行向前后方向(X1-X2方向)的冲程,并能够实现高精度的冲程以及旋转。
对本实施方式的特征性部分进行说明。
本实施方式为具有气缸本体2、62以及支承在气缸本体2、62内的轴构件3的气缸装置1、61,其特征在于,在气缸本体2、62中设置有旋转机构部9、69,所述旋转机构部9、69具备用于根据流体的作用使轴构件3旋转的旋转室9d、69d。并且,至少在旋转机构部9、69的前端部9a、69a以及后端部9b、69b设置有与旋转室9d、69d连通的旋转用端口12、13、72、73。
这样,在本实施方式中,将连通于旋转室9d、69d的旋转用端口12、13、72、73配置于轴构件3的轴向即前后方向(X1-X2方向)。在本实施方式中,可以通过供给至旋转室9d、69d内的流体的作用而使轴构件3旋转。根据该构成,与现有技术所示的使用步进马达或者伺服马达等旋转马达的构成相比,能够谋求减少电力消耗以及小型化。
此外,如本实施方式,在通过流体的作用而使轴构件3旋转的构成中,能够抑制旋转不均匀。特别地,在本实施方式中,能够使流体沿着轴向作用,当旋转时,轴构件3上不易产生偏心,能够有效地抑制旋转不均匀。
在第一实施方式的气缸装置1中,分别设置于旋转机构部9的前端部9a以及后端部9b的第一旋转用端口12以及第二旋转用端口13分别用于供给流体。然后,在旋转机构部9的外周部9c设置有连通于旋转室9d的用于排出流体的第三旋转用端口14。由此,能够构成将流体从前后方向(X1-X2方向)供给至旋转室9d内的同时从侧方排出的旋转机构,能够适当地进行流体的供给/排出。由此,能够有效地抑制旋转不均匀。此外,通过这样的流体的流动,能够适当地抑制轴构件3产生朝向轴向(X1-X2方向)的推力。
第一实施方式的旋转体11例如以图6A至图6C所示的构造具体化。也就是说,旋转体11具备:接收从旋转机构部9的前端部9a供给至旋转室9d的流体的第一旋转体11a;以及接收从旋转机构部9的后端部9b供给至旋转室9d的流体的第二旋转体11b。第一旋转体11a以及第二旋转体11b具备能够将流体从设置于旋转机构部9的外周部9c的第三旋转用端口14排出至外部的叶片构造。
这样,由于旋转体11为从前后两个方向接收流体的构造,因此,即使旋转体11在旋转室9d内的位置改变,仍然能够抑制产生朝向轴向(X1-X2方向)的推力。通过根据旋转体11的位置来调节来自第一旋转用端口12以及第二旋转用端口13的流体量,能够有效地抑制推力的产生。
另外,在第二实施方式的气缸装置61中,设置于旋转机构部69的前端部69a以及后端部69b的一个旋转用端口用于供给流体,而另一个旋转用端口用于排出流体。由此,能够沿着轴向(X1-X2方向)适当地供给/排出流体,并能够有效地抑制旋转不均匀。
第二实施方式的旋转体71例如以图12A至图12C所示的构造具体化。也就是说,旋转体71具有能够接收从一个旋转用端口供给而来的流体的同时使流体朝向另一个所述旋转用端口流动的叶片构造。通过这种旋转体71,流体不会在旋转室69d内滞留,能够有效地抑制旋转不均匀。除此之外,在第二实施方式中,能够使轴构件3产生朝向轴向(X1-X2方向)的推力。也就是说,在使轴构件3一边旋转一边进行冲程的构造中,在使轴构件3的第一活塞杆5向前方突出的情况下,通过从第二旋转用端口73供给流体,并从第一旋转用端口72排出流体,能够使轴构件3产生朝向前方(X1)的推力。另外,在将轴构件3的第一活塞杆5向后方拉入的情况下,通过从第一旋转用端口72供给流体,并从第二旋转用端口73排出流体,能够使轴构件3产生朝向后方(X2)的推力。因此,在第二实施方式中,能够随着旋转而产生朝向前后方向的推力,并且能够辅助轴构件3朝向前后方向的移动。
在第一实施方式以及第二实施方式两者中,优选轴构件3能够进行冲程地被支承。由此,能够使轴构件3一边旋转一边进行冲程。
另外,优选的是,在气缸本体2、62内划分出具备气缸室15的冲程机构部10和旋转机构部9、69,在所述冲程机构部10上设置有连通于气缸室15的冲程用端口25、26。由此,能够制造如下气缸装置1、61,其能够抑制供给至冲程机构部10的气缸室15的流体与供给至旋转机构部9、69的旋转室9d、69d的流体相互干扰,并能够以简单的构造使轴构件3一边旋转一边进行冲程。作用于冲程机构部10的流体与作用于旋转机构部9、69的流体既可以相同也可以不同。例如能够使压缩空气作用于冲程机构部10与旋转机构部9、69两者。
另外,在本实施方式中,优选的是,轴构件3具备流体轴承,且轴构件3在气缸本体内以漂浮的状态被支承。由此,能够减少冲程以及旋转时的滑动阻力,能够进行高精度的冲程以及旋转。流体轴承优选使用空气轴承。
此外,本发明并不限定于上述实施方式,能够进行各种变更来实施。在上述的实施方式中,随附附图中所图示的大小和形状等并不限定于此,在发挥本发明的效果的范围内能够进行适当变更。此外,只要不脱离本发明的目的范围便能够进行适当变更来实施。
例如,传感器50的位置并不限定于图3和图9等的配置,也可以以能够直接测定第一活塞杆5的位置的方式配置传感器50。
然而,通过将传感器50配置于形成在第二活塞杆6的后端的孔8内,能够轻易地使传感器50以不接触方式配置于第二活塞杆6,同时能够促进小型化,并且能够使位置测定以及旋转测定的精度提高。
气缸本体2、62既可以通过将分割成多个的部分组装而形成,也可以一体化形成。
此外,气缸本体2、62和轴构件3例如由铝合金等形成,但并未限定材质,能够根据使用用途和设置场所等进行各种变更。
如上所述,在本实施方式中,作为气缸装置1、61,不仅为空气轴承式气缸,也能够通过空气以外的流体的作用来驱动,例如可例示油压气缸。
(产业上的可利用性)
根据本发明,能够实现一种气缸装置,其能够谋求减少电力消耗以及小型化,并且能够抑制旋转不均匀。在本发明中,无论是仅能够旋转的气缸装置,亦或是能够进行旋转且冲程的气缸装置,可任意选择。在本发明中,能够获得优异的旋转精度和旋转冲程精度。这样,通过将本发明的气缸装置应用于要求高旋转精度和旋转冲程精度的用途等,能够获得高精度,同时能够促进消耗电力的减少且小型化。
本申请基于2018年12月5日申请的日本特愿2018-227979号。其内容全部引入本文。
- 用于为气缸曲轴箱的气缸工作面涂层的方法、具有被涂层的气缸工作面的气缸曲轴箱以及发动机
- 铸造有气缸套的气缸体结构、制造气缸体的方法以及在该方法中铸造的气缸套