电缸智能存储仓库
文献发布时间:2023-06-19 13:49:36
技术领域
本公开涉及智能制造技术领域,尤其涉及一种电缸智能存储仓库。
背景技术
电缸是将伺服电机与丝杠一体化设计的模块化产品,将伺服电机的旋转运动转换成直线运动,同时将伺服电机最佳优点-精确转速控制,精确转数控制,精确扭矩控制转变成-精确速度控制,精确位置控制,精确推力控制,实现高精度直线运动系列的全新革命性产品。电缸可实现高强度,高速度,高精度定位,运动平稳,低噪音。所以电缸可以广泛的应用在造纸行业、化工行业、汽车行业、电子行业、机械自动化行业、焊接行业等。
然而,电缸作为一种全新的产品,其存储方式尚未实现智能自动化,仍需人工管理,通过技术工人来完成存储过程中的货物供给及数量统计,现有电缸存储仓库造成了大量人力物力的浪费,且仓储成本高,管理效率较低。
发明内容
(一)要解决的技术问题
本公开提出了一种电缸智能存储仓库,以至少解决上述现有技术中存在的问题。
(二)技术方案
为达到上述目的,本公开提供了一种电缸智能存储仓库,包括:
货架,设置有提货窗口,所述货架内部设置有至少一个电缸存储区,所述电缸存储区用于存放电缸;
人脸识别装置,设置有用户信息验证装置,所述人脸识别装置用于登录电缸智能仓储系统并输入提货信息;
搬运机器人,设置于所述货架中部,用于根据输入的所述提货信息将目标电缸存储区的所述电缸搬运至所述提货窗口;其中,所述目标电缸存储区为所述至少一个电缸存储区中的一个,且所述目标电缸存储区与所述提货信息所指代的所述电缸存储区相对应。
在本公开的一些实施例中,所述货架包括:
桁架,为框架结构,所述桁架用于支撑所述电缸存储区;
侧壁,为一侧开口的门字形围栏,所述侧壁上开设有所述提货窗口,所述侧壁用于包覆所述桁架结构,形成电缸智能存储仓库的工作空间。
在本公开的一些实施例中,所述货架还包括:
计数器,设置于所述货架上,用于统计所述货架中的所述电缸的数量。
在本公开的一些实施例中,所述电缸存储区还包括:
压力传感器,设置于每个所述电缸存储区上,所述压力传感器能够测到所述电缸存储区所受到所述电缸的压力。
在本公开的一些实施例中,所述电缸存储区还包括:
指示灯,设置于所述电缸存储区,所述指示灯与所述压力传感器电连接;其中,当所述电缸存储区受到所述电缸的压力时,所述指示灯指示所述电缸存储区存储有所述电缸;当所述电缸存储区未受到所述电缸的压力时,所述指示灯指示所述电缸存储区未存储所述电缸。
在本公开的一些实施例中,所述人脸识别装置包括:
触摸显示屏,分别与所述计数器电连接和所述指示灯电连接,所示触摸显示屏用于显示所述货架中的所述电缸的数量值,并根据所述指示灯的指示输入所述提货信息。
在本公开的一些实施例中,所述电缸智能存储仓库还包括:
AGV小车,与所述计数器电连接,用于根据所述触摸显示屏显示的所述电缸的数量对所述电缸进行运输;所述搬运机器人将所述电缸搬运至所述未存放所述电缸的所述电缸存储区内。
在本公开的一些实施例中,所述机器人还包括:
智能相机,与所述AGV小车电连接,用于检测所述AGV小车运输来的所述电缸是否合格,若所述电缸合格,则根据所述指示灯的指示将所述电缸搬运至所述未存放所述电缸的所述电缸存储区内。
