一种坞壁车无组织排放废气收集系统
文献发布时间:2023-06-19 12:11:54
技术领域
本发明涉及环保领域,具体涉及一种坞壁车无组织排放废气收集系统。
背景技术
对大型船舶船体外部喷漆时,只是一个简单的坞壁车提供作业的平台,针对喷漆过程中产生的漆雾及VOCs气体,现有的坞壁车上并没有收集装置。因为大型船舶喷漆需露天作业,喷漆时的废气很难收集。如果建设密封的喷漆房造价太高并且在船坞内无法实现。同时坞壁车动作是通过工作台上的人员与操作室的人员沟通后操作,效率低且容易与所需喷漆构件发生碰撞,设备安全性无法保障。目前船舶修造喷漆行业露天作业,给复杂环境下人员的使用提出了选择难题。
发明内容
有鉴于此,本发明提供了一种坞壁车无组织排放废气收集系统,能够收集喷漆时所产生的废气。
本发明采用的技术方案如下:
一种坞壁车无组织排放废气收集系统,所述废气收集系统包括收集罩、伸缩罩、风机、防撞杆、液压旋转平台、传感器及电控系统;
所述收集罩固定在伸缩罩前端,伸缩罩安装在外部坞壁车工作斗上,工作斗固定在液压旋转平台上;所述工作斗上设有防撞杆,且防撞杆边沿距工作斗的水平距离小于伸缩罩的最大伸出距离,当受到超过设定阈值的撞击力,所述防撞杆连锁坞壁车驾驶室停机;所述传感器设置在收集罩四周,用于测量收集罩与船面之间的距离并传输给电控系统;所述电控系统根据传感器传输的距离通过液压旋转平台调整收集罩贴合面的角度以及伸缩罩的伸出长度,使收集罩贴合面与船面保持平行;所述风机与收集罩连通,在收集罩内产生负压,当所述收集罩贴合面与船面贴合后,风机工作,收集罩收集废气。
进一步地,所述废气收集系统还包括万向轮,采用两个,分别设置在收集罩的左上角和右上角。
进一步地,所述万向轮为定距万向轮,通过插销调整所述定距万向轮滚轮的伸出距离。
进一步地,所述废气收集系统处于非工作状态下,所述收集罩处于倾斜状态,收集罩下端向外伸出。
进一步地,所述废气收集系统还包括拉线式位移传感器,用于测量坞壁车自身摆动角度,反馈给电控系统确定液压旋转平台的旋转角度。
进一步地,当坞壁车驾驶员将工作斗移动至指定作业面后,所述电控系统控制包括两种工作模式,一种是全自动模式,作业人员按下全自动模式按键,废气收集系统自主完成伸缩罩推出、收集罩角度调整及与船面贴合;另一种是手动模式,作业人员按下手动模式按键,通过旋转旋钮来完成伸缩罩推出、收集罩角度调整及与船面贴合。
进一步地,所述工作斗上设有防护栏,所述防护栏上设置插销,控制防护栏的开闭。
进一步地,所述伸缩罩由可折叠式橡胶制成。
有益效果:
1、本发明将喷漆时产生的VOCs气体与漆雾收集起来,后续经过处理、净化后排放,有效的解决了环境污染问题,实现保护环境的目标。收集罩工作全程贴合喷漆面,收集效率高,可去除大部分喷漆时产生的漆雾与VOCs气体,出口排放符合无组织排放要求;根据不同作业方式,收集罩可伸出或退回,方便作业人员作业。其次,工作斗外设有防撞杆,连锁坞壁车操作系统,与船体碰撞时坞壁车停机,保证安全的同时实现高效运行。该废气收集系统可实现多种场景下的通用性。
