一种用于仓储物流穿梭车的液压控制系统及穿梭车
文献发布时间:2023-06-19 13:27:45
技术领域
本发明属于仓储物流穿梭车技术领域,具体涉及一种用于仓储物流穿梭车的液压控制系统及穿梭车。
背景技术
目前,应用于仓储物流穿梭车的液压系统原理有很多,可以达到液压油缸的同步。在现有技术中,穿梭车液压控制系统的实现形式有很多,其基本形式可以分为开环控制方式和闭环控制方式,开环控制方式基本是靠液压控制元件如同步阀、节流阀或调速阀等自身的精度来控制执行元件的同步。一般来说,采用开环控制方式的液压同步系统结构简单、成本较低,但无法消除由于负载不同、油缸制造精度差异和液压油泄露等原因造成的误差。
另外,同步液压系统也可分为泵控同步控制和阀控同步控制两种。前者是由多个泵分别输入相同的流量至各个油缸,通过改变泵的排量来控制泵的输出流量,从而调节执行元件的运动速度,泵控系统效率高,能量损耗少,但由于泵的响应速度不高,泵控系统的动态特性相对较差,控制精度不高。
目前,国内外都没有很好的方法来提高同步精度,大多数采用对误差回路进行修正的方法,来避免多次往复运动形成的积累误差,但这仅仅是从系统元件品质或油路结构入手,稳定性不高,效率也较低。
发明内容
本发明要解决的技术问题是提供一种用于仓储物流穿梭车的液压控制系统及穿梭车,可以实现油缸同步运动,控制逻辑清晰、简单,组成元件少、成本低。
为了解决上述技术问题,本发明采用的一种技术方案是:所述用于仓储物流穿梭车的液压控制系统,包括:
动力模块,所述动力模块包括马达、油箱以及由所述马达驱动的油泵,油泵的输出管路上设置有单向阀;
执行模块,所述执行模块包括第一液压缸组和第二液压缸组;所述第一液压缸组包括彼此并联连接的第一液压缸小组和第二液压缸小组,第一液压缸小组由多个同步运行的液压缸串联连接,第二液压缸小组由多个同步运行的液压缸串联连接;所述第二液压缸组包括彼此并联连接的第三液压缸小组和第四液压缸小组,第三液压缸小组由多个同步运行的液压缸串联连接,第四液压缸小组由多个同步运行的液压缸串联连接;
控制模块,所述控制模块包括一个主控制阀和四个次控制阀,主控制阀连接动力模块和次控制阀,次控制阀连接执行模块。
进一步地,所述动力模块内还设置有用于调节液压控制系统压力的第一溢流阀,第一溢流阀布置在单向阀之后,与油箱相连。
进一步地,在所述第一液压缸组和第二液压缸组里,除首缸和末缸外,其余每个液压缸并联一个溢流阀。
进一步地,所述第一液压缸组的首端和末端分别连接第一次控制阀和第三次控制阀的一端,所述第二液压缸组的首端和末端分别连接第二次控制阀和第四控制阀的一端;所述第一次控制阀和第二次控制阀的另一端与主控制阀的第一输出口,第三次控制阀和第四次控制阀的另一端与主控制阀的第二输出口连接,主控制阀的供油口与动力模块的油箱通过单向阀连接,回油口与动力模块的回油箱连接。
进一步地,所述第一液压缸组和第二液压缸组中的各个液压缸为相同规格的液压缸。
进一步地,所述油箱的上部设置有用于排出液压系统中的空气的呼吸阀。
进一步地,所述主控制阀采用三位四通换向阀。
进一步地,所述次控制阀采用电磁换向阀。
本发明还提供一种用于仓储物流穿梭车,所述穿梭车采用上述的液压系统。
本发明的优点具体如下:
本发明可实现油缸同步运动,控制逻辑清晰、简单,组成元件少、成本低。
