车辆对中装置和自动停车系统
文献发布时间:2023-06-19 13:29:16
技术领域
本申请涉及智能车库技术领域,特别是涉及一种车辆对中装置和自动停车系统。
背景技术
城市停车难的现象越来越普遍,随着智能车库技术的发展,智能车库作为缓解停车难的重要手段被广泛应用,能够为越来越多的汽车提供智能停车服务。但是在智能车库停车时,需要驾驶人将车辆停放在入口内部的预设停车位置。如果驾驶人驾驶技术不足,停放车辆时,车辆相比预设停车位置有较大的偏移角度,当车库内的搬运小车需要将车辆搬运至空闲车位时,可能与车辆发生碰撞,从而造成车辆损坏,降低停车效率。
发明内容
本申请主要解决的技术问题是提供一种车辆对中装置和自动停车系统,能够将车辆准确移动至预设位置。
为解决上述技术问题,本申请采用的一个技术方案是:提供一种车辆对中装置,包括:
承载台;
至少两推移组件,相对设置且分别固定在所述承载台的相对两侧,每一所述推移组件包括伸缩机构;
控制组件,用于控制两个所述伸缩机构向着相反的方向同时移动相同的距离。
其中,所述控制组件包括:
换向机构,安装于所述承载台;
联动机构,所述联动机构的一端连接于其中一个所述伸缩机构,所述联动机构的另外一端经过所述换向机构换向后连接于另外一个所述伸缩机构,两个所述伸缩机构在所述联动机构的带动下向着相反的方向同时移动相同的距离。
其中,所述控制组件还包括驱动机构,所述驱动机构包括伸缩杆,所述伸缩杆与任意一个所述伸缩机构连接。
其中,所述换向机构包括若干定滑轮,所述联动机构包括拉绳,所述拉绳的一端连接其中一个所述伸缩机构,所述拉绳的另一端依次经过所述定滑轮后连接于另外一个所述伸缩机构。
其中,所述换向机构还包括保护罩,所述定滑轮至少包括第一滑轮组和第二滑轮组,分别设置于所述相对两侧的相对两端,所述保护罩固定于所述承载台,并至少覆盖位于所述第一滑轮组和所述第二滑轮组之间的部分所述拉绳。
其中,所述控制组件包括控制器及与所述控制器电连接的两驱动机构,每一所述驱动机构包括伸缩杆,每一所述伸缩杆连接于对应的所述伸缩机构,所述控制器控制所述伸缩杆沿着相反的方向同时移动相同的距离。
其中,每一所述推移组件还包括缓冲机构,每一所述伸缩机构还包括上安装板,所述缓冲机构连接于所述上安装板,用于在所述推移组件与承载于所述承载台上的车辆抵接的过程中起到缓冲作用。
其中,所述缓冲机构包括接触板、固定板、弹性件和连接件,所述弹性件连接所述接触板和所述固定板,所述连接件连接所述固定板和所述上安装板。
其中,每一所述伸缩机构还包括枢转连接的两个支撑杆和下安装板,所述下安装板固定在所述承载台上,所述两个支撑杆的相对两端分别滑动安装于所述上安装板和所述下安装板,所述两个支撑杆的另外相对两端分别转动安装于所述上安装板和所述下安装板,以使所述上安装板朝向或者远离所述下安装板移动。
其中,所述车辆对中装置还包括安装于每一所述推移组件的第一传感器;每一所述第一传感器均与所述控制组件耦接,所述第一传感器感测对应的所述推移组件的位置,所述控制组件根据所述第一传感器的感测位置控制所述伸缩机构的伸缩。
其中,所述车辆对中装置还包括安装于每一所述推移组件的第二传感器;每一所述第二传感器均与所述控制组件耦接,所述第二传感器感测对应的所述伸缩机构的伸缩距离,所述控制组件根据所述第二传感器的感测伸缩距离控制所述伸缩机构停止移动或者转换移动方向。
其中,所述车辆对中装置包括四个所述推移组件,四个所述推移组件分为分别固定在所述承载台的相对两侧的两组,每一组包括两个推移组件,且每一组的两个所述推移组件的所述伸缩机构向着相反的方向同时移动相同的距离。