2、本发明非工作状态下,收集罩处于倾斜状态,收集罩下端向外伸出,使得布置在收集罩下端的传感器先感应,可以由两点确定收集罩贴合面并进行角度调整,然后再与收集罩上的其他传感器协同调节,精度高。
3、本发明通过设置拉线式位移传感器,能够更精确地测量出坞壁车伸缩液压杆的摆动角度,以对收集罩贴合面进行粗调整。
4、本发明电控系统控制包括两种工作模式,操作使用完全符合原坞壁车驾驶员与作业人员的操作习惯,可以只需一键即可全自动调整,完成准备工作,也可在出现非平整面喷漆作业时,进行手动调整。
附图说明
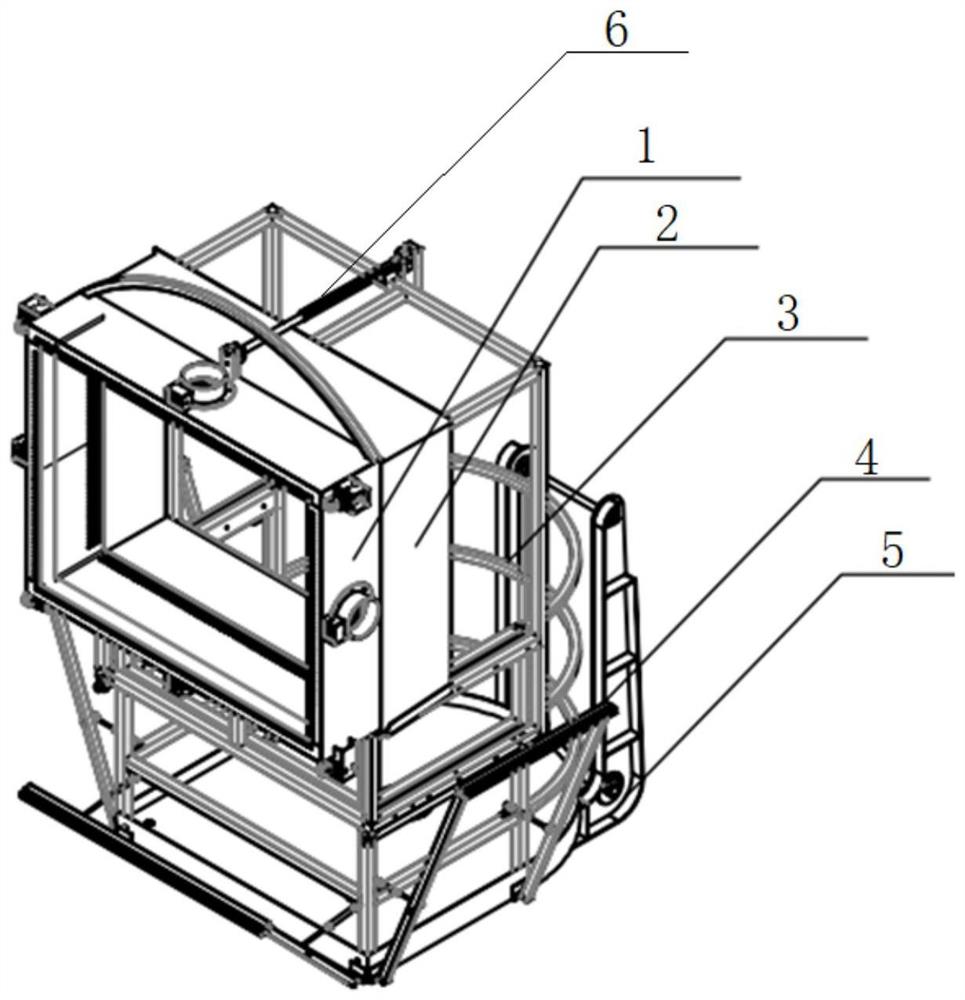
图1为本发明整体结构示意图。
图2为液压旋转平台的三视图。
图3(a)、图3(b)、图3(c)分别为定距万向轮的立体结构示意图、仰视图、侧视图。
图4(a)、图4(b)分别为本发明处于非工作状态、工作状态下的示意图。
其中,1-收集罩,2-伸缩罩,3-防护栏,4-防撞杆,5-液压旋转平台,6-伸缩杆,7-旋转盘,8-支撑座,9-定距万向轮,10-插销。
具体实施方式
下面结合附图并举实施例,对本发明进行详细描述。
本发明提供了一种坞壁车无组织排放废气收集系统,如图1所示,包括收集罩1、伸缩罩2、风机、防撞杆4、防护栏3、液压旋转平台5、电感式传感器、拉线式位移传感器及电控系统。
收集罩1通过与平整的船面进行贴合,作用类似于侧吸收集罩,通过贴合面设置的孔板式收集网对废气进行收集。收集罩1四周设有电感式传感器,用于测量收集罩1与船面之间的距离并传输给电控系统,确保收集罩1与船面贴合,达到可以最大效率收集漆雾与VOCs气体的作用。收集罩1与风机通过管路连通,风机设置在坞壁车上。在风机的作用下收集罩1内产生负压,当收集罩1贴合面与船面贴合后,风机开始工作,收集罩1收集废气。
收集罩1固定在伸缩罩2前端,伸缩罩2由可折叠式橡胶制成,当收集罩1伸出时,伸缩罩2展开;当收集罩1收回时,伸缩罩2折叠收起。并可以根据坞壁车工作斗距船面的距离实时调节伸缩距离,满足紧密贴合的要求,同时起到半密闭空间收集的效果。
伸缩罩2通过支架安装在外部坞壁车工作斗上,工作斗固定在液压旋转平台5上,液压旋转平台5是整套设备的动力系统,并起到支撑工作斗的作用,是收集系统与坞壁车连接的枢纽。
如图2所示,液压旋转平台5包括液压传动系统、旋转盘7、伸缩杆6及支撑座8;旋转盘7固定在支撑座8上,旋转盘7的最大旋转范围是-135~135°。伸缩杆6一端由液压传动系统驱动,另一端与收集罩1固连,用于带动收集罩1伸出或退回。液压传动系统连接外部液压源为整套废气收集系统提供动力。
