工程机械的回转驱动装置
文献发布时间:2023-06-19 12:16:29
技术领域
本发明涉及设置于液压挖掘机等工程机械的回转驱动装置。
背景技术
具备回转体的工程机械上搭载有用于使该回转体回转的回转驱动装置。例如,液压挖掘机上搭载有利用液压来使上部回转体回转的驱动装置,该驱动装置包含喷出工作油的液压泵、以及接受该工作油的供给来使所述上部回转体回转的液压马达(回转马达)。上述的回转驱动装置中,如何使具有较大的转动惯量的所述上部回转体高效地回转是重要的技术问题。
例如,专利文献1中公开了为了提高驱动效率而进行抑制溢流损失的溢流截止控制的驱动装置。所述溢流截止控制是以一边将流过溢流阀的工作油的流量即溢流流量抑制为最小限度一边确保使回转体回转所需的流量的方式对容量可变型液压泵的容量进行操作的控制。具体而言,在该溢流截止控制时,将最小溢流流量和回转速度流量之和计算为目标泵流量,并决定所述液压泵的泵容量以获得与该目标泵流量相等的泵流量。所述最小溢流流量是为了确保驱动回转体所需的安全压而必需的最低限度的溢流流量,所述回转速度流量是回转马达驱动回转体进行回转时该回转马达中实际流过的工作油的流量即与回转速度相对应的流量。
在进行上述溢流截止控制的装置中,由于所述容量可变型液压泵的特性,存在回转启动时难以确保符合操作人员要求的回转加速性的问题。具体而言,所述容量可变型液压泵具有泵容量越大(例如倾角越大)所得到的的容积效率ηv越高的特性,而在所述溢流截止控制时,由于回转速度为0或者极低速度的回转启动时的泵容量被控制在为了确保规定的安全压所需的最低限度的泵容量所对应的容量、或是接近于此的小容量,因此,在回转启动时无法获得高容积效率。从而导致实际的泵压升至回转体启动所需的压力需要耗费时间。
所述容积效率ηv是液压泵的实际喷出流量Q与理论喷出流量Qth之比(ηv=Q/Qth),该理论喷出流量Qth用设定的倾角所对应的挤压容积V与泵转速(例如发动机转速)N之积来表示(Qth=V×N)。所述理论喷出流量Qth与实际喷出流量Q之差对应于泵内部的漏泄导致的损耗。
现有技术文献
专利文献
专利文献1:日本发明公开公报特开2016-31125。
发明内容
本发明的目的在于提供一种利用液压使工程机械所包含的回转体进行回转的回转驱动装置,能够抑制溢流损失,并且确保回转启动时有很高的加速性。
提供一种工程机械的回转驱动装置,设置于工程机械,该工程机械包括机体、可回转地搭载于该机体的回转体、以及生成用于驱动该回转体的动力的发动机,所述回转驱动装置利用液压使所述回转体进行回转,包括:液压泵,是容量可变型的液压泵,由所述发动机驱动而喷出工作油;回转马达,由液压马达构成,通过接受来自所述液压泵的工作油的供给而以使所述回转体回转的方式进行工作;回转控制装置,通过接收回转指令操作来允许从所述液压泵向所述回转马达供给工作油,从而使所述回转体进行回转;溢流阀,设置在用于使从所述液压泵喷出的工作油释放至箱体的溢流流路中,以将供给至所述回转马达的工作油的压力即泵压限制在预先设定的设定压以下的压力的方式进行开阀;回转速度检测器,检测所述回转体的回转速度;以及,流量控制装置,在所述回转控制装置被施加了所述回转指令操作时,使所述液压泵的容量即泵容量变化,从而控制从该液压泵喷出的工作油的流量即泵流量。