在本公开的一些实施例中,所述电缸智能存储仓库还包括:
控制柜,分别与所述计数器和所述AGV小车电连接,能够控制所述AGV小车;其中,所述计数器统计的所述电缸的数量小于预设值时,所述控制柜控制所述AGV小车运输所述电缸为所述货架进行所述电缸的补给。
在本公开的一些实施例中,所述搬运机器人包括:
气动吸盘,用于接通外界气源吸住所述电缸,断开外界气源放置所述电缸,实现所述电缸的搬运。
(三)有益效果
从上述技术方案可以看出,本公开的电缸智能存储仓库至少具有以下有益效果其中之一或其中一部分:
(1)本公开中的电缸智能存储仓库可实现了电缸存储仓库通过人脸识别的方式只为某些具有权限的用户开放仓库,提高了电缸智能存储仓库的安全性。
(2)本公开中的电缸智能存储仓库可通过计数器自动统计库存量,并将统计结果显示在触摸显示屏上,便于用户统计电缸数量,免去人工统计,提高了仓库的管理效率。
(3)本公开中的电缸智能仓库设置有搬运机器人,其可根据计数器的统计结果自动为仓库补充货物;同时,该搬运机器人也可根据用户在人脸识别装置所配置的触摸显示屏输入取货信息,自动为用户提取货物。该电缸智能存储仓库的取货、补货等的全过程可实现无人化管理,节省了人力物力,降低了仓储成本,实现了仓储智能化管理。
附图说明
图1是本公开实施例中的电缸智能存储仓库的结构示意图;
图2是图1的A向视图;
图3是本公开实施例中的电缸智能存储仓库拆解侧壁后的结构示意图;
图4是本公开实施例中的AGV小车示意图;
图5是本公开实施例中的搬运机器人示意图。
【附图中本公开实施例主要元件符号说明】
1-货架;
2-桁架;
3-侧壁;
4-人脸识别装置;
5-搬运机器人;
6-电缸存储区;
7-提货窗口;
8-指示灯;
9-控制柜;
10-触摸显示屏;
11-压力传感器;
12-AGV小车;
13-智能相机;
14-气动吸盘;
15-搬运机器人本体。
具体实施方式
本公开提供了一种电缸智能存储仓库,包括:货架、人脸识别装置和搬运机器人。货架设置有提货窗口,所述货架内部设置有至少一个电缸存储区,所述电缸存储区用于存放电缸;人脸识别装置设置有用户信息验证装置,所述人脸识别装置用于登录电缸智能仓储系统并输入提货信息;搬运机器人设置于所述货架中部,用于根据输入的所述提货信息将目标电缸存储区的所述电缸搬运至所述提货窗口;其中,所述目标电缸存储区为所述至少一个电缸存储区中的一个,且所述目标电缸存储区与所述提货信息所指代的所述电缸存储区相对应。该电缸智能存储仓库的取货、补货等的全过程可实现无人化管理,节省了人力物力,降低了仓储成本,实现了电缸仓储的智能化管理。
为使本公开的目的、技术方案和优点更加清楚明白,以下结合具体实施例,并参照附图,对本公开作进一步的详细说明。但是,本公开能够以不同形式实施,而不应当解释为局限于这里提出的实施例。相反地,提供这些实施例将使公开彻底和完全,并且将本公开的范围完全地传递给本领域技术人员。在附图中,为了清楚,层和区的尺寸以及相对尺寸可能被夸大,自始至终相同附图标记表示相同元件。