其中,所述车辆对中装置还包括辊动组件,固定于所述承载台的相对两侧之间的区域内,用于承载车辆,以减小所述车辆被所述伸缩机构推动时在所述承载台上的移动阻力。
其中,所述辊动组件包括框架和多个辊动件,所述辊动件包括辊筒、辊轴和轴承,所述辊轴穿设所述轴承并固定于所述框架上,所述辊筒套设所述辊轴和所述轴承,以使所述辊筒绕所述辊轴辊动。
为解决上述技术问题,本申请采用的另一个技术方案是:提供一种自动停车系统,包括:
上述技术方案所述的车辆对中装置,用于将承载于所述承载台上的车辆移动至居中位置;
搬运小车,用于在所述车辆移动至所述居中位置之后将所述车辆搬运至空闲车位。
本申请的有益效果是:本申请提供的车辆对中装置包括承载台、至少两推移组件和控制组件。其中,至少两推移组件相对设置且分别固定在承载台的相对两侧,每一推移组件包括伸缩机构;控制组件用于控制两个伸缩机构向着相反的方向同时移动相同的距离。当车辆停放于承载台上且偏离居中位置,本申请车辆对中装置的控制组件可控制分别位于车辆两侧的两个伸缩机构同时朝向车辆移动,其中一个伸缩机构先与车辆抵接,则推动车辆移动,直到另一个伸缩机构也与车辆抵接,此时车辆被推移至居中位置。后续可利用搬运小车将车辆搬运至车库中的空闲车位。可见,本申请车辆对中装置能够将车辆准确移动至承载台的居中位置,且能够减小后续搬运过程中搬运小车与车辆的碰撞几率,还能够提高停车效率。
附图说明
为了更清楚地说明本申请实施方式中的技术方案,下面将对实施方式描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。其中:
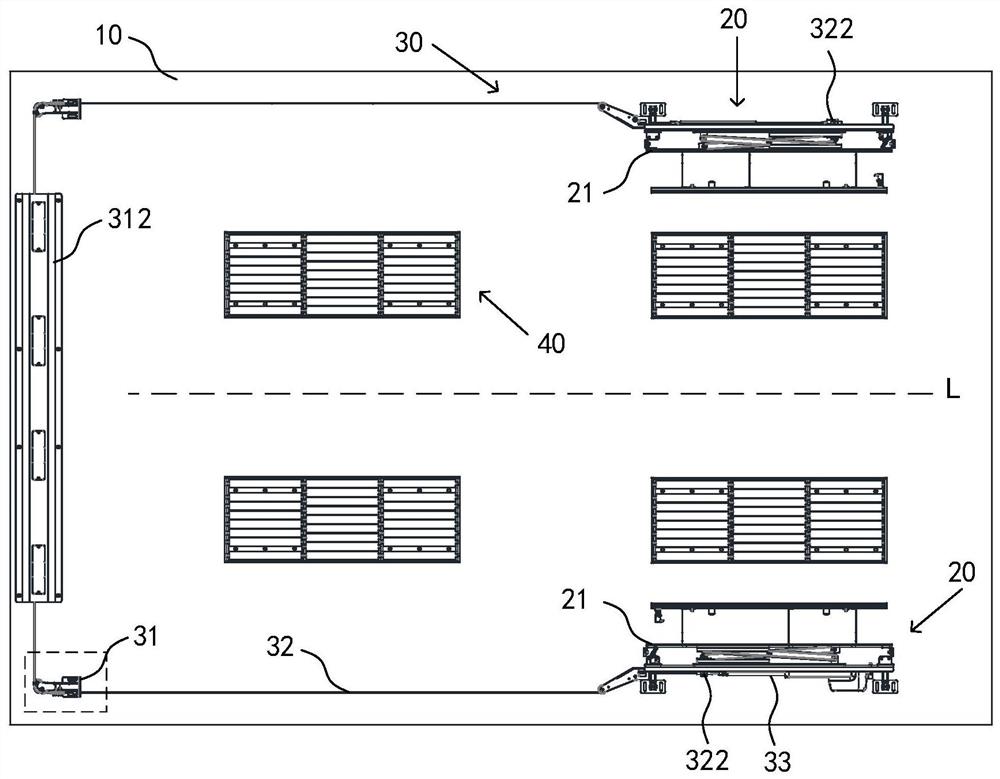
图1为本申请车辆对中装置一实施方式的结构示意图;
图2为图1中推移组件的结构示意图;
图3a为车辆偏移停放示意图;
图3b为车辆对中停放示意图;
图4为图2中推移组件的爆炸结构示意图;
图5为图1中虚线框处的放大示意图;
图6为图4中虚线框处的放大示意图;
图7为图1中辊动组件的爆炸结构示意图;
图8为本申请车辆对中装置另一实施方式的结构示意图。
具体实施方式
下面将结合本申请实施方式中的附图,对本申请实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式仅仅是本申请一部分实施方式,而不是全部实施方式。基于本申请中的实施方式,本领域普通技术人员在没有做出创造性的劳动前提下所获得的所有其他实施方式,都属于本申请保护的范围。
请参阅图1和图2,图1为本申请车辆对中装置一实施方式的结构示意图,图2为图1中推移组件的结构示意图,该车辆对中装置包括承载台10、至少两推移组件20和控制组件30。其中,至少两推移组件20相对设置且分别固定在承载台10的相对两侧,图1中示意性画出两推移组件20分别设置于承载台10相对两侧的情况。每一推移组件20包括伸缩机构21,控制组件30用于控制两个伸缩机构21向着相反的方向同时移动相同的距离。
图1中虚线L表示承载台10表面的居中位置,车辆停放于承载台10后,优选车辆的中线与该虚线L重合,则有利于搬运小车对车辆进行搬运操作。如果驾驶人停放车辆时使其与居中位置偏移了一定角度,则可利用控制组件30控制两个伸缩机构21均朝向车辆同时移动相同的距离,将车辆推移至居中位置。