所述流量控制装置包含:回转速度流量计算部,计算在所述回转体进行回转时对应于所述回转速度检测器检测到的所述回转速度而向所述回转马达流入的工作油的流量即回转速度流量;溢流截止控制用目标泵流量计算部,基于最小溢流流量和所述回转速度流量之和来计算所述泵流量的目标值即溢流截止控制用目标泵流量,该最小溢流流量是在所述溢流阀流过的工作油的流量,即,使所述溢流阀开阀而确保使所述回转体启动所需的所述泵压而所需的最低限度的溢流流量;以及,泵容量指令部,向所述液压泵输入泵容量指令,该指令以能够获得所述溢流截止控制用目标泵流量计算部计算出的所述溢流截止控制用目标泵流量的方式使所述泵容量变化,所述溢流截止控制用目标泵流量计算部和所述泵容量指令部,在所述回转控制装置被施加了所述回转指令操作且所述回转速度小于预先设定的设定回转速度的回转启动时,使所述泵容量增大至比对应于所述最小溢流流量与所述回转速度流量之和的泵容量大。
附图说明
图1是表示本发明的实施方式所涉及的工程机械即液压挖掘机的侧视图。
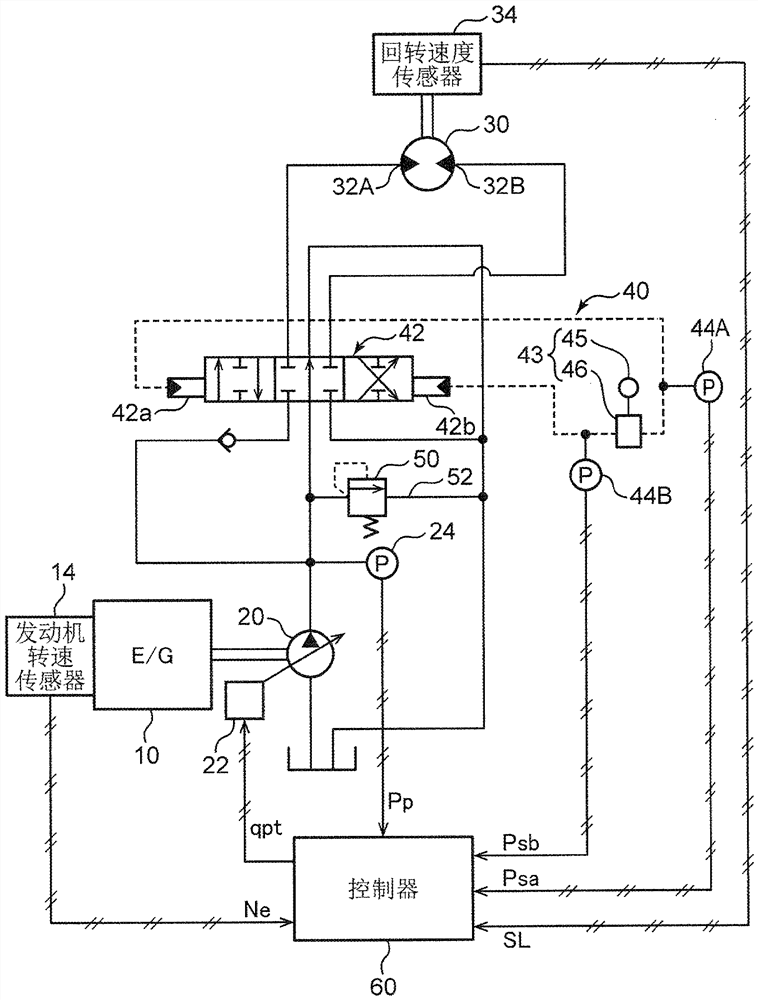
图2是表示所述液压挖掘机上搭载的回转驱动装置的回路图。
图3是表示所述回转驱动装置中包含的控制器的功能结构的框图。
图4表示图3的控制器执行的运算控制动作的流程图。
具体实施方式
参照附图对本发明的较佳实施方式进行说明。
图1表示本发明的实施方式所涉及的工程机械即液压挖掘机。该液压挖掘机包括:作为机体的下部行走体1;搭载在该下部行走体1上且能绕着回转轴X进行回转的回转体即上部回转体2;以及安装在该上部回转体2上的作业附属装置附属装置3。
所述作业附属装置3包括动臂4、斗杆5、铲斗6、多个能够伸缩的液压缸即动臂缸7、斗杆缸8和铲斗缸9。所述动臂4具有与所述上部回转体2连结从而能够沿起伏方向转动的基端部和其相反侧的远端部。所述斗杆5具有可转动地连结于所述动臂4的远端部的基端部和其相反侧的远端部,该斗杆5的远端部上安装有可转动的所述铲斗6。所述动臂缸7设置在所述动臂4与所述上部回转体2之间,使该动臂4随着所述动臂缸7的伸缩动作而起伏。同样,所述斗杆缸8设置在所述动臂4与所述斗杆5之间,使所述斗杆5随着所述斗杆缸8的伸缩动作而转动,所述铲斗缸9设置在所述斗杆5与所述铲斗6之间,使所述铲斗6随着所述铲斗缸9的伸缩动作而转动。
图2是表示本实施方式所涉及的回转驱动装置的回路图。该回转驱动装置是以所述液压挖掘机上搭载的发动机10为动力源,利用液压使所述上部回转体2相对于所述下部行走体1进行回转的装置,包括液压泵20、回转马达30、回转控制装置40、溢流阀50、多个传感器和控制器60。
所述液压泵20与所述发动机10的输出轴连结,在该发动机10的驱动下吸入、喷出箱体内的工作油。该液压泵20是容量可变型的泵。具体而言,该液压泵20包括:构成为容量可调节的泵体;以及附加设置于其上的泵调节器22。所述泵调节器22从所述控制器60接收到泵容量指令信号的输入时进行工作,以使所述泵体的容量即泵容量发生变化。所述泵容量指令是用于指定目标泵容量qpt的信号,所述泵调节器22操作所述泵体,以使实际泵容量达到目标泵容量qpt。