以下,将参照附图来描述本公开的实施例。但是应该理解,这些描述只是示例性的,而并非要限制本公开的范围。在下面的详细描述中,为便于解释,阐述了许多具体的细节以提供对本公开实施例的全面理解。然而,明显地,一个或多个实施例在没有这些具体细节的情况下也可以被实施。此外,在以下说明中,省略了对公知结构和技术的描述,以避免不必要地混淆本公开的概念。
在此使用的术语仅仅是为了描述具体实施例,而并非意在限制本公开。在此使用的术语“包括”、“包含”等表明了所述特征、步骤、操作和/或部件的存在,但是并不排除存在或添加一个或多个其他特征、步骤、操作或部件。
在此使用的所有术语(包括技术和科学术语)具有本领域技术人员通常所理解的含义,除非另外定义。应注意,这里使用的术语应解释为具有与本说明书的上下文相一致的含义,而不应以理想化或过于刻板的方式来解释。
在使用类似于“A、B和C等中至少一个”这样的表述的情况下,一般来说应该按照本领域技术人员通常理解该表述的含义来予以解释(例如,“具有A、B和C中至少一个的系统”应包括但不限于单独具有A、单独具有B、单独具有C、具有A和B、具有A和C、具有B和C、和/或具有A、B、C的系统等)。
以下结合附图,对本公开的电缸智能存储仓库进行详细说明。
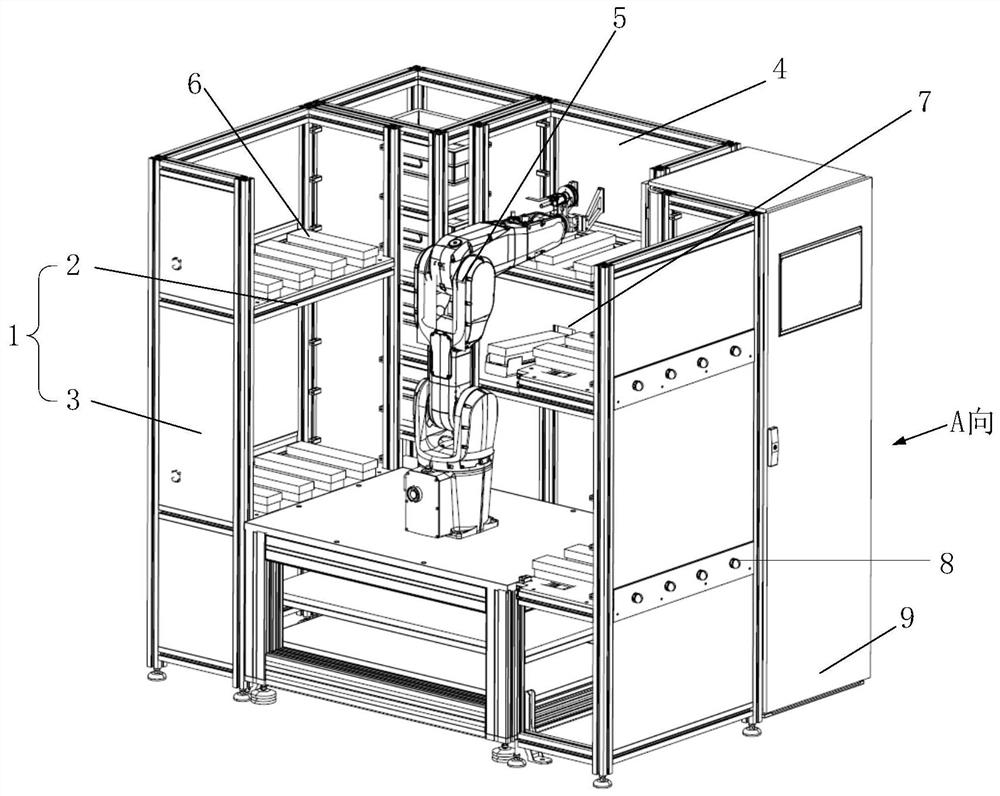
图1示意性示出了根据本公开实施例的电缸智能存储仓库的结构示意图。
如图1所示,本公开提供了一种电缸智能存储仓库,包括:货架1、人脸识别装置4和搬运机器人5。货架1设置有提货窗口7,货架1内部设置有至少一个电缸存储区6,电缸存储区6用于存放电缸;人脸识别装置4设置有用户信息验证装置,所述人脸识别装置4用于登录电缸智能仓储系统并输入提货信息;搬运机器人5设置于货架1中部,用于根据输入的所述提货信息将目标电缸存储区的电缸搬运至所述提货窗口7;其中,所述目标电缸存储区为至少一个电缸存储区6中的一个,且目标电缸存储区与提货信息所指代的电缸存储区相对应。
该电缸智能存储仓库的取货、补货等的全过程可实现无人化管理,节省了人力物力,降低了仓储成本,实现了电缸仓储的智能化管理。
图2示意性示出了图1的A向视图,即根据本公开实施例的电缸智能存储仓库的提货口侧的结构示意图。
该货架1包括:桁架2和侧壁3。桁架2为框架结构,例如:由型材焊接而成,该桁架2用于支撑电缸存储区6。侧壁3为一侧开口的门字形围栏,侧壁3上开设有提货窗口7,侧壁3用于包覆桁架2结构,形成电缸智能存储仓库的工作空间。
上述侧壁3的设置可使电缸智能存储仓库形成一独立空间,可避免外界因素干扰该电缸智能存储仓库的正常运行,避免该电缸智能仓储发生安全隐患。
作为本公开的另一实施例,上述货架1上还可设置计数传感器,通过该计数传感器可统计货架1中的电缸的数量,实现了电缸的智能统计,避免人工统计而出错。
如图2所示,该人脸识别装置4包括触摸显示屏10,该触摸显示屏10分别与计数器电连接和指示灯8电连接,用于显示货架1中的电缸的数量值,并根据指示灯8的指示输入所述提货信息。
图3示意性示出了根据本公开实施例中的电缸智能存储仓库拆解侧壁后的结构示意图。