具体地,请参阅图3a和图3b,图3a为车辆偏移停放示意图,图3b为车辆对中停放示意图。当车辆C以图3a所示状态停放时,两个伸缩机构21均朝向车辆C伸长时,其中一个伸缩机构21(图1中上侧的伸缩机构21)先与车辆C抵接,则推动车辆移动,直到另一个伸缩机构21(图1中下侧的伸缩机构21)也与车辆C抵接,此时车辆C被推移至居中位置,再将两个伸缩机构21缩回,如图3b所示。
本实施方式提供的车辆对中装置能够将车辆准确移动至承载台的居中位置,且能够减小后续搬运过程中搬运小车与车辆的碰撞几率,还能够提高停车效率。
在一个实施方式中,请继续参阅图1和图2,车辆对中装置的控制组件30包括换向机构31和联动机构32。其中,换向机构31安装于承载台10。联动机构32的一端连接于其中一个伸缩机构21,联动机构32的另外一端经过换向机构31换向后连接于另外一个伸缩机构21,两个伸缩机构21在联动机构32的带动下向着相反的方向同时移动相同的距离。即两个伸缩机构21可同时朝向虚线L伸长,也可同时远离虚线L缩短,从而在需要推移车辆时伸长,在推移完成之后缩短。
在一个实施方式中,请结合图1和图2参阅图4,图4为图2中推移组件的爆炸结构示意图,车辆对中装置的控制组件30还包括驱动机构33,驱动机构33包括伸缩杆331和用于驱动伸缩杆伸缩的电机332,伸缩杆331与任意一个伸缩机构21连接,图1中,伸缩杆331与下侧的伸缩机构21连接。两个伸缩机构21之间通过联动机构32相连,再利用驱动机构33驱动其中一个伸缩机构21的伸缩,从而使两个伸缩机构21能够向着相反的方向同时移动相同的距离,减少驱动机构33的数量,降低车辆对中装置的制造成本。
具体地,换向机构31包括若干定滑轮311,定滑轮311至少包括第一滑轮组(未标示)和第二滑轮组(未标示),分别设置于上述承载台10相对两侧的相对两端,请参阅图5,图5为图1中虚线框处的放大示意图。联动机构32包括拉绳321,拉绳321的一端连接其中一个伸缩机构21,拉绳321的另一端依次经过定滑轮311后连接于另外一个伸缩机构21。如图1所示,拉绳321的一端连接于下侧的伸缩机构21,然后依次经过第一滑轮组和第二滑轮组,并延伸至上侧的伸缩机构21,拉绳321的另一端连接于该上侧的伸缩机构21。
也就是说,下侧的伸缩机构21同时与伸缩杆331和拉绳321连接,优选地,联动机构32还包括辅助件322,为一刚性件,同时与下侧的伸缩机构21、伸缩杆331和拉绳321连接。参阅图1-图5,伸缩杆331朝向右侧缩短时,辅助件322跟随伸缩杆331朝向右侧移动,同时,拉绳321被拉向右侧,下侧的伸缩机构21朝向虚线L伸长。连接下侧的伸缩机构21的拉绳321一端被拉向右侧,则拉绳321的另一端以同样的距离被拉向左侧,带动上侧的伸缩机构21中的辅助件322朝向左侧移动,从而使上侧的伸缩机构21也朝向虚线L伸长。可见,图1中上侧和下侧的推移组件20的结构基本相同,但并不是完全镜像对称,图2所示为图1中位于下侧的推移组件20。容易理解的是,当伸缩杆331朝向左侧伸长时,两个伸缩机构21同时远离虚线L缩短。从而利用一个驱动机构33同时驱动两个伸缩机构21的伸缩移动。
在一个实施方式中,请继续参阅图1和图2,车辆对中装置的换向机构31还包括保护罩312,固定于承载台10,并至少覆盖位于第一滑轮组和第二滑轮组之间的部分拉绳321,以对拉绳321起到保护作用。
在其他实施方式中,控制组件30还可包括控制器及与控制器电连接的两驱动机构,每一驱动机构包括伸缩杆,每一伸缩杆连接于对应的伸缩机构21,控制器控制伸缩杆沿着相反的方向同时移动相同的距离。该驱动机构可与上述图1和图2中的驱动机构33相同。也就是说,每个伸缩机构21均由一个驱动机构驱动进行伸缩,而不需要上述换向机构和联动机构将两个伸缩机构连接起来,再利用控制器控制两个驱动机构,以使两个伸缩杆同时伸或缩相同的距离,从而将车辆调整至居中位置。
