一种脉动衰减器主被动一体化系统及多频振动抑制方法
文献发布时间:2023-06-19 12:10:19
技术领域
本发明涉及液压系统压力脉动控制领域,特别涉及一种脉动衰减器主被动一体化系统及多频振动抑制方法。
背景技术
为了解决液压柱塞泵转子系统多频振动的问题,工程上通常认为流体脉动是振动的主要来源之一,对其振动靶向抑制需要提出一种合适的流体脉动主被动一体化消振方法,结合主被动控制的优点(即主动滤波衰减低频脉动,被动滤波衰减中、高频脉动),才能有效削弱宽频带内的脉动和振动。
发明内容
本发明的目的是提供一种脉动衰减器主被动一体化系统及多频振动抑制方法,以解决背景技术中所提出的问题。
为了达到上述目的,本发明提供了一种脉动衰减器主被动一体化系统,包括有流体脉动衰减器,在该流体脉动衰减器腔内的内周壁上设置有用于采集其腔内多频振动信号的特征信息的PVDF压电层;还包括有:
并联负电容压电分流阻尼电路,该并联负电容压电分流阻尼电路并联在流体脉动衰减器内的PVDF压电层,且通过调节该并联负电容压电分流阻尼电路的电路参数,使谐振频率与脉动波的对应频率相匹配,从而控制系统的振动响应,实现流体激振的主被动一体化控制;
电荷放大电路,该电荷放大电路与流体脉动衰减器内的PVDF压电层相连,以将电荷信号转化成电压信号;
控制器,该控制器分别与并联负电容压电分流阻尼电路和电荷放大电路相连,且该控制器接收自电荷放大电路传递的电压信号,来控制并联负电容压电分流阻尼电路进行电路参数的调节。
进一步设置是:所述的流体脉动衰减器还包括有设置在其腔内的仿生薄膜结构,所述的仿生薄膜结构由多个仿生单元和固定骨架组成,各所述的仿生单元的两端固定在固定骨架上,各所述的仿生单元各自振动相互独立,且各所述的仿生单元之间设置有阻尼缝隙孔,以供液体流动从而起到阻尼作用。
进一步设置是:各所述的仿生单元分别为长度各异的弹性膜片,且各所述的仿生单元按规则排列,所述的固定骨架包括有两片中间开梯形窗口的刚性夹板,通过螺栓将各安装在刚性夹板的梯形窗口内的各仿生单元夹紧固定,并使各仿生单元沿纵向张紧。
进一步设置是:所述的并联负电容压电分流阻尼电路包括有负电容电路、可调电阻和可调电容,所述的负电容电路与可调电阻和可调电容相连,通过该负电容电路来抵消压电片容抗,其控制效果与频率无关,从而有效屏蔽外界环境干扰。
进一步设置是:所述的负电容电路包括有运放、电阻R1、可变电阻R2和电容Cg,该负电容电路的等效负电容值C为C=-R
进一步设置是:在所述的并联负电容压电分流阻尼电路与控制器之间连接有D/A转换模块,在所述的电荷放大电路与控制器之间连接有A/D转换模块。
进一步设置是:还包括有加速度传感器和误差压力传感器,来分别获取与所述的流体脉动衰减器相连的泵进出口处的振动量和瞬时压力参数。
本发明还提供了一种多频振动抑制方法,包括有以下步骤:
通过流体脉动衰减器对流经其腔内的流体进行被动衰减;
流体脉动衰减器腔内的PVDF压电层将被动衰减后的多频振动信号的特征信息进行采集;