如图3所示,每个电缸存储区6上还可设置压力传感器11和指示灯8。通过压力传感器11可检测其相对应的电缸存储区6所受到的电缸的压力来确定该电缸存储区6是否存储有电缸。指示灯8与上述压力传感器11电连接。当电缸存储区6受到电缸的压力时,指示灯8指示电缸存储区6存储有电缸;当电缸存储区6未受到电缸的压力时,指示灯8指示电缸存储区6未存储电缸。
通过压力传感器11检测电缸存储区6上是否存储有电缸,以备及时为该电缸智能存储仓库补充货物。
作为本公开的另一实施例,该指示灯8可选取双色指示灯,例如:红绿色指示灯,当压力传感器11未检测到电缸存储区6压力时,指示灯8显示红色,表示该电缸存储区6未存储有电缸;当压力传感器11检测到电缸存储区6压力时,指示灯8显示绿色,表示该电缸存储区6存储有电缸。
计数器统计的电缸数量小于预设值时,则通过运输设备对该仓库进行补货。上述过程由搬运机器人5将运输设备运输来的电缸搬运至未存储有电缸的电缸存储区6上,此时该电缸存储区6所对应的指示灯8则由红色变为绿色,此时表示该电缸存储区6完成补货过程。
图4示意性示出了根据本公开实施例中的AGV小车示意图。
Automated Guided Vehicle,简称AGV,通常也称为AGV小车。AGV小车指装备有电磁或光学等自动导引装置,能够沿规定的导引路径行驶,具有安全保护以及各种移载功能的运输车,工业应用中不需驾驶员的搬运车,以可充电之蓄电池为其动力来源。一般可通过电脑来控制其行进路线以及行为,或利用电磁轨道(electromagnetic path-followingsystem)来设立其行进路线,电磁轨道黏贴于地板上,无人搬运车则依靠电磁轨道所带来的讯息进行移动与动作。
AGV小车12的结构形式如图4所示,该AGV小车12与计数器电连接,用于根据触摸显示屏10显示的电缸的数量对电缸进行运输;搬运机器人5将电缸搬运至未存放电缸的电缸存储区6内。
如图1~图3所示,该电缸智能存储仓库还包括控制柜9。
控制柜9分别与计数器和AGV小车12电连接,能够控制AGV小车12;其中,计数器统计的电缸的数量小于预设值时,控制柜9控制AGV小车12运输电缸为货架1进行电缸的补给。上述过程无人工干预即可完成电缸的补给,大大节省了人力资源,提高了电缸智能存储仓库的
图5示意性示出了根据本公开实施例中的搬运机器人示意图。
作为本公开的另一实施例,该搬运机器人5还包括智能相机13、气动吸盘14和搬运机器人本体15。
智能相机13设置于该搬运机器人本体15上,智能相机13可与AGV小车12电连接,该智能相机13用于检测所述AGV小车12运输来的电缸是否合格,若电缸合格,则根据指示灯8的指示将电缸搬运至未存放电缸的电缸存储区6内。
气动吸盘14设置于该搬运机器人本体15上,用于接通外界气源吸住电缸,断开外界气源放置电缸,实现电缸的搬运。
上述电缸智能存储仓库的运行流程,如操作S1~操作S4:
操作S1:AGV小车12将电缸运输到电缸智能存储仓库中的门字形围栏的一侧开口处。
操作S2:搬运机器人5将AGV小车12运输来的电缸搬运至未存储有电缸的电缸存储区6上。