所述回转马达30是从所述液压泵20接受工作油的供给而进行工作以使所述回转体回转的液压马达。具体而言,该回转马达30包括与所述上部回转体2连结的输出轴、以及接受所述工作油的供给而使所述输出轴旋转的马达主体。该回转马达30具有右回转端口32A和左回转端口32B。该回转马达30在所述右回转端口32A接收到工作油的供给时,使所述上部回转体2向右回转的同时,从所述左回转端口32B排出工作油,反之,在所述左回转端口32B接收到工作油的供给时,使所述上部回转体2向左回转的同时,从所述右回转端口32A排出工作油。该回转马达30使所述上部回转体2以与该回转马达30中流过的工作油的流量相对应的速度进行回转。
所述回转控制装置40接收到操作人员作出的回转指令操作时,允许所述液压泵向所述回转马达供给工作油,从而使所述回转体进行回转。本实施方式所涉及的所述回转控制装置40具有回转控制阀42和回转操作阀43。
所述回转控制阀42设置在所述液压泵20与所述回转马达30之间,并进行工作以切换该液压泵20向该液压马达30供给工作油的方向,并且使该工作油的流量发生变化。
图2所示的所述回转控制阀42由具有右回转先导端口42a和左回转先导端口42b的先导操作式的方向切换阀构成。该回转控制阀42在所述右回转先导端口42a、左回转先导端口42b都没有输入先导压时,保持中央位置(图2中的中央位置),将所述液压泵20与所述回转马达30之间阻断。当向所述右回转先导端口42a输入了先导压(右回转先导压)时,该回转控制阀42以与该先导压的大小相对应的冲程进行开阀,从所述中立状态切换到右回转状态(图2中的左边位置)。即,以允许从所述液压泵20喷出的工作油以与所述先导压的大小相对应的流量提供给所述回转马达30的所述右回转端口32A的方式进行开阀。反之,当向所述左回转先导端口42b输入了先导压(左回转先导压)时,该回转控制阀42以与该先导压的大小相对应的冲程进行开阀,从所述中立状态切换至左回转状态(图2中的右边位置)。即,以允许从所述液压泵20喷出的工作油以与所述先导压的大小相对应的流量提供给所述回转马达30的所述左回转端口32B的方式进行开阀。
所述回转操作阀43构成在接收到所述回转指令操作时将与该回转指令操作相对应的先导压施加到所述回转控制阀42上并使其进行工作的回转操作装置。具体而言,该回转操作阀43具有回转操作杆45和回转先导阀46。
所述回转操作杆45是设置在所述上部回转体2所包含的驾驶室内的操作构件。该回转操作杆45与所述回转先导阀46连结,通过接受操作人员进行的回转指令操作、例如使该回转操作杆45倾倒的操作,以使该回转先导阀46与该倾倒联动地进行开阀。
所述回转先导阀46设置在未图示的先导液压源(例如由所述发动机10驱动的先导泵)与所述回转控制阀42的所述右回转先导端口42a、左回转先导端口42b之间,对应于所述回转操作杆45上施加的所述回转指令操作进行开阀,从而允许所述先导液压源向所述右回转先导端口42a、左回转先导端口42b中的任一个供给先导压。具体而言,该回转先导阀46在所述回转操作杆45被施加了所述回转指令操作时开阀,以允许向所述右回转先导端口42a、左回转先导端口42b中与所述回转指令操作的方向相对应的先导端口供给与该回转指令操作的大小相对应的先导压。