在一个实施方式中,请继续参阅图1-图5,车辆对中装置的每一推移组件20还包括缓冲机构22,每一伸缩机构21还包括上安装板211,缓冲机构22连接于上安装板211,用于在推移组件20与承载于承载台10上的车辆抵接的过程中起到缓冲作用。使得推移组件20在刚刚与车辆接触的时刻并不推动车辆,而是有一个缓冲过程,以减少对车辆的损伤。
具体地,缓冲机构22包括接触板221、固定板222、弹性件223和连接件224,弹性件223连接接触板221和固定板222,连接件224连接固定板222和伸缩机构21的上安装板211。弹性件223例如是弹簧,在接触板221与车辆接触时开始压缩,弹性件223压缩至不能再压缩时,伸缩机构21开始推动车辆,弹性件223压缩的过程即提供了一个缓冲过程,能够减少对车辆的损伤。具体请参阅图6,图6为图4中虚线框处的放大示意图。
其中,每一伸缩机构21还包括枢转连接的两个支撑杆212和下安装板213,下安装板213固定在承载台10上,两个支撑杆212的相对两端(A1和A2)分别滑动安装于上安装板211和下安装板213,两个支撑杆212的另外相对两端(B1和B2)分别转动安装于上安装板211和下安装板213,以使上安装板211朝向或者远离下安装板213移动。
可见,两个支撑杆212呈剪叉结构,其中一个支撑杆212的A2端与上述辅助件322连接,上安装板211和下安装板213上均设置有供支撑杆212的端部(A1和A2)滑动的滑移槽(未标示),其中,辅助件322穿设下安装板213上的滑移槽,且辅助件322的一端从该滑移槽中露出,以与伸缩杆331和拉绳321连接,使得两个支撑杆212能够被伸缩杆331驱动而枢转运动,从而实现上安装板211朝向或者远离下安装板213的移动。
进一步地,每一推移组件20还包括固定机构23,固定机构23包括连接板231和至少一个固定座232,图1和图2中示意性画出两个固定座232。其中,连接板231与下安装板213固定连接,连接板231上对应下安装板213的滑移槽也设置有通槽,辅助件322的一端从该通槽中露出,以与伸缩杆331和拉绳321连接。固定座232则固定连接于连接板231上,用于将推移组件20固定于承载台10上。上述定滑轮311还可包括第三滑轮组和第四滑轮组,分别设置于上侧和下侧的固定机构23的其中一个固定座232上,以调节拉绳321的方向。
在一个实施方式中,车辆对中装置还包括安装于每一推移组件20的第一传感器241。每一第一传感器241均与控制组件30耦接,第一传感器241感测对应的推移组件20的位置,控制组件30根据第一传感器241的感测位置控制伸缩机构21的伸缩。优选地,如图4所示,可将第一传感器241安装于缓冲机构22的固定板222上,具体用于感测接触板221是否与车辆抵接。根据上述推移组件20推动车辆的过程描述可知,当每个推移组件20中的第一传感器241均感测到接触板221与车辆抵接,则说明车辆已经被推移至居中位置,此时控制组件30可控制伸缩机构21停止伸长或者是往缩短的方向移动。具体控制方法可参见上述说明,此处不再赘述。