电荷放大电路对采集的多频振动信号的特征信息进行处理,将电荷信号转化成电压信号;
通过A/D转换模块将电荷放大电路输出的电压信号转换成数字信号;
控制器接收A/D转换模块输出的数字信号并进行处理,经D/A转换模块后对并联负电容压电分流阻尼电路的电路参数进行不断地调整,使谐振频率与脉动波的对应频率相匹配,从而控制系统的振动响应,实现流体激振的主被动一体化控制。
进一步设置是,控制器接收A/D转换模块输出的数字信号并进行处理包括有以下步骤:
控制器接收A/D转换模块输出的数字信号,并将数字信号对应的压力脉动数据进行FFT变换,得到压力振动频谱,选择基频作为要进行脉动衰减的成分;
采用自适应前馈x滤波最小均方算法,将误差压力传感器所测的衰减后的压力脉动量大小作为控制目标,对并联负电容压电分流阻尼电路内的可调电阻和可调电容的值进行不断地调整,直到误差压力传感器测量到的压力脉动最小。
本发明的有益效果在于:
本发明结合主被动控制的优点(即主动滤波衰减低频脉动,被动滤波衰减中、高频脉动),有效削弱宽频带内的脉动和振动,起到对柱塞泵转子系统多频流体激振的抑制效果。
以下结合实施例进一步阐述有益效果。
附图说明
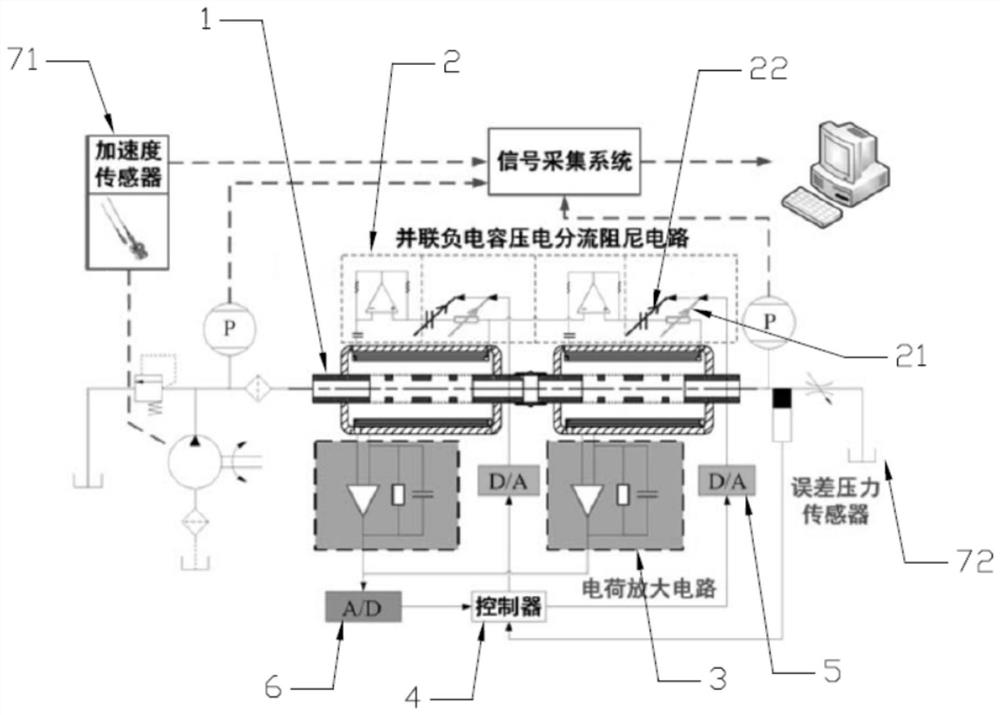
图1为实施例的整体结构示意图;
图2为实施例中流体脉动衰减器的结构示意图;
图3为实施例中仿生薄膜结构的结构示意图;
图4为实施例中并联负电容压电分流阻尼电路振动控制的原理图;
图5为实施例中负电容构造电路;
图6为实施例中控制器的原理图;
图7为实施例中小波变换域LMS算法原理图;
图8为实施例中基于db4小波的LMS算法流程图。
图中:1、流体脉动衰减器;11、PVDF压电层;12、入口;13、出口;14、仿生薄膜结构;141、固定骨架;142、仿生单元;143、阻尼缝隙孔;2、并联负电容压电分流阻尼电路;21、可调电阻;22、可调电容;3、电荷放大电路;4、控制器;5、D/A转换模块;6、A/D转换模块;71、加速度传感器;72、误差压力传感器。
具体实施方式
以下结合附图对本发明作进一步详细说明。
如附图1至8所示,本实施例公开了一种脉动衰减器主被动一体化系统,包括有流体脉动衰减器1,流体脉动衰减器1具有入口12和出口13;在该流体脉动衰减器1腔内的内周壁上设置有用于采集其腔内多频振动信号的特征信息的PVDF压电层11;还包括有:
并联负电容压电分流阻尼电路2,该并联负电容压电分流阻尼电路2并联在流体脉动衰减器1内的PVDF压电层11,且通过调节该并联负电容压电分流阻尼电路2的电路参数,使谐振频率与脉动波的对应频率相匹配,从而控制系统的振动响应,实现流体激振的主被动一体化控制;
电荷放大电路3,该电荷放大电路3与流体脉动衰减器1内的PVDF压电层11相连,以将电荷信号转化成电压信号;
控制器4,该控制器4分别与并联负电容压电分流阻尼电路2和电荷放大电路3相连,且该控制器4接收自电荷放大电路3传递的电压信号,来控制并联负电容压电分流阻尼电路2进行电路参数的调节。