工作斗上设有防撞杆4,分别设置在工作斗的前面、左面和右面,且防撞杆4边沿距工作斗的水平距离小于伸缩罩2的最大伸出距离,当收集罩1通过坞壁车进行移动、旋转时,保护废气收集系统不与船体发生碰撞。当防撞杆4受到超过设定阈值的撞击力,防撞杆4连锁坞壁车驾驶室停机。工作斗上还设有防护栏3,避免高空作业时人员出现跌落危险。防护栏3上设置插销,控制防护栏3的开闭,方便作业人员上下。
拉线式位移传感器设置在坞壁车上,与坞壁车自身摆动连锁,测量坞壁车自身摆动角度,由坞壁车水平摆动幅度确定旋转盘7旋转范围反馈给电控系统,用于确定工作斗在移动到指定作业面过程中液压旋转平台5旋转盘7的旋转角度,进行粗调。之后再根据电感式传感器的测量数据进行精调,电控系统根据电感式传感器传输的距离通过液压旋转平台5调整收集罩1贴合面的角度以及伸缩罩2的伸出长度,使收集罩1贴合面与船面保持平行。
优选地,废气收集系统还包括定距万向轮9,采用两个,分别活动连接在收集罩1的左上角和右上角。未使用时,定距万向轮9180°翻转贴合在收集罩1侧面,使用时,定距万向轮9反向180°翻转伸出收集罩1端面。如图3(a)、图3(b)、图3(c)所示,通过插销10可以调整定距万向轮9滚轮的伸出距离,即通过插销10可以调节收集罩1与船面的贴合程度,最小贴合距离为定距万向轮9滚轮伸出收集罩1的距离,确保喷漆时对漆雾的收集效率,同时能够避免收集罩1的移动对船面造成划伤。伸出距离为10mm或25mm,两档可调节。
如图4(a)、图4(b)所示,废气收集系统处于非工作状态下,收集罩1处于倾斜状态,收集罩1下端向外伸出。本实施例中,收集罩1下端与竖直面夹角为15°。电感式传感器最大测量距离为50cm,采用四个,分布在收集罩1四个角,由于收集罩1下端向外伸出,则伸缩罩2伸出时下端的两个电感式传感器先感应,可以由两点确定收集罩1贴合面并进行角度调整,然后再与收集罩1上的另外两个电感式传感器协同调节,最终完成收集罩1贴合船面的全自动操作。工作状态下,根据坞壁车与船体的实际距离,收集罩1会向前推出,最大的伸出距离为700mm。
电控系统控制包括两种工作模式,一种是全自动模式,另一种是手动模式。坞壁车驾驶员将工作斗移动至指定作业面的过程中,根据拉线式位移传感器测得的坞壁车水平摆动幅度确定旋转盘7的旋转范围,调整旋转盘7的转动角度,使得收集罩1贴合面与船面保持水平进行粗对准。当坞壁车驾驶员将工作斗移动至指定作业面后,作业人员按下全自动模式按键开启全自动模式,废气收集系统自主完成伸缩罩2推出、收集罩1角度调整及与船面贴合;当出现非平整面喷漆作业时,可开启手动模式,作业人员按下手动模式按键,通过旋转旋钮来完成伸缩罩2推出、收集罩1角度调整及与船面贴合。
收集罩1通过定距万向轮9与船面贴合后,风机开始工作,在收集罩1内产生负压,收集罩1收集废气,经过处理、净化后排放。
综上所述,以上仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种坞壁车无组织排放废气收集系统
- 一种坞壁车无组织排放废气收集系统