所述溢流阀50设置在溢流流路52中,以使该溢流流路52开闭的方式进行工作。所述溢流流路52是将泵管线与箱管线直接连接的流路,从而使所述液压泵20喷出的工作油从所述回转控制阀42旁通而释放至箱体。所述溢流阀50以将所述液压泵20喷出的工作油的压力即泵压Pp限制在预先设定的溢流设定压Prf以下的压力的方式进行开阀。具体而言,该溢流阀50的一次压(即所述泵压Pp)在所述溢流设定压Prf以上的时刻开至最大开度,使所述溢流流路52以最大开口面积开通,从而对超过所述溢流设定压Prf的所述泵压Pp的上升进行限制。
所述控制器60由具有运算控制功能的例如微型计算机构成,作为本发明的流量控制装置发挥作用。具体而言,该控制器60具有在所述回转操作阀43被施加了所述回转指令操作时,改变所述液压泵20的容量即泵容量qp,从而控制从该液压泵20喷出的工作油的流量即泵流量Qp的功能。
所述多个传感器是为了将所述控制器60能够执行所述流量控制要用的信息输入到该控制器60而设置的,包括发动机转速传感器14、泵压传感器24、回转速度传感器34、右回转先导压传感器44A和左回转先导压传感器44B。所述发动机转速传感器14检测相对于所述发动机10的转速的发动机转速Ne。所述泵压传感器24是检测所述泵压Pp的压力传感器。所述回转速度传感器34是检测由所述回转马达30驱动的所述上部回转体2的回转速度SL的回转速度检测器。所述右回转先导压传感器44A及左回转先导压传感器44B是分别检测所述回转操作阀43对所述回转控制阀42施加的右回转先导压Psa和左回转先导压Psb(换言之,检测所述回转操作阀43上施加的所述回转指令操作的方向和大小)的压力传感器。这些传感器14、24、34、44A、44B生成与其检测对象的物理量相当的电信号即检测信号,并输入到所述控制器60。
所述控制器60中,作为用于控制所述泵流量Qp的功能,具有:图3所示的回转速度流量计算部62、溢流截止控制用目标泵流量计算部63(在下文的记载和图3中记为“RCC目标泵流量计算部63”。)、正控制用目标泵流量计算部64(在下文的记载和图3中记为“PC目标泵流量计算部64”。)、功率控制用目标泵流量计算部65(在下文的记载和图3中记为“HC目标泵流量计算部65”。)、以及泵容量指令部66。接着,一并参照图4的流程图,对以上进行的运算控制动作进行说明。
当所述回转操作阀43上施加了所述回转指令操作时(步骤S1:是),所述回转速度流量计算部62计算回转速度流量Qsl(步骤S2),所述RCC目标泵流量计算部63基于所述回转速度流量Qsl计算溢流截止控制用目标泵流量Qc1(在下文的记载和图4中记为“RCC目标泵流量Qc1”。)(步骤S3a)。另外,与之并行地,所述PC目标泵流量计算部64计算正控制用目标泵流量Qc2(在下文的记载和图4中记为“PC目标泵流量Qc2”。)(步骤S3b),所述HC目标泵流量计算部65计算功率控制用目标泵流量Qc3(在下文的记载和图4中记为“HC目标泵流量Qc3”。)(步骤S3c)。
所述步骤S2中计算出的所述回转速度流量Qsl是对应于所述回转速度传感器34检测出的所述回转速度SL在所述上部回转体2回转时送往所述回转马达30的工作油的流量。所述回转速度流量计算部62计算所述回转速度SL与所述回转马达30的马达容量qm之积作为所述回转速度流量Qsl(Qsl=SL×qm)。