流体脉动衰减器(1)还包括有设置在其腔内的仿生薄膜结构14,仿生薄膜结构14由多个仿生单元142和固定骨架141组成,各仿生单元142的两端固定在固定骨架141上,各仿生单元142各自振动相互独立,且各仿生单元142之间设置有阻尼缝隙孔143,以供液体流动从而起到阻尼作用。
各仿生单元142分别为长度各异的弹性膜片,且各仿生单元142按规则排列,固定骨架141包括有两片中间开梯形窗口的刚性夹板,通过螺栓将各安装在刚性夹板的梯形窗口内的各仿生单元142夹紧固定,并使各仿生单元142沿纵向张紧。
在本实施例中,每个仿生单元142都可以看作是一个谐振器。周期性脉动压力持续作用在位于主油路与共振腔之间的仿生单元142时,仿生单元142则按脉动衰减频率做周期性振动,与流体发生耦合作用,产生附加质量,间隙之间的流体流动产生阻尼,形成一个受迫振动系统。
其中,的并联负电容压电分流阻尼电路2包括有负电容电路、可调电阻21和可调电容22,负电容电路与可调电阻21和可调电容22相连,通过该负电容电路来抵消压电片容抗,其控制效果与频率无关,从而有效屏蔽外界环境干扰。
负电容电路包括有运放、电阻R1、可变电阻R2和电容Cg,该负电容电路的等效负电容值C为C=-R
对于宽频带振动控制,在本实施中是一个比较好的控制方法,它的控制原理是构造一个负电容电路来抵消压电片的容,从而增大机电耦合系数,其控制原理和构造电路分别如图4和5所示。由图4可知,负电容压电分流阻尼电路振动控制的原理是用一个负的容抗来抵消压电片容抗,因此控制效果与频率无关,不易受外界环境干扰,只用一个压电片就能控制多阶模态。负电容不仅具有传统阻尼电路的优点,还极大地拓宽了阻尼频率,这给实际工程应用带来了极大的方便。
其中,在并联负电容压电分流阻尼电路2与控制器4之间连接有D/A转换模块5,在所述的电荷放大电路3与控制器4之间连接有A/D转换模块6。
其中,还包括有加速度传感器71和误差压力传感器72,来分别获取与流体脉动衰减器1相连的泵进出口处的振动量和瞬时压力参数。
本实施例还公开了一种多频振动抑制方法,包括有以下步骤:
通过流体脉动衰减器1对流经其腔内的流体进行被动衰减;
流体脉动衰减器1腔内的PVDF压电层11将被动衰减后的多频振动信号的特征信息进行采集;
电荷放大电路3对采集的多频振动信号的特征信息进行处理,将电荷信号转化成电压信号;
通过A/D转换模块6将电荷放大电路3输出的电压信号转换成数字信号;
控制器4接收A/D转换模块6输出的数字信号并进行处理,经D/A转换模块5后对并联负电容压电分流阻尼电路2的电路参数进行不断地调整,使谐振频率与脉动波的对应频率相匹配,从而控制系统的振动响应,实现流体激振的主被动一体化控制。
其中,控制器4接收A/D转换模块6输出的数字信号并进行处理包括有以下步骤:
控制器4接收A/D转换模块6输出的数字信号,并将数字信号对应的压力脉动数据进行FFT变换,得到压力振动频谱,选择基频作为要进行脉动衰减的成分;