操作S3:用户根据触摸显示屏10上显示的电缸数量值及指示灯8的指示,选择绿色指示灯所对应的电缸存储区6,并输入提货信息,该提货信息为:包括存储有电缸的电缸存储区6的位置、提货数目等。
操作S4:搬运机器人5根据用户输入的提货信息,将相应数目的电缸分别放置提货窗口7处,以供用户提取电缸,完成电缸的提取。
操作S5:当计数器统计的电缸智能存储仓库内的电缸数目(该电缸数目适时的显示于触摸显示屏10上)小于预设值时,AGV小车12启动并根据触摸显示屏10显示的电缸的数量对电缸进行运输,重复执行操作S1~操作S4。
本公开中的电缸智能存储仓库可实现了电缸存储仓库通过人脸识别的方式只为某些具有权限的用户开放仓库,提高了电缸智能存储仓库的安全性;该电缸智能存储仓库可通过计数器自动统计库存量,并将统计结果显示在触摸显示屏上,便于用户统计电缸数量,免去人工统计,提高了仓库的管理效率。此外,电缸智能仓库设置有搬运机器人,其可根据计数器的统计结果自动为仓库补充货物;同时,该搬运机器人也可根据用户在人脸识别装置所配置的触摸显示屏输入取货信息,自动为用户提取货物。该电缸智能存储仓库的取货、补货等的全过程可实现无人化管理,节省了人力物力,降低了仓储成本,实现了仓储智能化管理。
还需要说明的是,实施例中提到的方向用语,例如“上”、“下”、“前”、“后”、“左”、“右”等,仅是参考附图的方向,并非用来限制本公开的保护范围。贯穿附图,相同的元素由相同或相近的附图标记来表示。在可能导致对本公开的理解造成混淆时,将省略常规结构或构造,并且图中各部件的形状和尺寸不反映真实大小和比例,而仅示意本公开实施例的内容。
除非有所知名为相反之意,本说明书及所附权利要求中的数值参数是近似值,能够根据通过本公开的内容所得的所需特性改变。具体而言,所有使用于说明书及权利要求中表示组成的含量、反应条件等等的数字,应理解为在所有情况中是受到“约”的用语所修饰。一般情况下,其表达的含义是指包含由特定数量在一些实施例中±10%的变化、在一些实施例中±5%的变化、在一些实施例中±1%的变化、在一些实施例中±0.5%的变化。
说明书与权利要求中所使用的序数例如“第一”、“第二”、“第三”等的用词,以修饰相应的元件,其本身并不意味着该元件有任何的序数,也不代表某一元件与另一元件的顺序、或是制造方法上的顺序,该些序数的使用仅用来使具有某命名的一元件得以和另一具有相同命名的元件能做出清楚区分。
此外,除非特别描述或必须依序发生的步骤,上述步骤的顺序并无限制于以上所列,且可根据所需设计而变化或重新安排。并且上述实施例可基于设计及可靠度的考虑,彼此混合搭配使用或与其他实施例混合搭配使用,即不同实施例中的技术特征可以自由组合形成更多的实施例。
以上所述的具体实施例,对本公开的目的、技术方案和有益效果进行了进一步详细说明,应理解的是,以上所述仅为本公开的具体实施例而已,并不用于限制本公开,凡在本公开的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本公开的保护范围之内。
- 电缸智能存储仓库
- 一种用于智能存储仓库的物料转移装置及智能存储仓库