所述步骤S3a中计算出的所述RCC目标泵流量Qc1是用于执行溢流截止控制而计算出的目标泵流量。所述溢流截止控制是以一边将流过所述溢流阀50的工作油的流量即溢流流量抑制为最小限度一边确保使所述上部回转体2回转所需的流量的方式对所述液压泵20的容量qp进行操作的控制。因此,所述RCC目标泵流量Qc1基本上是基于最小溢流流路Qrf和所述回转速度流量Qsl之和而计算出的,所述最小溢流流路Qrf是使所述溢流阀50开阀并确保用于使所述上部回转体2启动所需的泵压Pp而需要的最低限度的溢流流量。
然而,泵容量越小,则所述液压泵20的容积效率(液压泵的实际喷出流量Q与理论喷出流量Qth之比)ηv越低,因此,无论操作人员对回转操作阀43施加了多大的回转指令操作,在回转速度SL极低的回转启动时,所述RCC目标泵流量Qc1被抑制至与最小溢流流量Qrf大致相同的流量时,无法得到很高的容积效率ηv,因此,实际的泵压Pb上升至回转体启动所需的压力还需要耗费时间,从而无法满足操作人员所要求的加速性。
因此,本实施方式所涉及的所述RCC目标泵流量计算部63仅在回转启动时,具体是仅在所述回转操作阀43被施加了回转操作指令(步骤S1:是)且所述回转速度传感器34检测出的所述回转速度SL小于预先设定的设定回转速度SLo时,如图4的步骤S3a所示,设定正值的回转启动用流量Qst(>0),并且计算所述最小溢流流量Qrf与所述回转速度流量Qsl之和再加上所述回转启动用流量Qst而得到的值作为所述溢流截止控制用目标泵流量Qc1。
该RCC目标泵流量Qc1的运算动作是如下的动作即可:最终仅在所述回转启动时使所述RCC目标泵流量Qc1增大所述回转启动用流量Qst的大小,而在回转速度SL为所述设定回转速度SLo以上的正常回转时,将所述RCC目标泵流量Qc1设定为所述最小溢流流量Qrf与所述回转速度流量Qsl之和,而为了得到该结果的计算步骤并无限定。所述正常回转时的所述RCC目标泵流量Qc1的计算,例如可以通过仅在回转启动时设定所述回转启动用流量Qst,并将其包含在RCC目标泵流量Qc1中来实现,也可以通过在所述RCC目标泵流量Qc1中始终包含回转启动用流量Qst,但在所述正常回转时(SL≥SLo)将所述回转启动用流量Qst设定为0来实现。
本实施方式所涉及的所述RCC目标泵流量计算部63,如图4的步骤S3a所示地设定所述回转启动用流量Qst,以使该回转启动用流量Qst随着所述回转速度SL增大而减少。从而,即使在回转启动时,尤其是在回转速度SL极低时,也设定较大的回转启动用流量Qst,确保有很大的泵容量qp和与之对应的很高的容积效率ηv,另一方面,随着所述回转速度SL增大且加速性的要求下降,抑制RCC目标泵流量Qc1,能够提高减少溢流损失的优先度。
更具体而言,本实施方式所涉及的所述RCC目标泵流量计算部63设定所述回转启动用流量Qst,使该回转启动用流量Qst随着所述回转速度SL增大至所述设定回转速度SLo而连续地减少至0。从而,在所述回转速度SL增大而超过所述设定回转速度SLo时,能防止泵容量qp剧变,由此能够进行更加顺畅的回转驱动。
所述回转启动用流量Qst可以基于为所述回转速度SL与所述回转启动用流量Qst之间的关系而预先准备的计算公式来算出,也可以使用为上述关系而预先准备的图表来决定。或者,也可以将回转启动时的所述回转启动用流量Qst始终设定为固定值。