采用自适应前馈x滤波最小均方算法,将误差压力传感器72所测的衰减后的压力脉动量大小作为控制目标,对并联负电容压电分流阻尼电路2内的可调电阻21和可调电容22的值进行不断地调整,直到误差压力传感器72测量到的压力脉动最小。
另外,在振动主动控制领域,基于最速下降原理的以最小均方误差为准则(LMS)算法的线性横向滤波器,因算法易于实现和计算量小在实际中经常被采用。但是由于LMS算法收敛速度和稳定性主要取决于系统输入信号自相关矩阵,当自相关矩阵为病态矩阵时,LMS算法的收敛速度会大大降低,甚至会出现发散的情况,因而其应用受到了限制。
小波变换作为时频分析联合方法,通过尺度的伸缩与平移,可实现信号的时频分解与定位,具有较好的去相关能力。本实施例把小波分析理论和LMS算法结合起来,采用了分解LMS算法对板结构进行自适应主动振动控制,通过离散小波变换域的LMS算法的主动振动的原理,为提高小波自适应算法的实时性,采用了MALLAT高效算法;最后通过仿真和实验验证了小波变换域的LMS自适应算法的有效性。
为了更好地调节压控电荷源的控制电压,采用小波变换域LMS控制器,其原理图如附图7所示。小波变换的方法是对自适应滤波器的输入信号进行正交变换将输入向量正交分解到多尺度空间,利用小波的时频局部特性可以减小输入向量自相关阵的相关性,大大增加了算法的收敛步长,从而提高LMS算法的收敛速度和稳态性能。
在附图7中,V
在式(1)中,
式(1)为输入信号向量V
因此压控电荷源的控制电压为:
V
自适应滤波器权值更新方式为:
W
其中,μ为收敛步长。具体应用为:首先,柱塞泵脉动流量经过流体脉动衰减器1对脉动波进行一定程度的被动衰减,并通过PVDF压电层11(压电薄膜)将被动衰减作用后的脉动波电荷信号进行采集,经过电荷放大电路3处理之后,将电荷信号转化成电压信号。输出的电压信号再通过A/D转换模块6转化成控制器4的数字信号,控制器4(如附图3)对采集到的压力脉动数据进行FFT变换,得到压力振动频谱,选择基频作为要进行脉动衰减的成分。最后,采用自适应前馈x滤波最小均方(Filtered-x least mean square,FxLMS)算法,将误差压力传感器72所测的衰减后的压力脉动量大小作为控制目标,对并联负电容压电分流阻尼电路2的电路参数(可调电阻21与可调电容22值)进行不断地调整,使压电系统的谐振频率与脉动波的某个频率相一致,从而控制液压柱塞泵的振动响应,直到误差压力传感器72测量到的压力脉动最小,实现流体脉动的主被动一体化控制。在此基础上,通过加速度传感器71、误差压力传感器72和负电容电路73分别获取泵进出口处的振动量、瞬时压力和负电容分支电路参数(电容值和电阻值),建立振动抑制效果、流体脉动衰减性能和负电容分支电路参数三者之间的内在关联。
本具体实施例仅仅是对本发明的解释,其并不是对本发明的限制,本领域技术人员在阅读完本说明书后可以根据需要对本实施例做出没有创造性贡献的修改,但只要在本发明的权利要求范围内都受到专利法的保护。
- 一种脉动衰减器主被动一体化系统及多频振动抑制方法
- 一种主动与被动控制协同作用的立管振动抑制装置及方法