附图说明
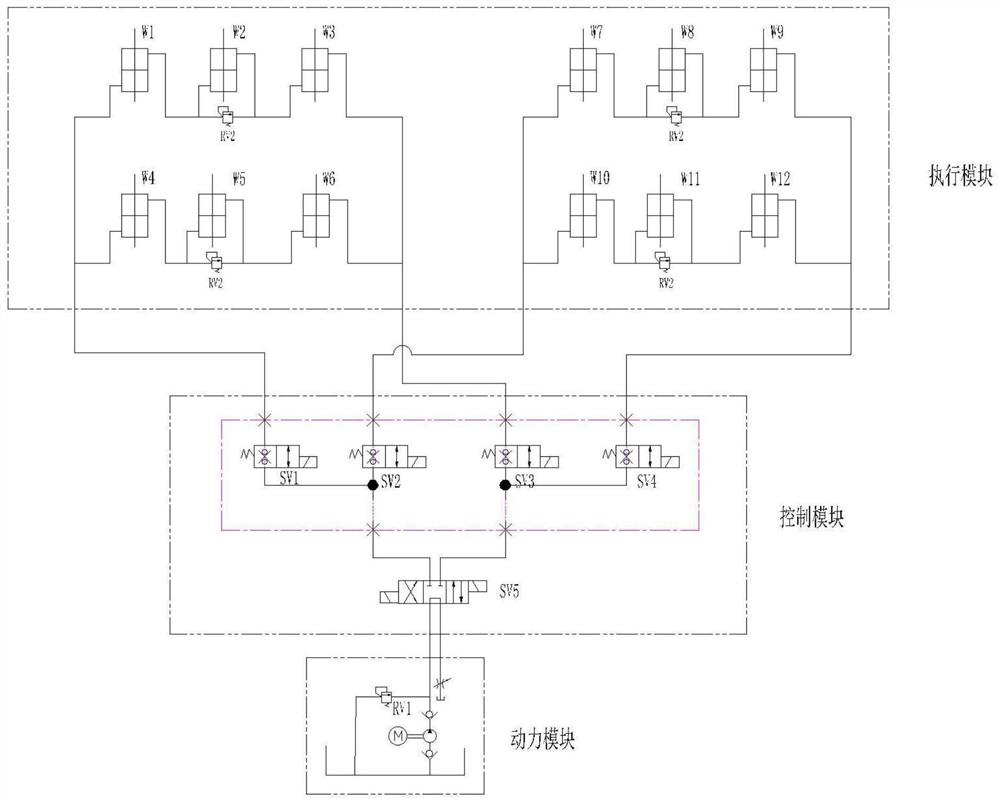
图1为用于仓储物流穿梭车的液压控制系统的示意图。
具体实施方式
为了使本发明的上述目的、特征和优点能够更加明显易懂,下面结合具体附图对本发明的具体实施方式作进一步的说明。
在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是本发明还可以采用其他不同于在此描述的其它方式来实施例,本领域技术人员可以在不违背本发明内涵的情况下做类似推广,因此本发明不受下面公开的具体实施例的限制。
如图1的示,本发明所述用于仓储物流穿梭车的液压控制系统,包括:
动力模块,所述动力模块包括马达、油箱以及由所述马达驱动的油泵,油泵的输出管路上设置有单向阀;所述动力模块内还设置有用于调节液压控制系统压力的第一溢流阀RV,第一溢流阀RV布置在单向阀之后,与油箱相连,限制系统的压力上限;
执行模块,所述执行模块包括第一液压缸组和第二液压缸组;所述第一液压缸组包括彼此并联连接的第一液压缸小组和第二液压缸小组,第一液压缸小组由多个同步运行的液压缸W1、W2、W3串联连接,第二液压缸小组由多个同步运行的液压缸W4、W5、W6串联连接;所述第二液压缸组包括彼此并联连接的第三液压缸小组和第四液压缸小组,第三液压缸小组由多个同步运行的液压缸W7、W8、W9串联连接,第四液压缸小组由多个同步运行的液压缸W10、W11、W12串联连接;在所述第一液压缸组和第二液压缸组里,除首缸和末缸外,其余每个液压缸并联一个溢流阀RV2;
控制模块,所述控制模块包括一个主控制阀SV5和四个次控制阀SV1、SV2、SV3、SV4,主控制阀SV5采用三位四通换向阀,次控制阀SV1、SV2、SV3、SV4采用电磁换向阀,主控制阀和次控制阀相互配合控制两组液压缸组的换向,并且于系统保压。
所述第一液压缸组的首端和末端分别连接第一次控制阀SV1和第三次控制阀SV3的一端,所述第二液压缸组的首端和末端分别连接第二次控制阀SV2和第四控制阀SV4的一端;所述第一次控制阀SV1和第二次控制阀SV2的另一端与主控制阀SV5的第一输出口,第三次控制阀SV3和第四次控制阀SV4的另一端与主控制阀SV5的第二输出口连接,主控制阀SV5的供油口与动力模块的油箱通过单向阀连接,回油口与动力模块的回油箱连接。所述作为主控制阀SV5的三位四通换向阀被配置为三个工作位置,对应于所述第一液压缸组、第二液压缸组中各个液压缸的伸出、缩回和停止的三种状态。
所述第一液压缸组和第二液压缸组中的各个液压缸为相同规格的液压缸。
所述油箱的上部设置有用于排出液压系统中的空气的呼吸阀。
以上对本申请所提供的一种用于仓储物流穿梭车的液压控制系统及穿梭车进行了详细介绍,本文中应用了具体个例对本申请的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本申请的方法及其核心思想;同时,对于本领域的一般技术人员,依据本申请的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本申请的限制。
- 一种用于仓储物流穿梭车的液压控制系统及穿梭车
- 一种基于STM的智能物流仓储穿梭车控制系统及其方法