所述步骤S3b中计算出的所述PC目标泵流量Qc2是为了执行正控制而计算出的目标泵流量,该正控制是所述回转指令操作越大,则所述泵容量qp越大的控制。具体而言,所述PC目标泵流量计算部64基于为所述回转指令操作所对应的先导压、即所述右回转先导压Psa、左回转先导压Psb中较大的一方先导压与所述PC目标泵流量Qc2之间的关系(如图4的步骤S3b所示,随着回转先导压Psa或Psb增大,PC目标泵流量Qc2增大的特性)而预先准备的计算公式或者图表,根据所述先导压来计算所述PC目标泵流量Qc2。
所述步骤S3c中计算出的所述HC目标泵流量Qc3是用于执行功率控制而计算出的目标泵流量。所述功率控制是限制泵流量Qp的控制,以使所述泵压Pb与泵流量Qp之积落在基于所述发动机10的能力而确定的功率曲线的范围内。所述HC目标泵流量计算部65基于为所述泵压Pp与所述HC目标泵流量Qc3之间的关系而预先设定的曲线(例如图4的步骤S3c所示,是曲线并是对应于所述功率曲线的曲线),计算所述HC目标泵流量Qc3。
计算出所述目标泵流量Qc1、Qc2、Qc3后,所述控制器60的所述泵容量指令部66从该目标泵流量Qc1、Qc2、Qc3中选择最小的一个,并将其设定为最终目标泵流量Qpt(步骤S4)。换言之,在决定最终目标泵流量Qpt时,所述目标泵流量Qc1、Qc2、Qc3中较小的更为优先。此外,该泵容量指令部66计算由此决定的最终目标泵流量Qpt除以所述发动机转速传感器14检测出的发动机转速Ne而得到的值作为目标泵容量qpt,生成用于使实际泵容量qp接近该目标泵容量qpt的泵容量指令,并将其输入到所述液压泵20的所述泵调节器22(步骤S5)。
由此,实现使所述液压泵20的泵流量Qp接近所述最终目标泵流量Qpt的泵流量控制。因而,在上部回转体2停止的状态下向所述回转操作阀43施加较大的回转指令操作(即要求上部回转体2在高加速性下开始回转的操作),并在决定所述最终目标泵流量Qpt时所述RCC目标泵流量Qc1优先的情况下,泵容量指令部66使该最终目标泵流量Qpt比所述最小溢流流量Qrf与所述回转速度流量Qsl之和要大所述回转启动用流量Qst的大小(换言之,使实际溢流流量大于所述最小溢流流量Qrf),从而能够执行以溢流截止控制为基本的能够响应所述加速性要求的泵流量控制。
另一方面,施加在所述回转操作阀43上的回转指令操作较小,决定所述最终目标泵流量Qpt时所述PC目标泵流量Qc2优先的情况下,即不要求高加速性的情况下,所述泵容量指令部66将该最终目标泵流量Qpt抑制在于所述回转指令操作相对应的低流量,从而最大程度地抑制溢流损失。
另外,所述RCC目标泵流量Qc1和所述PC目标泵流量Qc2中的任一个较低的情况下,当所述HC目标泵流量Qc3低于这些目标泵流量Qc1、Qc2时,所述泵容量指令部66使该HC目标泵流量Qc3优先,从而能够防止因过大的功率要求而导致发动机停止等故障发生。
本发明并不局限于以上说明的实施方式及其变形例。本发明还包括例如下述的方式。
(A)关于回转启动用流量Qst的设定
本发明中,在为了计算RCC目标泵流量而设定回转启动用流量Qst的情况下,其值可以考虑液压泵的特性(尤其是容积效率)进行适当设定。另外,相当于回转启动时的上限回转速度的设定回转速度SLo也可以根据操作人员的喜好、工程机械的特性(上部回转体2的转动惯量或液压泵、液压马达的特性等)自由地设定。