在一个实施方式中,车辆对中装置还包括安装于每一推移组件20的第二传感器242。每一第二传感器242均与控制组件30耦接,第二传感器242感测对应的伸缩机构21的伸缩距离,控制组件30根据第二传感器242的感测伸缩距离控制伸缩机构21停止移动或者转换移动方向。优选地,如图4所示,可将第二传感器242设置于固定机构23的连接板231上。上安装板211朝向或者远离下安装板213移动时均存在极限移动距离,第二传感器242具体用于感测上安装板211相对下安装板213的距离,控制组件30则可在上安装板211移动至极限距离时控制其停止移动或者转换移动方向。具体控制方法可参见上述说明,此处不再赘述。
在一个实施方式中,请结合图1参阅图7,图7为图1中辊动组件的爆炸结构示意图。车辆对中装置还包括辊动组件40,固定于承载台10的相对两侧之间的区域内,用于承载车辆,以减小车辆被伸缩机构21推动时在承载台10上的移动阻力。
具体地,辊动组件40包括框架41和多个辊动件42和螺钉43,辊动件42又包括辊筒421、辊轴422和轴承423,其中,辊轴422穿设轴承423并通过螺钉43固定于框架41上,辊筒421套设辊轴422和轴承423,以使辊筒421绕辊轴422辊动。
优选地,车辆对中装置包括四个辊动组件40,分别对应于车辆的四个轮胎,当车辆被伸缩机构21推动而在承载台10表面移动时,辊筒421绕辊轴422辊动,使得车辆在承载台10表面以辊动方式移动,能够减少车辆移动时的摩擦阻力,从而减少对轮胎的损伤,并提高停车效率。
在一个方式中,请结合图1-图7参阅图8,图8为本申请车辆对中装置另一实施方式的结构示意图,该车辆对中装置包括承载台10、四个推移组件20和控制组件30,其中,四个推移组件20分为分别固定在承载台10的相对两侧的两组,每一组包括两个推移组件20,且每一组的两个推移组件20的伸缩机构21向着相反的方向同时移动相同的距离。
与上述实施方式相似,一组中的两个推移组件20可通过换向机构31和联动机构32连接,再使用一个驱动组件驱动联动机构32,从而带动一组中的两个伸缩机构21移动。则两组共四个推移组件20需要个两个驱动组件进行驱动,可再使用一个控制器与这两个驱动组件耦接,从而控制四个推移组件20中的伸缩机构21同时移动相同的距离。当然,也可以每个推移组件20均配置一个驱动组件,再使用一个控制器与这四个驱动组件耦接,从而控制四个推移组件20中的伸缩机构21同时移动相同的距离。
优选地,四个推移组件20分别对应车辆的四个轮胎外侧设置于承载台10上,则伸缩机构21伸长后与车辆的轮胎抵接,轮胎的柔性材质可进一步为推移过程提供缓冲,以减少对车辆的损伤。
在一个具体的应用场景中,当车辆停放在承载台10上且与居中位置有所偏移时,四个推移组件20中的伸缩机构21同时朝向车辆伸长,其中一条对角线上的两个伸缩机构21首先与对应位置处的轮胎抵接,从而推动车辆向居中位置转动,直接四个伸缩机构均与对应位置处的轮胎抵接,车辆被调整至居中位置。此时,四个伸缩机构21可同时缩短回到最初状态,以调整下一车辆。
基于同样的发明构思,本申请还提供一种自动停车系统,该自动停车系统包括车辆对中装置和搬运小车,该自动停车系统可应用于智能车库。其中,车辆对中装置为上述任一实施方式所述的车辆对中装置,用于将承载于承载台10上的车辆C移动至居中位置,搬运小车用于在车辆C移动至居中位置之后将车辆C搬运至智能车库中的空闲车位,可继续参阅图3a和图3b。车辆对中装置的具体结构和工作原理可参阅上述实施方式,此处不再赘述。
以上所述仅为本申请的实施方式,并非因此限制本申请的专利范围,凡是利用本申请说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本申请的专利保护范围内。
- 车辆对中装置和自动停车系统
- 一种动态车位规划和车辆停放方法、装置及自动停车系统