另外,在图4所示的例子中,将所述回转启动用流量Qst设定得大至回转启动时的RCC目标泵流量Qc1的值大于设定回转速度SLo的值的程度,但也可以设定所述回转启动用流量Qst,使得该回转启动时的所述RCC目标泵流量Qc1的值成为与所述设定回转速度SLo的值大致相等的值(例如固定值)或者比之要小的值。
此外,确保在回转启动时有足够的加速性的效果也可以通过设定所述回转启动用流量Qst以外方式来实现。例如,在回转启动时,RCC目标泵流量Qc1中并不包含所述回转启动用流量Qst,但通过在基于该RCC目标泵流量Qc1来计算出的目标泵容量qpt上增加预先设定的校正量,也能确保回转启动时具有高加速性。
(B)关于液压泵
传动件,致动器本发明的液压泵并不是回转马达专用的液压泵,也可以兼用于其他液压致动器的驱动。这种情况下,至少在回转驱动时使所述溢流截止控制优先,从而能够实现本发明的效果。
(C)关于回转控制装置
本发明所涉及的回转控制装置并不限于所述回转控制阀42和所述回转操作阀43的组合。该回转控制装置,例如也可以通过电磁阀、电器杆装置和先导压操作部的组合来实现,其中,电磁阀分别设置在所述先导液压源与所述回转控制阀42的先导端口42a、42b之间,其进行工作以使先导压发生变化,电气杆装置接受回转指令操作并生成与该回转指令操作相对应的电信号即回转指令信号,先导压操作部向所述电磁阀输入先导压指令信号,从而向所述先导端口42a、42b输入与所述回转指令信号相对应的先导压。
(D)溢流截止控制以外的泵流量控制
本发明能广泛地应用于所要执行的泵流量控制中至少包括溢流截止控制的情况。本发明还包括例如不执行所述正控制或所述功率控制而仅执行所述溢流截止控制的方式、除了所述正控制和所述功率控制之外或者代替所述正控制和所述功率控制还与所述溢流截止控制一同进行其它控制的方式。在后者那样执行多项控制的方式中,即该多项控制中至少包括所述溢流截止控制和所述正控制的方式中,使溢流截止控制用目标泵流量与正控制用目标泵流量中较小那一方的目标泵流量优先来生成所述泵容量指令,从而能够与上述同样地在确保高加速性的同时,又能抑制溢流损失。这里,“使溢流截止控制用目标泵流量和正控制用目标泵流量中较小那一方的目标泵流量优先”意在确定两个目标泵流量之间的相对关系,并不排除上述实施方式那样有比该溢流截止控制用目标泵流量和该正控制用目标泵流量更小的最小目标泵流量(例如所述功率控制用泵流量)的情况下基于该最小目标泵流量来生成泵容量指令的方式。
如上所述,本发明提供一种利用液压使工程机械所包含的回转体进行回转的回转驱动装置,能够抑制溢流损失,并且确保回转启动时有很高的加速性。
提供一种工程机械的回转驱动装置,设置于工程机械,该工程机械包括机体、可回转地搭载于该机体的回转体、以及生成用于驱动该回转体的动力的发动机,所述回转驱动装置利用液压使所述回转体进行回转,包括:液压泵,是容量可变型的液压泵,由所述发动机驱动而喷出工作油;回转马达,由液压马达构成,通过接受来自所述液压泵的工作油的供给而以使所述回转体回转的方式进行工作;回转控制装置,通过接收回转指令操作来允许从所述液压泵向所述回转马达供给工作油,从而使所述回转体进行回转;溢流阀,设置在用于使从所述液压泵喷出的工作油释放至箱体的溢流流路中,以将供给至所述回转马达的工作油的压力即泵压限制在预先设定的设定压以下的压力的方式进行开阀;回转速度检测器,检测所述回转体的回转速度;以及,流量控制装置,在所述回转控制装置被施加了所述回转指令操作时,使所述液压泵的容量即泵容量变化,从而控制从该液压泵喷出的工作油的流量即泵流量。所述流量控制装置包含:回转速度流量计算部,计算在所述回转体进行回转时对应于所述回转速度检测器检测到的所述回转速度而向所述回转马达流入的工作油的流量即回转速度流量;溢流截止控制用目标泵流量计算部,基于最小溢流流量和所述回转速度流量之和来计算所述泵流量的目标值即溢流截止控制用目标泵流量,该最小溢流流量是在所述溢流阀流过的工作油的流量,即,使所述溢流阀开阀而确保使所述回转体启动所需的所述泵压而所需的最低限度的溢流流量;以及,泵容量指令部,向所述液压泵输入泵容量指令,该指令以能够获得所述溢流截止控制用目标泵流量计算部计算出的所述溢流截止控制用目标泵流量的方式使所述泵容量变化,所述溢流截止控制用目标泵流量计算部和所述泵容量指令部,在所述回转控制装置被施加了所述回转指令操作且所述回转速度小于预先设定的设定回转速度的回转启动时,使所述泵容量增大至比对应于所述最小溢流流量与所述回转速度流量之和的泵容量大。
根据该回转驱动装置,以基于所述最小溢流流量与所述马达流量之和的控制、即一边抑制溢流流量一边确保在现在的回转速度下使回转体回转所需的泵流量的溢流截止控制为基本,使实际的泵容量增大至比相当于回转启动时所述最小溢流流量与所述马达流量之和的泵容量更大,来提高所述液压泵的容积效率,即在回转启动时相比溢流损失的减少而优先确保容积效率,从而能够确保较高的加速性。
作为使所述泵容量增大的具体实施方式,较为理想的是,所述溢流截止控制用目标泵流量计算部,设定在所述回转启动时用于增大所述泵容量的回转启动用流量,在所述回转启动时,基于所述最小溢流流量与所述回转速度流量之和再加上所述回转启动用流量而得到的流量,来计算所述溢流截止控制用目标泵流量。该实施方式中,在回转启动时的目标泵流量的计算中,能够通过所述最小溢流流量与所述回转速度流量之和再加上所述回转启动用流量这样简单的运算动作,来适当地增大回转启动时的泵容量。
更具体而言,较为理想的是,所述回转启动用流量设定成随着所述回转速度增大而减少。从而,即使在回转启动时,尤其是在回转速度极低时,也设定较大的回转启动用流量,确保有较大的泵容量和较高的容积效率,另一方面,随着因所述回转速度增大而加速性的要求下降,抑制目标泵流量,能够提高减少溢流损失的优先度。
这种情况下,较为理想的是,所述回转启动用流量被设定成随着所述回转速度增大至所述设定回转速度而连续地减少至0。从而,在所述回转速度增大而超过所述设定回转速度时,能防止泵容量剧变,由此能够进行更加顺畅的回转驱动。
较为理想的是,所述流量控制装置还包含正控制用泵流量计算部,用于计算当施加在所述回转控制装置的所述回转指令操作越大则就越使所述泵容量变大的正控制用目标泵流量,所述泵容量指令部优先所述溢流截止控制用目标泵流量和所述正控制用目标泵流量中较小一方的目标泵流量来生成所述泵容量指令。由此,在被施加于所述回转控制装置的所述回转指令操作较小时,即,不要求很高的加速性时,通过使所述正控制用目标泵流量优先而使泵容量减少,能够优先减少溢流损失。
- 回转驱动装置和回转作业工程机械
- 一种回转驱动臂驱动装置及回转驱动臂传动装置及具有回转驱动臂传动装置的联动式太阳能光伏跟踪系统